Instituto Tecnológico y de Estudios Superiores de Monterrey
Dirección de Tecnología Educativa
Vicerrectoría Académica
Convolución: Un proceso natural en los sistemas
lineales e invariantes en el tiempo.
Introducción.
En este documento se describe como el proceso de convolución aparece en forma
natural cuando se trata de determinar la respuesta de un sistema lineal e invariante en
el tiempo a una excitación particular. Se analizan solamente los sistemas continuos
pero este proceso tiene su contraparte para los sistemas discretos.
Sistemas lineales e invariantes en el tiempo.
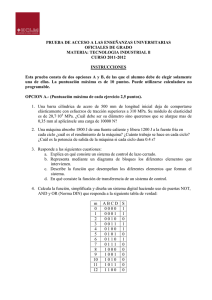
Considere un sistema continuo, lineal e invariante en el tiempo donde la entrada, que
se conoce comúnmente como excitación, está representada por la señal x(t) y la salida,
conocida como respuesta, está representada por y(t), como se muestra en la figura 1.
excitación
x(t)
sistema lineal continuo e
invariante en el tiempo
respuesta
y(t)
Sistema lineal continuo e invariante en el tiempo
Figura 1
Si a un sistema se le aplica una excitación x1 (t ) , la respuesta que se obtiene se
denominará y1 (t ) . Si se le aplica otra excitación x2 (t ) , se obtiene otra respuesta que
se denominará y2 (t ) . Si el sistema es lineal, debe satisfacer lo siguiente:
Respuesta
y1 (t )
y2 (t )
ay1 (t ) + by2 (t )
Excitación
x1 (t )
x2 (t )
ax1 (t ) + bx2 (t )
Lo anterior significa que, si la excitación se multiplica por una constante, la respuesta
también se multiplicará por la misma constante. Además, si se le aplica la suma de dos
excitaciones diferentes, la respuesta será la suma de las respuestas a cada una de las
excitaciones aplicadas en forma independiente.
Un sistema es invariante en el tiempo si satisface lo siguiente:
Excitación
x1 (t )
x1 (t t0 )
Respuesta
y1 (t )
y1 (t t0 )
1
Dr. Jorge A. Olvera R.
Instituto Tecnológico y de Estudios Superiores de Monterrey
Dirección de Tecnología Educativa
Vicerrectoría Académica
Esto significa que, si se aplica al sistema una excitación particular x1 (t ) y se obtiene la
respuesta y1 (t ) ; entonces, si se aplica la misma excitación un tiempo después, se
obtiene la misma respuesta, desplazada el mismo tiempo que se desplazó la
excitación.
Lo anterior implica físicamente que las características del sistema no cambian en el
tiempo. Su respuesta cambia dependiendo de la excitación que se le aplique y la
dinámica interna del sistema mismo, pero la forma en que responde a una excitación
particular es siempre la misma, independiente del instante de tiempo en que se le
aplique.
Una forma de describir un sistema lineal continuo e invariante en el tiempo es
especificar su respuesta al impulso. Para comprender que significa la respuesta al
impulso es necesario definir primero lo que es un impulso.
Función delta de Dirac o función impulso unitario.
Esta función es una abstracción matemática creada por el físico inglés Paul Dirac. Se
aplica en muchas ramas de la ciencia en las cuales se describen procesos mediante
modelación matemática.
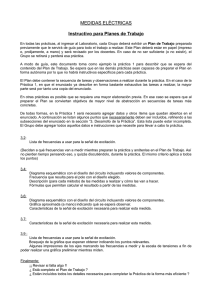
Esta función es el límite cuando T tiende a cero del pulso rectangular mostrado en la
figura 2:
La función límite 1/T
-T/2
T/2
Función delta de Dirac o función impulso unitario
Figura 2
t (seg)
2
Dr. Jorge A. Olvera R.
Instituto Tecnológico y de Estudios Superiores de Monterrey
Dirección de Tecnología Educativa
Vicerrectoría Académica
Cuando T tiende a cero se tiene un pulso rectangular con las siguientes características:
• Su duración tiende a cero.
• Su amplitud tiende a infinito.
• Su área permanece constante y es igual a 1.
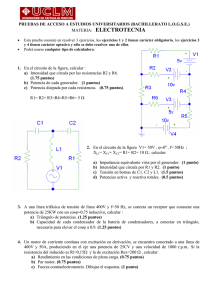
La representación matemática para esta función es (t) y se dibuja como una flecha
vertical donde su altura es proporcional al área bajo el impulso tal como se muestra en
la figura 3.
(t)
t (seg)
Representación de la función delta de Dirac o función impulso unitario
Figura 3
La función delta de Dirac es una abstracción matemática que no existe físicamente
pero es de gran utilidad en las áreas de ingeniería y ciencias.
Respuesta al impulso.
Suponga que un sistema lineal continuo e invariante en el tiempo no tiene energía
almacenada internamente y se le aplica la excitación x(t)= (t), es decir, se la aplica
como excitación un impulso unitario en tiempo cero con condiciones iniciales cero para
el sistema. La respuesta del sistema para este caso se conoce como respuesta al
impulso y se denominará h(t).
A continuación se muestran varias excitaciones y sus correspondientes respuestas,
sabiendo que el sistema es lineal e invariante en el tiempo:
Excitación
(t )
a (t )
(t t0 )
a (t t0 )
a (t t1 ) + b (t t2 )
x(t )
Respuesta
h(t )
a h(t )
h(t t0 )
a h(t t0 )
a h(t t1 ) + b h(t t2 )
¿?
3
Dr. Jorge A. Olvera R.
Instituto Tecnológico y de Estudios Superiores de Monterrey
Dirección de Tecnología Educativa
Vicerrectoría Académica
Antes de tratar de determinar la respuesta del sistema para una excitación general x(t)
se analizará un caso particular para empezar a analizar el proceso.
Respuesta para un sistema particular.
Suponga que la respuesta al impulso de un sistema particular es:
0
para t < 0
h(t ) = 2e2t
para t 0
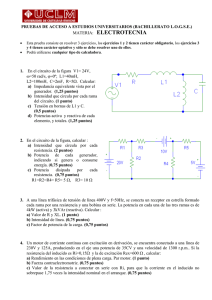
Si se le aplica la excitación dada por x(t ) = 2(t 1) + 3(t 1.5 ) + (t 3 ) ¿Cuál será la
respuesta del sistema?
De acuerdo con la analizado anteriormente, la respuesta del sistema será:
y(t ) = 2h(t 1) + 3h(t 1.5 ) + h(t 3 )
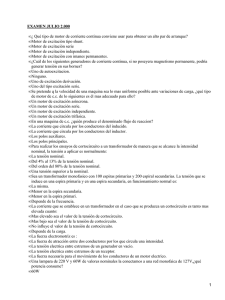
En la figura 4 se muestra la respuesta del sistema para cada una de las componentes
de la excitación y la respuesta del sistema para la excitación x(t).
Respuesta del sistema a la excitación x(t ) = 2(t 1) + 3(t 1.5 ) + (t 3 )
Figura 4
4
Dr. Jorge A. Olvera R.
Instituto Tecnológico y de Estudios Superiores de Monterrey
Dirección de Tecnología Educativa
Vicerrectoría Académica
La respuesta del sistema en este caso es:
0
para t < 1
4e2( t 1)
para 1 t < 1.5
y(t ) = 2( t 1)
+ 6e2(t 1.5 )
para 1.5 t < 3
4e
2( t 1)
2(t 1.5 )
2( t 3 )
+ 6e
+ 2e
para t 3
4e
Obsérvese lo siguiente:
• Para tiempos comprendidos entre 1 y 1.5 segundos, la respuesta del sistema es
solamente la respuesta al impulso aplicado en t=1.
• Para tiempos comprendidos entre 1.5 y 3 segundos, la respuesta del sistema
ahora está formada por la respuesta al impulso aplicado en t=1 más la respuesta
al impulso aplicado en t=1.5.
• Para tiempos mayores o iguales a 3 segundos, la respuesta del sistema está
compuesta por la respuesta al impulso aplicado en t=1 más la respuesta al
impulso aplicado en t=1.5 más la respuesta al impulso aplicado en t=3.
Nótese que para cada intervalo de tiempo se toma en cuenta tanto el tamaño del
impulso o impulsos que ocurrieron antes del tiempo en que se está evaluando la
respuesta así como la diferencia entre este tiempo y el tiempo en que ocurrió cada
impulso.
La convolución de la excitación y la respuesta al impulso
Ahora se procederá a determinar la respuesta del sistema a una excitación general x(t)
tomado en cuenta el análisis realizado anteriormente.
Se muestra de nuevo la excitación aplicada al sistema y la respuesta obtenida en cada
caso:
Respuesta
h(t )
a h(t )
h(t t0 )
x( ) h(t )
Excitación
(t )
a (t )
(t t0 )
x( ) (t )
En la última excitación, x( ) y son constantes como lo son a y t0 en los casos
anteriores.
Ahora, ¿qué pasaría si al sistema se le aplica como excitación una suma de muchos
impulsos como el descrito en el último caso? Dado que el sistema es lineal e invariante
en el tiempo, la respuesta sería una suma de las respuestas a cada uno de los
impulsos que contiene la excitación.
5
Dr. Jorge A. Olvera R.
Instituto Tecnológico y de Estudios Superiores de Monterrey
Dirección de Tecnología Educativa
Vicerrectoría Académica
La duración de un impulso tiende a cero, es decir, pude ser considerado como una
diferencial. La suma de diferenciales es una integral, entonces, se tendría lo siguiente:
Excitación
x( ) (t )
Respuesta
x( ) h(t )
x( ) h(t ) d
x( ) (t ) d
La integral que representa la respuesta del sistema en el último caso es una integral de
convolución. Esta integral representa la convolución de la respuesta al impulso y la
excitación aplicada.
La excitación es también una convolución de la señal aplicada y la función delta de
Dirac. La convolución de cualquier señal y la función impulso unitario da como
resultado la misma señal:
x( ) (t ) d = x(t )
Entonces, la respuesta de un sistema lineal e invariante en el tiempo a una excitación
general es la convolución de la excitación aplicada y la respuesta al impulso del
sistema:
y(t ) =
x( ) h(t ) d
La operación de convolución es conmutativa. Esto se puede observar definiendo
t en la integral anterior. Despejando de la definición se tiene que:
= t d = d
Sustituyendo la definición anterior en la integral, se tiene lo siguiente:
y(t ) =
x( ) h(t ) d = x(t ) h( ) (-d ) = x(t ) h( ) d
Cambiando el signo de la integral se invierten los límites de integración:
y(t ) = x(t ) h( ) d =
x(t ) h( ) d =
h( ) x(t ) d
6
Dr. Jorge A. Olvera R.
Instituto Tecnológico y de Estudios Superiores de Monterrey
Dirección de Tecnología Educativa
Vicerrectoría Académica
Análisis del sistema particular que se utilizó como ejemplo.
Se utilizó como ejemplo un sistema particular cuya respuesta al impulso es:
0
para t < 0
h(t ) = 2e2t
para t 0
El modelo de este sistema es una ecuación diferencial lineal, de primer orden, con
coeficientes constantes. Este modelo es:
1 dy(t )
+ y(t ) = x(t )
2 dt
La ecuación diferencial es lineal debido a que el sistema que representa es lineal. Los
coeficientes de la ecuación diferencial son constantes porque el sistema es invariante
en el tiempo. Ahora se procederá a resolver la ecuación diferencial para una excitación
x(t) general.
Si se multiplican ambos lados de la ecuación por la función e2t se tiene lo siguiente:
1 2t dy(t )
e
+ e2t y(t ) = e2t x(t )
2
dt
El lado izquierdo es la derivada de un producto como se muestra:
d 1 2t
2t
e y(t ) = e x(t )
dt 2
Si ahora se integran ambos lados de la ecuación anterior respecto al tiempo, se
obtiene:
1 2t
e y(t ) = e2t x(t ) dt + c
2
La constante c depende de las condiciones iniciales. Si se considera que el sistema no
tiene energía almacenada internamente, esta constante es cero.
La integral que queda en el lado derecho de la ecuación puede escribirse como sigue,
donde la variable de integración ahora es :
1 2t
e y(t ) = e2t x(t ) dt = e2 x( ) d
2
Despejando la respuesta del sistema de la ecuación anterior:
y(t ) = 2e2t e2 x( ) d
La integral, como se mencionó anteriormente, está sobre la variable y la variable t es
una constante para el proceso de integración. Por consiguiente, el factor que está
multiplicando a la integral puede introducirse en el integrando:
7
Dr. Jorge A. Olvera R.
Instituto Tecnológico y de Estudios Superiores de Monterrey
Dirección de Tecnología Educativa
Vicerrectoría Académica
y(t ) =
2e2t e2 x( ) d = 2e2(t )x( ) d = h(t ) x( ) d
Esta es otra forma de ver que la respuesta de este sistema para una excitación general
es la convolución de su respuesta al impulso y la excitación aplicada.
Este último resultado obtenido para este caso particular realmente se cumple para
cualquier sistema lineal e invariante en el tiempo. La respuesta a una excitación
particular es la convolución de su su respuesta al impulso y la excitación aplicada..
Si la condición inicial para el ejemplo anterior no fuera cero, es decir, si el sistema
tuviera almacenada una cierta energía en un tiempo t0, la constante c sería igual a
y(t0 ) y la respuesta del sistema estaría dada por:
t
y(t ) =
h(t ) x( ) d + 2e2(t t
0
)
y(t0 )
t0
En esta solución, la integral se conoce como respuesta forzada y depende de la
excitación aplicada y las características propias del sistema. La parte que depende de
y(t0 ) se conoce como respuesta natural y depende solamente de las condiciones
iniciales, es decir, de la energía almacenada internamente en el sistema. La respuesta
natural no depende de la excitación.
Obsérvese que si la excitación aplicada al sistema es un impulso unitario en tiempo
cero y el sistema no tiene energía almacenada internamente, la respuesta del sistema
es precisamente su respuesta al impulso.
y(t ) =
h(t ) x( ) d = h(t ) ( ) d = h(t )
8
Dr. Jorge A. Olvera R.
 0
0