Análisis Dinámico de un Mecanismo de Manivela Biela Corredera.
Anuncio

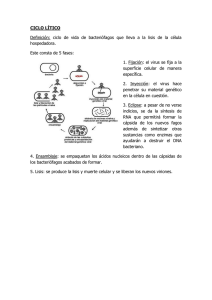
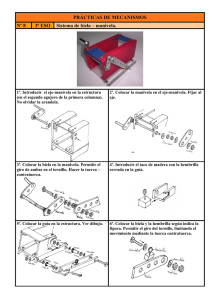
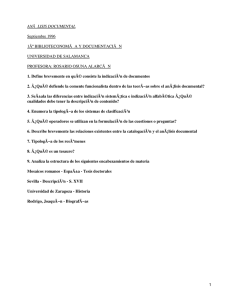
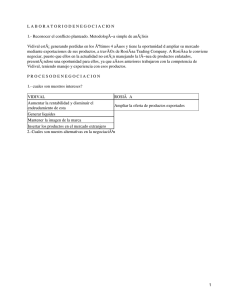
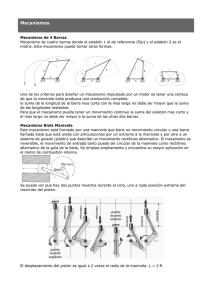
Análisis Dinámico de un Mecanismo de Manivela Biela Corredera. José Marı́a Rico Martı́nez Departamento de Ingenierı́a Mecánica. Campus Irapuato-Salamanca, Universidad de Guanajuato. Comunidad de Palo Blanco. CP 36885, Salamanca, Gto., México E-mail: [email protected] 1 Introducción. Estas notas tienen como objetivo mostrar la solución del análisis dinámico de un mecanismo plano de manivela biela corredera e ilustrar, mediante este ejemplo sencillo, las diferentes tareas del análisis dinámico de maquinaria. 2 Análisis Cinemático del Mecanismo de Manivela Biela Corredera. Frecuentemente, el análisis dinámico de cualquier máquina inicia con el análisis cinemático del, o de los, mecanismo(s) que constituyen la máquina. Este caso, no es la excepción, de manera que en esta sección se analiza con relativa profundidad el análisis cinemático de un mecanismo de manivela biela corredera. Para tal fin, se obtendrán las ecuaciones correspondientes al análisis de posición, velocidad y aceleración del mecanismo. Considere el mecanismo de biela manivela corredera mostrado en la figura 1. La ecuación del lazo del mecanismo está dado por ~a2 + ~a3 = ~e + ~s. (1) Si se seleccionan los ángulos asociados a los vectores, θe = 270◦ , θ2 , θ3 , θs = 0◦ , a partir del semieje positivo X, las componentes escalares de la ecuación (1), a lo largo de los ejes X y Y están dadas por a2 Cθ2 + a3 Cθ3 a2 Sθ2 + a3 Sθ3 = = e Cθe + s Cθs e Sθe + s Sθs (2) o, substituyendo los valores de los ángulos θs y θe , se tiene que a2 Cθ2 + a3 Cθ3 a2 Sθ2 + a3 Sθ3 = = s −e (3) Debe notarse que los parámetros del mecanismo son e, θe , a2 , a3 , θs , mientras que las variables son θ2 , θ3 y s. Mas aún, si el eslabón motriz es el eslabón 2, el ángulo θ2 aun cuando es una variable, es 1 Figure 1: Mecanismo de Manivela Biela Corredera. un dato conocido y necesario para realizar el analisis de posición, de modo que las dos ecuaciones (3) cuya solución constituye el análisis de posición están dadas por f1 (θ3 , s) = a2 Cθ2 + a3 Cθ3 − s = 0 f1 (θ3 , s) = a2 Sθ2 + a3 Sθ3 + e = 0 (4) La matriz Jacobiana asociada a este sistema de dos ecuaciones con dos incógnitas está dada por # " ∂f1 ∂f1 −a3 S θ3 −1 ∂θ ∂s 3 = . (5) J(θ3 , s) = ∂f2 ∂f2 a3 C θ 3 0 ∂θ ∂s 3 Es importante notar que el determinante de la matriz jacobiana está dado por |J(θ3 , θ4 )| = a3 C θ3 . (6) Debe notarse que la matriz Jacobiana es singular cuando C θ3 = 0 o θ3 ∈ {90◦ , −90◦ }. Los valores de θ3 = 90◦ o θ3 = −90◦ corresponden a posiciones de puntos muertos, que indican los lı́mites del movimiento de la manivela, o eslabón 2. Con las ecuaciones (4, 5) es posible realizar el análisis de posición del mecanismo de manivela biela corredera. Suponga ahora que se ha realizado el análisis de posición del mecanismo de manivela biela corredera, derivando las ecuaciones (4), con respecto al tiempo se obtienen las ecuaciones correspondientes al análisis de velocidad del mecanismo de manivela biela corredera. Estas ecuaciones están dadas por g1 (ω3 , ṡ) = −a2 Sθ2 ω2 − a3 Sθ3 ω3 − ṡ = 0 g1 (ω3 , ṡ) = a2 Cθ2 ω2 + a3 Cθ3 ω3 = 0 (7) Debe notarse que, una vez resuelto el análisis de posición del mecanismo de manivela biela corredera, las ecuaciones (7) representan un sistema lineal de dos ecuaciones con dos incógnitas, ω3 y ṡ. 2 Este sistema de ecuaciones puede escribirse en forma matricial como a2 Sθ2 ω2 ω3 −a3 S θ3 −1 = −a2 Cθ2 ω2 ṡ a3 C θ 3 0 (8) Debe notarse que la matriz de coeficientes de la ecuación (8) es la misma matriz jacobiana del sistema no lineal de ecuaciones asociada al análisis de posición del mecanismo. Por lo que, excepto en un caso —cuando los resultados del análisis de posición coinciden de manera exacta con una posición de puntos muertos, lo cual es altamente improbable—, si el análisis de posición tiene solución, entonces el análisis de velocidad del mecanismo tiene una solución única. La solución del análisis de velocidad del mecanismo de manivela biela corredera está dada por a2 S θ2 ω2 −1 −a2 C θ2 ω2 0 a2 C θ 2 ω3 = = −ω2 (9) a3 C θ 3 a3 C θ 3 y −a3 S θ3 a2 S θ2 ω2 a3 C θ3 −a2 C θ2 ω2 ṡ = a3 C θ 3 = ω2 a2 S(θ3 − θ2 ) C θ3 (10) Derivando las ecuaciones (7), con respecto al tiempo, se obtienen las ecuaciones correspondientes al análisis de aceleración del mecanismo de biela manivela corredera. Estas ecuaciones vienen dadas por h1 (α3 , s̈) = −a2 Sθ2 α2 − a2 Cθ2 ω22 − a3 Sθ3 α3 − a3 Cθ3 ω32 − s̈ = 0 h1 (α3 , s̈) = a2 Cθ2 α2 − a2 Sθ2 ω22 + a3 Cθ3 α3 − a3 Sθ3 ω32 = 0. (11) De nueva cuenta, si previamente se han resuelto los análisis de posición y velocidad del mecanismo de biela manivela corredera, las ecuaciones (11) representan un sistema lineal de dos ecuaciones con dos incógnitas α3 , s̈. Este sistema de ecuaciones puede escribirse en forma matricial como a2 Sθ2 α2 + a2 Cθ2 ω22 + a3 Cθ3 ω32 α3 −a3 S θ3 −1 (12) = −a2 Cθ2 α2 + a2 Sθ2 ω22 + a3 Sθ3 ω32 s̈ a3 C θ 3 0 De nueva cuenta, la matriz de coeficientes de la ecuación (12) es la misma matriz jacobiana del sistema no lineal de ecuaciones asociada al análisis de posición del mecanismo. Por lo que, excepto en un caso, si el análisis de posición tiene solución, entonces el análisis de aceleración del mecanismo tiene una solución única. En forma simbólica, la solución del análisis de aceleración viene dado por a2 Sθ2 α2 + a2 Cθ2 ω22 + a3 Cθ3 ω32 −1 −a2 Cθ2 α2 + a2 Sθ2 ω22 + a3 Sθ3 ω32 0 α3 = (13) a3 C θ 3 y −a3 S θ3 a2 Sθ2 α2 + a2 Cθ2 ω22 + a3 Cθ3 ω32 a3 C θ3 −a2 Cθ2 α2 + a2 Sθ2 ω22 + a3 Sθ3 ω32 (14) s̈ = a3 C θ 3 3 3 Determinación de las Aceleraciones de los Centros de Masas de los Eslabones. Una vez realizado el análisis cinemático del mecanismo de manivela biela manivela, es necesario determinar las aceleraciones de los centros de masas de los eslabones del mecanismo. Considere la Figura 2 que muestra los vectores desde una revoluta hasta el centro de masas de los eslabones. Figure 2: Vectores Adicionales Para la Localización de los Centros de Masas de los Eslabones de un Mecanismo de Manivela Biela Corredera. Las aceleraciones de los centros de masas de los eslabones están dadas por α ~ 2 × ~rG2 − ω22 ~rG2 ~aG2 = ~aG3 ~aG4 = α ~ 2 × ~a2 − ω22 ~a2 + α ~ 3 × ~rG3 − ω32 ~rG3 = ~aC (15) (16) (17) a2x î + a2y ĵ = a2 C θ2 î + S θ2 ĵ a3x î + a3y ĵ = a3 C θ3 î + S θ3 ĵ h rG2x î + rG2y ĵ = rG2 C (θ2 + φ2 ) î + S (θ2 + φ2 ) h rG3x î + rG3y ĵ = rG3 C (θ3 + φ3 ) î + S (θ3 + φ3 ) (18) donde ~a2 = ~a3 = ~rG2 ~rG3 4 = = (19) ĵ ĵ i i (20) (21) Análisis Dinámico de un Mecanismo de Manivela Biela Corredera. En esta sección, se realizará el análisis dinámico del mecanismo manivela biela corredera mediante el método de Newton-Euler, este es el método estudiado en los cursos elementales de Dinámica. El método de Newton-Euler no es necesariamente el más eficaz, pero es el que, por el momento, todos estamos familiarizado. 4 Figure 3: Diagramas de Cuerpo Libre de los Eslabones de un Mecanismo de Manivela Biela Corredera. El método consiste en dibujar el diagrama de cuerpo rı́gido para cada uno de los eslabones de la máquina. La Figura 3 muestra los diagramas de cuerpo libre de los eslabones de un mecanismo de manivela biela corredera. Debe notarse que se ha aplicado la tercera ley de Newton de manera que las reacciones en los dos elementos de los pares cinemáticos del mecanismo son iguales y de sentidos contrarios, además aparecen los pesos de los eslabones y la fuerza Fw que representa el negativo de la fuerza que el pistón debe ejercer sobre la resistencia a vencer. Es importante hacer notar que el pistón o corredera del mecanismo se ha modelado de manera que el centro de masas G4 coincida con el punto C, la revoluta entre los eslabones 3 y 4, esta suposición permite simplificar de manera significativa el proceso de solución. Las ecuaciones de Newton-Euler para cada uno de los eslabones del mecanismo son 1. Para la manivela ΣFx = M2 aG2x FAx − FBx = M2 aG2x (22) ΣFy = M2 aG2y FAy − FBy − M2 g = M2 aG2y TA k̂ + ~rG2 × −M2 g ĵ + ~rB/A × −FBx î − FBy ĵ = IA α2 k̂ (23) ΣTAz = IA α2 donde esta última ecuación puede escribirse como h io n TA k̂ + rG2 C (θ2 + φ2 ) î + S (θ2 + φ2 ) ĵ × −M2 g ĵ n o + a2 C θ2 î + S θ2 ĵ × −FBx î − FBy ĵ = (24) IA α2 k̂ o, en forma reducida, en dos diferentes versiones TA − M2 g rG2 C (θ2 + φ2 ) + a2 (−FBy C θ2 + FBx S θ2 ) = I A α2 . (25) TA − M2 g rG2x − a2x FBy + a2y FBx = I A α2 . (26) 5 2. Para la biela ΣFx = M3 aG3x FBx − FCx = M3 aG3x ΣFy = M3 aG3y FBy − FCy − M3 g = M3 aG3y (28) ~rB/G3 × FBx î + FBy ĵ + ~rC/G3 × −FCx î − FCy ĵ = IG3 α3 k̂ (29) ΣTG3z = IG3 α3 (27) donde esta última ecuación puede escribirse como h io n −rG3 C (θ3 + φ3 ) î + S (θ3 + φ3 ) ĵ × FBx î + FBy ĵ n o + [a3 C θ3 − rG3 C (θ3 + φ3 )] î + [a3 S θ3 − rG3 S (θ3 + φ3 )] ĵ × −FCx î − FCy ĵ = IG3 α3 k̂ o, en forma reducida, en dos diferentes versiones, −rG3 C (θ3 + φ3 ) FBy + rG3 S (θ3 + φ3 ) FBx − [a3 C θ3 − rG3 C (θ3 + φ3 )] FCy + [a3 S θ3 − rG3 S (θ3 + φ3 )] FCx −rG3x FBy + rG3y FBx − (a3x − rG3x ) FCy + (a3y − rG3y ) FCx = = IG3 α3 . IG3 α3 (30) (31) 3. Para la corredera ΣFx = M4 aG4x ΣFy = M4 aG4y FCx − Fw = M4 aG4x FCy − FDy − M4 g = 0 (32) (33) (34) Es importante notar que para la corredera, eslabón 4, no se presenta la ecuación de ΣTG4 = 0, pues todas las fuerzas pasan por el punto G4 . El análisis dinámico conduce a un sistema lineal de 8 ecuaciones con 8 incógnitas, dadas por FAx , FAy , TA , FBx , FBy , FCx , FCy , FDy . el cual puede resolverse de manera muy simple mediante computadora digital. Este análisis dinámico se conoce como Análisis Dinámico Directo, y se define como: Conocida la geometrı́a del mecanismo o máquina, conocida la o las variables de entrada y sus primera y segunda derivadas, conocidas las propiedades másicas e inerciales de los eslabones del mecanismo, determine las reacciones en los pares cinemáticos del mecanismo o máquina y el (o los) torques o fuerzas motrices necesarios para la operación del mecanismo o máquina. Los resultados de este análisis dinámico directo constituyen los datos iniciales para realizar el análisis de esfuerzo en los eslabones de una máquina o para seleccionar el tipo y dimensiones de los cojinetes, planos o de rodamientos, que deben instalarse en las revolutas de la máquina. Desafortunadamente, en los programas integrados de análisis dinámico y de esfuerzos de maquinaria, tales como c o Ansys c esta fase no es transparente para el usuario; es decir el usuario no percibe que Adams estos cálculos se están realizando y en ocasiones no tiene control sobre el proceso de solución. Existe otro tipo de análisis dinámico conocido como Análisis Dinámico Inverso, y se define como: Conocida la geometrı́a del mecanismo o máquina, conocidas las propiedades másicas e inerciales de los eslabones del mecanismo, y conocidas el (o los) torques o fuerzas motrices necesarios para la operación del mecanismo o máquina, determine el movimiento de la máquina; es decir determine, como función del tiempo, la posición de la máquina; es decir la posición de cada uno de los eslabones de la máquina. Debe notarse que si se conocen las posiciones de los eslabones de la máquina, es fácil determinar las velocidades y aceleraciones de los eslabones. 6 Desafortunadamente, la solución del análisis dinámico inverso requiere la solución de una o varias ecuaciones diferenciales, usualmente no lineales, o bien la solución de sistemas de ecuaciones diferenciales y algebraicas. Es decir sistemas de ecuaciones diferenciales cuya solución debe además satisfacer un sistema de ecuaciones no-lineales, este es un problema bastante mas complicado que los que hemos resuelto hasta la fecha. 7