5Transductores Microfono
Anuncio

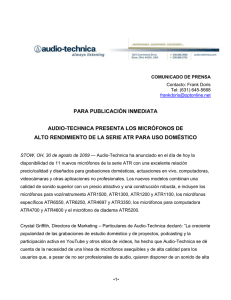
5. Transductores. Micrófonos. Los micrófonos son transductores que convierten señal acústica en señal eléctrica. 5.1 Características Básicas Sensibilidad HM = |e| / |p| ó en dBs HM(dB) = 20.log(|e|/|p|) = HM(dB) = 20.log(HM / Href) Href = 1V/Pa También se suele dar en mV/µbar ó en dBs referidos a1V/µbar Directividad Cociente de la tensión en voltios en circuito abierto en bornas de micrófono entre la presión sonora que la produce. Se suele dar a 250 Hz ó a 1 KHz según fabricantes D = Sensibilidad Máxima / Sensibilidad promedio Factor direccional. Patrón de emisión (ver 5.2 Tipos de micrófonos según su directividad). Respuesta en frecuencias Impedancia Nivel de ruido Margen dinámico Distorsión, TDH = Distorsión armónica Total Comportamiento ante humedad, campos magnéticos, vibración, presión ambiental, temperatura, sol,... 5.2 Tipos de micrófonos según su directividad De presión – omnidireccional Un recinto cerrado por una membrana es sensible a la presión, cambia de volumen en función de la presión del aire circundante. Si es pequeño comparado con la longitud de onda (y lo será porque nos interesa que el micrófono mida el sonido en un punto) su factor direccional es el de una fuente simple (equivalente a una fuente esférica), es decir, omnidireccional. Micrófonos y altavoces son recíprocos, igual geometría igual direccionalidad. F=kte De velocidad – bidireccional Si la membrana está libre por ambos lados no se mueve por la presión en una de sus caras sino por la diferencia de presión entre sus caras. La derivada de la presión es la velocidad. La membrana, que además es pequeña y ligera, se mueve conjuntamente con el aire circundante. Su direccionalidad es igual que la de un altavoz sin caja, asimilable a un doblete acústico F = ksd⋅p⋅cosφ Cardioide – F = a⋅½⋅(1+cosφ) Sumando la respuesta de un micrófono de presión y otro de velocidad se obtiene una respuesta con forma cardioide, máxima delante y nula detrás. Esta suma se podría hacer usando dos micrófonos distintos ó mejor fabricando uno que tenga en parte un recinto que haga que la membrana responda a la presión frontal pero que tenga algún orificio para que entre también presión a la cara posterior, atenuada en la medida adecuada. Hipercardioide –F = a⋅½⋅(1+3⋅cosφ) Supercaridoide – F = a⋅(0’37+0’63⋅cosφ) Para diferentes ajustes de la relación entre presión frontal y trasera se obtienen factores direccionales más estrechos a costa de un lóbulo trasero no nulo El diseño del camino acústico, con cavidades que dan compliancia (elasticidad), conductos que dan inertancia (masa, inercia) y poros que dan resistencia, permite además ajustar la respuesta frecuencial del sistema para intentar que combinado con la respuesta mecánica de la membrana móvil (masa, elasticidad, amortiguación) sea plana. Esto es muy útil en los micrófonos de bobina móvil ya que la frecuencia de resonancia mecánica suele estar dentro de la banda de trabajo. El circuito acústico permite añadir un cero a esa misma frecuencia. En aplicaciones en que se requiere gran directividad se utilizan otras configuraciones más directivas: Parábola: muy directiva, “mucho trasto” Array de disparo en el extremo y micrófono rifle (ver tema 2.2): un array de N fuentes (ó micrófonos) desfasadas justo lo que tarda el sonido en llegar de una a otra enfoca en la dirección del eje, más cuanto mayor sea N. En lugar de usar N micrófonos y sumar sus señales eléctricas se usa un sólo micrófono al que llegan sumadas las ondas que han entrado por orificios en un tubo largo. La distancia recorrida por el sonido desde una fuente hasta el diafrágma del micro a través de diferentes orificios es distinta por lo que se suman con fases distintas y queda debilitado, excepto si viene de frente en cuyo caso todos los caminos tienen igual distancia y la suma es máxima. Matriz. Si disponemos de esos N micrófonos podemos elegir el ángulo en que se enfoca variando el desfase de cada señal antes de sumarlas. Con una matriz podemos elegir los dos ángulos, la dirección. Además con el mismo conjunto de micrófonos podemos obtener simultáneamente las señales enfocadas a diferentes ángulos. Interferometría laser. Mediante láser se pueden medir desplazamientos minúsculos de una superficie que puede estar muy alejada. 5.3 Tipos de micrófonos según su tecnología Carbón Una cavidad con granulos de carbón (grafito ó antracita) que son comprimidos por el desplazamiento de un vástago unido h ⋅y al diafragma. La resistencia del carbón varía en función de la compresión. No genera energía, se aplica una tensión Ro≈200Ω para que la corriente que circula varíe en función de la variación de resistencia. Eo Bajo costo. Durabilidad. Baja fidelidad. La resistencia depende del desplazamiento y Rc=Ro+h⋅yoejωt La corriente tiene el término de continua más la señal hy 0 << R0 2 E0 E 0 hy 0 cos ωt (hy 0 ) 1 + cos 2 ωt = i0 + i a 1 − i= = + + ... 2 R0 + hy 0 cos ωt R0 Ro 2 R0 Es como si hubiera una fuente de tensión E hy ea = R0 ia = − 0 0 cos ωt R0 ea Ro Eo Dinámicos: Cinta F=B⋅I⋅L Cinta metálica vertical arrugada dentro de un campo magnético. De velocidad. Frágil Muy usados en los años 50. Cinta impresa, espiral de aluminio dentro de diafragma de poliéster entre 4 imanes toroidales. Bobina movil F=B⋅I⋅L Misma estructura que un altavoz electrodinámico, hasta el punto de que son reversibles, un micrófono de bobina móvil se puede usar como altavoz y un altavoz electrodinámico como micrófono. Las diferencias vienen de que un micrófono es más pequeño (para medir el sonido en un solo punto) y conduce menos corriente (la que lleva la energía obtenida del sonido). El diafragma es un casquete esférico de aluminio, plástico ó papel. Imán anillo circular, campo magnético radial. Bobina de hilo muy fino (no necesita soportar corriente y nos conviene poca masa) predominantemente resistiva a menos 1000 Hz. Resonancia de circuito abierto en los márgenes de audio. A pesar del hilo fino tienen demasiada masa para que la resonancia este en frecuencias más altas que el audio, y aumentar la rigidez reduciría el desplazamiento y por tanto la sensibilidad. También aumentar la amortiguación reduciría la sensibilidad. La solución suelen ser circuitos acústicos con una antirresonancia para aplanar el pico (pero respuesta irregular). Masa elevada ==> mala respuesta en alta frecuencia (y ataques); sensible a vibración y golpeteo. La bobina se comporta como antena captando ruido, se corrige con otra bobina fija arrollada al revés, bobina anti-hum. La sensibilidad suele ser baja -60/-80 dB re 1V/µbar Bajo coste; uso sencillo; robusto; salida de tensión de nivel medio; admite altos niveles de presión sin saturar; resistencia de salida baja, 10-100 ohmios ==> vale cable largo. Junto al micro se suele poner un transformador de relación 3:1 ó similar para elevar la tensión y adaptar la impedancia a la del cable (75 – 300 ohmios). Elevado margen dinámico, de 20 a 140 dB SPL Poco sensibles a humdead y temperatura Variedad de modelos. Algunos modelos direccionales y cardioide tienen 2 transductores, para bajas y para altas frecuencias con red de cruce (crossover). Magnético mide variación de reluctancia Electrostáticos: Piezoeléctrico También reversible. Alta impedancia mecánica y mucha rigidez ==> bueno para agua y alta frecuencia --> sonar Condensador Placa fija y placa móvil-diafragma de acero, aluminio, vidrio ó poliéster metalizado. Polarizado con tensión, al moverse el diafragma cambia la capacidad y se produce corriente. C0 = ε.s/x0 = 27'8.a2/x0 pF s superficie, a es el radio, εaire = 8'85.10-12F/m En reposo C0 = ε.s/d En funcionamiento C0 = ε.s/(d-ym) ym = desplazamiento promedio (analizando las vibraciones en la membrana circular salen ecuaciones de Bessel que indican que a bajas frecuencias (ka<1) ym es independiente de la frecuencia. Desarrollo Taylor y aproximo para pequeños desplazamientos y considero un tono. C = Co + Coyoejωt/d = Co + C1ejωt Ecuación de malla...Ecuación diferencial... Solución ec.dif. si Co << C1 i=EC1/C0... Características: Alta impedancia interna (decenas de picofaradios). Para adaptar a los cables blindados normales hay que amplificar junto a la cápsula. Se suele hacer con un FET (alta impedancia de entrada), antes con válvulas pero no con transistores. Por tanto requiere alimentación Calibración constante en el tiempo Requiere polarización (tensión de alimentación), se usa conexión fantasma Electret Es un micrófono de condensador pero ya polarizado (con un material que tiene carga “fija”, invento “reciente”). Ello da gran comodidad porque evita la alimentación. Pero también da mejor resultado si se amplifica in situ, por lo que también vienen con FET incorporado que hay que alimentar. En los conectores Jack estéreo se puede-suele usar un canal para alimentar. 5.4 Técnicas de toma de sonido Para cada situación concreta de grabación (tipo y posición de la fuente de sonido, entorno de grabación, etc.) conviene elegir bien la posición y tipo del micrófono para obtener el mejor resultado. Por ejemplo en una sala de videoconferencia podemos usar un solo micrófono fijo para captar la voz de cualquiera de las personas de la sala. En ese caso el micro estará bastante lejos de la fuente de sonido, y si esta encima de una superficie rígida como una mesa le llegará una onda reflejada poco después de la original y con intensidad similar. Para algunas frecuencias la suma reforzará la señal y para otras la anulará (las que la diferencia de recorridos desfase media longitud de onda). La respuesta frecuencial no es plana. Una solución es utilizar Microfonos de Zona de Presión, PZM, diseñados para colocarse pegados a la mesa. En este caso la onda directa y la reflejada llegan a la vez, en fase. Además de conseguir respuesta frecuencial plana la sensibilidad aumenta 6 dB. Microfonos Lavalier, de corbata. Usados para fijar en la solapa dejando libertad de movimiento. Al no estar frente a la boca los agudos llegan más débiles que los graves, así que para compensarlo suelen tener menor respuesta a los graves. Micrófonos inalámbricos. En lugar de usar cable para llevar la señal eléctrica desde el micrófono hasta el equipo amplificador se transmite inalámbricamente. Así se evita el engorro y los ruidos debidos al cable a costa de mayor complejidad. Se puede transmitir por infrarrojos (los LED son muy lineales) pero los obstáculos pueden estropear la señal. Suele transmitirse por radio modulada en la banda VHF ó UHF (rodea los obstáculos). Un problema es que en algunos puntos la señal directa ser cancelada por las reflejadas. Se arregla usando dos antenas receptoras y usando la mejor señal de ambas, es muy improbable que la cancelación coincida en las dos antenas. Efecto de proximidad. Filtro anti-Pop. Tela colocada entre la boca y el micrófono para evitar las corrientes instantáneas de aire que provocarían offset, al mantener el diafragma empujado la señal entraría en la zona no lineal. Toma de instrumentos. En general poner el micro cerca del punto donde se genera el sonido y/o donde el contenido de armónicos sea más completo. Teniendo en cuenta la intensidad del sonido y el rango dinámico del micrófono intentaremos aprovechar al máximo ese rango (para reducir la relación S/N) pero dejando un buen margen para que no sature en los picos de intensidad. Toma estéreo. Varias formas, con dos micros en el mismo punto: Toma XY: Dos micros cardioides orientados en distinto ángulo. Stereosonic: Dos micros bidireccionales orientados en distinto ángulo. Toma Middle-Side: Un micro cardioide al frente y otro bidireccional perpendicularmente. La suma M+S enfoca un ángulo hacia un lado, y la M-S hacia el otro lado. O con micrófonos separados. Micrófono de esfera. Se simula el efecto acústico (difracción,...) de la cabeza con una esfera y se ponen los micrófonos donde estarían las orejas. Se usa para sistemas Surround Sound con varios canales. Calibración por reciprocidad