Capítulo 2 Cuarta parte
Anuncio

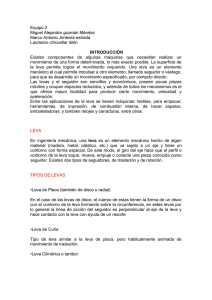
Versión 2014 CAPITULO 2 MECANISMOS División 4 Levas: Descripción y cálculo Mecanismos desmodrómicos UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan Versión 2014 1. Introducción En esta división del capítulo de mecanismos se presentarán algunos tipos de levas y su funcionamiento. Se describirán las denominadas levas desmodrómicas y su utilización en la industria. Esta parte de la asignatura se considerará como extensión y/o complementación de los contenidos de levas ya vistos en la asignatura Integradora del segundo nivel. 2. Descripción de mecanismos de Levas Una leva es un elemento mecánico que se emplea para impulsar, mediante contacto puntual o lineal o superficial, otro elemento mecánico denominado palpador (llamado también botador o seguidor) con la finalidad de lograr un movimiento con ley o recorrido predefinido. La estructura básica de un mecanismo de levas puede observarse en la Figura 2.38. El mecanismo leva-seguidor consiste de dos partes que están en movimiento relativo una respecto a la otra por medio de un punto de contacto que formando una semi-junta o bien un par inferior (ver definiciones en la División 1 del Capítulo 2). En este sentido el sistema posee un solo grado de libertad vinculado a la rotación (o en términos generales al movimiento) de la leva. La ley que relaciona el seguidor con la leva se denomina ley de desplazamiento del seguidor. Figura 2.38. Esquema de un sistema leva-seguidor. Los mecanismos de leva-seguidor son usualmente empleados como generadores de funciones, es decir que generen una traza de desplazamiento definida. Suelen ser mecanismos sencillos y no muy costosos en términos generales, pues poseen pocas piezas eslabonadas y no requieren mucho espacio para su funcionamiento. Las máquinas que requieren este tipo de mecanismo suelen ser para aplicaciones textiles o para generar perfiles o para máquinas automáticas con control computarizado y las familiares aplicaciones en motores para garantizar la apertura y cierre de válvulas entre otras aplicaciones. Los mecanismos de leva-seguidor se pueden clasificar de acuerdo a los siguientes criterios: Según la geometría de la leva. Según la geometría de contacto del seguidor. Según el tipo de movimiento del seguidor. Según el tipo de cierre del par superior. UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan Versión 2014 Clasificación de las levas según su geometría: De acuerdo con el tipo de geometría, las levas se pueden clasificar en: De disco: Es la más común y también llamada leva plana (ver Figura 2.39.a) De cuña (ver Figura 2.39.b) Cilíndrica (ver Figura 2.39.c) Frontal Cilíndrica (ver Figura 2.39.d) Frontal Esférica (ver Figura 2.39.e) (a) (b) (c) (d) (e) Figura 2.39. Ejemplos de Levas según su geometría. En la Figura 2.39 también se pueden apreciar algunas de las formas típicas que pueden adquirir, según su función, los palpadores o seguidores. Así pues en la Figura 2.39(a) se puede observar el seguidor de cara plana, en la Figura 2.39(b-e) se puede apreciar el tipo de seguidor de rodillo. Existen otros tipos de seguidores de acuerdo con el tipo de respuesta que se desee de una leva. 3. Descripción de mecanismos desmodrómicos Los mecanismos desmodrómicos son aquellos que deben su movimiento al accionar conjugado de una o más levas. Etimológicamente, la palabra desmodrómico proviene del griego “” que significa confinado o restringido y “” que significa de carrera, con lo cual la palabra desmodrómico significaría “de carrera restringida” o “de carrera UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan Versión 2014 confinada”. Históricamente estos mecanismos fueron desarrollados para suplir algunas desventajas observadas en los sistemas de transmisión de movimiento de las válvulas de motores de combustión para competición o bien que requieran altas velocidades. Un ejemplo típico es el de las motos Ducatti. En la Figura 2.40 se pueden observar casos básicos de transmisiones desmodrómicas para válvulas. La Figura 2.40(a) corresponde a un sistema típico, siendo (1) los balancines de apertura de válvulas, (2) los balancines de cierre, (3) el árbol de levas conjugadas, (4) el resorte de cierre en baja velocidad, (5) las válvulas y (6) la carrera confinada. (a) (b) Figura 2.40. Esquema de sistemas desmodrómicos. (a) Caso más común. (b) Ejemplo de levas conjugadas La razón de la irrupción de este tipo de mecanismos en la industria automotor de alta competición (casi con exclusividad en la rama motociclística) se debió a que los movimientos de retorno e impulsión de las válvulas, basados en resortes, generaban pérdidas de potencia (por ende de rendimiento) en los regimenes de alta velocidad, favorecido por que los resortes no cerraban o abrían las válvulas en el momento adecuado. Tal condición de funcionamiento era comúnmente denominada “golpeteo de válvulas” o “rebote de válvulas”. La razón de tal fenómeno está ligada a que en regímenes de alta velocidad, los resortes pueden entrar en un régimen resonante o por un efecto inercial no responden correctamente en el momento preestablecido, para abrir o cerrar una determinada válvula. Por otro lado, en el sistema de transmisión desmodrómico, el árbol de levas es el encargado de accionar los movimientos de apertura y de cierre de la válvula. Así el árbol mediante levas conjugadas que actúan sobre los balancines, primero empuja el vástago de la válvula (movimiento de apertura) y luego tira de mismo hacia arriba (movimiento de cierre). De esta manera los resortes o muelles no son necesarios. En la siguiente Figura 2.40(b) se puede apreciar un ejemplo diferente donde queda demarcado el efecto de las levas conjugadas. Así pues, la leva de color azul (la del frente) es la que conectada al cabezal de la válvula genera la carrera de apertura, en tanto que la leva de color rojo (la del fondo) es la moviliza uno de los brazos del balancín para que el otro brazo ejecute el cierre. Como todos los sistemas mecánicos, estos sistemas poseen ventajas y desventajas. Como ventajas se puede señalar que virtualmente es imposible que se presente el fenómeno UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan Versión 2014 conocido como "flotación o rebote de válvulas" que suele aparecer en los regímenes de altas revoluciones de funcionamiento del motor. Recuérdese que el rebote de válvulas sucede cuando el resorte no puede recuperarse a tiempo del empuje de la leva, siendo golpeado nuevamente por ésta antes de cerrar completamente la válvula sobre su asiento. En ese caso, la válvula permanece flotando y no llega a cerrarse, por lo que el motor pierde su rendimiento. De no haber una recuperación bajando las revoluciones del motor, se corre el riesgo de doblar los vástagos de las válvulas o romperlas cuando impactan con la cabeza del pistón. Otra ventaja de este sistema de distribución es la disminución del trabajo del motor en la apertura de las válvulas, puesto que no tiene que vencer el muelle para abrir la válvula. Con ello se consigue un aumento de potencia del motor. La principal desventaja reside en la complejidad geométrica de su construcción y en su consecuente montaje y puesta a punto. Existen otros mecanismos desmodrómicos como los de la Figura 2.41 que suelen ser empleados como generadores de funciones para posicionamiento longitudinal o angular [7]. Los mecanismos de la Figura 2.41 suelen emplearse en máquinas de la industria textil entre otras. (a) (b) Figura 2.41. Mecanismos desmodrómicos. (a) Movimiento longitudinal. (b) Movimiento angular En términos más generales, un mecanismo desmodrómico puede definirse como aquel mecanismo accionado por levas que utiliza dos pares superiores conjugados (o de cierre geométrico) de manera que ambos imponen la misma restricción cinemática garantizando la bilateralidad global, entendiendo por esto que la perdida de contacto de uno de los pares queda impedido por el accionar del otro [7]. 4. Diseño de leva-palpador para levas de disco La función de una leva es la de impulsar el palpador o seguidor de acuerdo con cierta ley de variación. Para ello la estrategia de diseño de un mecanismo leva-palpador, en lo que se refiere a aspectos cinemáticos y geométricos, transita los siguientes pasos: Diseño de la ley de desplazamientos Obtención del perfil de la leva siguiendo la ley de desplazamientos UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan Versión 2014 Comprobación de condiciones funcionamiento correcto: ausencia de autobloqueo, discontinuidades, etc. Para poder diseñar una ley de desplazamiento se debe tener en claro el tipo de respuesta pretendida. Es evidente que al observar la Figura 2.39 se tienen diferentes formas de ejecutar una acción en la leva para obtener una determinada respuesta. Para entrar en concepto se empleará la leva rotante que genera un movimiento lineal en el palpador. En la Figura 2.42 se muestran dos tipos de posibles leyes de desplazamiento. La Figura 2.42(a) muestra una ley donde están definidos un descanso con valor nulo en el dominio [0,0] y un valor máximo en 1, debiéndose obtener la función en los dominios [ 0,1] y [1,2]. Por otro lado la Figura 2.42(b) muestra una ley con un descanso nulo en el dominio [0,0] y un descanso con valor máximo en el dominio [1,2], debiéndose obtener la función en los dominios [0,1] y [2,2]. Figura 2.42. Posibles leyes de desplazamiento para un mecanismo leva-palpador. En la Figura 2.42(b) se pueden distinguir cuatro zonas bien diferenciadas que componen la ley de desplazamiento y que toman los siguientes nombres: Detenimiento (D) bajo en [0,0] Ascenso o subida (S) en [0,1] Detenimiento (D) alto en [1,2] Descenso o bajada (B) en [2,2] Existen diferentes alternativas para poder obtener las leyes de desplazamiento correspondiente a las líneas de trazos de la Figura 2.42. Sin embargo sea cual fuere la ley de desplazamiento UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan Versión 2014 que se adopte en una leva, se debe cumplir la siguiente “Ley fundamental de diseño de levas”: “Para que una función f() sea considerable como función de desplazamiento de una leva, se debe cumplir que f() sea de clase C(3)” Esto quiere decir que se la función f() debe ser continua y finita hasta la tercera derivada inclusive. Con esto se evita que existan discontinuidades en las funciones del desplazamiento, en la velocidad y en la aceleración del componente palpador. Un ejemplo típico de funciones C(3) viene dado por las funciones trigonométricas correspondientes a un movimiento armónico simple. Así pues en la expresión (2.78) se puede observar un ejemplo de tal clase de funciones y sus derivadas. h 1 Cosk 2 ds h kSink d 2 d 2s h 2 k Cosk d 2 2 d 3s h k 3 Sink 3 d 2 s (2.78) Ahora bien para poder definir la función de desplazamiento por ejemplo en el segmento de “ascenso”, se pueden emplear diferentes representaciones entre las que se encuentran los siguientes grupos: Funciones trigonométricas Funciones cicloidales Funciones polinómicas Cada uno de los grupos permite elaborar diferentes alternativas para una alzada o cota máxima definida. Las funciones polinómicas permiten un primer enfoque con una estructura algebraicamente sencilla y fácilmente comprensible. 4.1. Diseño de una leva plana rotante de perfil polinómico 345 Supóngase que se desea emplear una función polinómica para describir el segmento de “ascenso” en el dominio [0,1] empleado el siguiente patrón funcional: s M a n n n 0 UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan (2.79) Versión 2014 Donde las an son constantes y M puede ser un entero con un valor dado. En muchos casos suele ser M=5 por las razones que se verán a continuación. El caso no pierde generalidad si el dominio [0,1] = [0,]. Para tener definida la función de desplazamiento entre los puntos extremos y , se debe conocer los valores de la posición, la velocidad y la aceleración en tales puntos como condiciones de borde. Así pues se debería contar con la siguiente información: ds0 d 2 s0 v0 a0 dt dt 2 (2.80) ds d 2 s s s v a dt dt 2 Para poder emplear y caracterizar un polinomio como el (2.79) con las condiciones (2.80) se debe cumplir que M = 5, es decir: s0 s0 s a0 a1 a2 2 a3 3 a4 4 a5 5 (2.81) Entonces las (2.81) conformarán un conjunto de seis ecuaciones con las seis incógnitas an, n=0,…,5. Esto se debe hacer en algún entorno de matemática simbólica (Mathematica o Maple) para facilitar el aspecto algebraico. Ejemplo: Si en el ángulo son nulos los valores de la función de desplazamiento, la velocidad y la aceleración y si en el ángulo la posición tiene el valor , en tanto que la velocidad y la aceleración son nulas. Sabiendo que la velocidad de rotación de la leva es constante demuestre que la ley de desplazamiento polinómico es: s 10 3 3 15 4 4 6 5 5 (2.82) Se puede observar que la expresión (2.82) tiene términos de 3°, de 4° y de 5° orden, de allí su nombre a tipo polinómico 345. 4.2. Criterio de diseño del perfil de leva polinómico 4567 En ejemplo del apartado anterior se vio que el polinomio del perfil de la leva correspondía a uno de tres términos con grados 3, 4 y 5; de allí su denominación 345. En tal caso se permitió como máximo la continuidad en la 2ª derivada temporal de la función de alzada. Esto es, se permitió como máximo la continuidad en la aceleración. Si por el contrario se deseara tener continuidad C(3), que hasta la 3ª derivada de la función de desplazamiento es continua, lo que implica que la contra-aceleración o impulsión también es continua. De manera que para poder definir la curva polinómica con esta exigencia es debe verificar en el dominio [ 0,1] = [0,] las siguientes condiciones: UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan Versión 2014 ds0 d 2 s0 d 3 s0 s0 s0 v0 a0 j0 dt dt 2 dt 3 ds d 2 s d 3 s s s v a j dt dt 2 dt 3 Lo que implica que la debe cumplir que M = 7, es decir: s a0 a1 a2 2 a3 3 a4 4 a5 5 a6 6 a7 7 (2.83) (2.84) En consecuencia el perfil de la leva se llama polinómico 4567. Ejemplo: Si en el ángulo son nulos los valores de la función de desplazamiento, la velocidad, la aceleración y la impulsión, mientras que en el ángulo la posición tiene el valor , en tanto que el resto de entidades cinemáticas son nulas. Sabiendo que la velocidad de rotación de la leva es constante demuestre que la ley de desplazamiento polinómico es: s 35 4 4 84 5 5 70 6 6 20 7 7 (2.85) Para mayores detalles de obtención de funciones de desplazamiento para aplicaciones específicas se sugiere recurrir a la bibliografía especializada, específicamente el manual de diseño de levas de McGraw-Hill [6] y a las referencias [1], [3] y [7]. 5. Bibliografía [1] R.L. Norton, “Diseño de Maquinaria”, 2ª Ed., McGraw Hill, Mexico, 2000. [2] J.E. Shigley. “The standard handbook of machine design”. McGraw-Hill, 2004. [3] A.G. Erdman y G.N Sandor, “Diseño de mecanismos. Análisis y síntesis”. 3ª Ed. McGraw-Hill, Mexico, 1998. [4] SAM 6.1, http://www.artas.com [5] Working Model V3.0. http://www.krev.com [6] Harold A. Rothbart, “CAM DESIGN HANDBOOK”. Digital Engineering Library McGraw-Hill. McGraw-Hill Company, 2004. [7] E.E. Zayas Figueras, “Aportación al estudio de levas desmodrómicas”. Tesis Doctoral, Departamento de Ingeniería Mecánica, Universidad Politécnica de Cataluña, 2001. 6. Problemas Resueltos y para Completar En esta sección se ofrecen algunos problemas resueltos completamente (y otros que el alumno debe completar) para adquirir fluencia en la resolución de los Trabajos Prácticos correspondientes. Problema tipo 2.4: Se pretende diseñar una leva con perfil 345 tanto en el segmento de ascenso como en el de descenso. La leva tiene un diámetro base de D = 2R = 10 cm con una alzada máxima de =2 cm que se mantiene por el transcurso de 45º. Los segmentos están definidos por: UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan Versión 2014 a) De 0º a 15º no hay avance. b) De 15º a 60º se produce el movimiento de ascenso. c) De 60º a 105º se mantiene en el máximo de alzada. d) De 105º a 150º se produce el movimiento de descenso. e) De 150º a 360º no hay avance. Tanto para el inicio y fin del movimiento de ascenso cuanto para el movimiento de descenso se cumple que las velocidades y las aceleraciones son nulas y que la leva gira a velocidad constante rad/seg. Llamaremos S() a la función de avance de la leva en todo el dominio angular, el cual es un giro completo o 2. Entonces en los puntos a) y e) tenemos que el avance de la leva será constante con un valor de S()=D/2=R=5 cm. Una cosa similar ocurre en el segmento c) pero con S()=R+=6 cm. Para los segmentos b) y d) hay que hallar las constantes de la ecuación (2.81) haciendo cumplir condiciones como las de la ecuación (2.80) adaptadas a las condiciones del problema. Esta tarea se deja para que la haga el alumno empleando el programa Mathematica o bien Wolfram Alfa (en celular). Así pues el perfil de la leva por segmentos viene dado por: 5 0, 112 2 3 4 5 94 1280 6400 14080 12800 12288 112 , 13 2 3 4 5 81 27 9 3 7 13 , 712 S 2 3 4 5 183.04 43.52 12.288 3 160 392 380.8 712 , 56 10 81 27 9 2 3 3 4 5 5 56 ,2 Puede emplear el programa Mathematica y específicamente el comando Which[] para definir la función S() y verifique las funciones expuestas a continuación: 12.0 5 11.5 11.0 1 2 3 4 5 10.5 5 1 2 3 4 5 6 (alzada) (velocidad) 15 10 10 5 5 1 2 3 4 5 6 10 5 5 5 10 5 15 10 (aceleración) (perfil de leva) Figura 2.PTN4. Características de la leva 345. UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan 10 6 Versión 2014 7. Problemas Propuestos En todos los problemas analíticos propuestos a continuación se sugiere al alumno emplear los programas de simulación de movimiento junto con el estudio detallado del álgebra que puede ser asistido mediante programas como Mathematica, Maple o Matlab. Problema 1: Rehaga el Problema tipo 2.4 con todos los datos idénticos pero empleando un criterio de leva polinómica 4567, teniendo en cuenta que para el inicio y fin del movimiento de ascenso cuanto para el movimiento de descenso se cumple adicionalmente que la tercera derivada de la función de la leva es nula (es decir la contra-aceleración). Luego compare el perfil de la leva, los gráficos de alzada, velocidad y aceleración con los obtenidos en el problema tipo 2.4. UTN-FRBB Cátedra: Elementos de Máquinas. Profesor: Dr. Ing. Marcelo Tulio Piovan