Arquitecturas y programación de procesadores gráficos
Anuncio

Arquitecturas y programación de
procesadores gráficos
Nicolás Guil Mata
Dpto. de Arquitectura de
Computadores
Universidad de Málaga
Indice
Arquitectura de las GPUs
z
z
Arquitectura unificada
Nvidia: GT200
Diagrama de bloques
Memoria
ALU
Planificación de threads
CUDA
z
z
z
z
Jerarquía de threads
Acceso a memoria global
Control de flujo
Herramientas para depurado y profiling
Un ejemplo: multiplicación de matrices
Nicolás Guil Mata
Computación en GPUs
Rendimiento pico
1000
800
600
GFlops
400
200
0
Intel Core 2 Extreme
z
z
ATI Radeon HD 4800
Nvidia GTX 280
Gran número de unidades funcionales
Capaces de ejecutar miles de threads de forma concurrente
Ocultan latencias de acceso a memoria y riesgos
z
Adecuado para kernels de computación (SPMD)
Acelerador gráfico y propósito general
z
Jerarquía de memoria para soportar altos rendimientos
Nicolás Guil Mata
Programación de GPUs
Hardware de propósito específico para
procesamiento gráfico
vertex program
z
Rasterización, ROP
Programación de la operaciones sobre
vértices y píxeles
geometry
program
z
z
z
GLSL (3DLabs y OPenGL), Cg (Nvidia),
HLSL (Microsoft)
CUDA (NVidia)
Sh (RapidMind), Brooks (Stanford)
rasterizer
fragment
program
texture
unit
output merger
(ROP)
Nicolás Guil Mata
Evolución de las GPUs
Arquitectura unificada
ATI R520 (2005)
ATI R600 (2007)
Nicolás Guil Mata
Evolución de las GPUs
Nvidia G70
(2005)
Nvidia G80
(2006)
Nicolás Guil Mata
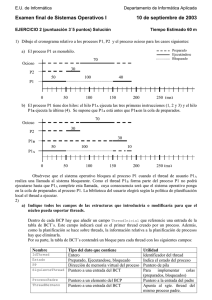
Arquitectura G80/G90/GT200
Streaming
Processor Array
(SPA)
Streaming
multiprocessor
(SM)
Texture Processor
Cluster
(TPC)
Instruction L1
TPC
TPC
Instruction Fetch/Dispatch
Data L1
SM
SM
Register file
Shared memory
TPC
SP
SP
SP
SP
SFU
Texture units
TPC
Texture L1
SFU
SP
SP
SP
SP
Nicolás Guil Mata
Arquitectura G80
Número variable de TPCs y SMs/TPC en las implementaciones de la arquitectura
Memoria de textura de los TPCs para aplicaciones gráficas
Planificación y ejecución de instrucciones en SM
z
Número máximo de threads asignados a un SM: 768
Memoria cache de datos constantes
8192 registros (32 bits) partionados entre los threads asignados
16 KB de memoria local (más pequeña que el banco de registros)
z
Particionamiento explícito de la memoria local entre los bloques asignados a un SM
La memoria global es particionada entre los bloques asignados a cada SM y cada bloque sólo
accede a su partición
Nicolás Guil Mata
Bloques de threads
Max.
8
bloques
Bn
·
B1
·
·
····
······
· · · ·· · · ·
······
····
Max. 768 threads
Instruction L1
Instruction Fetch/Dispatch
Asignación
a SM
Data L1
Register file
Shared memory
SP
SP
SP
SP
SFU
SFU
SP
SP
SP
SP
A un SM se pueden asignar, como máximo, 768 threads.
Los threads son asignados a los SMs en grupos llamados
bloques (máximo 8 bloques por SM)
z
El bloque es la unidad de asignación de threads
Primitivas de sincronización (barrier) para todos los threads de un
bloque
Todos los threads de un bloque pueden intercambiar información a
través de la memoria compartida
z
Cada bloque puede contener 512 threads
Nicolás Guil Mata
Planificación de threads
Warp j (32 threads)
Instrucción x de warp j
Bi
····
······
····
Instruction Fetch/Dispatch
Data L1
Register file
Shared memory
SP
SP
SP
SP
SFU
SFU
SP
SP
SP
SP
SIMT (Single Instruction Multiple Thread): Cada instrucción del
programa es ejecutada por 32 threads (warp) consecutivos del bloque
z
z
El warp es la unidad de planificación
Uso de round-robing/aging para seleccionar próximo warp a planificar de los
disponibles en el pool de warps listos (operandos leidos)
Ya que hay 8 SPs por SM, se tardan cuatro ciclos en ejecutar una
instrucción de un warp.
Nicolás Guil Mata
Cambios de contexto
SM
Warp 5
Inst. 10
Warp 23
Inst. 17
Warp 5
Inst. 11
Warp 12 Warp 12 Warp 11 Warp 15
Inst. 3
Inst. 4
Inst. 8
Inst. 1
ciclos
Cambio de contexto sin coste en ciclos
z
probablemente ocultado por la latencia de ejecución de un
warp
La selección del próximo warp a ejecutar se basa en
análisis de dependencias de instrucciones
z
Uso de la técnica del marcador (scoreboarding) para evitar
riesgos
Nicolás Guil Mata
Jerarquía de thread
Grid:
Grid
z
Bloque
(0,0)
Bloque
(1,0)
Bloque
(2,0)
Bloque
(0,1)
Bloque
(1,1)
Bloque
(2,1)
Explicitar número de bloques en
el grid
Bloque:
z
Bloque
Un bloque está compuesto de
threads
Explicitar número de threads del
bloque
Thread Thread Thread Thread
(0,0)
(1,0)
(2,0)
(3,0)
z
Thread Thread Thread Thread
(0,1)
(1,1)
(2,1)
(3,1)
z
Thread Thread Thread Thread
(0,2)
(1,2)
(2,2)
(3,2)
Cada kernel de ejecución del
programa se mapea en un grid
Threads pueden cooperar
compartiendo datos de la shared
memory
Threads pueden sincronizarse
(barrier)
Warp:
z
z
Grupo de 32 threads
consecutivos de un bloque
Tamaño de warp implícito
Nicolás Guil Mata
Memoria on chip
Cada SM tiene
z
Instruction L1
Instruction L1
Instruction Fetch/Dispatch
Instruction Fetch/Dispatch
Data L1
Data L1
Register file
Shared memo ry
Register file
Shared memory
SP
SP
SP
SP
SP
SP
SP
SP
SFU
z
SFU
SFU
SFU
SP
SP
SP
SP
SP
SP
SP
SP
TP
TP
TP
TP
TP
TP
8192 registros de 32 bits
4 operandos por ciclo
Manejo explícito (como cache
de datos)
16 Kbytes
No se garantiza compartición de
datos entre threads de distintos
bloques
Memoria compartida que
permite intercambio de datos
entre threads ejecutándose en
el mismo SM
z
TP
Fichero de registros
particionado entre los threads
asignados (R/W)
TP
Cache de datos constante (R)
Constantes leidas de la
memoria constante
Contenido de la cache es leido
simultáneamente por los 8 SPs
− Primer acceso lento
Texture cache
z
Cache de texturas
Nicolás Guil Mata
Entrelazado de la SM
16 bancos de memoria
z
Entrelazado de orden inferior con
palabra de 32 bits
Acceso simultáneo de los threads
de medio warp a memoria
z
z
Sin conflictos siempre que los
threads accedan a módulos
diferentes (cualquier permutación)
Si todos los threads acceden a la
misma palabra de un banco
específico
Nicolás Guil Mata
Unidades funcionales por SM
8 unidades funcionales segmentadas para
operaciones de suma/multiplicación flotante
(32 bits) y entera
2 super unidades funcionales segmentadas
para operaciones flotantes complejas
Instruction L1
Instruction Fetch/Dispatch
Data L1
Register file
z
Rendimiento pico en SM
z
SP
z
SP
SP
SFU
SFU
SP
SP
SP
SP
G80
Shared memory
SP
Trigonométricas, inversa de raíz cuadrada, …
18 operaciones flotantes por ciclo (8 mul/add
flotante y 2 operaciones complejas)
En caso de 16 SM (1.35GHz)->388.8 GFlops
− 388.8 = 16 x 18 x 1.35
GT200
24 OPF por ciclo (1mul/add y 1 mul por SM)
30 SM (1.35 Ghz) -> 972 GFlops
Nicolás Guil Mata
Memoria off-chip
TPC
TPC
TPC
TPC
TPC
Accessible a todos los
SMs (threads) y al host
z
z
Global memory
Off-chip
z
Constant memory
Texture memory
I/O
Contenidos son
mantenidos entre
ejecuciones de distintos
grids
z
Arquitectura
propósito
general
Host
Memoria global (R/W)
Memoria constante (R)
Memoria de textura
(R/W)
Intercambio de
información entre
threads de grids
diferentes
Nicolás Guil Mata
Coalescing en memoria global
Instrucciones pueden leer/escribir palabras de 32, 64 o 128 bits
Medio warp puede acceder de forma unificada (coalesced) para
leer 32, 64 o 128 bytes a segmentos de memoria global
z
Segmento: Trozo contínuo de memoria de 32 , 64 o 128 bytes,
alineado a estos tamaños
K mod 32
K mod 64
K mod 128
32 bytes
64 bytes
128 bytes
MG
MG
MG
Nicolás Guil Mata
Acceso a la memoria global
Condiciones de coalescing de threads con Computing Capability 1.0 y 1.1
z
z
z
Acceso a palabras de 32 bits (1 acceso de 64 bytes), de 64 bits (1 acceso de 128
bytes) o de 128 bits (2 accesos de 128 bytes)
Las 16 palabras deben estar ubicadas en un segmento de memoria de igual tamaño al
de la transacción (o del doble en el caso de 128 bits)
Los threads deben acceder a las palabras en secuencia (k-ésimo thread a la k-ésima
palabra)
Si las condiciones no se cumplen se requiere un acceso independiente para
cada thread
Coalesced
No-coalesced
Nicolás Guil Mata
Acceso a la memoria global
Condiciones de coalescing para
Computing Capability 1.2 o mayor
z
z
z
Palabras accedidas por lo threads
están ubicada en un segmento de
memoria de 32 bytes (palabras de 8
bits), 64 bytes (16 bits), 128 bytes
(32 o 64 bits)
El patrón de acceso puede ser
cualquiera e incluso varios threads
pueden acceder a la misma palabra
Si el medio warp accede a n
segmentos, el número de accesos
será n
Nicolás Guil Mata
¿ Qué es CUDA ?
CUDA ejecuta sobre un device físico separado que opera como
coprocesador de un host
z
z
Extensión de C
Biblioteca de runtime con tres tipos de componentes:
Host: control y acceso a los devices
Device: funciones específicas de los devices
Comunes: tipos para vectores y un bibliotecas soportadas por el host y el device
CPU
Memoria
principal
HOST
I/O
GPU
Memoria
global
DEVICE
Nicolás Guil Mata
Jerarquía de thread
Grid:
Grid
z
Bloque
(0,0)
Bloque
(1,0)
Bloque
(2,0)
Bloque
(0,1)
Bloque
(1,1)
Bloque
(2,1)
Explicitar número de bloques en
el grid
Bloque:
z
Bloque
Un bloque está compuesto de
threads
Explicitar número de threads del
bloque
Thread Thread Thread Thread
(0,0)
(1,0)
(2,0)
(3,0)
z
Thread Thread Thread Thread
(0,1)
(1,1)
(2,1)
(3,1)
z
Thread Thread Thread Thread
(0,2)
(1,2)
(2,2)
(3,2)
Cada kernel de ejecución del
programa se mapea en un grid
Threads pueden cooperar
compartiendo datos de la shared
memory
Threads pueden sincronizarse
(barrier)
Warp:
z
z
Grupo de 32 threads
consecutivos de un bloque
Tamaño de warp implícito
Nicolás Guil Mata
Modelo de programación
Extiende lenguaje C con un nuevo tipo de función de tipo kernel
z
Código de esta función es ejecutado en paralelo por múltiples
threads en un device (GPU)
Ejecución
__global__ kernelA(){···}
__global__ kernelB(){···}
int main()
···
kernelA <<<dimGridA, dimBlockA>>>;
···
kernelB <<<dimGridB, dimBlockB>>>
···
CPU
GPU
CPU
GPU
CPU
Nicolás Guil Mata
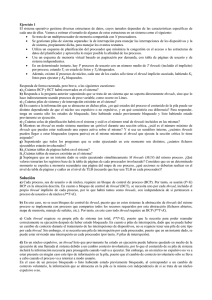
Identificación de threads
Bloque
z
N=16
BlockIdx (built-in): vector (1D, 2D o 3D) que
identifica el bloque dentro del grid.
Thread
z
ThreadIdx(built-in): vector (1D, 2D o 3D) que
identifica el thread dentro del bloque
__global__ void matAdd (float A[N][N], float B[N][N],
float C[N][N])
{
int i = blockIdx.x * blockDim.x + threadIdx.x;
int j = blockIdx.y * blockDim.y + threadIdx.y;
C[i][j]=A[i][j]+B[i][j]
{
int main(){
dim3 dimBlock(4,4);
dim3 dimGrid (N/ dimBlock.x, N/ dimBlock.y);
matAdd<<<dimGrid, dimBlock)>>>(A, B, C);
Matriz A
blockIDX=(3,2)
threadIdx=(3,3)
BlockDim.x
blockDim.y
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
····
Grid
}
Nicolás Guil Mata
Acceso a memoria
Memoria
local
Thread
Bloque
On-chip
Memoria
compartida
···
···
···
···
···
···
···
Grid 0
Memoria Memoria
global constante
Grid 1
···
···
···
···
···
···
···
···
···
(R/W)
(R)
Memoria
textura
Off-chip
(R)
Nicolás Guil Mata
Control de flujo
Cada SM ejecuta los 32 threads de un warp (SPMD)
z
Todos los threads ejecutan la misma instrucción
Si bifurcaciones afectan de forma diferente a los
threads de un warp (divergencia), se secuencializa la
ejecución de los threads del warp
z
Pérdida de rendimiento
if (ThreadIdx.x > 2)
if (ThreadIdx / WARP_SIZE >2)
{
{
}
}
Divergencia
Sin Divergencia
Nicolás Guil Mata
Instrucciones predicadas
Transformar la dependencia de control en una de
datos
z
En el caso de la GPU evitamos el problema de la divergencia
Idea interesante si hay pocas instrucciones en el ifelse
ld r5, X
if (x == 10)
c=c+1;
P1 <- r5 eq 10
P1:
ld r1, c
P1:
add r1, r1, 1
P1:
st r1, c
Nicolás Guil Mata
Predicados en CUDA
La instrucciones predicadas permiten la escritura si la condición
se cumple
z
Se evitan los accesos a memoria (loads y stores) de instrucciones
que no cumplen condición
El compilador analiza el posible grado de divergencia de warps
z
z
Si deduce que no hay divergencia sólo aplica predicados si hay
menos de 4 instrucciones
Si no hay garantías predica con menos de 7 instrucciones
Nicolás Guil Mata
Coalescencing en 1-D arrays
Acceso a arrays de estructuras
z
Si tamaño estructura mayor de 16 bytes, crear varios arrays de
estructuras de este tamaño como máximo
struct{
float var1;
float var2;
· · ·
float var8;
} big;
struct big[10000];
struct{
float var1;
· · ·
float var4;
} half1;
struct{
float var5;
· · ·
float var8;
} half2
struct half1[10000];
struct half2[10000];
Nicolás Guil Mata
Coalescencing en arrays 2-D
En arrays de estructura 2-D con acceso a elementos
cotigüos de la fila:
z
Ancho de la fila debe ser múltiplo de 16 (por alineamiento)
float array[2][16]
0
1
2
3
4
5
6
7
8
9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63
Segmentos
Nicolás Guil Mata
Reducción sin conflictos en SM
Acceso de cada thread activo a módulos diferentes en el mismo ciclo
float A[64];
load r1, A[tid];
load r2, A[tid+32];
add r2,r2,r1
store r2, B[tid];
0 1 2 3 4 5 6 7 8 9
16 17 18 19 20 21 22 23 24 25
32 33 34 35 36 37 38 39 40 41
48 49 50 51 52 53 54 55 56 57
10
26
42
58
11
27
43
59
12
28
44
60
13
29
45
61
14
30
46
62
15
31
47
63
// Sólo si tid <8
load r1, B[tid];
load r2, B[tid+8];
add r2,r2,r1
store r2, B[tid];
0
1
2
3
4
5
6
7
8
9 10 11 12 13 14 15
// Sólo si tid <16
load r1, B[tid];
load r2, B[tid+16];
add r2,r2,r1
store r2, B[tid];
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
// Sólo si tid <4
load r1, B[tid];
load r2, B[tid+4];
add r2,r2,r1
store r2, B[tid];
0
1
2
3
4
5
6
7
Nicolás Guil Mata
Reducción y divergencia
Divergencia presente cuando stride<=16
z
Sólo threads con tid < 16, 8, 4, y 2 computan
__shared__ float partialSum();
unsigned int t= threadIdx.x;
for (unsigned int stride = blockDim.x;
stride >1; stride >>1)
{
__syncthreads();
if (t < stride)
partialSum[t] += partialSum[t+stride];
}
z
No hay
conflictos en
acceso a la SM
Nicolás Guil Mata
Compilando con NVcc
NVcc genera dos tipos de
código:
z
z
Host: donde finalmente se
usará un compilador de la
CPU para generar el código
final
Device: código PTX que
incluye los kernel y funciones
llamadas por ellos
Los dos códigos serán
enlazados (binded) por el
runtime
z
Comunicaciones entre estos
códigos será realizada por el
driver y la biblioteca de
transferencia
Nicolás Guil Mata
PTX (Parallel thread execution)
Código para máquina virtual
NVCC
z
Código para el
device
z
Código PTX
Basado en ISA
Expone todos los recursos
computacionales
Traductor
Traductor
C
···
z
Replanifica y optimiza
ligeramente el código en función
de la arquitectura real durante el
runtime
G80
Nicolás Guil Mata
Ejemplo
Multiplicación de matrices
Nicolás Guil Mata
Arquitectura G80
388.8 GFlops
GRID
SM0
··········
SM15
16 KB shared memory
32 KB register file
8 KB constant c.
z
Memoria global:
z
SP0 · · · · · · · · · · · · · · SP7
SFU0
16 SMs * 18 FLOPS/SM *
1.35 GHz
z
364 bits
84.6 GB/s
SFU1
756 MB global memory
Nicolás Guil Mata
Organización del computo
Recomendable crear gran cantidad de threads para ocultar latencias
con la memoria (evitando sincronizaciones)
z
z
Usar un sólo grid con tantos threads como elementos haya en la matriz C
Cada thread se encargará de realizar el cómputo de un elemento de la
matriz C
Grid
· · · · Bloque
······ ·······
····
····
······
····
···············
· · · · Th(x,y)
······ ·······
····
····
······
····
WidthA
WidthB
HeightA
C(x, y)
C
=
HeightA
WidthB
X
A
B
dim3 dimBlock(BLOCK_SIZE, BLOCK_SIZE);
dim3 dimGrid(WidthB/BLOCKSIZE,
HeightA/BLOCKSIZE);
Nicolás Guil Mata
Versión simple
GRID
SM0
··········
SM15
16KB shared memory
32 KB register file
8 KB constant c.
SP0 · · · · · · · · · · · · · · SP7
SFU0
Ctemp=0;
for (i=0; i<widthA; i++){
Ctemp += A[indexA] * B[indexB];
indexA++;
indexB += width
}
C[indexC] = Ctemp ;
Coalescing en acceso a matriz B
SFU1
10 registros por thread ->768
threads: SM agrupados en tres
bloques de 256
Rendimiento: 10.58 GFLOPS
A
B
Memoria global
Cuello de botella (mirar PTX) ->
acceso a memoria global
Nicolás Guil Mata
Tiling en memoria compartida
Cada thread carga un elemento de a y b del tile
GRID
··········
SM0
SM15
As Bs
····
····
····
····
····
····
32 KB reg. file
Shared Memory
8 KB constant c.
SP0 · · · · · · · · · · · · · · SP7
SFU0
Ctemp=0;
for (···){
__shared__ float As[16][16];
__shared__ float Bs[16][16];
SFU1
····
····
····
····
····
····
// Load tile (16x16)
As[ty][tx] = A[indexA];
Bs[ty][tx] = B[indexB];
indexA += 16;
indexB += 16 * widthB;
__syncthreads();
// Compute results from tile
for (i=0; i<16; i++)
Ctemp+=As[ty][i]*Bs[i][tx];
__syncthreads();
}
C[indexC] = Ctemp ;
A
B
Memoria global
Nicolás Guil Mata
Desenrrolle
Optimización automática del compilador
Ctemp=0;
for (···){
__shared__ float As[16][16];
__shared__ float Bs[16][16];
// Load tile (16x16)
As[ty][tx] = A[indexA];
Bs[ty][tx] = B[indexB];
indexA += 16;
indexB += 16 * widthB;
__syncthreads();
// Compute results from tile
Ctemp+=As[ty][0]*Bs[0][tx];
····
Ctemp+=As[ty][15]*Bs[15][tx];
__syncthreads();
}
C[indexC] = Ctemp ;
Nicolás Guil Mata
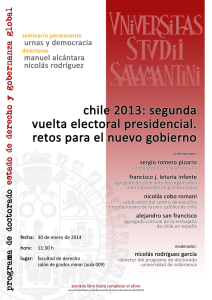
Tamaño del tile
Rendimiento
100
90
80
70
60
GFlops 50
40
30
20
10
0
tiled only
tiled & unrolled
4x4
8x8
12x12
16x16
Nicolás Guil Mata
Conclusiones
GPU puede ser usada como dispositivo acelerador de
código basado en kernels
z
z
Eficiencia basada en la ejecución concurrente de miles de
threads
Gran número de unidades funcionales
Optimización de código compleja
z
z
z
Optimizar accesos a memoria global
Gestión explícita de la memoria compartida
Ajuste fino de tamaño de bloque
Aspectos no visibles
z
Asignación y planificación de threads
Nicolás Guil Mata