Series de Tiempo Estacionarias (Univariadas)
Anuncio
")
Econometrı́a de series de tiempo aplicada a
macroeconomı́a y finanzas
Series de Tiempo Estacionarias (Univariadas)
Carlos Capistrán Carmona
ITAM
Serie de tiempo
Una serie de tiempo es una sequencia de valores usualmente
registrados en intervalos de tiempo equidistantes.
xt
t = 1, 2, ..., T.
Ejemplos:
I
I
I
I
I
Número de nacimientos por año en México.
Producción semanal de autos en VW México.
Precios diarios del cierre de alguna acción (e.g., TELMEX).
Producción industrial mensual en México.
Inflación mensual en México.
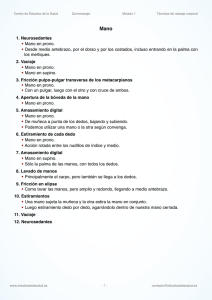
Serie de tiempo
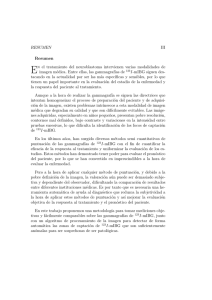
Ejemplo: Inflación anual en México 1925-2010
Inflación Histórica
100
●
●
●
●
●
●
50
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●●
●
●●●
●
●●●●●●●●●●●●●
●
●●
●
●
●
0
Cambio % en Deflactor del PIB
150
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●●●●●●●
●
●
●
●
1940
1960
1980
Años
2000
●
●●
Procesos estocásticos base
Proceso iid (iid)
ε t es un proceso independiente e idénticamente distribuido (iid)
si:
I
ε t , ε s son independientes pero tienen la misma distribución.
Ejemplo: xt = ε t , ε t ∼ N (0, 1), t = 1, ..., 100.
Proceso iid
Ejemplo: xt = ε t ,
ε t ∼ N (0, 1),
t = 1, ..., 100.
3
2.5
2
1.5
1
x
0.5
0
-0.5
-1
-1.5
-2
-2.5
0
20
40
60
80
100
Procesos estocásticos base
Martingala en diferencias (md)
La secuencia M es llamada una martingala si:
E Mt | Mt−j , j = 1, 2, ..., t = Mt−1 .
Una Martingala en diferencias se define como: xt = Mt − Mt−1 .
I
Propiedades:
E x t | Mt − j ,
j≥1
cov (xt , xt−k )
= 0,
= E xt xt−k | Mt−j ,
j ≥ 1 = 0.
Nótese que no es independiente, ya que para eso se necesita:
E (g(ξ t − E [g (ξ t )]) h(ξ t−j ) = 0.
Procesos estocásticos base
Ruido Blanco
ε t es un proceso de ruido blanco si:
I corr ( ε t , ε s ) = 0
∀ t 6= s
I E [ ε t ] es constante para todo t (usualmente 0).
Un proceso de ruido blanco básicamente no tiene estructura
temporal (lineal).
Las principales propiedades de una serie de ruido blanco con
media cero son:
I
I
No hay correlación entre términos
Valores pasados no ayudan a pronosticar valores futuros
Si se utiliza un criterio de mı́nimos cuadrados, se puede mostrar
que el mejor pronóstico de todos los valores futuros de un proceso
de ruido blanco es simplemente la media de la serie.
Nótese que:
ruido
blanco ; Martingala
en
diferencias ; iid.
Estacionariedad y ergodicidad
Primeros dos momentos de una serie de tiempo:
E (xt ) = µt ,
cov(xt , xs ) = λt,s .
¿Cómo se estiman si en cada momento del tiempo sólo tenemos
una realización de cada variable aleatoria?
Inflación Histórica
100
●
●
●
●
●
●
50
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●●
●
●●●
●
●●●●●●●●●●●●●
●
●●
●
●
●
0
Cambio % en Deflactor del PIB
150
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●●●●●●●
●
●
●
●
1940
1960
1980
2000
●
●●
Estacionariedad y ergodicidad
Estacionariedad
Se dice que un proceso estocástico xt es estacionario de segundo
orden (o “estacionario en covarianzas”) si sus primeros dos
momentos no dependen del tiempo:
E [xt ] = µ,
Var [xt ] = σ2 ,
Cov [xt , xt−τ ] = λτ .
Nótese que la covarianzas sólo dependen de la distancia y no del
tiempo.
Se dice que un proceso estocástico xt es estacionario en sentido
estricto si la distribución conjunta de (xt , ..., xt−k ) es independiente
de t para todo k (extremadamente difı́cil de probar).
Estacionariedad y ergodicidad
Ergodicidad
La ergodicidad requiere que valores del proceso suficientemente
separados en el tiempo casi no estén correlacionados.
Una definición, aunque no muy estricta, es: una serie de tiempo
estacionaria es ergódica si cov [xt , xt−τ ] → 0 cuando τ → ∞.
La ergodicidad permite que al promediar una serie en el tiempo,
uno este continuamente añadiendo información nueva y relevante
al promedio.
Desafortunadamente no es posible probar ergodicidad,
simplemente se asume.
Estacionariedad y ergodicidad
Si una serie de tiempo cumple con los supuestos de
estacionariedad y ergodicidad, entonces es posible formar
buenos estimadores de las cantidades de interés promediando a
través del tiempo.
Un estimador consistente de la media es la media muestral:
b=
µ
1
T
T
∑ xt .
t=1
Un estimador consistente de la autocovarianza es la
autocovarianza muestral:
1
b
λτ =
T
T
∑ (xt − µb) (xt−τ − µb) .
t=1
Un estimador consistente de la autocorrelación es la
autocorrelación muestral:
b
λτ
.
ρbτ =
b
λ0
Operadores y filtros
Operador rezago:
Lj xt = xt−j .
Operador diferencia:
∆j xt = 1 − Lj xt = xt − xt−j .
Un filtro cambia las propiedades dinámicas de una serie de
tiempo.
Operadores y filtros
Ejemplos
Ejemplos de filtros:
xt = yt + 3yt−1 + 2yt−2 ,
= (1 + 3L + 2L2 )yt .
xt = yt − yt−1 ,
xt = ( 1 − L ) yt .
Un ejemplo de la aplicación del operador rezago:
xt = axt−1 + ε t ,
(1 − aL)xt = ε t ,
εt
,
(1 − aL)
entonces :
|a| < 1
xt =
si
xt =
∞
∞
j=0
j=0
∑ aj L j ε t = ∑ aj ε t − j .
Modelos Autorregresivos (AR)
AR(p)
Autorregresivo de orden p, AR(p):
p
xt =
∑ φj xt−j + ε t ,
j=1
εt
:
var (ε t ) = σ2
ruido blanco, E [ε t ] = µ,
también puede escribirse como:
φp (L) xt = ε t ,
p
donde φp (L) = 1 − ∑ φj Lj .
j=1
Modelos Autorregresivos (AR)
Condición de estacionariedad
La condición para que un AR(p) sea estacionario es que las raı́ces
de la ecuación caracterı́stica
1 − φ1 z − φ2 z2 − ... ı −φp zp = 0,
estén fuera del cı́rculo unitario (i.e. que el inverso de las raı́ces
estén dentro del cı́rculo unitario, que es lo que usa Eviews).
Lo que esta condición garantiza es que el proceso
φp (L) xt = ε t ,
pueda escribirse como
xt = φp (L)−1 ε t ,
con φp (L)−1 convergiendo a cero, lo que implica que las
autocorrelaciones decaerán conforme aumenta la longitud del
rezago.
Modelos Autorregresivos (AR)
AR(1)
Algunos aspectos importantes de un AR(1):
xt = φxt−1 + ε t
empieza en t = 0,
t
∑ φj ε t−j + x0 φt .
xt =
j=0
asumiendo que x0 = 0, entonces:
i
( h
1 − φ t+1
t
µ
si φ 6= 1
1− φ
E ( xt ) = µ ∑ φ j =
µ (t + 1) si φ = 1
j=0
!2
h
i
t
var (xt ) = E (xt − E (xt ))2 = E ∑ φj ε t−j − µ
j=0
= σ
2
t
∑φ
j=0
(
2j
=
h
1 − φ 2(t+1)
1− φ2
σ2
(t + 1)
σ2
i
si φ 6= 1
si φ = 1
Modelos Autorregresivos (AR)
AR(1)
Un modelo AR(1):
xt = φxt−1 + ε t
es estacionario si |φ| < 1.
¿Porqué?
En este caso, la media y la varianza están dadas por:
E(xt ) =
var(xt ) =
µ
1−φ
σ2
1 − φ2
Modelos Autorregresivos (AR)
AR(1)
La autocovarianza entre xt y xt−1 está dada por:
cov(xt , xt−1 ) = E [(xt − E [xt ]) (xt−1 − E [xt−1 ])]
= E [xt xt−1 ] = E [(φxt−1 + ε t ) xt−1 ]
= φE x2t−1 + E [ε t xt−1 ] = φE x2t−1
= φvar(xt−1 ).
El segundo término desaparece porque xt = ∑tj=0 φj ε t−1−j y por lo
i
h
i
h
−1 j
t−1 j
φ
ε
φ
ε
ε
tanto E ε t ∑tj=
=
E
∑
t t−1−j = 0.
t−1−j
0
j=0
Por lo tanto la autocorrelación está dada por:
ρ1 = corr(xt , xt−1 ) =
cov(xt , xt−1 )
φvar(xt−1 )
=
= φ,
var(xt )
var(xt )
si var(xt ) = var(xt−1 ) que ocurre cuando |φ| < 1.
En general, la función de autocorrelación está dada por:
ρk = corr(xt , xt−k ) = φk .
Modelos Autorregresivos (AR)
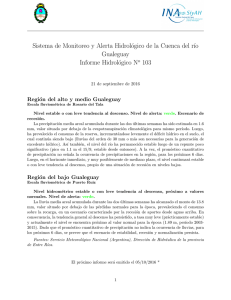
Ejemplo: xt = 0.9xt−1 + ε t , con x0 = 0, ε t ∼ N (0, 1), t = 1, ..., 100.
4
3
2
x; AR(1), phi = 0.9
1
0
-1
-2
-3
-4
-5
0
20
40
60
80
100
Modelos Autorregresivos (AR)
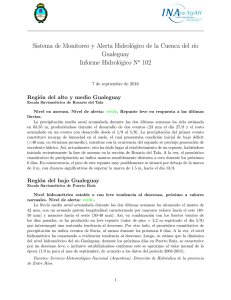
Correlograma y correlograma parcial
ACF for x; AR(1), phi = 0.9
1
+- 1.96/T^0.5
0.5
0
-0.5
-1
0
2
4
6
8
10
12
14
lag
PACF for x; AR(1), phi = 0.9
1
+- 1.96/T^0.5
0.5
0
-0.5
-1
0
2
4
6
8
lag
10
12
14
Promedios Móviles (MA)
MA(q)
Promedio móvil de orden q, MA(q):
q
xt =
∑ θ j ε t−j
θ0 = 1.
j=0
también puede escribirse como:
xt = θ q ( L ) ε t ,
q
donde θq (L) = 1 + ∑ θj Lj .
j=1
Promedios Móviles (MA)
MA(1)
Algunos aspectos de un MA(1) :
xt = ε t + θ1 ε t−1 ,
de donde se obtiene:
E [xt ] = 0,
h
i
var(xt ) = E (xt − E [xt ])2
h
i
= E (xt )2
h
i
= E ( ε t + θ 1 ε t−1 )2
= E ε2t + θ1 ε t ε t−1 + θ12 ε2t−1
= 1 + θ12 σ2 .
Promedios Móviles (MA)
MA(1)
La autocovarianza de primer orden está dada por:
cov(xt , xt−1 ) = E [(xt − E [xt ]) (xt−1 − E [xt−1 ])]
= E [xt xt−1 ] = E [(ε t + θ1 ε t−1 ) (ε t−1 + θ1 ε t−2 )]
= E ε t ε t−1 + θ1 ε t ε t−2 + θ1 ε2t−1 + θ12 ε t−1 ε t−2
= E θ1 ε2t−1
= θ1 σ 2 .
Por lo que la autocorrelación de primer orden es:
θ1 σ 2
cov(xt , xt−1 )
θ1
.
corr(xt , xt−1 ) =
=
=
var(xt )
1 + θ12 σ2
1 + θ12
nótese que es posible estimar ρ1 = corr(xt , xt−1 ), pero entonces
obtendrı́amos dos estimadores de θ1 , uno siempre dentro de la region
[−1, 1] , el otro siempre fuera de esa region.
Promedios Móviles (MA)
MA(1)
La autocovarianza de segundo orden es:
cov(xt , xt−2 ) = E [xt xt−2 ]
= E [(ε t + θ1 ε t−1 ) (ε t−2 + θ1 ε t−3 )]
= E ε t ε t−2 + θ1 ε t ε t−3 + θ1 ε t−1 ε t−2 + θ12 ε t−1 ε t−3
= 0.
de donde se observa que todas las autocovarianzas (y por lo tanto
autocorrelaciones) mayores a q (el orden del MA) son cero.
Los procesos MA siempre son estacionarios.
Promedios Móviles (MA)
Ejemplo: xt = ε t + 0.9ε t−1 , con ε t ∼ N (0, 1), t = 1, ..., 100.
3
2
x; MA(1), theta = 0.9
1
0
-1
-2
-3
-4
0
20
40
60
80
100
Promedios Móviles (MA)
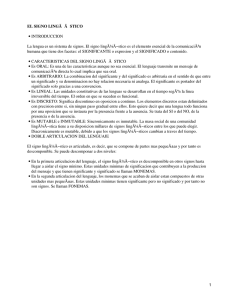
Correlograma y correlagrama parcial
ACF for x; MA(1), theta = 0.9
1
+- 1.96/T^0.5
0.5
0
-0.5
-1
0
2
4
6
8
10
12
14
lag
PACF for x; MA(1), theta = 0.9
1
+- 1.96/T^0.5
0.5
0
-0.5
-1
0
2
4
6
8
lag
10
12
14
Modelos Autorregresivos y de Promedios Móviles
(ARMA)
Proceso autorregresivo y de promedios móviles de orden p,q,
ARMA(p, q):
φp (L)xt = θq (L)ε t .
Un ejemplo es el proceso ARMA(1, 1):
xt = φxt−1 + ε t + θ1 ε t−1 .
Modelos Autorregresivos y de Promedios Móviles
(ARMA)
Los procesos mixtos pueden generarse agregando otros modelos.
Por ejemplo:
xt
φ1 (L)xt
φ2 (L)yt
εt
zt
φ1 (L)φ2 (L)zt
∼ AR(m),
yt ∼ AR(n),
xt ⊥ yt
= εt
= ηt
⊥ ηt , con media cero
= xt + yt
ηt
εt
=
+
φ1 (L) φ2 (L)
1
=
[φ2 (L)ε t + φ1 (L)ηt ]
φ1 (L)φ2 (L)
= [φ2 (L)ε t + φ1 (L)ηt ]
⇒ zt ∼ ARMA(m + n, r), r = máx(m, n).
Metodologı́a de Selección de Modelos Box-Jenkins
Los procesos ARMA tienen firmas (ACF y PACF) que permiten
identificarlos, sin embargo dichas firmas son demasiado parecidas
o complejas, lo cual dificulta la selección de la especificación.
Box y Jenkins propusieron una técnica estadı́stica para la selección
de un modelo ARMA que se ajuste a los datos, la cual consiste de
las siguientes etapas
1
2
3
4
Identificación
Estimación
Diagnóstico
Pronóstico
Metodologı́a Box-Jenkins (Identificación)
Selección del orden de un ARMA(p,q)
Para seleccionar el orden del proceso, es decir, p y q, se utilizan los
llamados criterios de información. Los dos más populares son el
Akaike (1974) y el Bayesiano de Schwarz (1978):
2(p + q)
2
,
AIC = ln σ̂p,q
+
T
(p + q) ln(T )
2
+
BIC = ln σ̂p,q
,
T
donde T es el tamaño de la muestra. Se escogen los valores de p y
q que minimizan el criterio de información seleccionado.
En caso de que no sea posible discriminar entre modelos, es
posible quedarnos con los modelos relevantes y tratar de
combinarlos de alguna forma (modelado denso: “Thick
modeling”).
Metodologı́a Box-Jenkins (Estimación)
Estimación de un ARMA(p,q)
Bajo el supuesto de que se conoce el orden p y q del proceso
ARMA, es posible hacer uso distintos de métodos de estimación
de parámetros los cuales son puestos en práctica con la ayuda de
programas computacionales.
Si el orden del proceso ARMA no es conocido, éste puede ser
estimado con la ayuda de los criterios de información. Para dicho
propósito se estiman procesos ARMA de manera recursiva con un
orden creciente tanto en p como en q ( p = 1, . . . , pmax y
q = 1, . . . , qmax ). Finalmente se elige la combinación (p∗ , q∗ ) que
minimiza el criterio seleccionado.
Metodologı́a Box-Jenkins (Estimación)
Estimación de un AR(p)
Se mostrará la estimación para el caso de un proceso AR(p), para
el cual sus parámetros pueden ser estimados mediante tres
métodos:
1
2
3
Máxima Verosimilitud
Método de Momentos (Ecuaciones Yule-Walker)
Mı́nimos Cuadrados
Metodologı́a Box-Jenkins (Estimación)
Estimación de un AR(p)
Máxima Verosimilitud
Si conocemos la distribución del ruido blanco que genera el
proceso AR(p), los parámetros pueden ser estimados usando el
método de máxima verosimilitud
Tomando x1 como dada, la verosimilitud condicional para las
n − 1 observaciones restantes es
L∗ = p (x2 , x3 , . . . , xn |x1 )
= p (x2 |x1 ) p (x3 |x1 , x2 ) (xn |x1 , x2 , . . . , xn−1 )
Para obtener la verosimilitud no condicional habrá que calcular
L = p ( x1 ) L ∗
Metodologı́a Box-Jenkins (Estimación)
Estimación de un AR(1)- Máxima Verosimilitud
Bajo el supuesto de un proceso AR(1) con ruido blanco gaussiano, i.e.
xt = φxt−1 + ε t
E[ε t ] = µ var[ε t ] = σ2
las distribuciones son:
t=1
µ
σ2
,
1 − φ 1 − φ2
x2 |x1 ∼ N µ + φx1 , σ2
x1 ∼ N
t=2
t>1
xt |xt−1 , . . . , x1 ∼ N µ + φxt−1 , σ2
Metodologı́a Box-Jenkins (Estimación)
Estimación de un AR(1)- Máxima Verosimilitud
La función de Verosimilitud es
(
2 )
− 21
1
σ2
1 − φ2
µ
L = √
exp −
y1 −
2σ2
1−φ
2π 1 − φ2
)
(
T
1
(xt − φxt−1 )2
√
exp
∏ 2πσ2
2σ2
t=2
La log-verosimilitud es
T
1
l = − ln(2π ) − ln
2
2
σ2
1 − φ2
1 − φ2
−
2σ2
µ
y1 −
1−φ
2
T
n−1
(xt − φxt−1 )2
2
−
ln σ − ∑
2
2σ2
t=2
la estimación de los parámetros se obtiene de maximizar ya sea
analı́ticamente o mediante una optimización numérica.
Metodologı́a Box-Jenkins (Estimación)
Estimación de un AR(p)
Método de Momentos - Ecuaciones Yule-Walker
Las ecuaciones Yule-Walker son extraı́das de la función de
autocorrelación de un proceso AR(p), la cual tiene la siguiente
forma:
1,
para j=0;
ρj =
φ1 ρj−1 + φ2 ρj−2 + . . . + φp ρj−p , para j=1,2,. . . .
por lo tanto existen p parámetros distintos y hay p ecuaciones
Yule-Walker. Se puede resolver este sistema reemplazando ρj
(correlación teórica) por ρbj (correlación muestral) y obtener
estimadores de los parámetros φi para i = 1, 2, . . . , p.
Metodologı́a Box-Jenkins (Estimación)
Estimación de un AR(p)
Mı́nimos Cuadrados
Se ajusta por MCO la siguiente especificación:
xt = φ1 xt−1 + φ2 xt−2 + · · · + φp xt−p + ut
si la ecuación satisface las condiciones de√
estacionariedad
MCO
b
arroja estimadores consistentes. Además T φi − φi
i = 1, 2, . . . , p se distribuye asintóticamente normal.
El estimador de MCO es equivalente al estimador de MV cuando
el vector de errores sigue una distribución normal multivariada.
Metodologı́a Box-Jenkins (Estimación)
Estimación de un MA(q)
Se presenta la estimación de un proceso MA(q) por el método de
Máxima Verosimilitud, dicho método no es el único disponible
para estimarlo, pero cualquier método que pretenda hacerlo debe
ser capaz de estimar una función no lineal en los parámetros (por
ejemplo, mı́nimos cuadrados no lineales).
Metodologı́a Box-Jenkins (Estimación)
Estimación de un MA(1)
Máxima Verosimilitud
Se calcula la función de verosimilitud, para el caso
et ∼i.i.d. N(0, σ2 )
xt = µ + ε t + θε t−1
las probabilidades condicionales son:
I t = 1 Bajo el supuesto ε = 0
0
x1 |(ε 0 = 0) ∼ N(µ, σ2 )
ε 1 = x1 − µ
I
t=2
x2 |(x1 , ε 0 = 0) ∼ N(µ − θε 1 , σ2 )
ε 2 = x2 − µ − θε 1
Metodologı́a Box-Jenkins (Estimación)
Estimación de un MA(1)
Las probabilidades condicionales son en general de la forma
p(yt |ε t−1 )
I t > 1
xt |(xt−1 , . . . , x1 , ε 0 = 0) ∼ N(µ − θε t−1 , σ2 )
ε t = xt − µ − θε t−1
La función de verosimilitud es
T
L =
∏ p(yt |ε t−1 )
t=1
T
=
∏
t=1
ε2
√
exp − t 2
2σ
2πσ2
1
Metodologı́a Box-Jenkins (Estimación)
Estimación de un MA(1)
La log-verosimilitud es
T
T
1
l = − ln(2π ) − ln(σ2 ) − 2
2
2
2σ
T
∑ ε2t
t=1
el último término de la expresión es una función no lineal de los
parámetros por lo cual es necesario el uso de métodos iterativos
para obtener los estimadores.
La estimación de un proceso ARMA(p, q) comparte el reto de
estimación presente en un proceso MA.
Metodologı́a Box-Jenkins (Diagnóstico)
Pruebas de Diagnóstico
La inferencia estadı́stica que se hace a partir de MCO o MV puede
ser aplicada en el contexto de la estimación de un proceso ARMA
siempre y cuando se cumplan las condiciones de estacionariedad.
Los residuales del modelo proveen información importante, si
éstos no aproximan un ruido blanco el modelo seleccionado no es
satisfactorio y es necesario una nueva especificación.
Metodologı́a Box-Jenkins (Pronóstico)
Pronósticos por pasos
Denotemos por pt+h,t al pronóstico realizado en t para el horizonte
h.
Se define el error de pronóstico como et+h,t = xt+h − pt+h,t . Notese
que pt+h,t es conocido en el tiempo t, mientras que et+h,t y xt+h lo
son hasta el periodo t + h.
El error cuadrático medio (ECM) de un pronóstico es
H
ECM =
∑
h=1
e2t+h,t =
H
∑ (xt+h − pt+h,t )2
h=1
el cual promedia el error de pronóstico de manera simétrica.
Se puede demostrar que el mı́nimo en el ECM se alcanza cuando
el pronóstico de la variable pt+h,t es la esperanza condicional de la
variable xt+h , dada toda la información disponible en el tiempo t.
Metodologı́a Box-Jenkins (Pronóstico)
Pronósticos por pasos para un AR(1)
Consideramos un proceso AR(1) de la forma
xt = φxt−1 + ε t
E[ε t ] = µ var[ε t ] = σ2
Para calcular el pronóstico un paso hacia adelante del proceso
partimos de saber que su verdadero valor es
xt+1 = φxt + ε t+1
El pronóstico, es la esperanza condicional de xt+1 dada la
información disponible en el tiempo t, cuando se minimiza el
ECM esto es
pt+1,t = E[xt+1 |xt ] = φxt + µ
el error asociado es
et+1,t = xt+1 − E[xt+1 |xt ]
= xt+1 − φxt − µ
= ε t+1 − µ
Metodologı́a Box-Jenkins (Pronóstico)
Pronósticos por pasos para un AR(1)
El pronóstico dos pasos hacia adelante es
pt+2,t = E[xt+2 |xt ] = φE[xt+1 |xt ] + µ = φ2 xt + (1 + φ)µ
et+2,t = xt+2 − E[xt+2 |xt ]
= φxt+1 + ε t+2 − φE[xt+1 |xt ] − µ
= φet+1,t + ε t+2 − µ
= ε t+2 + φε t+1 − (1 + φ)µ
El pronóstico h pasos hacia adelante es
pt+h,t = E[xt+h |xt ] = φh xt + µ 1 + φ + φ2 + · · · + φh−1
et+h,t = ε t+h + φε t+h−1 + φ2 ε t+h−2 + · · · + φh−1 ε t+1
− 1 + φ + φ 2 + · · · + φ h−1 µ
Metodologı́a Box-Jenkins (Pronóstico)
Pronósticos por pasos para un AR(1)
Las propiedades del error de pronóstico de horizonte h son
E[et+h,t ] = 0
Var[et+h,t ] =
1 + φ 2 + φ 4 + · · · + φ 2(h−1) σ 2
Conforme el horizonte de pronóstico crece
µ
pt+h,t −→
cuando
1−φ
Var[et+h,t ] −→
σ2
1 − φ2
cuando
h −→ ∞
h −→ ∞
i.e. el valor pronósticado tiende a la media no condicional del
proceso, y la varianza del error de pronóstico se incrementa hacia
la varianza no condiconal del proceso.
Metodologı́a Box-Jenkins (Pronóstico)
Pronósticos por pasos para un AR(1)
Al tener una distribución para el error de pronóstico es posible
construir intervalos de confianza (IC) para los pronósticos h pasos
hacia adelante.
Para el caso de un pronóstico un paso hacia adelante
et+1,t ∼ N 0, (1 + φ)σ2
por lo cual un IC al 95 % está dado por
1
IC : µ + φxt ± 1,96 (1 + φ)σ2 2
Metodologı́a Box-Jenkins (Pronóstico)
Pronósticos por pasos para un MA(1)
Consideremos un proceso MA(1) de la forma
xt = µ + ε t + θε t−1
E[ε t ] = 0 var[ε t ] = σ2
Para calcular el pronóstico un paso hacia adelante del proceso
partimos de saber que su verdadero valor es
xt+1 = µ + ε t+1 + θε t
El pronóstico, cuando se minimiza el ECM, es
pt+1,t = E[xt+1 |xt ] = µ + θε t
El valor de ε t depende de los valores previos de ε, para la
implementación es común fijar ε 0 = 0, está aproximación pierde
importancia conforme el tamaño de muestra crece.
Calculamos el error asociado
et+1,t = xt+1 − E[xt+1 |xt ]
= xt+1 − µ − θε t = ε t+1
Metodologı́a Box-Jenkins (Pronóstico)
Pronósticos por pasos para un MA(1)
El pronóstico dos pasos hacia adelante es
pt+2,t = E[xt+2 |xt ] = µ
et+2,t = xt+2 − E[xt+2 |xt ] = xt+2 − µ = ε t+2 + θε t+1
En un proceso MA(1) el pronóstico por pasos tiene el siguiente
esquema
h≥2
pt+h,t = µ
2
var(et+h,t ) = (1 + θ )σ
2
h≥2
para dos periodos adelante, el pronóstico de un MA(1) es
simplemente la media no condicional de la serie, y la varianza del
error de pronóstico es la varianza de la serie.
Teorema de Wold
xt univariada, estacionaria y con media cero. It consiste del pasado
y del presente de la serie: xt−j , j ≥ 0.
(Representación de Wold) Cualquier proceso estacionario {xt }
puede representarse como:
∞
xt = c(L)ε t + vt =
∑ cj ε t−j + vt ,
j=0
donde c0 = 1 y ∑j∞=0 c2j < ∞. El término ε t es ruido blanco y
representa el error hecho al pronosticar xt basándose en una
función lineal de rezagos de xt :
ε t = x t − P ( x t | It − 1 ) .
vt un proceso linealmente determinı́stico y no está correlacionado
con ε t−j ∀j, mientras que ∑j∞=0 cj ε t−j es llamado el componente
lineálmente no determinı́stico (i.e. estocástico).
Procesos Determinı́sticos
Son aquéllos que pueden ser pronosticados perfectamente, dado
que conocemos la función que los genera.
Por ejemplo, si la función generadora es:
yt = a + bt,
entonces, el valor de yt+1 puede ser pronosticado perfectamente,
al igual que el de yt+k :
yt + 1 = a + b ( t + 1 ) ,
yt+k = a + b(t + k).
Descomposición Tradicional de una Serie de Tiempo
Una serie de tiempo puede pensarse como compuesta de distintos
elementos, algunos de ellos determinı́sticos y otros estocásticos:
yt = tendencia + estacionalidad + resto,
yt = t + s + ε,
los dos primeros han sido considerados tradicionalmente como
determinı́sticos, asi que la parte estocástica es a lo que llamamos
resto.
La tendecia puede ser lineal, o puede ser ajustada por un
polinomio de más alto grado. También puede presentar cambios
estructurales o ser estocástica. En caso de presentar tendencia, las
series son no estacionarias.
Estacionalidad
Existen varios métodos para tratar datos estacionales:
En el caso en que sea verdaderamente repetitiva, podemos utilizar
12
un filtro de promedios moviles: yt∗ = ∑ aj yt−j
j=−12
aj = a − j .
Incluir una variable dicotómica (dummy) para cada “estación” (y
no incluir una constante). Esto asume que la estacionalidad no
cambia en la muestra.
Usar datos “ajustados estacionalmente”. El factor estacional se
estima tı́picamente usando un filtro de dos lados para los datos de
cada “estación” en años contiguos. De esta forma se pueden
extraer una amplia gama de factores estacionales. Algunos filtros
son el X-12 ARIMA o el TRAMO-SEATS. Sin embargo, el ajuste
estacional también altera las auto-correlaciones de las series.
Aplicar una diferencia estacional. Si s es el número de estaciones
(4 para trimestres, 12 para meses), entonces: ∆s yt = yt − yt−s . La
serie ∆s yt está libre de estacionalidad, sin embargo, esto también
elimina la tendencia de largo plazo.
Bibliografı́a
Box, George E.P., Gwilym M. Jenkins y Gregory C. Reinsel. 2008.
Time Series Analysis Forecasting and Control. 4a ed. New
Jersey:Wiley.
Brooks, Chris. 2008. Introductory Econometrics for Finance. 2a ed.
Cambridge:Cambridge University Press.
Enders, Walter. 2010. Applied Econometric Time Series. 3a ed. New
Jersey:Wiley.
Guerrero, Vı́ctor. 2003. Análisis Estadı́stico de Series de Tiempo
Económicas. 2a ed. México:Thomson.
Granger, Clive W.J. y Paul Newbold. 1986. Forecasting Economic
Time Series. 2a ed. San Diego:Academic Press.
Hamilton, James D. 1994. Times Series Analysis. Princeton
University Press.