SISTEMA DE CONTROL DE POSICIÓN PARA LA NUEVA
Anuncio

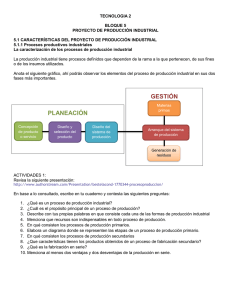
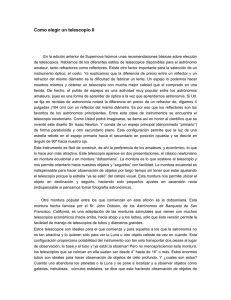
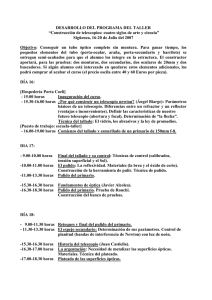
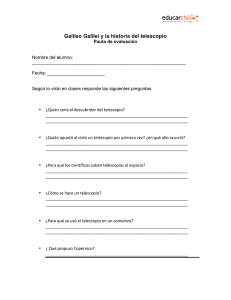
SISTEMA DE CONTROL DE POSICIÓN PARA LA NUEVA MONTURA DEL SECUNDARIO DEL TELESCOPIO DE 84cm. Versión 1.0. F. Murillo, G. Sierra, B. García, B. Martínez, J.M. Murillo, J. Valdez, A. Córdova. Resumen. El presente trabajo describe en detalle el sistema de control de posición para la nueva montura del secundario del telescopio de 84cm, el cual esta formado por las tarjetas electrónicas, programa de control, interfaz de usuario y cableado en el telescopio. Mayo de 2006. i 1 INTRODUCCIÓN.................................................................................................................... 1 2 DESCRIPCIÓN DEL SISTEMA. ........................................................................................... 2 2.2 Organización del sistema. ................................................................................................. 2 2.3 Distribución del sistema en el telescopio de 84cm. .......................................................... 3 2.4 Electrónica de control ....................................................................................................... 4 2.4.1 Etapa digital. ........................................................................................................... 5 2.4.2Etapa de potencia..................................................................................................... 6 2.4.2 Conectores y Cableado .......................................................................................... 8 2.5 Programa de control........................................................................................................ 11 3 INTERFAZ DE USUARIO ................................................................................................... 12 4 EN CASO DE FALLAS ......................................................................................................... 13 4.1 Procedimiento para instalar las tarjetas de repuesto. ...................................................... 14 APENDICE A. DIAGRAMAS ELECTRÓNICOS. ............................................................... 17 A.1 Esquemático de la etapa Digital..................................................................................... 17 A.2 Esquemático de la etapa de potencia.............................................................................. 18 A.3 Mapa de componentes de la etapa Digital...................................................................... 19 A.4 Mapa de componentes de la etapa de potencia. ............................................................. 19 A.5 Alambrado de los interruptores límite............................................................................ 20 APENDICE B. ESPECIFICACIÓNES ELÉCTRICAS. ....................................................... 21 B.1 Especificaciones del motor............................................................................................. 21 B.2 Especificaciones del freno.............................................................................................. 21 B.3 Especificaciones del potenciometro. .............................................................................. 21 B.4 Especificaciones del codificador. ................................................................................... 22 B.4 Especificaciones de las fuentes. ..................................................................................... 23 BIBLIOGRAFIA ....................................................................................................................... 24 1 1 INTRODUCCIÓN El interés creciente en los últimos años por utilizar el telescopio de 84cm del OAN en trabajos que requieren de imagen directa con CCD; alentó la idea de construir una nueva montura para su secundario, que corrigiera las deficiencias presentadas por la montura original. Estas fueron: movimientos laterales durante el proceso de enfoque y flexiones dependientes de la posición del telescopio [1]; las cuales no eran de importancia para trabajos de fotometría, uso que tradicionalmente se le dio a este telescopio. La nueva montura se diseñó y construyó en las instalaciones del Instituto de Astronomía en Ensenada. Consta de un eje motorizado único, el de enfoque, lo que la hace muy sencilla desde el punto de vista de las necesidades de control electrónico. Posee un mecanismo para realizar movimientos de inclinación (Tip-Tilt) del espejo de manera manual. Los desplazamientos para el centrado del espejo se realizan moviendo la araña del secundario, la cual fue reconstruida también en su totalidad. Para el movimiento del eje de enfoque se utiliza un motor de corriente directa y como retroalimentación un codificador de posición incremental con resolución de una micra. Además se utiliza un potenciómetro como codificador absoluto para obtener la posición inicial de la montura. Para el posicionado automático de este eje se diseñó un sistema electrónico que permite moverlo con precisión de hasta una micra, tal precisión no es necesaria por lo que actualmente se opera con precisión de cinco micras. La ejecución de los movimientos se realiza en modo manual (paleta) o automático mediante un programa gráfico que corre en una computadora operada por el usuario del telescopio. Con el objetivo fundamental de realizar observaciones remotas en un futuro cercano. Se ha modificado el enlace de comunicación con los instrumentos para que sean controlados a través de la red ethernet. El control electrónico de esta nueva montura se apega a esta tendencia y cuenta con un procesador que se conecta directamente a la red; eliminando la necesidad de utilizar una computadora intermediaria para habilitar esta función, como se hacia tradicionalmente. En este reporte se describe el sistema electrónico de posicionado de la nueva montura del secundario del telescopio de 84cm, en su diseño e implementación. Se describe en detalle los circuitos electrónicos, los conectores, el cableado y los programas; así como la distribución de las diferentes componentes en el telescopio de 84cm. También se describe la interfaz de usuario que es un programa gráfico muy sencillo diseñado para realizar el movimiento de enfoque. 2 2 DESCRIPCIÓN DEL SISTEMA. En este capítulo se describen las partes que integran el sistema de control de posición así como su distribución en el telescopio de 84cm. Se muestran los diagramas electrónicos, cableado y las instrucciones del programa de control; así como algunas fotografías tomadas durante la instalación del sistema en el telescopio de 84cm. 2.2 Organización del sistema. Las partes que componen el sistema y la conexión entre ellas se ilustran en el diagrama a bloques de la figura 1, las cuales se describen a continuación: sobre la montura del secundario se encuentra un motor de corriente directa para realizar el movimiento de enfoque, un par de codificadores de posición, uno absoluto y otro incremental y un par de interruptores límite para impedir el movimiento en uno u otro sentido una vez que se ha alcanzado un extremo de la carrera del mecanismo. Fuera de la montura del secundario se ubica el sistema electrónico de control de movimientos, un par de fuentes de alimentación y una paleta de movimientos manuales. M o n tu ra d e l s e c u n d a rio F u e n te s d e a lim e n ta c ió n (+ 5 V ,+ 2 4 V ) M o to r (D C ) E le c tró n ic a d e c o n tro l d e m o v im ie n to C o d ific a d o re s d e p o s ic ió n P a le ta F re n o R e d E th e rn e t In te rru p to re s lím ite In te rfa z d e u su a rio C o m p u te r Figura 1. Diagrama a bloques del sistema de posicionamiento de la montura del secundario del telescopio de 84cm. Las fuentes de alimentación se ilustran como un bloque separado ya que físicamente se encuentran alejadas de la electrónica de control de movimiento, éstas proveen de los voltajes necesarios para operar el sistema (+5V y +24V). La fuente de +5V alimenta el procesador y los circuitos digitales. La fuente de +24V alimenta la etapa de potencia que acciona el freno y mueve el motor de DC. 3 La paleta para movimientos manuales es la misma que se utilizaba en el secundario anterior, ésta se utiliza para mover el secundario en un sentido u otro accionando un par de interruptores que se operan desde el piso del telescopio o desde el cuarto de observación. El uso de la paleta se recomienda solo cuando la posición de foco se encuentra muy alejada del valor óptimo, en posiciones cercanas al foco es preferible utilizar el programa gráfico que permite realizar movimientos más finos. La electrónica de control de movimientos se encuentra dividida en dos etapas, la etapa digital y la etapa de potencia, la etapa digital cuenta con un procesador que recibe los mandos de movimiento vía ethernet y monitorea la posición del secundario a través de los codificadores de posición. La etapa de potencia maneja el motor y el freno, además cuenta con circuitos de protección contra situaciones de operación inusuales, como puede ser un eventual amarre del mecanismo. El posicionamiento automático se realiza a través de un programa gráfico, hecho en lenguaje TCL-TK, que se ejecuta en una PC denominado interfaz de usuario que actualmente es la PC Grulla ubicada en la sala de observación del telescopio de 84cm. La interfaz de usuario envía los mandos de movimiento al controlador de movimientos y recibe la posición actual del secundario en todo momento. La comunicación entre la interfaz de usuario y el controlador de movimientos es vía red ethernet. 2.3 Distribución del sistema en el telescopio de 84cm. En esta sección se muestra la ubicación de cada componente del sistema en el telescopio de 84cm, para ello nos apoyamos en la figura 2. Sobre la pared Sur del piso de telescopio se ubica el registro de fuentes, que consta de un gabinete que contiene en su interior dos fuentes de alimentación (+5V y +24V), también contiene un transformador que alimenta la retícula del buscador y que se encontraba en este gabinete en tiempos anteriores a la instalación de la nueva montura. La electrónica de control de movimiento se ubica en la platina del telescopio, se escogió este lugar por la accesibilidad que ofrece al momento de realizar alguna reparación. Consta de un gabinete pequeño con dos tarjetas electrónicas en su interior, la etapa digital y la de potencia, ambas alimentadas por las fuentes de voltaje a través del cable de alimentación que se instaló sobre el yugo del telescopio. La conexión a la red se toma del hub de platina a través de un cable de red con conectores RJ-45. Las señales de paleta se obtienen del registro de platina [2] y se conectan mediante un cable a la electrónica de control de movimiento. La electrónica de control de movimiento se conecta al motor, freno y codificadores colocados sobre la montura del secundario mediante un par de cables con blindaje metálico para eliminar señales presentes en el ambiente que puedan causar interferencia. 4 Gorro del secundario Cableado de motor, freno y codificadores O N S Registro de fuentes (+5V, +24V) E Electrónica de control de movimiento del secundario (192.168.0.5) Hub Platina (192.168.0.x) Registro de platina Cable de red Cable de paleta Cable de alimentación Figura 2. Distribución del sistema de control de movimiento del secundario del telescopio de 84cm. Las características de los componentes del sistema así como los conectores utilizados se describen en la siguiente sección. 2.4 Electrónica de control La electrónica de control de movimiento se divide en dos etapas, la etapa digital y la etapa de potencia. Físicamente cada una de ellas se encuentra en una tarjeta impresa por separado para minimizar los efectos de interferencia entre ambas (Fig. 3). Ambas tarjetas se colocaron en el mismo gabinete, separadas por una jaula de Farady y todas las señales que comparten se encuentran optoacopladas. En esta sección se describe el funcionamiento de cada una de estas etapas. 5 Etapa digital Etapa de potencia Figura 3. Electrónica de control de movimiento. 2.4.1 Etapa digital. La etapa digital esta formada por todos los componentes electrónicos que operan con niveles de voltaje TTL (0-5V) como lo son el procesador y los circuitos lógicos utilizados. Los diagramas electrónicos de esta etapa se muestran en el apéndice A. El diagrama A.1 muestra el esquemático y el diagrama A.3 muestra el mapa de componentes de la tarjeta impresa. Estos diagramas son útiles al momento de realizar alguna reparación de mantenimiento donde se desea rastrear alguna señal en particular. La organización de esta electrónica se muestra en el diagrama a bloques de la figura 4, consta de un procesador Rabbit3000 quien se encarga de la comunicación vía ethernet con el exterior, además de controlar y monitorear la posición de la montura. Un receptor RS422 quien se encarga de acondicionar a niveles TTL (0-5V) las señales diferenciales provenientes del codificador. Un convertidor analógico a digital de 16 bits que nos da un valor numérico dependiente de la posición del potenciómetro, éste se utiliza para obtener la posición de inicio de la montura. Por último cuenta con una etapa lógica que se utiliza para reforzar las señales de salida. Existen tres señales de salida en esta etapa y cuatro de entrada, todas presentes en el conector SV1 (Diagrama A.1). Las señales de pulso (PULSO) y dirección (DIR) se utilizan para el movimiento del motor cuya velocidad se controla mediante la técnica de modulación de ancho de pulso PWM. La señal de pulso tiene una frecuencia de 40KHz y su ciclo de trabajo es ajustado entre 0 y 100% para obtener la velocidad del motor deseada, la señal de dirección es binaria y se utiliza para definir el sentido de giro del motor. La señal de freno (FRENO_D) se utiliza para liberar o accionar el freno electromecánico que actúa sobre la montura. 6 Las señales de paleta (PAL_1 y 2) se utilizan para indicar al procesador Rabbit que mueva la montura en un sentido o en otro, estas señales se utilizan para mover el secundario en modo manual. Las señales FRENO_OK y S_CARGA son banderas provenientes de la etapa de potencia, la primera indica que el freno se ha liberado satisfactoriamente y permite que el motor se mueva, la segunda indica que el consumo de corriente del motor se encuentra por arriba del umbral de seguridad establecido. E tap a d ig ital E tap a ló g ica R ecep to r (R S 4 2 2 ) C o d ificad o r PA L_1 PA L_2 P ro cesado r R ab b it P o ten cio m etro PU LSO D IR FREN O_D FREN O_OK S_CA RG A C o n v ertid o r an alóg ico d ig ial Figura 4. Organización de la etapa digital. Todas las señales de entrada y salida se conectan a la etapa de potencia que se describe en la siguiente sección. 2.4.2 Etapa de potencia La etapa de potencia se encarga de acondicionar las señales TTL (0-5V), provenientes de la etapa digital descrita en la sección anterior, a los niveles de voltaje y corrientes requeridos para manejar los dispositivos de potencia como lo son el motor y el freno electromecánico, los cuales operan a 24V. Las características eléctricas tanto del motor como del freno se muestran en el apéndice B. Esta etapa se encuentra aislada de la etapa digital debido a que el esquema de control PWM genera interferencia que afecta a la etapa digital, para minimizar este efecto cada tarjeta se encuentra separada por una jaula de Faraday independiente. Ambas tarjetas se conectan mediante un cable plano. Los diagramas electrónicos de esta etapa se muestran en el apendice A. El diagrama A.2 muestra el esquemático y el diagrama A.4 muestra el mapa de componentes de la tarjeta impresa. Estos diagramas son útiles al momento de realizar alguna reparación de mantenimiento donde se desea rastrear alguna señal en particular. 7 La organización de esta etapa se muestra en el diagrama a bloques de la figura 5. Todas las señales de entrada y salida hacia la etapa digital son optoacopladas. Las señales de pulso y dirección se conectan al maejador de motor PWM. El cual es un circuito integrado de la compañía National Semiconductor LMD18200, etiquetado como U2 en el diagrama A.2, capaz de manejar una carga de hasta 3A a 55V. La salida de U2 consta de las señales PUENTE1 y PUENTE2 que se conectan al motor a través de los interruptores límite como se muestra en el diagrama A.5. E tap a d e po tencia PULSO D IR M an ejad or de m o to r (P W M ) Interrup to r d e freno FREN O _D PA L_1 PA L_2 PUENTE1 PUENTE2 FREN O S W _P A L 1 O pto acoplado res S W _P A L 2 F R E N O _O K S enso r d e corriente del fren o S _C A R G A S ensor d e corriente del m o tor Figura 5. Organización de la etapa de potencia. El freno es manejado a través del transistor 2N2222 (Diagrama A.2) quien le proporciona una corriente de 220mA para liberarlo. La corriente de consumo del freno es monitoreada por la resistencia R16 y el comparador U1B quien tiene un umbral de comparación que se ajusta mediante el potenciómetro POT2 aproximadamente a 0.190V. Este circuito comparador genera la bandera FRENO_OK cuando se detecta un consumo de corriente por arriba de 190mA que significa que el freno se ha liberado. Es importante mencionar que si la bandera FRENO_OK no se genera el motor no se mueve, este modo de operación se implementó como medida de seguridad. Las señales SW_PAL1 y 2 provienen de los interruptores de paleta y simplemente se optoacoplan para enviarlas a la etapa digital. También se cuenta con un segundo comparador U1A quien monitorea la señal de consumo de corriente generada por el circuito U2, etiquetada como SENS en el diagrama y cuyo nivel de variación es de 1V por Amper de corriente en el motor. El comparador 8 genera la señal S_CARGA cuando detecta que el consumo de corriente del motor se encuentra por arriba del umbral de comparación establecido. 2.4.2 Conectores y Cableado Como se mostró en la figura 2 el sistema se encuentra distribuido en el telescopio y piso del telescopio por lo que se utilizaron diferentes cables para interconectar cada parte. En esta sección se describe cada uno de los conectores y tiras terminales utilizadas en el cableado del sistema. 2.4.2.1 Conectores en el gabinete de la electrónica de control del secundario. El gabinete que contiene la electrónica del control del secundario mostrado en la figura 3 se encuentra ubicado en la platina del telescopio. Sobre él se encuentran dos conectores uno para la etapa digital y otro para la de potencia. Para las señales de la etapa de potencia se utilizó un conector circular Amphenol cuya configuración se muestra en la tabla 1. A este conector llegan señales provenientes de tres lugares: el secundario (FRENO, PUENTE1 y 2), las fuentes (+24V y GNDA) y el registro de platina (SW_PAL1 y 2). Tabla 1. Señales del conector circular Amphenol de la etapa de potencia. Pin H A B K J G C E F D A K B H G J E D Señal PUENTE1 (Salida al motor). PUENTE2 (Salida al motor). SW_PAL1 (Interruptor de paleta 1) SW_PAL2 (Interruptor de paleta 2) FRENO (Salida al freno) +24V (Entrada de voltaje) GNDA (Tierra de la fuente de +24V) GNDA (Tierra de la fuente de +24V) Para las señales de la etapa digital se utilizó un conector DB15 cuya configuración se muestra en la tabla 2. A este conector llegan señales provenientes de dos lugares: la fuente (+5V, GND) y del secundario llegan las señales del codificador y el potenciómetro. El cableado de estos dos conectores se muestra en la figura 6. Como se muestra en la figura, se colocó un conector DB9 en el cable de las fuentes, éste fue necesario para permitir desconectar el cable al momento de realizar alguna labor de mantenimiento que implique el desmontaje de la celda del primario, en un aluminizado del espejo por ejemplo. 9 Tabla 2. Señales del conector DB15 de la etapa digital. 9 10 11 12 13 14 15 1 2 3 4 5 6 7 8 Pin 1 2 3 4 5 6 7 9 11 13 12 14 Señal POT1 POT2 +UA1 -UA1 +5V -UA2 +UA2 WPOT +5V +5V GND GND (Potenciometro) (Potenciometro) (Señal de cuadratura del encoder) (Señal de cuadratura del encoder) (Salida de aliementación para el encoder) (Señal de cuadratura del encoder) (Señal de cuadratura del encoder) (Wiper del potenciometro) (Alimentación proveniente de la fuente) (Alimentación proveniente de la fuente) (Tierra de la fuente de 5V) (Tierra de la fuente de 5V) ( PALETA ) ( FRENO, PUENTE1-2 ) CONECTOR CIRCULAR, A LA ETAPA DE POTENCIA +24V DB9 ( FUENTES ) CONECTOR DB15, A LA ETAPA DIGITAL +5V ( POTENCIOMETRO ) ( CODIFICADOR HEIDENHAIN) Figura 6. Configuración del cableado y conectores. 2.4.2.2 Tira Terminal del registro de fuentes. Como se mostró en la figura 2, el registro de fuentes se encuentra ubicado en el lado sur del piso del telescopio, sobre la pared. Dentro de este registro se encuentran dos fuentes de alimentación +24V y +5V, colocadas como se muestra en la figura 7 a). Para distribuir las señales se colocó una tira con terminales o zapatas cuya asignación de pines se muestra en la figura 7 b). Desde esta tira Terminal se tendió un cable de ocho hilos, que fueron apareados como lo indican los colores señalados en la figura 7 b), hasta la platina del telescopio donde mediante un conector DB9 se distribuyen los voltajes tanto a la etapa digital como a la de potencia (Ver Fig. 6) . 10 Fuente 24V ( Señal ) Fase 1 1 Negro 2 2 Blanco Neutro Fuente 5V GND 3 +5V 4 3 Café-Negro 4 Rojo-Naranja GND 5 5 Verde-Azul +24V 6V ac (Reticulas) ( Color ) 6 7 8 6 Amarillo-Blanco 7 8 Rojo 9 Amarillo 10 9 10 Tira term inal Figura 7. Gabinete de fuentes de alimentación. a) Contenido, b) Señales en tira terminal. 2.4.2.3 Tiras Terminales sobre el secundario. Dentro del gorro del secundario (Ver Fig. 2) se localizan tres tiras Terminales, dos de cuatro contactos colocadas hacia el lado Este, etiquetadas como Tira 1 y 2 (Ver Fig. 8) y una de diez contactos colocada hacia el lado Oeste etiquetada como Tira 3 (Ver Fig. 9). En estas tiras se conectan los dispositivos montados sobre la estructura del secundario como lo son el motor, freno, potenciómetro y codificador. T ira 2 T ira 1 ( S eñal ) FRENO PUENTE1 PUENTE2 ( C o lo r ) B la n co 1 B la n c o 2 3 R o jo V e rd e 4 T ira 1 ( C o lo r ) 1 B la n c o -A m a rillo 2 V e rd e-A z u l 3 R o jo-N a ra n ja 4 N e g ro -C a fe C a b le q u e c o n e cta a la ca ja d e c o n tro l ( C o lo r ) A zul 1 C a fe 2 N e g ro 3 4 P o te n cio m e tro T ira 2 . ( C o lo r ) 1 A m a rillo 2 R o jo 3 V e rd e 4 (S e ñ a l) +5V W POT GND C a b le q u e co n e cta a la c a ja d e co n tro l Figura 8. Distribución de señales en las Tiras 1 y 2 ubicadas dentro del gorro del secundario. 11 Sobre la tira 1 se han colocado los cables del motor y freno. Se ha utilizado un cable con blindaje para estas señales ya que la señal PWM genera interferencia si no se le aísla adecuadamente. En la figura 8 se indica también el color de cada hilo utilizado para cada señal. Esta tira se conecta mediante el cable al conector de la etapa de potencia mostrado en la tabla 1. Sobre la Tira 2 se han conectado los cables del potenciómetro y sobre la Tira 3 los cables del codificador, estas señales se conectan al conector de la etapa digital mostrado en la tabla 2. Debido a que existe una tarjeta electrónica dentro de la cacha del conector del codificado no fue posible acortar el cable y tuvo que ser enrollado dentro del gorro del secundario. T IR A 3 (C O D IF IC A D O R ) ( Señal ) Ua1 /U a 1 Ua2 /U a 2 + 5V GND ( C o lo r ) 1 1 2 2 3 3 4 5 4 5 N a ra n ja 6 7 6 7 8 9 8 9 A m a rillo A zu l 10 10 C a fe R o jo N e g ro Figura 9. Distribución de señales en la tira 3 ubicada dentro del gorro del secundario. 2.5 Programa de control El programa de control es ejecutado por un procesador Rabbit3000, que forma parte de la electrónica de control de movimiento, se encarga de ejecutar los mandos de movimiento de la montura del secundario así como de monitorear su posición. Para ello desde este programa es posible controlar el encendido y apagado del motor, el amarre o liberación del freno del mecanismo de enfoque y la lectura de los codificadores de posición incremental y absoluto. El programa de control recibe los mandos vía una conexión ethernet en la dirección de IP: 192.168.0.5 en el puerto 3333. Existen diez mandos que este programa acepta los cuales podemos dividir en tres grupos: el grupo A que se utilizan para solicitar información sobre el estado de los codificadores, el grupo B que son instrucciones que van acompañadas de un argumento y se utilizan para modificar alguna variable del programa y las del grupo C que son instrucciones que no utilizan argumento y tampoco requieren de una respuesta estas se utilizan para realizar una acción específica. Este 12 conjunto de instrucciones se muestran en la tabla 1. Todas las instrucciones terminan con el símbolo ‘;’ y las del grupo B llevan su argumento entre paréntesis. Tabla 1. Instrucciones del programa de control. ADC; ENC; Grupo A Lee la posición del codificador absoluto (Potenciómetro). Regresa la posición en una cadena de números terminada con el símbolo ‘;’. Lee la posición del codificador incremental. Regresa la posición en una cadena de números terminada con el símbolo ‘;’. Grupo B MUEVE(Px); Mueve el secundario a una posición deseada, dada por la variable “Px” la cual es un número en el rango 0-55000. Al terminar el movimiento, esta instrucción regresa la posición final en una cadena de números terminada con el símbolo ‘;’. Ki(ki); Fija el valor de la constante de control integral ‘ki’, el valor típico de esta constante es 1. Regresa el eco de la instrucción. Kp(kp); Fija el valor de la constante de control integral ‘kp’, el valor típico de esta constante es 8. Regresa el eco de la instrucción. PWM_MAX(Xpwm); Define la velocidad máxima de movimiento ‘Xpwm’, la cual es un número en el rango 0-1024. DOWN; UP; ALTO; ZERO; Grupo C Mueve el secundario hacia abajo de forma indefinida. Mueve el secundario hacia arriba de forma indefinida. Detiene el movimiento del secundario. Define el cero del codificador incremental. 3 Interfaz de usuario La interfaz de usuario consiste en un programa gráfico, hecho en lenguaje TCLTK, que se comunica con la electrónica de control de movimiento mediante las instrucciones listadas en la tabla 1. Se ejecuta en la computadora de usuario que actualmente es la PC Grulla, la cual tiene el sistema operativo Linux. La ventana principal de la interfaz se muestra en la figura 10 a), se divide en tres partes definidas por recuadros colocados de manera descendente. El recuadro superior muestra la posición actual de la montura, una unidad en el valor numérico mostrado equivale a 5 micras de desplazamiento de la montura. El recuadro intermedio muestra una caja para colocación de valores de entrada y dos botones en los que se han colocado flechas indicando que el secundario se moverá hacia arriba o hacia abajo el número de 13 posiciones indicadas por el valor de entrada. En el recuadro inferior se ha colocado una caja para valores de entrada donde se coloca la posición que se desea y un botón para indicar al controlador del secundario que se lo lleve a esa posición. a) b) Figura 10. Interfaz de usuario. a) Ventana convencional, b) Despliegue al ejecutarse un movimiento. Cada que se oprime un botón ya sea para movimientos incrementales o absolutos aparece el mensaje “MOVIENDO” en el lugar donde normalmente se despliega la posición. Este mensaje desaparece cuando la montura se ha colocado en la posición deseada. Como se mencionó anteriormente, los movimientos que se logran haciendo uso de la interfaz tienen una resolución de 5 micras por lo que se recomienda utilizar esta interfaz siempre que se este cerca del foco deseado. Con la paleta manual no se logra un ajuste fino ya que ésta mueve la montura a una velocidad fija la cual es un poco elevada para lograr el enfoque. 4 En caso de fallas El sistema se ha probado durante un periodo de seis meses en los cuales ha demostrado ser robusto. Las fallas más comunes que se pueden presentar en este sistema son las siguientes: 14 a) Fallas de comunicación. Esta falla solo afecta la interacción entre la interfaz gráfica y el controlador de posición, por lo que en esta situación debe ser posible mover el secundario con la paleta manual. En tal caso proceda a revisar el cable ethernet y el estado del Hub de platina. b) El secundario no se mueve desde la interfaz ni con la paleta manual. Esta falla puede deberse a que el controlador se halla bloqueado. Proceda a dar un reset a la electrónica, esto se hace moviendo el interruptor del gabinete de fuentes, ubicado en la pared sur del piso de telescopio, entre las posiciones de OFF y ON. Revise el voltaje de las fuentes. Si el problema no se soluciona proceda a colocar la electrónica de repuesto siguiendo el procedimiento mostrado en la sección 4.1. Como se mencionó en la sección 2.4.2, si la señal de FRENO_OK no se genera el motor no se mueve, pruebe moviendo el potenciometro POT2 para disminuir el voltaje de umbral o para hacer una prueba rápida puede desconectar el comparador U1 (Diagrama A.2)sacándolo de su base. c) El secundario oscila. Esto puede deberse a un falso contacto en el cable plano que conecta las tarjetas de la enectrónica. Proceda conectarlo y desconectarlo moviéndolo de un lado a otro. Si el problema no se soluciona proceda a colocar la electrónica de repuesto siguiendo el procedimiento mostrado en la sección 4.1. 4.1 Procedimiento para instalar las tarjetas de repuesto. Actualmente existe un juego de tarjetas de repuesto de la electrónica del secundario completo, se encuentra en una caja dentro del gabinete de electrónica. En caso de que se dañe la electrónica proceda como se indica en esta sección para colocar los repuestos. 1.- Apague el interruptor que se localiza en el gabinete de fuentes (Ver Fig. 11). Este interruptor apaga ambas fuentes (24V y 5V). 2.- Desconecte el cable de red. Es necesario desconectarlo primero para poder extraer la tarjeta que contiene la etapa digital. 3.- Abra la puerta del gabinete de la electrónica de control y retire el marco de hule. Este marco impide retirar la sección intermedia indicada en el siguiente paso. 4.- Con una llave Allen 3/32 retire los tornillos que sujetan la división intermedia y retírela (Ver Fig. 12). Si se retira esta sección es más cómodo retirar los tornillos que sujetan las tarjetas. 15 G a b in e te d e fu e n te s d e l s e c u n d a rio . In te rru p to r Figura 11. Localización del interruptor general del sistema. Figura 12. Extracción de la división intermedia. 4.- Con la misma llave retire los tornillos que sujetan cada tarjeta. Cada tarjeta se encuentra separada de la placa del gabinete mediante un conjunto de espaciadores que se encuentran pegados a la base por lo que no deben caerse al retirar los tornillos (Ver Fig. 13). 5.- Desconecte los conectores de las tarjetas. 6.- Coloque las nuevas tarjetas. 7.- Conecte los conectores. 8.- Encienda el interruptor de las fuentes. 16 E s p a c ia d o re s (E ta p a d ig ita l) E s p a c ia d o re s (E ta p a d e p o te n c ia ) Figura 13. Ubicación de los espaciadores sobre la placa del gabinete de la electrónica. 17 Apendice A. Diagramas electrónicos. U7A U7B U4 MAX1162 A.1 Esquemático de la etapa Digital. 18 (0.192 V) A.2 Esquemático de la etapa de potencia. 19 A.3 Mapa de componentes de la etapa Digital. P1 P2 U4 A.4 Mapa de componentes de la etapa de potencia. P uente 1 (A zu l) N .C S w _P al2 (A m arillo ) POT2 S w _P al1 (A m arillo ) F ren o (B lan co ) P u en te 2 (A zul) POT1 + 2 4 V (R o jo ) G N D A (N eg ro ) 20 A.5 Alambrado de los interruptores límite. D io d o PUENTE1 TIRA1 ( C a b le R o jo ) M o to r ( C a b le R o jo ) In te rru p to r lím ite su p e rio r D io d o PUENTE2 ( C a b le V e rd e ) M o to r ( C a b le N e g ro ) In te rru p to r lím ite in fe rio r 21 Apendice B. Especificaciónes eléctricas. B.1 Especificaciones del motor. Fabricante: Modelo: Voltaje de operación: Globe Motors Consumo: 0.26A +24V B.2 Especificaciones del freno. Modelo: 16MFSB-15-O-V Voltaje de operación: +24VDC Consumo de 0.24A corriente: B.3 Especificaciones del potenciometro. Fabricante: Modelo: No. de parte: Carrera lineal: Resistencia: Tolerancia lineal: ETI Systems LWR10 LWR10S-30-10K 3cm 10K (5%) 1% 22 B.4 Especificaciones del codificador. Fabricante: Modelo: No. de parte: Precisión: Carrera: Señal de salida: Voltaje de operación: HEIDENHAIN ST3078 375-133-02 ±1µm 2.54cm Cuadratura (RS-422) +5V Señales en el conector. Pin 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Señal Ua1 GND Ua2 +5V NC NC /Ua0 NC /Ua1 GND /Ua2 5V (Sensor) /UaS Ua0 NC 23 B.4 Especificaciones de las fuentes. Fuente de +24V. Voltaje de entrada: 120Vac Voltaje de salida: +24V Corriente: 3.6A Tipo: Lineal Fabricante: International power No de Parte: IHN24-3.6 Fuente de +5V. Voltaje de entrada: 120Vac Voltaje de salida: +5V, ±12V Corriente: 3A Tipo: Conmutada Fabricante: Mean Well No de Parte: T-40B 24 BIBLIOGRAFIA [1] Sierra G. y Murillo F. “Anteproyecto de una nueva montura para el secundario del telescopio de 84cm”. CI-2004-03. [2] F. Lazo, S. Zazueta, J.L. Ochoa. “Red de alambrado del telescopio de 0.84m”. RT2004-27