Español - SciELO Colombia
Anuncio

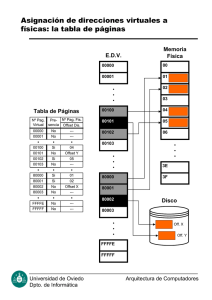
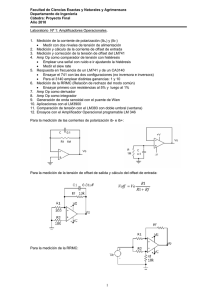
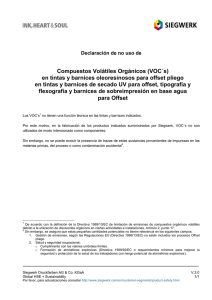
Revista EIA, ISSN 1794-1237 Número 10, p. 31-43. Diciembre 2008 Escuela de Ingeniería de Antioquia, Medellín (Colombia) CURVAS PARALELAS EXPLÍCITAS DE LAS CURVAS CÓNICAS NO DEGENERADAS PARA EL TORNEADO CNC DE LENTES Y ESPEJOS ASFÉRICO-CÓNICOS Juan Camilo Valencia* Álvaro Hernán Bedoya** RESUMEN Este artículo presenta el método para obtener, en coordenadas cartesianas, las líneas curvas paralelas de las curvas cónicas no degeneradas, por métodos analíticos y numéricos. Se define el offset como una función paralela a la función original a una distancia r. El offset de una cónica es importante para los procesos de fabricación de mecanismos, lentes, espejos y moldes; especialmente en el torneado con control numérico computarizado (CNC) de superficies de revolución con secciones cónicas, usando buriles de diamante con punta de radio r. También se presenta una técnica refinada usando interpolación circular segmentaria para construir numéricamente el offset de una parábola, que también puede usarse como modelo para determinar el offset de la elipse y de la hipérbola. PALABRAS CLAVE: CNC; elipse; hipérbola; lente; offset; parábola. Explicit parallel curves of non-degenerate conic curves for the turned CNC of aspheric-conic lenses and mirrors ABSTRACT This paper presents the method to obtain, in Cartesian coordinates, the parallel curve lines of non-degenerate conical curves, by analytical and numerical methods. Offset is defined as parallel function to the original function to a distance r. Offset of a conic is important for the manufacturing processes of mechanisms, lenses, mirrors, and molds; especially in the turning with computerized numerical control (CNC) of surfaces of revolution with conical sections, using diamond tools of radio r. Also a refined tip technique using segmental circular interpolation to numerically construct the parabola offset is presented, that also can be used as model to determine offsets of ellipse and hyperbola. KEY WORDS: CNC; ellipse; hyperbola; lens; offset; parabola. * Ingeniero de Producción y candidato a Magíster en Matemáticas Aplicadas, Universidad EAFIT. Profesor Asistente, Escuela de Ingeniería de Antioquia. [email protected] ** Licenciado en Matemáticas y Física, Universidad de Antioquia. Candidato a Maestría en Matemáticas Aplicadas, Universidad EAFIT. [email protected] Artículo recibido 28-IV-2008. Aprobado 9-XII-2008 Discusión abierta hasta junio de 2009 Curvas paralelas explícitas de las curvas cónicas no degeneradas... 1. INTRODUCCION El concepto del offset de las curvas planas ha sido estudiado desde Leibniz en 1692, en Generalia de natura linearum, anguloque contactus et osculi provocationibus allisque cognatis et eorum usibus nonnullis. Numerosos métodos matemáticos y computacionales se han desarrollado con técnicas de análisis numérico (Abłamowicz y Liu, 2006). Gracias al notable avance en el desarrollo de software, hoy es posible obtener soluciones analíticas explícitas para encontrar las raíces de los polinomios característicos de grado superior. Las soluciones explícitas reducen considerablemente el tiempo de cómputo y dan una descripción matemática mucho más simple que la mayoría de las técnicas con análisis numérico (Aigner, 1997). El offset de líneas rectas o curvas se requiere en las modernas máquinas con control numérico computarizado (CNC) y se especifica comúnmente como la “corrección de herramienta”. La trayectoria de la herramienta de corte se efectúa siguiendo la geometría del offset para obtener la geometría esperada, con una distancia de paralelismo correspondiente al radio r de la punta de la herramienta. Este artículo presenta las soluciones analíticas para el offset de las curvas cónicas no degeneradas, restringidas a una distancia de paralelismo r menor que el mínimo radio de curvatura, ya que su uso se cumple generalmente con esta condición. Adicionalmente se presenta un método numérico para obtener el offset de una parábola. 2. OFFSET ANALÍTICO DE UNA PARÁBOLA Se consideran dos parábolas suplementarias con vértices en el origen que se expresan como z=± x2 4f con f > 0 (1) donde f es la distancia focal, y el signo está definido según el sentido del maquinado, ya sea cóncavo o convexo. En los puntos P(x0, ± z0), las ecuaciones de las rectas normales a las parábolas respectivas son de la forma: §2 f · z = # ¨¨ ¸¸ x + z0 ± 2 f (2) x © 0¹ con x0 ≠ 0 y z0 = ± los puntos P: x02 . Construyendo unas circunferencias con radio r y con centro en 4f z = z0 ± r 2 − ( x − x0 ) 2 32 (3) Revista EIA donde las normales intersecan las respectivas circunferencias en dos puntos, cada una, si r > 0 y r menor que el mínimo radio de curvatura, que pertenecen al offset cóncavo y convexo. Igualando (2) con (3) y elevando al cuadrado a ambos lados, y resolviendo para x0 se obtienen las funciones del offset explícitas y reales, de manera recurrente: donde las normales intersecan las respectivas circunferencias en dos puntos, cada una, si 2 § + cada x 2 −una, a) ·¸ysicon1de curvatura, a 2 que pertenecen 6 x(puntos, 8 foffset r > 0las y rnormales menor que el1mínimo radio al cóncavo 2circunferencias donde intersecan las respectivas en dos ¨ x0 = x+d ± 6 x − − 4a − c + vexo. (2) con cuadrado a ambos lados, yalresolviendo para ¨(3) y elevando ¸ yx0 se r> 0 y Igualando r menor que el 2mínimo radio3dealcurvatura, pertenecen offset d cóncavo c que © offset ¹ obtienen las funciones del(3) explícitasaly cuadrado reales, deamanera recurrente: convexo. Igualando (2) con y elevando ambos lados, y resolviendo para (4) x0 se obtienen las funciones del offset explícitas y reales, de manera recurrente: ( a − c) 2 (4) 3c f 2 x12 r 2 , c =a 2 a 3 + b +6 x(b8 (f 22 a+ 3x 2+−ba)) d = x 2 + con a = 4 f 2 + x 2 − r 2 , b =1216 y x = x+d ± 6 x 2 − − 4a − c + 0 ac 2 6 x(8 df 2 + x 2 −a) ·¸ 1 2§ 13 x0 = ¨ x + d ± 6 x 2 − − 4a − c + ¸ d 2¨ c 3 ¹ si, en (3) se© obtiene el offset de las parábolas, si y solo Reemplazando (4) 2 2 2 2 corresponde en con a =al42 mínimo f2+ r 2 , b =de216 a 3 vértices + b + 3 b(,2a 3 + b) 2 x 2− radio 2 curvatura 2 f2 x r , c 3= los (4) r < 2f, 2que (a − c) 2 2 y d = (ax− c+) con a = 4 f + x − r , b = 216 f x r , c = a + b + b(2a + b) d = x 2 + 3c y 3c 2 §1 § a2 (4) en (3) + x2 − a)el·¸·¸offset de la parábola, si y solo si r ≤ 2f, que 1 6x (se 8 fobtiene 2 ¨ ¨ x + d −Reemplazando x − − a − c + 6 4 en c(3) se obtiene el offset de ¸las parábolas, r < 2f, que ¨ ¨Reemplazando d 2 corresponde § 1si§y solo si, 3 (4) al mínimo radio de curvatura en¹¸los vértices, a2 1 6x (8 f 2 + x2 − a) ·¸·¸ © + r2 −,¨ x − ¨ x + d − z = ± ©corresponde al mínimo radio de curvatura en los ¹vértices 6x2 − − 4a − c + ¸¸ ¨ 2¨ c d 4f 3 © ¹¹ © z =± §1 ¨ ¨2 © § ¨x+d − 1 ¨ 3 © 6x2 − a2 6x ( 8 f 2 + x2 − a) ·¸·¸ − 4a − c + ¸¸ c d ¹¹ 4f § 1 + r2 − ¨ x − ¨ 2 © § ¨x+d − 1 ¨ 3 © 6x2 − a2 6x (8 f 2 + x2 − a) ·¸·¸ − 4a − c + ¸¸ c d ¹¹ (5) (5) donde el signo positivo corresponde al offset cóncavo y el signo negativo corresponde al (5) offset convexo, según el sentido del maquinado, por lo general se conoce en la industria donde el signo positivo corresponde al offset cóncavo y el signo negativo corresponde al offset comodonde “corrección aelderecha” o “corrección a izquierda” según elencorresponde sentido delcomo avance, es el signo positivo corresponde al offset cóncavo y el signo negativo convexo, según sentido del maquinado, que por lo general se conocen la industria al decir,offset a“corrección laconvexo, derecha de laeltrayectoria o laa izquierda degeneral la eltrayectoria. sentido del maquinado, por lo se conoce en la industria a según derecha” o “corrección izquierda” según sentido del avance, es decir, a como “corrección a derecha” o “corrección a izquierda” según el sentido del avance, es la derecha de la trayectoria o la izquierda de la trayectoria. a la1derecha de la trayectoria o la izquierda de la trayectoria. ladecir, figura se presentan dos parábolas normalizadas, es decir, con vértice en En el origen En la figura 1 se presentan dos parábolas normalizadas, es decir, con vértice en el y susEnrespectivos offsets requeridos paranormalizadas, el torneadoesCNC usando buriles con radio de la la figura 1 se presentan dos parábolas decir, con vértice en el origen origen y sus respectivos offsets requeridos para el torneado CNC, usando buriles con radio puntay sus r. respectivos Según las normas para denominación de buriles los ejes de delasla máquinas offsets requeridos parala el torneado CNC usando con radio de la punta r. Según las normas para la denominación de los ejes de las máquinas compucomputarizadas se las corresponden la notación de quelosusa así, la punta r. Según normas para con la denominación ejesendeeste las documento, máquinas tarizadas se corresponden con la notación que usa en este documento, así, la ordenada z computarizadas se corresponden la dirección notación que en este así, la ordenada z corresponde eje lineal con en la delusa husillo de documento, la maquina. corresponde eje lineal en la dirección del husillo de la máquina. ordenada z corresponde eje lineal en la dirección del husillo de la maquina. Figura 1. Offset cóncavo y convexo de z = ± x2/200 con distancia de paralelismo r = 10, considerando el sentido del maquinado. Offset1. cóncavo y convexo de z = ± x2/200 con distancia de paralelismo r = 10, Figura 1.Figura Offset cóncavo y convexo de z = ± x2/200 con distancia de paralelismo r = 10, considerando el sentido del maquinado. considerando el sentido del maquinado Escuela de Ingeniería de Antioquia 33 Curvas paralelas explícitas de las curvas cónicas no degeneradas... También explícitamente, se obtiene obtiene mediante el algoritmo, lala solución TambiénTambién explícitamente, se obtiene mediante el mismo algoritmo, la solución para para explícitamente, se mediante el mismo mismo algoritmo, solución para del offset convexo: x = 2 f z del offset offsetconvexo: convexo: xx==22 f f zz del 2 2 3 También explícitamente,3 se obtiene mediante el mismo algoritmo, la solución para Sea a =3 2( f + z )2 − 27 fr3 y b = − a + 3r − 3(2a 2− 27 fr ) f , el convexo se se expresa Sea el offset convexo Seax a= =2 2(f fz +del z )offset − 27convexo: fr y b = − a + 3r − 3(2a − 27 fr ) f el offset , convexo se , como: expresa como: expresa como: 2 Sea a = 2( f + z ) 3 − 27 fr 2 y b = 3 − a + 3r 1−§3(2a − 27 fr 2 )2f 3 2el( offset se · f + z)convexo 3 ¨¨ − 2 f 2+342z (+f + ,z) 2 3 + ¸¸ z 4 b = § · 1 0 expresa como: ¨ ¸ b+ 4b z = − 2 f 6+ 4z + (6) (6) (6) © ¹ ¸ 6 ¨© b ¹ 2 3 0 1§ 2 2 ( f + z) 3 · z0 = ¨¨ − 2 f + 4z + (6) x = 2zb0 + r2+−(42zb−¸¸¹ z0 )2 (7) 6© x = z0 + r −(z − z0 ) (7) (7) y el offset cóncavo: x = z + r2 −(z − z )2 (7) 0 y el offset cóncavo: y el offset cóncavo: ( 0 3 y el offset cóncavo: z = 1 §¨ − 4 f + 8 z + 2 2 − 1 + i 3 3 0 ( ) ) ( f + z) · − 3 4 b 1 + i 3 ¸¸ (8) · ¹ − 3 4 b 1 ·+ i 3 ¸¸ (8) 2 ¨ 1 § 2 2 −1 + i 3 ( f + z) z 0 = 1 ¨¨§− 4 12 f +©8 z +23 2 (− 1 + i 3 ) ( f + zb)2 b z 0 =12 ©¨¨ − 4 f + 8 z + − 3 4 b ( 1 + i 3 )¸¸ b 12 © 2 ¹ x = z0 − r − (z − z0 )2 2 2 ( ( (8) (8) ¹ (9) 2 x = z − r − (z − z0 ) x = z0 −0 r2 − (z − z0 )2 ) ) (9) (9) (9) 3. OFFSET ANALÍTICO DE UNA ELIPSE OFFSET UNA ELIPSE 3. OFFSET OFFSETANALÍTICO ANALÍTICODE DE UNA ELIPSE 3.3. ANALÍTICO DE UNA ELIPSE Se consideran dos semielipses con vértices en el origen, que se expresan como Se consideran dos semielipses con vértices en el origen, que se expresan como Se considerandos dossemielipses semielipses con en en el origen, que se expresan como 2 expresan como Se consideran convértices vértices el origen, que xse z = ±A # A 1− B2 x2 2 2 2 x x zz==±±AA#A AB 1 −1 −2 z = ±A # A 1− (10) (10) (10) donde A y B semiejes, y A > B, donde elBsigno está definido según el sentido (10) de B2 maquinado, ya sea o convexo. donde A y B semiejes, y cóncavo A > B, donde el signo está definido según el sentido de maquinado, sea cóncavo donde A y Byasemiejes, y oAconvexo. > B, donde el signo está definido según el sentido de y ya B semiejes, y Amétodo B, donde el signo está para definido según el sentido donde AUsando mismo analítico utilizado determinar offset dede la maquinado, parábola se maquinado, seaelcóncavo o>convexo. el mismo método utilizado para determinar el offset de la parábola se obtiene elo offset deanalítico una elipse. yaUsando sea cóncavo convexo. obtiene el offset de una elipse. Usando el mismo método analítico utilizado para determinar el offset de la parábola se En los puntos P(x0método , z0) la ecuación deutilizado las rectas normales a las elipses respectivas son de Usando el mismo determinar el offset obtiene offsetP(x de En losel puntos , z0) elipse. la ecuación deanalítico las rectas normales apara las elipses respectivas son dede la parábola 0una la forma: selaobtiene forma: el offset de una elipse. En los puntos P(x0, z0) la ecuación de las rectas normales a las elipses respectivas 2son de 2 · x2 § x x 2 rectas la forma:En los puntos P(x B z2 = # Bx02 0,§ z1x0)− la0·ecuación ¨ − 1¸ +de z 0 ,lascon x0 ≠ normales 0 y z 0 = ±xA0a #las A elipses 1 − 0 respectivas (11) z=# son de la forma:A 1 − A2 ¨¨ −B1¸¸2 +¨zx0 , con ¸ x0 ≠ 0 y z 0 = ± A # A 1 − 2 ¹ B © x0 B ¹ © 0 (11) B 2 · x02 § x x02 B2 ¨ ¸ z=# 1 − − 1 + z , con x ≠ 0 y z = ± A # A 1 − 0 0 2x 2¨ x ¸ 0 x2 2 B2 z = A 1 −B 02© x 0 −¹1 + z 0 , con x0 ≠ 0 y z 0 = ± A A 1 −B 02 A B x0 B (11) (11) Construyendo circunferencias respectivas con radio r, con centros en los puntos P(x0, z0): z = z0 ± r 2 − ( x − x0 ) 2 34 (12) Revista EIA Construyendo circunferencias respectivas con radio r, con centros en los puntos P(x0, z0): z = z0 ± r 2 − ( x − x0 ) 2 (12) Construyendo circunferencias respectivas con radio r, con centros en los puntos P(x0, z0): 2circunferencias Construyendo circunferencias respectivas radio r, 2con centros en los puntos z0): si 0,(12) Donde las normales intersecan lascon respectivas en dosP(x puntos, z = zcircunferencias 0 ± r − ( x − x0 )respectivas en dos puntos, si Donde las normales intersecan las r > 0, que 2 2 r > 0, que pertenecen al offset cóncavo z = z0y ±convexo, r − ( xsegún − x0 ) el sentido del maquinado. Igualando (12) pertenecen al offset cóncavo y convexo, según el sentido del maquinado. Igualando (11) (11) con (12) y elevando al cuadrado a ambos lados, y resolviendo x para>obtener la Donde intersecan las circunferencias respectivas en dos para puntos, 0, que obtener la con (12)lasynormales elevando al cuadrado a ambos lados, y resolviendo para0 six0r para Donde las normales intersecan las circunferencias respectivas en dos puntos, si r > 0,(11) que pertenecen offsetexplícita cóncavo y convexo, según el sentido del maquinado. Igualando función delal offset y real función del offset explícita y yreal pertenecen al offset cóncavo convexo, del maquinado. Igualando obtener(11) la con (12) y elevando al cuadrado a ambossegún lados,el ysentido resolviendo para x0 para con (12) elevando al cuadrado función delyoffset explícita y real a ambos lados, y resolviendo para x0 para obtener la · (13) función y real 2 a2 1 § del offset explícita 1 6 x (2B 4 − a + ( A2 − B 2 ) x 2 ) 2 2 ¸ (13) x0 = ¨ x + d # A − B x + − a − − c 6 ( ) 4 4 2 2 2 2 · ¸ d c 21 ¨©§¨ x B − a + A − B x a 6 (2 ( ) ) 12 − B2 ) A 3 ( 2 2 2 ¸ ¹ (13) x0 = 1 x§ + d # 6 ( A − B ) x + 6 x (2B 4 − a + ( A2 − B 2 ) x 2 )− 4a − a 2− c · 21 2 d (13) x0 =2 ¨© ¨ x + d # 3 ( A − B ) 6 ( A2 − B 2 ) x 2 + − 4a − c − c¸¹ ¸ 2 ¨© 44 2 d 3 ( A2 −2 2B 2 ) 2 22 c ¸ ¹ 2 2 2 2 2 2 22 BA( B A2 −( AB222 − ) rB22x222), rc2=x 23 , ac3 = + b3 +a 3 b+(b2a+3 + b )(2a 3 + b) Conaa==BB −− A rr ++((AA −−BB) x) x, b, =b54 Con = A54 4 2 2 2 2 2 2 2 3 Con a = B − A r + ( A − B ) x , b = 54 A B ( A − B ) r x , c = 3 a 3 + b + b (2a + b) Con a =2 2B 4 − (Aa2 −−r 2cc)+2)22( A2 − B 2 ) x 2 , b = 54 A2 B 2 ( A2 − B 2 ) r 2 x 2 , c = 3 a 3 + b + b (2a 3 + b) y y d d== xx2 ++ (a 22− c) 22 . . y d = x + 33((A(2a −− −B cB2) 2))cc. y d = x 2 +3( A 2− B )2c . 3( A − B )c Reemplazando en (12) se obtiene eldeoffset de elipses suplementarias, sisiysi, Reemplazando (13)enen(13) (12) obtiene el offset deelipses laslaselipses suplementarias, ysolo solo si, Reemplazando (13) (12) sese obtiene el offset las suplementarias, si y solo (13) en (12) se obtiene el offset de las elipses suplementarias, si y solo si, el radio de corrección es menor que el radio de curvatura del círculo osculador en elelsiReemplazando radio de corrección es menor que el radio de curvatura del círculo osculador radio de corrección es menor que el radio de curvatura del círculo osculador en el elen el el radio de corrección es menor que el radio de curvatura del círculo osculador en el origen, es origen, decir, origen, esesdecir, decir, origen, es decir, 3 3 2 2 § §§ dz ·dz · 22 §¸ 2 ¸·· 32 ·¸ ¨1§ +¨¨ dz + 1 § · ¨ ¨1¨+© ¨dx¨¹ ¸x =0 ¸ ¸ ¸ B 2 2 ¹ © dx r < ρ = © ¨© © 2© dx ¹ x =0 ¸¹x =0=¹ B=2 B r ρ < = r < ρ = d z2 2 = A d z A A d 2z dx 2x =02 dxdxx =0 x =0 (14) (14) (14) (14) 2 §1§ ·· 2 1 6 x (2 B 4 − a + ( A 2 − B 2 ) x 2 ) a2 2 ¨ § ¨ x§ + d # 6 ( A 2 − B 2 ) x 2 + 6 x (2 B 4 − a 4+ ( A 2 − B 22) x 2 )−24a −2 a 2− c ¸ ·¸ · 2 ·· ¨§¨2¨11¨§¨ x + d # 3 ( A 2 1−1B 2 ) ¸ 2 2 2 ¸ ¸ 6 ( 2 ( ) ) a x B a A B x − + − c d 2 2 2 ¸ 6 (6A( A− B− )Bx )+x + − 4a − − 4−ac¹−¹ ¸ ©¨ ¸¸ − c ¸¸ c d z = ± A # A 1 − ©¨ ¨22¨¨©x + d # 3 ( A 2 2− B 2 )2 2 d ¹¹c © 3 ( ) A B − B ¹¹ z = ±A # A 1− © z = ±A # A 1− © B2 2 B 2 § ·· 2 1 § 1 6 x (2 B 4 − a + ( A 2 − B 2 ) x 2 ) a2 + r − ¨ x§ − 1¨ x§ + d # 6 ( A 2 − B 2 ) x 2 + 6 x ( 2 B 4 − a + ( A 2 − B 2 ) x 2 )− 4 a − a 2− c ¸ ·¸ · 1 2 d (15) + r 2 §−¨© ¨ x −2 ¨©§ ¨ x + d # 3 ( A 2 − B 2 ) 6 ( A2 − B 2 ) x 2 + − 4 a − c − c¸ ¸ ¸ ·· 21 2 6 x ( 2 B 4 d− a + ( A 2 − B 2 ) x 2 ) c ¹ ¸¹ ¸a 2 ¨ 12¨¨ 2 2 2 2 ¨ ¸ 3 ( A − B ) ¸ ©x + d # + r − x© − 6 (A − B ) x + − 4 a −¹ ¹ − c 2 ¨ © 2 ¨© 3 ( A2 − B 2 ) d c ¸¸ ¹¹ (15) (15) La2figura 2 muestra offsetuna para una semielipse normalizada sin considerar el sentido (15) La figura muestra el offsetelpara semielipse normalizada sin considerar el sentido del La figura 2 muestra el offset para una semielipse normalizada sin considerar el sentido del del maquinado en el eje z. maquinado en el eje z. maquinado en el eje z. La figura 2 muestra el offset para una semielipse normalizada sin considerar el sentido del Las interfases elípticas e hiperbólicas de revolución son importantes en la óptica industria Las interfases de revolución son importantes en la industria maquinado enelípticas elelípticas eje z.e ehiperbólicas Las interfases hiperbólicas de revolución son importantes en la industria óptica óptica para la fabricación deespeciales lentes especiales alta precisión, por lo el tanto, el uso del offset para la fabricación de lentes de alta de precisión, por lo tanto, uso del offset es para la fabricación de lentes especiales de alta precisión, por lo tanto, el uso del offset es es necesario para garantizar la calidad geométrica. necesario para garantizar la calidad geométrica. Las interfases e hiperbólicas de revolución son importantes en la industria óptica necesario paraelípticas garantizar la calidad geométrica. para la fabricación de lentes especiales de alta precisión, por lo tanto, el uso del offset es necesario para garantizar la calidad geométrica. Escuela de Ingeniería de Antioquia 35 Curvas paralelas explícitas de las curvas cónicas no degeneradas... Figura 2. Offset de una semielipse, cóncavo y convexo, para z = A − A 12− x 22 / B 2 Figura 2. Offset de una semielipse, cóncavo y convexo, para z = A − A 1 − x / B con A = 200, con A = 200, B =100, r = 5, sin considerar el sentido del maquinado =100, r =de 5, una sin considerar sentido del maquinado. FiguraB 2. Offset semielipse,elcóncavo y convexo, para z = A − A 1 − x 2 / B 2 con A = 200, B =100, r = 5, sin considerar el sentido del maquinado. OFFSET ANALÍTICO DEHIPÉRBOLA UNA Figura4. 2. Offset de una semielipse, cóncavo convexo, para z =HIPÉRBOLA A − A 1 − x / B con A = 200, 4. OFFSET ANALÍTICO DEy UNA 2 2 B =100, r = 5, sin considerar el sentido del maquinado. 4. OFFSET ANALÍTICO DE UNA HIPÉRBOLA Se seseexpresan como Seconsideran consideranlas lassemihipérbolas semihipérbolascon convértices vérticesenenelelorigen, origen,que que expresan como 4. consideran OFFSET ANALÍTICOcon DEvértices UNA HIPÉRBOLA Se las semihipérbolas en el origen,2que se expresan como x z = # A ± A 21 + 2 (16) x xque 2 Bse expresan como Se consideran las semihipérbolas con vértices en el origen, z =z=A#±AA± A1 +1 + 2 (16)(16) 2 B B 2 donde A y B semiejes, y A > B, donde el x signo está definido según el sentido de = # A ± A 1+ 2 (16) maquinado, ya sea cóncavo o zconvexo. B donde B semiejes, > B,eldonde el signo estásegún definido segúndeelmaquinado, sentido de y A > yB, Adonde signo está definido el sentido con A yAB ysemiejes, maquinado, sea cóncavo ya seaUsando cóncavo omismo convexo. algoritmo en las cónicas anteriores obtiene el offsetdeanalítico de donde A y Byaelsemiejes, y A o>convexo. B, que donde el signo está definido se según el sentido la hipérbola: maquinado, ya sea cóncavo o convexo. Usando el mismo algoritmo delas las cónicas secciones 2 y 3, se se obtiene el offset analítico de la Usando el mismo algoritmo que en anteriores obtiene el offset analítico de hipérbola: la hipérbola: Usando el mismo algoritmo que en las cónicas anteriores se obtiene el offset analítico de · 1§ 1 6 x ( 2 B 4 − a + ( A2 + B 2 ) x 2 ) a2 la hipérbola: 6 ( A2 + B 2 ) x 2 + x0 = ¨ x + d # − 4a − − c ¸ 2 2 2 ¨© d c · ¸¹ 1 §¨ 13 ( A + B ) 2 6 x4( 2 B 4 − a2 + ( A2 2 +2 B 2 ) x 2 ) 2 a2 2 2 6 ( A + B ) x6 x+( 2B − a + ( A + B ) x ) x0 = 1 § x + d # −c¸ 1 a− 4a −· (17) ¸ d x0 = 2 ¨¨©x + d # 3 ( A2 + B 2 )6 ( A2 + B 2 ) x 2 + − 4a − − c ¸ c (17) ¹ ¸ d c 3 ( A2 + B 2 ) 2 ¨© ¹ con a = B 4 − A2 r 2 + ( A2 + B 2 ) x 2 , b = 54 A2 B 2 ( A2 + B 2 ) r 2 x 2 , c = 3 a 3 + b + b (2a 3(17) + b) (17) 2 4 2 c) 2 2 2 2 22 2 2 2 A con r + +( A((2aA2+− +2B B2 +( AB22 )+rB2 x22),rc2 x=23, ac =+ 3b a+ 3 +b b(2+a 3 +bb()2a 3 + b) con aay==dBB4=−−AxA2 r + B )2 x)2 ,xb. ,=b54=A54 B2 ( A 3(A + B ) c (a− −c)c2) 2 ( a 22 yy dd == xx ++ 2 2 2 2 . . ( A + +B B) c) c 33( A 3 36 Revista EIA Se obtiene el offset de las hipérbolas suplementarias, si y solo si, el radio de corrección r es menor Se queobtiene el radio de curvatura del mínimo círculo osculador, es decir, el offset de las hipérbolas suplementarias, si y solo si el radio de corrección Se obtiene el offset de las hipérbolas suplementarias, si y solo si, el radio de corrección r resesmenor menorque queelelradio radio curvatura mínimo círculo osculador, es decir, dede curvatura deldel mínimo círculo osculador, es decir, B2 B2 Br 2A < r< A A r< (18) (18) (18) 2 §1§ ·· 1 6x (2B4 − a + ( A2 + B2 ) x2 ) 2a 2 2 2 ¨ §¨ x§+ d # ¸¸ 4 2 2 2 2 4a·− · A B x + + − − c 6 ( ) ¨ 2¨¨1 ¨ x + d # 3 ( A21+ B2 ) 6 ( A2 + B2 )x2 + 6x (2B − a + ( A +dB ) x ) − 4a − a − c ¸¸ c ¸¸ © ¹¹ ¸¸ d c 3 ( A2 + B2 ) z = ± A # A 1 + © ¨© 2 ¨© ¹¹ 2 z = ±A # A 1+ B B2 2 2 4 2 2 2 § § § § ·· · · a2 11 2xB(4 2−Ba +−( Aa2++(BA2 ) x+2 )B ) x )a2 2 ¨2 ¨ 1 ¨1 ¨ 22 2 2 2 26x (6 (19) ¸ ¸− ¸¸ 6 ( ) 4 d# A + B x + − a − − c 6 ( ) 4 # r #− r x−−¨ x − x ¨+xd+ # A + B x + − a − c 2 22 ¸ 2 ¸ d c ¨ © 2 ¨2 © B )) d 33( (AA ++ B ¹ ¹ c ¸¹ ¸¹ © © (19) (19) 2 de hipérbola una hipérbola realizado con ayuda la figura 3 se muestra un ejemplo del offset En la En figura 3 se muestra un ejemplo del offset de una realizado con ayuda de En la figura 3 para severificar muestra ejemplo del offset(19) de de una hipérbola realizado con ayuda de de software verificar la validez expresión (19), de mismamanera manera que efectuó software para la un validez dede lalaexpresión la la misma que sese efectuó software verificar la validez de la expresión (19) de la misma manera que se efectuó para parábola para lapara parábola yy la elipse. para la parábola y la elipse. Figura 3. Offset cóncavo y convexo de la hipérbola para z = A − A 1 + x 2 / B 2 con A = 200, B = 100, r = 5, sin considerar el sentido del maquinado. 2 Figura 3. Offset cóncavo y convexode delalahipérbola hipérbola para A =A200, Figura 3. Offset cóncavo y convexo para zz==AA−−AA 1 1++x x/2 B/ B con con = 200, B = B = 100, r = 5, sin considerar el sentido del maquinado 100, r = 5, sin considerar el sentido del maquinado. 2 Escuela de Ingeniería de Antioquia 2 37 Curvas paralelas explícitas de las curvas cónicas no degeneradas... 5. SOLUCIONES NUMÉRICAS La solución recurrente expuesta para el offset explícito de las curvas cónicas es mucho más simple que cualquier método con análisis numérico, ya que se reduce considerablemente el tiempo de cómputo y maximiza el acabado superficial usando interpolación fina de una etapa, en lugar de técnicas usuales como interpolación lineal segmentaria, interpolación circular segmentaria e interpolación circular usando elementos finitos (Aigner, 1997). Las soluciones presentadas permiten desarrollar software de alta calidad geométrica y numérica para efectuar la corrección de herramienta en el torneado CNC de superficies de revolución, con sección longitudinal correspondiente a una cónica no degenerada, para su uso en la fabricación de lentes y espejos asféricos. Los métodos de interpolación permiten producir la geometría especificando un error máximo ei predeterminado, que generalmente es inferior a 0,1 µm, magnitud inferior a la longitud de onda de la luz violeta. Existen circuitos integrados especializados para realizar interpolaciones de orden superior, como los fabricados por Toko en Japón, en especial para la parábola, usando técnicas de interpolación lineal segmentaria sin corrección de herramienta. Como los procesos de análisis numérico son por lo general extensos, se presenta a continuación un refinamiento de la interpolación circular segmentaria para el offset de una parábola. Procesos similares puede desarrollar el lector para cualquier geometría de orden superior. 5.1 Aplicación: Fundamentos matemáticos para la fabricación de moldes cóncavos con sección longitudinal parabólica Para la fabricación de un molde o un espejo correspondiente a un paraboloide de revolución con resolución y rugosidad total inferior a un cuarto de longitud de onda de la luz ultravioleta (λ/4 ≈ 50 nm) se requiere el siguiente modelo que segmenta una parábola en tramos circulares para compensar la geometría de corte, según el radio de la herramienta rh, utilizando usualmente un buril de diamante con radio (0,5 ±0,001) mm, con líneas de Fourier claramente continuas1, para tornear la superficie con control numérico computarizado CNC, con interpolación compilada de una sola etapa, ya que los procesos de interpolación multietapa interpretados generan pausas entre instrucciones de segmentación, si el control de la máquina no tiene feed-forward enclavado entre ejes, usando un husillo aerodinámico de mando directo, sin rodamientos y carros cartesianos con lubricación aerodinámica con superficies de apoyo de bronce sinterizado, para minimizar la vibración de la máquina y aumentar la eficiencia del proceso. Dicho modelo se basa en un refinamiento de la interpolación segmentaria (spline) lineal que se describe en la sección 5.1.1. 1 38 Las líneas de Fourier son causadas por la difracción de la luz en el filo, que indican su estado. Si las líneas de Fourier observadas bajo el microscopio con un aumento típico de 400x tienen cambios abruptos, es porque el filo de la herramienta está deteriorado en sus vecindades. Revista EIA 5.1.1 segmentaria lineal dede una parábola 5.1.1Interpolación Interpolación segmentaria lineal una parábola 5.1.1 interpolar sección longitudinal parabólica dada porpor la ecuación (1), tomando ParaPara interpolar la lasección longitudinal parabólica dada la ecuación (1), tomando el Interpolación segmentaria lineal de una parábola 5.1.1 Interpolación segmentaria lineal de una parábola elsigno signo positivo, se se procede a determinar el error la interpolación segmentaria lineal en el lineal en positivo, procede a determinar el de error de la interpolación segmentaria Para interpolar la sección longitudinal parabólica dada por la ecuación (1), tomando el pendiente del intervalo [a, b], el cual es máximo cuando la derivada es igual a la pendiente del el intervalo [a,sección b], ellongitudinal cual es máximo es tomando igual asegmento, Para interpolar la parabólicacuando dada porlala derivada ecuación (1), ella signo positivo, se procede a determinar el error de la interpolación segmentaria lineal en signo positivo, se procede a determinar eleserror demáximo la medio: interpolación segmentaria así, el punto donde error es máximo el es punto segmento, así, elelpunto donde el error es el punto medio:lineal en el intervalo [a, b], el máximo cuando la derivada es esigual del el intervalo [a, cual b], elescual es máximo cuando la derivada iguala alala pendiente pendiente del 1 segmento, así, el punto donde el error es máximo es el punto medio: segmento, así, el punto donde el error es máximo (20) x = (a es + bel) punto 1 medio: x = ( a + b) 2 1 2 1 x(=a +(ba)+ b) 2 x = El versor del 2 2 segmento es: del segmento es: El versor 2 2 2El versor del segmento es: El versor del segmento es: (20) (20) (20) ª º 4f (a º+ b) ªv = 4f (a, + b) ª v = « 4«f 22ab +2 a 2 + b2 2, + 16(af 2+ 2b) 22ab + aº22 »+ b 2 + 16 f 2 »(21) (21) 2ab + a + b + 16 f » ¼» ¬« + a + b + 16, f ¼»(21) v=« ¬« 22ab 2 2 2 2 2 2 ab + a + b + 16 f 2 ab + a + b + 16 f ¬« ¼» El deldel punto medio, es decir, vectorelsagital es:sagital es: Elvector vector punto medio, es eldecir, vector El vector del es punto medio, es decir, el vector El vector del punto medio, decir, el vector sagital es: sagital es: 1 ª1 º (1b − a) (13a + b)» v m = « 1(b − aª ), (22) º ª¬ v2 m = 1 (16 b1− a(), ((b3º − )bº()3ºa + b)» ¼a ) − + ), b a a ªv1m = ª«1 (b −1«¬ a ¼ +) (b3)a + b)» »¼ a()b(3−aa16 v m = v«m =(b«−¬ 2a(),b − a2),(b −16 (22) (22) 2 ¬2 16 16vectorial de »¼los vectores: ¼ El error se define como la ¬norma del producto (21) (22) El error se define como la norma del producto vectorial de los vectores: 2 El error se define comoseladefine normacomo del producto de a )vectores: (b los −vectorial El error la norma vectorial del producto de los vectores: [v, 0]× [v m , 0] = 2 2 4 2ab + a 2 + 2 b + 16 (bf − a ) 2 2 (23) [v,v,[0v0,]]×0×][[×vv[mv,,m00,][]0v]=,=0=]× [v m , (0b](b−2=−a )a4) 22ab + a22 + b 2 + 16 f 2 (23) [ m 4 2máxima ab + a2 2de+una b2 2 cuerda + 16 2f 2al arco, define el radio La sagita s de un círculo, o sea, la distancia (b − a2) 2ab+ +a a + +b b ++1616f f 4 42 ab sagital ρs como: (23) (23) s de un círculo, o sea, máxima la distancia máxima de una cuerda al define el radio La sagita sLa desagita un o sea, la distancia de una cuerda arco, define el arco, radio un círculo, o sea, la distancia dealuna cuerda al arco, define el La círculo, sagita s de (l 2 / 4 + s 2máxima ) como: sagital ρ s ρ s (d , s) = (24) sagital ρradio s como: sagital r como: 2s s 2 2 2 22 2 2 (l / 42 +(ls /)4++()sl−s)z/)(4a,f+))s2 donde l es la magnitud de laρcuerda = (d , sρ) =((lb,−sρ)a)=((d+l ,(s/z)(4b,f 2 s ρ s s( l , s) =s 2s 22s s ) 2s (24) (24) (24) 2 2 Construyendo función para donde l es la magnitud de ladecuerda (labcuerda: −cuerda a)= + ( z((b(b,f )(2b,f donde es launa magnitud de la b−−a) )− a2)z+2(a,f +( z((z)b,f z (a,f ) −) z−(a,f )) 2)) donde la lmagnitud la cuerda es l (b − a ) 2 c(a, b, f ) = a + 2ab + b 2 + 16 f 2 4f Construyendo unalafunción Construyendo una función para cuerda:para la cuerda: (25) Construyendo una función para la cuerda: Así se puede obtener el radio de interpolación sagital entre dos puntos a y b c(a, b, f ) = 2 (b − a ) 2 (b − a ) 2 2 c(4a,fb, f )a= + 2ab + b a+2 16 + 2f ab + b 2 + 16 f 2 4f Denominación usada a principios del siglo XX para definir un vector unitario. Así se puede obtener el radio de interpolación sagital entre dos puntos a y b (25) (25) (25) Así se puede obtener el radio de interpolación sagital entre dos puntos a y b 2 2 Denominación usada a principios del siglo XX para definir un vector unitario, cuyo empleo debería rescatarse. Denominación usada a principios del siglo XX para definir un vector unitario. 2 Denominación usada a principios del siglo XX para definir un vector unitario. Escuela de Ingeniería de Antioquia 39 Curvas paralelas explícitas de las curvas cónicas no degeneradas... Así se puede obtener el radio de interpolación sagital entre dos puntos a y b a 4 + 4a 3b + 6a 2 (b 2 + 6 f 2 ) + 4ab (b 2 + 14 f 2 ) + b 4 + 36 b 2 f 2 + 256 f 4 ȡs (c ( a, b, f ), e( a, b, f )) = 4 3 2 2 2 a + 4a b + 6a (b + 6 f )32 + 4fab a (b22 ++ 14 f 2+) +bb2 4++16 36 fb 2 f 2 + 256 f 4 2ab (26) ȡ (c ( a, b, f ), e( a, b, f )) = s 32 f a 2 + 2ab + b 2 + 16 f 2 a 4 + 4a 3b + 6a 2 (b 2 + 6 f 2 ) + 4ab (b 2 + 14 f 2 ) + b 4 + 36 b 2 f 2 + 256 f 4 ȡslo (c (anterior a, b, f ), e( a, b, define f )) = con el radio radiototal: total:32 f con lo anteriorse se define el (26) a 2 + 2ab + b 2 + 16 f 2 con lo anterior se define el radio4 total:3 2 2 a + 4a b + 6a (b + 6 f 2 ) + 4ab (b 2 + 14 f 2 ) + b 4 + 36 b 2 f 2 + 256 f 4 ȡ s (c ( a, b, f ), e( a, b, f )) = 2 2 2 2 2 con lo anterior se define el (radio b 2 +f 16(fab 2f a f + 2 2 − 16 f ) a + b2total: ) 2 (( a +2 b) 2 32 + 36 )ab−2 +16 36 f ) − 16 f ( ab − 16 f ) ρρ ((aa,,bb,a, f f+) )4=a=(ba++6ba )(b(( a+ 6+fb)) ++4ab 2 (b + 14 f )2+ b + 36 b2 f + 256 f 4 3 2 2 2 2 2 4 2 ++b16)f f +2( ab 16−f16 f ȡs (c ( a, b, f ), econ ( a, blo , fanterior )) = a +f(ba)) − se define ( a + b) ((radio a 32 + bff32 ) a+2f(+36 32 2ab + b 2 16 + 16 f ρ ( a , b, f ) = 22 total: el2 2 2 2 2 22 2 2 2 ) 4 (26) (26) (26) (27) (27) (26) (27) (27) 322 f ( a +2 b) + 162 f enelellímite límite cuando cuando bb==a a+ + ΔxΔyx(hallando límite tiende atiende 0:− 16 fa20: ay +hallando b) ((ela (27), + el b) límite +cuando 36 fcuando )Δ−x16 f Δ2 (xab ) con loenanterior se define radio total: Como prueba delρel acierto de la expresión en el límite, cuando b = a + Dx y hallando ( a , b, f ) = (27) 2 2 2 f ( a + b) + 162 f a 0:2 el el límite cuando en límite cuandoDxb tiende = a + Δax y0:hallando el 32 2límite 2cuando Δ2x tiende 1 16 f (16 f − a ) 2+24a (4a +2362 f 2) ȡ(a,a +bΔ)x2,((f)a=+ b ) 22 1+ 3616f 2f )2 − (16 a ) +2− 416 a f(4)a + 36 f 2 ) (28) ( a + 16f 2f −( ab Lím + Δ x , f) = (28) 32 f ,límite ρ (ena,elbLím Δxf→)0 = ȡ(a,a 4 a + 16 f 2 2 2 2 2 (27) cuando b = a + Δ1x y2 hallando tiende 2 f ) a 0: 162f (16 fel − a ) + cuando 42 a (24a Δ+x36 2 límite Δx → 0 ȡ(a,a + Δx, f) =32 f32 f( a + b ) + 16 f 4a + 16 f (28) (28) Lím 32 f 2 →0 4a 2 +2 16 f 2 2 2 2 2 se obtiene alΔxsimplificar el radio de curvatura f 1 16 f (16 f − a ) + 4a (4a + 36 ) ȡ(a,a + Δx, de f)el=curvatura (28) obtiene al simplificar elhallando radio 2 cuando Δx tiende en el se límite cuando b = aLím + Δ x y límite a 0: 2 2 32 f Δx → 0 el radio de curvatura 4 a + 16 f se obtiene al simplificar 1 ρ =curvatura: (a 2 + 4 f 2 ) 3 (29) Se obtiene al simplificar el radio de 2 24 f 2 2 2 2 1 2 2 3 16 f ρde(1= 16 f −2 a )(a + 4a (4a + 36 f ) se obtiene al simplificar1el radio curvatura (29) ȡ(a,a + Δx, f) = (28) (a2 2 + 24 f 2+)23 43 2f ) (29) 2 ρ= 12 f 4 32 f (29) = 4 f 2 de (a4una f )f 0 a+ 4+parábola 16 5.1.2 Δx → Interpolación segmentariaρ circular 1 4f ρ= f 2 )3 (a 2 + 4 (29) 2 4 funa 5.1.2al Interpolación Interpolación segmentaria circular de 5.1.2 segmentaria deparábola una A continuación se describe el circular procedimiento paraparábola calcular las coordenadas del se obtiene simplificar el radio de curvatura a+b a+b 5.1.2 5.1.2 Interpolación segmentaria circular de una parábola z( , f ))del centro del círculo que pasa por los puntos (a, z(a, f)),de (b,una z(b,parábola f)) y ( las ,coordenadas : Interpolación segmentaria circular A continuación se describe el procedimiento para calcular A continuación se describe para calcular las 1 el procedimiento 2 2 coordenadas del 2 2 3 ρ= (a + 4 f ) a+b a + b (29) 2 b , f ))a :+centro b del , za(las+ coordenadas centro del círculo que pasa por se los2 describe puntos (a, z(a, f)), (b, z(b, f)) y ( calcular 4elf procedimiento A continuación para A continuación describe para las coordenadas 2el procedimiento 2calcular ( centro del círculo que se pasa por los puntos (a, z(a, f)), (b, z(b, f)) y 2 2 , z (del ρ = ( a − h) + ( z ( a, f ) − k ) (30) , f )) : a + b2 a + b2 la circunferencia queque pasa por (a, , z( , f )) : centro del segmentaria círculo pasa porloslospuntos puntos (a,z(a, z(a,f)), f)),2(b, (b,z(b, z(b,f)) f))yy ( 5.1.2 de Interpolación circular de 2 2 una parábola 2 2(31) 2 2 2 ρρ == ((ab −− hh)) ++ ((zz((ab,, ff )) −− kk )) (30) Lím ρ = 2(a − h) +2 ( z (a, f ) − k )2 (30) yA continuación se describe 2 el procedimiento 2f 2) − k ) las coordenadas del ρ−hh=))22(a+ −( zh()ba,,+fpara ())z−(−akk,)calcular (30) ρ 2=a=(+a(bb− (31) (30) ρ f ) a+b 2 a + b a+b ρ 2puntos = ( 2 (a, ) 2 +f)), , z( , f ))(32) centro ydel círculo que pasa por los : ρ2 =ρ−2(b=hz(a, − h)(2z (+2(b, (2zz(b, (b, ,f f)f)) )− −ky)k()22 (31) ( b − h ) + ( z ( b , f ) − k ) (31) 2 2 a + b a + b 2 2 2 y ρ =( − h) + ( z ( , f ) − k) (32) y 2 2 2 simplificando las ecuaciones2 ρ (30), (31) se tiene 2ba−2+yhb(32) 2 f )que: 2 = ( ) + ( z ( b , − k ) (31) ρ =ρ (2a=ρ−(2h=) (+a (+z−b(ah−,)h2f)+ )2 −+( zk((z)(aa++bb ,, ff ))−−kk) (30) 22 ) (32) (32) 4 2 2 2 2 2 2 2 2 2 simplificando las ecuaciones (30), (31) y (32) se tiene que: a + 8 a f ( 2 f − k ) − 32 af h + 16 f ( h + k ) ρ2 = 2 (33) y ρ = (b − h) 2 + ( z (b16 , f f) 2− k ) 2 (31) 4 2 (30), (31) y (32)2se tiene que: 2 2 2 simplificando las ecuaciones a + 82 (30), a f a(2+(31) fb− k y ) −(32) 32afseah+ +b16 f que: (h + k ) tiene y simplificando las ecuaciones (32) ρ2 = (33) ρ =( − h) 2 + ( 2z ( , f ) − k )2 4 2 2 2 2 2 22 16 f 4 2 2 2 2 2 a + b a + b b2 + 8b f ( 2 f −2 k ) − 32bf hf32 16 h f+2(k h )2+ k ) 2 )+af −af k2)hf2 +(16 (32) (34) ρ 2 = ρ2 =ρ(a2 4=+a8−a+h28)fa(+2f(f(z2(−f k−)k2−) ,−32 (33) 2 h + 16 f ( h + k ) 2 2 16 f 2 16 f2 ρ4 = 2 (33) 2 2 2 b + 8b f ( 2 f − k ) − 32bf 16h f+ 16 f ( h + k ) yevaluando el sistema y (32), se tiene que: ρ 2 = de las ecuaciones (30), (31) (34) 2 2 2 2 simplificando las ecuaciones (30), (31) y (32) se tiene que: b 4 + 8b 2 f ( 2 f 16 − kf ) − 32bf 2 h + 16 f 2 ( h 2 + k 2 ) 2 ρ = 4 2 2 2 2 2 (34) y 2 32 bf f 2f 2h(h+2 16 2 4 b (33) + 8a+2 8f b (2 ff −( 2k )f −−32kaf) − h16 + 16 + k f2 ) ( h + k ) 2ρ a = (34) ρ = (33) 2 y 16 f 2 16 f y b 4 + 8b 2 f ( 2 f − k ) − 32bf 2 h + 16 f 2 ( h 2 + k 2 ) ρ = 16 f 2 2 40 y (34) Revista EIA ρ2 = ( a+b a+b − h) 2 + ( z ( , f ) − k )2 2 2 (32) simplificando las ecuaciones (30), (31) y (32) se tiene que: ρ2 = y ρ2 = a 4 + 8a 2 f (2 f − k ) − 32af 2 h + 16 f 2 (h 2 + k 2 ) 16 f 2 (33) b 4 + 8b 2 f ( 2 f − k ) − 32bf 2 h + 16 f 2 ( h 2 + k 2 ) (34) (34) 16 f 2 y 4 2 2 3 2 a 32ba+2 (23ab22(+ 3b32 +f 32 + 16 f 2 h)... a 4 +a4a+3b4+ −f16−fk16 ) +fk4)a+(b43a+(b16bf (2bff (−2kf) − k64) −f 264 h)... 2 ρ =ρ = 2 a 4 + 4a3b + 2a 2 (3b 2 + 32 f 2 − 16 fk ) + 4a(b3 + 16bf (2 f − k ) − 64 f 2h)... 4 3 2 2 2 3 2 2 ρ2 = ρa =+ 4a b + 2a (3b + 32 f − 16 fk ) + 4a (b + 16bf (2 f − k ) − 64 f h)... 4 2 2 2 2 2 +b4 232 b(22bf2 (f−2(2kf f)−− kk256 )) − 256 h++256 256 ... + ... b 4+... +b32 f32 bf hbfbf+2 h256 f 2f(h2 f(2h+2(h k k2 )+ 2 k ) + b + − − 256 + ) 2 2 2 2 ... + b 4 + 32b 2 f (2 f − k 256 ) − 256 256 f 2bf ff 2h2 + 256 f (h + k ) 256 (35) (35) (35) (35) (35) 256 f22 4 3 2 2 a + 4 a b + 2 a ( 3 b + 32 f − 16 fk ) +34a (b3 + 16bf (2 f − k ) − 264 f 2 h)... 4ρ = 3 2 2 2 Resolviendo el sistema las últimas ecuaciones yhk)... se obtiene: Resolviendo últimas h) h−y64 obtiene: Resolviendo detres tres ykh kfse se obtiene: a +el4asistema b +el 2asistema (de 3b las +de 32 flas−tres 16 fkúltimas ) + 4ecuaciones a (becuaciones + 16bf (2para f para − kpara ρ 2 = Resolviendo h y k se obtiene: sistema las tresecuaciones últimas ecuaciones Resolviendo el sistemaelde las tresdeúltimas para h y kpara se obtiene: (35) 2 ... + b 4 + relativa 32b 2 f (2 fdel − k centro ) − 256bfdel h +segmento 256 f 2 (h 2 + k 2la ) interpolación circular (35) La coordenada de enenx xcon 4 relativa 2del del 2 2 La La coordenada centro segmento circular coordenada centro deinterpolación la interpolación circular encon x con ... + + 32relativa b 2relativa f (2 f del − k )del − 256 bf del hf 2+segmento 256 f segmento (segmento h 2 +dekde ) la 256 Lab coordenada relativa del centro del de la interpolación en x con La coordenada del centro la interpolación circularcircular en x con respecto al punto (a, z(a, f)) es 2 respecto al punto (a, z(a, f)) es respecto al punto (a, z(a, f)) es f respecto al punto (a, (a, z(a,z(a, f)) 256 es respecto al punto f)) es Resolviendo el sistema de las tres últimas ecuaciones para h y k se obtiene: 3(a +3b) 3 +3 4ab(a + b) 3 Resolviendo el sistema de las tres últimas3h3(ecuaciones para h = (aa++3b()ba)+++ 4) ab a) obtiene: + b) 4b ab (+ af (2+4ayab b+ )k (bse 128 = segmento hh == hdel La coordenada relativa del centro de la interpolación circular en x con 2 2 2 (36) 128 f interpolación 128 f 2 la 128 f respecto alrelativa punto (a, f)) esdel segmento La coordenada delz(a, centro de circular en x con (36) (36) (36) 7(a + b) − 4ab k = b) 2 −2 4ab +2f respecto al punto (a, z(a, f)) es 7(ba)32 +−b)422ab −24fab kk == 77((aa++ 3 f + + (36) k 3=(a + bf )2 +2 4ab2(a + b2) f+ 2 f h = 332 32 f 2 32 f 128 3(a + b) + 4ab (af+ b) h = circular será de lo cual el radio del segmento (36) 22 igual a: 7será (128 a + igual bf ) − 4a: ab de lo cual el radio del segmento circular (36) 2 k = + f de lo cual elelradio del circular seráigual igual a: a: radio delsegmento segmento circular será dedonde lo cual el radio del segmento circular será igual f 2 a: 2 7(a + b) 2 −32 4ab k= + 2 f § a2 · ȡ32 = f 2(a − h§) 2a+2 ¨¨ · 2− k ¸¸ (37) 2 de lo cual el radio del segmentoȡ circular = (a −será h) 2 igual + ¨ a:©−24kf ¸ 2 2¹ (37) 2 ¨ § a §¸ · · ȡ =será −(ha)a:2−©+h4¨¨) 2f + ¨−¹ak ¸¸− k ¸ (37) (37) ȡ (=aigual (37) de lo cual el radio del segmento circular ¨ ¸ 4 2 f 4 2f ¹ © © ¹ § · y sustituyendo las ecuaciones (36) en (37) se obtiene a = (ase− obtiene h) 2 + ¨¨ 2− k ¸¸ (37) y sustituyendo las ecuaciones (36) enȡ (37) 2 ©4f ¹ §a · 2 2− k ¸ ¨2 obtiene ȡ = en − h) + (37) 2 (a (37) y sustituyendo las (36) 2 en (37) y ysustituyendo las ecuaciones (36) se § 1 ecuaciones §¸¹ § 3a 3 + 13a 2b + 13ab 2 + 3b23 · · § 7a 2 + 10 f· obtiene 4·obtiene a 2 ecuaciones ab(36) + 7ben +(37) f2¨©se 64se sustituyendo las ¸ ¸ ¸ + ¨ a −3¨ 2 2 2 ȡ§ =1 a¨¨2 § 7las (38) y sustituyendo en (37) se obtiene a−2¨¨ecuaciones + 10ab + 732 b(36) abf22+ 3b3 · · ¸¸ ¸ f+264 f ·¸ ·¸ +¸¹§¨¸¹a − ¨©§¨ 3a ¨©+ 13a b + 13 128 ¸ ¸ ¹ ȡ = ¨¨ © 4− ¨¨f © (38) ¹ 2 2 2 ¸ 2 ¨ ¸ 2 2(37) 2se obtiene 2¹ ¸ 2 ¨ 2 © 2 ¹¸ 2 3 f §2ecuaciones 32+f7en 128 y sustituyendo (36) 2 ab 3 2f b + 13 2 © 2a§2 7+a10 ¹· · 2 ©· ·§ §§ 33a 3§+313 § 1©a§421las 2¹3b · · 3 b + f 7 64 · · 2 + 10 2b 2 f 2 a 2 bab 3 + a ab + + a + a + ab + b 7 64 13 13 3 ¸¸ ¸¸ ¸(38) ȡ = ȡ ¨¨= ȡ ¨= −§¨ 1¨¨ a− ¨− §¨ 7a + 10ab2+ 7b + 64 f ¸¸·¸¸¸·¸ ++¸§¨¸¨¨aa−+−§¨¨3¨¨aa −+¨13a b + 13ab +2 3b ·¸ ·¸ (38) (38) (38) para4 llegar (b, 2 z(b, f)) y repetir Así, el segmento circular 2 2 ¨ ¨ final ¨ 128 128 ¸¨¸© ¨el ¸ ¸¸ ¨f 4 ¨ f4© alf punto ¨© proceso. 2 f f 32 2 ¹¸¹¸ 2f ¸ ¸ f 32 128 ¹ f f 32 © ¹ 2 © punto ©+©13a 2b© + 13 para explícito llegar final repetir Así, circular ¹ ¹ § 1 ©a al §¹ ¹ ¹§©¹3ela 3proceso. del está determinado § 7offset a 2©+©10 ab +(b, + 64f)) f 2 ·y·por ab 2el+ 3segmento b3 · · ¹ ¹ 7b 2z(b, ¸¸ ¸¸ + ¨¨ a − ¨¨ ¸¸ ¸¸ ȡ = ¨¨ del offset − ¨¨ está determinado (38) 2 2 explícito por f © 32 f 128 f ¹ ¹ y ©repetir © el proceso. ¹ © 4 llegar 2 para al punto final (b, z(b,f))f)) Así,Así, el segmento circular circular parapara llegar al punto final (b, z(b, y repetir el proceso. el ¹segmento 7 ( ) 4 a b ab + − llegar al punto final (b, z(b, f)) y repetir el proceso. Así, el segmento circular para llegar al punto final (b, z(b, f)) y repetir el proceso. Así, el segmento circular explícito 2 zexplícito f + = 2 del 2 offset está determinado por 7(a del 4ab + b) offset −32 foffset explícito está determinado por explícito del está determinado por 2 z f = + del offset está determinado por para llegar al punto final (b, z(b, f)) y repetir el proceso. Así, el segmento circular 32 f 2 2 2 2 2 §7(aoffset · explícito del 4ab determinado + b) 2 2− está 2 2 por 2 § 3a 3 + 13a 2b + 13ab2 + 3b3 · · 2 ¸ § 3a 3 + 13a 2b + 13ab2 + 3b3 · z 2= ¨ § 1 a 2 § 7a + 2+f 10ab + 7b + 642f · · § 2 ¨ ¸ ¸ 2¨ 32 f − 2 ¸ ¸ ¨ ¸ ¨ ¨ a r x 7(a +7§−b(a)§+−¨b4)2ab ± − − + − · 2 2 2 2 2 ¸ 47fab · §¸ ¸ ¨ 3 ¨ 3b3 · ab2f +2 3b3 · · ¸¹ ¸¹¸ § ¸¸ 3¨©a 3 + 13a 2b + 13 ab2f + 2a 2f +¨©+10 z = z = ¨ ¨ 122¨ a ¨© − 4§+ 128 ¹ 2 ab f + 72b32+f 64 f ·¸¸ ¸ + ¨¹ ¹a − §¨¨©3a +© 13a b + 13128 ¸¸ ¸¸ ¸¸ ± r ¸2 − ¨¨ ¹x − − 7(a¨32 −2 ¨¨ + b¨f) ©− 4ab 2 2 ¨ ¸ 2 2 2 § f f § ©+ 22 f ·¸ © z = ¨ © 432 32 f 128 f f 2 § 3a 3 + 13a 2b128 1 a § 7a 2 + 10ab + 7b 2 + 64¹f¹2 · · © § © § 3a 3 + 13a 2b + 13ab2 + 3b3 ¹·¹· + 13ab2 + 3b3 · ¹ ¨ ¨ © 32 − f −¨ ¸¸ + ¨ a − ¨ ¸ ¸ ¸ ± r ¹ − ¨ x −2 ¸ 2 2 2 ¸ ¸¸ ¸2 ¨ · ¨ ¨ 2 2¸ ¸ 32 128 § §§ 2 ¨¨ ¨© 4 2f ¨© 2 f 2 2 f 2 ¹¹2 3 ¸ 2 3 2 ¹2 2 © 2 § · 1283 f (39) ¹ ¹ ©2 §© 3 3 b2 + 13 2· 3 2 2ab + 7b + 64 2 f 2 ·· 2 § 3a b + 13 2 ab2 + 3·b2 · ·¹ 3 3a 2 §+313 3 13 3 + + a a ab b ¨ § ¨¨1§ a§ 21© a§ 27a2§+710 ¸ § · · 2 + 7b2 + 64¸f 3 2 3 3 2 2 3 · § · 10 13 13 3 3 13 13 a ab a a b ab b + + + + + + a a b ab ¸¸+ 3b ·¸ − ra¨¨ ¸xb−+−13 − −¨ ¨ ¨ ¨ 1 ¨a − ¨¨§ 7a− ¨+ 10ab + 7b 2 + 64 f · ·¸ ¸¸ §¨¸ +¸§¨¨¸3aa−++¨¨¨13 a−b¨ + 13ab + 3b2 · · + 3b · ab ¸ ¸¸§¸¸ ±3¸ar¸¸+ 13 2 ¨ a x ± − (39) ¸ de manera recurrente ¸ ¸ ¨ ¸ ¨ ¨ a r x ± − − + − − ¨ ¨ que − 2 32 f 128 f 128 f 2 ¸ ¸ ¨ f 2 128 f 128 ¨4¨ 4 f¨f4 ©¨f ¨ ¸ f ¨2 ¸ (39) ¸ ¸ f 2 ¸ ¹¨¹ ¸ ¸¸ ©128 ¹ 32 f 2 32 f ¸¹ ¸¹ ¹ ¨©¹ ¹¨©©¸¹ ©¨© 128 ¨© manera ¸ (39) ¸ © ¹ ¹¹ © recurrente ¹ ¹ ¹¹ © © © © ¨© ©de que © © ¹ z = k − (ρ ± r ) 2 − ( x − h) 2 ¹ (40) 2 2 que de manera recurrente z = k − (ρ ± r ) − ( x − h) (40) z = k − (ρ ± r ) 2 − ( x − h) 2 (40) (39) (39) (39) variando a y b hasta completar la trayectoria desde x = a0 hasta x = 0. que de manera recurrente queque de manera a y recurrente b hasta completar la trayectoria desde x = a0 hasta x = 0. de manera recurrente Escuelavariando de Ingeniería variandode a yAntioquia b hasta completar 41 z = la k −trayectoria (ρ ± r ) 2 desde − (x − ) 2 a0 hasta2 x = 0. (40) 2 xh= z = kz −= k (−ρ ± (rρ) ±−r )(2x −− (hx) − h) 2 variando a y b hasta completar la trayectoria desde x = a0 hasta x = 0. x = 0. variando a y ba hasta completar la trayectoria desde x = ax0=hasta x = 0. variando y b hasta completar la trayectoria desde a0 hasta (40) (40) Curvas paralelas explícitas de las curvas cónicas no degeneradas... que de manera recurrente z = k − (ρ ± r ) 2 − ( x − h) 2 (40) variando a y b hasta completar la trayectoria desde x = a0 hasta x = 0. ai = ai −1 + ∆x bi = ai + ∆x 6. (41) RECOMENDACIONES TÉCNICAS Se debe considerar también que en el proceso de torneado de superficies cónicas de revolución, con buril de diamante, el maquinado debe efectuarse en el cuadrante apropiado, para que los tornillos de bolas recirculantes del torno CNC estén sometidos a esfuerzos de tracción, y así obtener mayor rigidez, cuando se efectúa el avance del buril, desde la periferia hasta el centro. Además, la altura del filo de corte de la herramienta, sin ángulo de ataque, debe tener un acierto con relación al eje de revolución de husillo, inferior a 0,001mm, posicionando la herramienta, si es posible, mediante el uso de una cámara de video con aumento de 100x. Siempre debe usarse, si se requiere acabado espejo, un husillo aerodinámico. Está demostrado experimentalmente que cualquier velocidad del husillo superior a 6000 r. p. m. no tiene incidencia sobre el buen o mal acabado superficial. El avance es el parámetro con más influencia en el buen acabado. Es preferible usar velocidad de avance radial constante, para maximizar la estabilidad dimensional del sistema de control. Para maximizar el acabado se recomienda una pasada de corte con profundidad de preacabado 0,1mm y una pasada con profundidad de corte de acabado 0,05 mm, y así minimizar las vibraciones inducidas por el corte regenerativo. En moldes se recomienda usar aleaciones de níquel-titanio por su alta maquinabilidad o acero inoxidable premaquinado y templado AISI420-54Rc puro o modificado, si se usan herramientas de cermet. También existen en el mercado local otros aceros de fácil adquisición especiales para la fabricación de moldes para lentes. En lentes plásticas con mecanizado directo, se puede usar PMMA (polimetilmetacrilato) y sus copolímeros, como N-hidroxietilmetacrilato y flurocarbonacrilato; también se puede usar policarbonato. En el mecanizado directo de espejos se puede usar aluminio prodax de alta resistencia y pureza, al final, se endurece la superficie para maximizar la vida útil, dar resistencia al rayado y a la corrosión atmosférica o para fabricar espejos fríos (cold mirrors). 7. CONCLUSIÓN Es válido concluir que es mucho más fácil usar el offset explícito de una curva cónica no degenerada que un método de interpolación con análisis numérico, para los procesos de manufactura de lentes y espejos, ya que los cálculos son más simples y más rápidos; y si para la parábola es más complejo el offset numérico será aun más complejo para la elipse y la hipérbola, ya que se involucran muchos radicales enclavados. 42 Revista EIA Notación A a B b f h k l r r rs s x z Semieje mayor de una elipse o una hipérbola Abscisa de partida Semieje menor de una elipse o una hipérbola Abscisa de llegada Distancia focal de una parábola Abscisa del centro de curvatura Ordenada del centro de curvatura Longitud de una cuerda Radio de curvatura Radio de corrección o distancia de paralelismo Radio sagital Sagita Abscisa cartesiana Ordenada cartesiana bibliografía Abłamowicz, R. and Liu, J. (2006). On the parallel lines for nondegenerate conics. http://arxiv.org/ PS_cache/math/pdf/0602/0602248v1.pdf. Kincaid, D. y Cheney, W. (1994). Análisis numérico. Addison-Wesley Iberoamericana. Aigner, K. (1997). Symbolic computation of and with offset curves. http://citeseer.ist.psu.edu/cache/ papers/cs/2577/ftp:zSzzSzftp.risc.unilinz.ac.atzSzpubzSztechreportszSz1997zSz97-21.pdf/aigner97symbolic.pdf. Escuela de Ingeniería de Antioquia 43