Variable Route Expiration Time Based on a Fixed Probability of
Anuncio

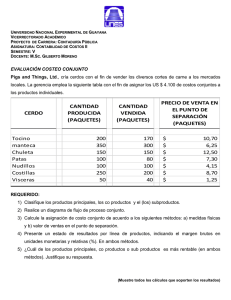
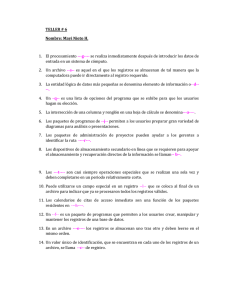
IEEE LATIN AMERICA TRANSACTIONS, VOL. 13, NO. 1, JAN. 2015 Variable Route Expiration Time Based on a Fixed Probability of Failure for Ad-Hoc Networks Routing Applications M. Rios, Senior Member, IEEE Abstract— In reactive routing algorithms on Ad-Hoc networks, one of the most important challenges is to minimize the number of route discovery processes, due to their high cost in bandwidth. This is achieved through a careful selection of the expiration time, i.e. the time each node keeps active the current route. Most implementations use system-wide random or arbitrary values for this parameter, even though the failure probability of a route depends of its size. Thus the use of a fixed expiration time is not necessarily efficient, and a variable allocation of expiration times for routes, according to their size, is proposed by introducing the VTOA (Variable Time Out Allocation) method. VTOA can be applied to any Ad-Hoc routing algorithm. In particular, an implementation of this method on the AODV algorithm is presented. The results obtained by simulation show VTOA improves the network’s performance, both in terms of the routing overhead (8.5% lower) and average end-to-end delay (21.3% lower), when compared to the original AODV, while other indicators, as the packet delivery fraction, remain the same or are slightly better. Keywords— Ad-Hoc networks, Ad-Hoc On-Demand Distance Vector, Ad-Hoc routing, Expiration Time Allocation. U I. INTRODUCCION LTIMAMENTE, la demanda de las tecnologías inalámbricas ha experimentado un aumento considerable. La necesidad de una comunicación en cualquier momento y en cualquier lugar ha impulsado el desarrollo de las redes híbridas, que interconectan redes de diferentes topologías y plataformas, siendo uno de los principales desafíos para las redes 4G. Un tipo particular de redes inalámbricas son las redes MANETs o Ad-Hoc. Estas son redes temporales, que se conforman de una manera aleatoria y autónoma. Se componen de un conjunto de nodos móviles y que no tienen una topología fija [1], [2] y [3]. El enrutamiento en este tipo de redes plantea grandes desafíos. A diferencia de otros tipos de redes inalámbricas, estas redes se enfrentan a problemas importantes de escalabilidad, en primer lugar debido a su naturaleza móvil y, en segundo lugar, debido a la imposibilidad de implementar una organización jerárquica compleja de la red, ya que tales redes no tienen una topología fija. Además, a diferencia de otras tecnologías inalámbricas (telefonía celular, WLAN, etc.), en estas redes los nodos deben ser capaces de retransmitir paquetes a través de rutas con varios saltos. Los algoritmos de enrutamiento para redes Ad-Hoc fueron desarrollados inicialmente sobre la base de los algoritmos tradicionales que se utilizan en las redes de cable (como M. Ríos, Pontificia Universidad Católica de Chile, and National Research Center for Integrated Natural Disaster Management CONICYT/FONDAP/15110017, [email protected] Vector de Distancia y Estado del Enlace). Actualmente existen dos familias principales de algoritmos: algoritmos proactivos o determinados por tablas y algoritmos reactivos o de demanda. Las ventajas y desventajas de estas dos familias han sido intensamente investigadas [4]. Los algoritmos proactivos [5] constantemente mantienen rutas hacia diferentes destinos en la red. Con el fin de mantener la información actualizada de las rutas, se envían periódicamente mensajes de control, lo que puede resultar en un uso excesivo del ancho de banda, que es un recurso muy limitado en el ambiente inalámbrico. También, en redes de gran tamaño y con movilidad, es difícil que estos algoritmos de enrutamiento converjan a rutas factibles. Además, el funcionamiento ininterrumpido del algoritmo genera transmisiones, retransmisiones, y procesamiento de paquetes en forma continua, lo que utiliza ineficientemente la energía limitada de los dispositivos de la red [13]. Por otro lado, los algoritmos reactivos [4] usan la red sólo cuando el tráfico de datos se requiere. Con el fin de obtener información de la red, los nodos realizan los procesos de descubrimiento de rutas, sólo cuando es necesario transmitir datos y no se tienen rutas activas disponibles hacia el destino. De esta manera, se evita el uso de ancho de banda y energía, pero con un costo de mayores retardos, debido a los procesos de descubrimiento de ruta. El proceso de descubrimiento de ruta en los algoritmos reactivos se realiza a través de un ciclo de petición/respuesta de ruta, en el que el nodo de origen inunda la red con paquetes de solicitud lo que es altamente ineficiente. El problema de la inundación ha sido ampliamente definido y estudiado [14]. En cada proceso de inundación, debido a la naturaleza inalámbrica del sistema, una gran proporción del ancho de banda utilizado se desperdicia. Esto ocurre debido al intercambio de información repetida y la zona de la disminución de la cobertura adicional de que cada nuevo paquete retransmitido produce. Además, hay un uso ineficiente de la energía en la retransmisión y el procesamiento de paquetes repetidos. Por último, en las redes de alta densidad, este proceso presenta conflictos en la capa de enlace de datos, que se manifiestan a través de acceso al canal y colisiones. Todos estos problemas han motivado esfuerzos de investigación, con el fin de desarrollar métodos más eficientes de descubrimiento de ruta [10], [11]. La optimización del proceso de descubrimiento de ruta ha sido estudiada desde diferentes perspectivas. Se han propuesto sistemas de inundación limitada. Otros procesos utilizan distintos criterios para la decisión de retransmisión de paquetes [16], [17]. Otros métodos se basan en una inundación selectiva u orientada. Otras estrategias se basan en evitar procesos innecesarios de búsqueda. Estas estrategias han 383 384 desarrollado extensiones de trayectoria múltiple de enrutamiento y métodos para la reparación y mantenimiento de ruta [4]. Debido a la naturaleza móvil de estas redes, el proceso de descubrimiento de ruta asigna un tiempo de expiración limitado para cada ruta posible, luego de lo cual la ruta se desactiva. Una selección correcta de este parámetro es fundamental para el uso eficiente de la información obtenida. Si el tiempo de expiración es demasiado corto, el proceso desactiva rutas que pueden ser probablemente todavía factibles de utilizar. Por otro lado, si el tiempo de expiración es demasiado largo, es probable que en el futuro cercano el algoritmo de encaminamiento trate de usar rutas con enlaces caídos, produciendo la pérdida de información debido a paquetes que se descartan. En ambos casos, el tiempo de expiración o el defecto de rutas, activa un nuevo proceso de descubrimiento en el nodo. La selección de un tiempo de expiración óptimo es un problema que no ha sido bien explorado en la literatura. La mayoría de los investigadores utilizan valores aleatorios para este parámetro. Hay estudios que determinan, de forma experimental, el comportamiento de las diferentes medidas de desempeño relacionadas con el tiempo de expiración de ruta [7]. Los resultados muestran diferencias de hasta un 50% en la fracción de entrega de los paquetes (PDF), al utilizar diferentes valores para el tiempo de expiración de ruta. También hay estudios sobre las propiedades de este parámetro fijo en algoritmos de enrutamiento reactivo [8], [9]. Sin embargo, el uso de este parámetro con un valor fijo, para todas las rutas generadas, no es necesariamente eficiente. Después de que el tiempo de expiración ha pasado, la probabilidad de una falla de ruta aumenta con su tamaño, ya que una ruta fallará cuando al menos uno de sus enlaces (o nodos) falle. La contribución de este trabajo es el método VTOA (Tiempo de Espera de Asignación Variable), que asigna el tiempo de caducidad de la ruta de acuerdo con el tamaño de la misma, asegurando una probabilidad de falla que es independiente del número de enlaces en la ruta. Como se demostrará, esta probabilidad se puede elegir de tal manera de optimizar el rendimiento de la red en términos de los parámetros de desempeño deseados, incluyendo el caudal, retardo, overhead, la fracción de entrega de paquetes, etc. Esta metodología, en principio, es aplicable a cualquier algoritmo de enrutamiento en redes con nodos móviles. A modo de ejemplo, se desarrollará una implementación de VTOA como una extensión del algoritmo reactivo AODV (Ad-Hoc Ondemand Distance Vector). A través de simulaciones, en diferentes escenarios de funcionamiento del algoritmo, se mostrará mejoras en el retardo y sobrecarga del orden del 21% y 8,5%, respectivamente, en comparación con el algoritmo AODV original. Al mismo tiempo, otras medidas de desempeño, tales como la fracción de entrega de paquetes se mantienen en valores razonables. El resto del documento está organizado de la siguiente manera: la sección II presenta la metodología VTOA utilizada para la determinación del tiempo de expiración, que depende del tamaño de las rutas, para una probabilidad de falla de ruta IEEE LATIN AMERICA TRANSACTIONS, VOL. 13, NO. 1, JAN. 2015 fija. En la sección III, se busca un valor adecuado de la probabilidad de falla de la ruta Pr . En la sección IV se describe la implementación del método VTOA como una extensión del algoritmo AODV y también detalles de las simulaciones por ordenador realizadas para medir su rendimiento. En la sección V se discuten y analizan los resultados obtenidos en las diferentes simulaciones. Finalmente, en la sección VI se presentan las principales conclusiones del trabajo. II. LA METODOLOGÍA VTOA En los algoritmos de enrutamiento reactivos, se utiliza un valor fijo para el tiempo de expiración de la ruta. Sin embargo, mientras más enlaces hay en una ruta, mayor es la probabilidad de falla, puesto que una ruta fallará cuando al menos uno de sus enlaces falle. Para una ruta dada, un valor de Pr que sea demasiado pequeño dará como resultado tiempos de expiración muy cortos para la ruta, con una pérdida de información útil de enrutamiento (y una gran sobrecarga). Por otro lado, un valor muy alto de Pr también tendrá un efecto negativo en el proceso de comunicación, ya que es muy probable que con frecuencia el sistema intentará utilizar rutas con enlaces rotos, resultando en la pérdida de paquetes. Es razonable pensar que el control de la probabilidad de falla debiera dar lugar a un mejor rendimiento de la red. Puesto que una red Ad-Hoc puede tener rutas activas de longitudes diferentes, ya sea simultáneamente o en momentos diferentes en el tiempo, las probabilidades de falla de estas rutas serán muy diferentes y no será posible controlarlas a voluntad. En la siguiente sección, se propone una metodología que asigna los tiempos de expiración de rutas de acuerdo con el tamaño de la ruta, y garantizando una probabilidad fijo de falla del enlace. 2.1. Determinación de la probabilidad de falla de un enlace En una red móvil, los nodos se mueven en direcciones diferentes a velocidades aleatorias. Cada nodo tiene un radio dado de cobertura R, que representa la máxima distancia de transmisión por radio. Si se supone que los nodos A y B tienen radios de cobertura igual a R, entonces existe un enlace entre A y B, en el instante t, si la distancia entre ellos es a lo sumo R. La Fig. 1 muestra un enlace entre los nodos A y B en el que, en un instante t dado, A y B están a una distancia aleatoria inicial d < R . Dentro del círculo de radio R, alrededor de A, cada ubicación tiene la misma probabilidad de contener el nodo B, por lo que la distancia d entre A y B tiene una distribución uniforme en el interior del círculo. Aunque hay diferentes modelos para el movimiento de los nodos de la red ad-hoc, en este análisis, se usan velocidades VA y VB constantes. Si el nodo A se considera como referencia de posición y de velocidad, la velocidad relativa (VB – VA) es Vm, un parámetro que es específico de la red. La dirección del movimiento está dada por el ángulo θ. Después de un tiempo Δt, los nodos A y B están lejos de sus posiciones iniciales, a una distancia VmΔt. Si se supone que R es igual y fijo para cada nodo en la red, la probabilidad de RIOS : VARIABLE ROUTE EXPIRATION TIME BASED ON 385 falla Pe de un enlace dado después de un tiempo Δt (es decir, la probabilidad de que la distancia d supere el radio R de la cobertura del nodo), depende sólo de Vm y Δt, porque el resto de los parámetros de la red son variables aleatorias uniformes. Como Vm es un parámetro fijo para la red, Pe depende sólo de Δt y no de la topología de la red. La probabilidad de falla de un enlace ha sido discutida por un número de investigadores ([19], [20] y [21]). Se reproduce a continuación los resultados de [19]. Los parámetros d y θ son variables aleatorias con las siguientes funciones de densidad de probabilidad: Figura 1. Escenario con el nodo A fijo y el nodo B móvil. 2d / R 2 , for 0 ≤ d ≤ R f d (d ) = 0, otherwise 1/ 2π , for 0 ≤ θ ≤ 2π fθ (θ ) = 0, otherwise En este escenario Pe es [19]: (1) (2) Pr = 1 − (1 − Pe ) h 2 −1 Vm Δt 4 1 V Δt tan sin −1 m + − sin 2 R 3π 2R 2 π 1 2R V Δt (3) Pe = sin 2sin −1 m , for 0 ≤ Δt ≤ Vm 2R 3π 8R 2R 1− , for Δt ≥ 3π Vm Δt Vm La Fig. 2 muestra Pe versus el tiempo Δt para distintos valores de Vm, calculados con la ecuación (3). 1.0 20 m/s 10 m/s 5 m/s 0.9 0.8 Probability Pe 0.7 0.6 (4) La Fig. 3 muestra la curva de la probabilidad Pr versus la cantidad de saltos h, utilizando la ecuación (4), con los valores de Pe calculados mediante la ecuación (3). Estas curvas muestran el comportamiento de la red con Vm = 10 m/s y con Δt =10 seg, 20 seg y 30 seg. 2.3. Determinación del tiempo de expiración para un Pr dado Usar tiempos fijos de expiración para las rutas conduce a una probabilidad variable de falla Pr , que depende del tamaño de la ruta. A la inversa, se utilizan tiempos variables de expiración para las rutas adquiridas, por lo que Pr permanece dentro de un pequeño rango de un valor objetivo fijo. Para obtener el tiempo de expiración requerido para un valor fijo de la probabilidad Pr , se tiene que encontrar Δt en la ecuación: Pr = 1 − (1 − Pe (Δt ))h (5) en la que Pe Δ t está dada por la ecuación (3). La Fig. 4 muestra las curvas de tiempo de expiración versus el número de saltos, obtenidos con la ecuación (5) para las redes con Vm = 10 m/s , con diferentes probabilidades de falla. 0.5 0.4 0.3 0.2 0.1 0.0 2.2. Determinación de la probabilidad de falla Pr de una ruta dada Una ruta está compuesta por h enlaces, cada uno de ellos entre un par de nodos. Se supondrá que el tiempo t inicial de los diferentes enlaces de la ruta, es el instante en que la ruta está totalmente conformada. Recordar que el algoritmo AODV es un algoritmo de salto a salto, donde cada nodo sólo tiene información sobre el siguiente salto hacia un destino específico. En el proceso de descubrimiento de una ruta, los nodos intermedios adquieren las rutas en orden, comenzando por el nodo más cercano a la fuente y, por esta razón, el tiempo de expiración de las rutas activas recién formadas son diferentes para cada nodo. El tiempo de descubrimiento de ruta es muy corto, comparado con el tiempo de expiración y por esta razón esta pequeña diferencia entre los nodos se considera despreciable con el fin de simplificar el modelo. En consecuencia se pasa por alto el pequeño retardo como consecuencia de los procesos de búsqueda y respuesta. Se define Pr como la probabilidad de falla de una ruta. Una ruta falla si al menos uno de sus h enlaces falla, luego la probabilidad de falla aumenta con el número total de enlaces. Si se supone que la probabilidad de falla de cada enlace es independiente de las probabilidades correspondientes de los enlaces restantes (un supuesto muy común en ausencia de información adicional sobre la naturaleza de la red), la probabilidad de falla Pr de la ruta, después de un tiempo Δt es simplemente 1 menos la probabilidad que todos los enlaces sigan activos, es decir, 0 5 10 15 20 25 Time (sec.) Figura 2. Probabilidad de falla, de la ecuación (3). 30 35 40 III. ESTUDIO DE LA PROBABILIDAD OPTIMA Como el valor del tiempo de expiración de ruta se puede ajustar para obtener una probabilidad Pr fija de falla de una ruta, subsiste la pregunta acerca de qué valor de Pr es el mejor. Para determinar ese valor, se realizaron simulaciones 386 IEEE LATIN AMERICA TRANSACTIONS, VOL. 13, NO. 1, JAN. 2015 utilizando el software ns-2, de una manera similar a [7]. Se utilizó como base el algoritmo de AODV con la aplicación de VTOA como una extensión. El ambiente de simulación se definió de modo de obtener un rendimiento normal del algoritmo AODV. Una definición detallada de los parámetros de la simulación se presenta en la siguiente sección. 1.0 Vmax = 10 m/s 0.9 0.8 Probability Pr 0.7 0.6 0.5 0.4 0.3 30 sec 20 sec 0.2 0.1 0.0 10 sec 0 2 4 6 8 10 12 14 16 18 20 Hops Figura 3. Resultados de Pr , con Vm = 10 m/s. 35 Vmax = 10 m/s Pr = 0.4 Pr = 0.3 Pr = 0.2 Pr = 0.1 Expiration time Δt (sec) 30 25 20 15 10 5 0 0 1 2 3 4 5 6 7 8 9 10 Hops Figura 4. Tiempo de expiración de ruta para Vm = 10 m/sec. 3.1. Simulaciones Las simulaciones se realizaron utilizando un espacio de 1000 x 1000 metros, con una red de 100 nodos móviles y un máximo de 40 conexiones CBR (tasa de bits constante). Se corrieron 10 simulaciones para cada escenario, con los patrones de tráfico y circulación generados al azar. Los parámetros utilizados para evaluar el rendimiento de la red son la sobrecarga (overhead), el retardo promedio y el caudal de la red. La Fig. 5 muestra el rendimiento de la red, en términos de los 3 parámetros utilizados, de acuerdo con una probabilidad de falla Pr dada. Para cada escenario, se realizó simulaciones a velocidades máximas de 5 y 20 m/s. Los resultados de la simulación muestran que el mejor rendimiento se obtiene, para ambas velocidades, cuando Pr =0,1. Por debajo de este valor, el retardo promedio aumenta significativamente, así como hay un aumento menor del retardo promedio para valores de Pr = 0,15 a 0,25, y un aumento más significativo para valores de Pr > 0,25. Se eligió entonces el valor Pr = 0,1 para evaluar el rendimiento de la extensión VTOA. Téngase en cuenta que, en el diseño de una red, simulaciones similares pueden ser utilizadas para determinar el mejor valor o rango de valores de la probabilidad de falla, para las condiciones específicas de la red que está siendo diseñada. IV. IMPLEMENTACIÓN Y SIMULACIÓN DE VTOA La implementación de VTOA consiste básicamente en la asignación de los tiempos de expiración de ruta en función del tamaño de las rutas obtenidas, y usa los valores de tiempo obtenido experimentalmente antes. La simulación para evaluar el rendimiento de VTOA método se llevó a cabo con el software ns-2. El objetivo fue evaluar y comparar los resultados de AODV y de AODV con la extensión VTOA. El tamaño del espacio de simulación se definió de modo de garantizar una densidad media de nodos, adecuado para un buen rendimiento del protocolo. La métrica que se usó para medir la densidad de la red es el número de vecinos por nodo. Los escenarios generados tuvieron un promedio de 16,5 vecinos por nodo. El radio de cobertura de cada nodo fue de 250 metros y la duración de la simulación de 100 segundos. Para cada escenario, se realizaron 10 simulaciones y el rendimiento de los valores mostrados corresponde a la media de los valores resultantes de cada simulación. Se generaron patrones de tráfico CBR, en la que cada fuente transmite paquetes de 512 KB a una tasa de 2 paquetes/seg. Un máximo de 40 sesiones de tráfico se generaron entre orígenes y destinos, seleccionados al azar. Se utilizó el modelo de movimiento Random Waypoint [13]. Cada nodo elige aleatoriamente una coordenada de destino y se mueve a una velocidad aleatoria Vm hasta que se alcanza el destino. Al llegar, el nodo permanece inmóvil durante un tiempo de reposo. Luego, se elige de nuevo una coordenada aleatoria y la secuencia se repite. Para esta simulación, el tiempo de pausa elegido fue de 0 segundos. Las simulaciones se realizaron en escenarios de velocidad entre 0 (m/s) y 20 (m/s). Se elegió los parámetros de algoritmos adecuados a los escenarios. El diámetro de la red seleccionada representa una aproximación del diámetro de la red y se utiliza para asignar el valor del TTL de los paquetes RREQ/ RREP, utilizados en el proceso de búsqueda. Este diámetro se fijó en un valor de 30 saltos. En las simulaciones, el algoritmo utiliza la extensión ERS (Expanding Ring Search) [18]. Con el fin de observar los resultados de ambos algoritmos cerca de su funcionamiento óptimo, los valores utilizados para ERS están cerca de los valores óptimos obtenidos experimentalmente en [15]. Estos valores son: TTL_START = 2, TTL_INCREMENT = 2 y UMBRAL = 4. El criterio de elección para el tiempo de expiración de ambos algoritmos se escogió para lograr su mejor rendimiento. Para AODV, un tiempo de expiración de 5 segundos se seleccionó, de acuerdo con los resultados encontrados en [7]. Para AODV-VTOA, de acuerdo con los resultados mostrados en la sección anterior, se eligió una probabilidad de falla Pr = 0,1. V. ANÁLISIS DE LOS RESULTADOS La Fig. 6 muestra el caudal (throughput) de la red en términos de la velocidad. El caudal se calcula como la proporción de bytes de datos recibidos con respecto al número total de bytes transmitidos. Como se puede esperar, el caudal RIOS : VARIABLE ROUTE EXPIRATION TIME BASED ON disminuye cuando aumenta la velocidad media. Esto es porque a una mayor velocidad, las rutas tienen una duración más corta, lo que aumenta la pérdida de paquetes, debido a fallas de rutas y un aumento en el número de procesos de descubrimiento. Como AODV-VTOA tiene tiempos de expiración variables y óptimos para cada tamaño de ruta, el número de paquetes perdidos debido a fallas de rutas disminuye. La Fig. 6 muestra cómo el rendimiento es en promedio 1,5% mejor en AODV-VTOA con respecto a AODV. La sobrecarga de enrutamiento se calculó como la proporción de mensajes de control transmitidos al total de bytes transmitidos, incluyendo todos los paquetes de control enviados y retransmitidos. En AODV los mensajes de control podían ser RREQ, RREP y RRER. Los mensajes RREQ provienen del proceso de inundación de la red. Los mensajes RREP son las respuestas a los paquetes RREQ y se envían como paquetes unicast. Los paquetes RRER se envían antes de fallas de los enlaces que pertenecen a las rutas activas o antes de la expiración de las rutas activas. Estos últimos tipos de mensajes tienen un tamaño variable que depende del número de destinos inalcanzables, producidos por el enlace roto. Si el tiempo de expiración es demasiado corto, el número de paquetes RRER enviados aumentará. Sin embargo, en ambas simulaciones, se eligieron valores óptimos de los tiempos de expiración. Por esta razón, la mayoría de los mensajes de control proceden de paquetes RREQ. Los estudios muestran, experimentalmente, que los paquetes RREQ representan más del 90% del total de mensajes de control [6]. La extensión VTOA asigna tiempos variables de caducidad, en función de los diferentes tamaños de las rutas, tratando de reducir el número de procesos de búsqueda y, de este modo, disminuye la sobrecarga en los mensajes de control. La Fig. 7 muestra la sobrecarga de enrutamiento en términos de la velocidad. La extensión VTOA presenta una disminución promedio de 8,5% en la sobrecarga, en comparación con el AODV original. El número de procesos de búsqueda también tiene un efecto negativo sobre el retardo promedio. Esto sucede porque, si cualquiera de los enlaces de la ruta tiene una falla, el nodo que la ha detectado envía un mensaje de RRER a la fuente. Una vez que la fuente recibe este mensaje, que guarda los paquetes generados en un buffer y se inicia un proceso de búsqueda. En la extensión LR (reparación local), la búsqueda se inicia por el nodo que detecta el enlace fallado, si está más cerca del destino que a la fuente. En ambos casos, estos procesos de búsqueda adicionales interrumpen la comunicación y aumentan el retardo promedio de la red. Además, un aumento de la velocidad del nodo produce una mayor tasa de falla en los enlaces, que causa un aumento en el número de procesos de inundación. La Fig. 8 muestra el retardo como una función de la velocidad para ambos algoritmos. En promedio, en AODV-VTOA el retardo se reduce un 21,3%, en comparación con AODV. Esto es porque el número de procesos de búsqueda, tanto debido a la expiración de ruta y la falla de ruta, disminuye. Nótese que esta mejora se consigue sin aumentar la sobrecarga la cual, por lo demás, disminuye. Otro indicador, frecuentemente utilizado para medir el rendimiento de los algoritmos de enrutamiento Ad-Hoc, es la 387 fracción de paquetes entregados (PDF). La PDF se calculó como la razón de los paquetes de control y datos recibidos, y el número total de paquetes transmitidos. Figura 5. Retardo promedio versus Pr . Figura 6. Throughput versus Vm . Figura 7. Sobrecarga versus Vm . Los paquetes perdidos tienen una influencia negativa en este indicador. Los paquetes perdidos de control generalmente son paquetes RREP, porque sólo estos paquetes se envían a direcciones específicas (los paquetes RREQ se envían por inundación a toda la red y los paquetes RRER se envían por inundación con TTL = 1). El número de paquetes perdidos de control depende de la movilidad y es el mismo en ambos algoritmos. El número de paquetes de datos perdidos puede variar en ambos algoritmos, dependiendo de la falla de enlaces 388 IEEE LATIN AMERICA TRANSACTIONS, VOL. 13, NO. 1, JAN. 2015 en las rutas activas. La Fig. 15 muestra el valor de PDF en términos de la velocidad. Los resultados indican un pequeño incremento promedio de 0,7% en el PDF al usar AODVVTOA. Este aumento no es significativo, mientras que los restantes indicadores mejoran. Pr puede producir que la extensión VTOA tenga una influencia negativa en el rendimiento de la red. AGRADECIMIENTOS Este trabajo fue financiado, en parte, por los proyectos CEDEUS Conicyt/Fondap/15110020 y CIGIDEN Conicyt/Fondap/15110017. REFERENCIAS [1] [2] [3] [4] [5] [6] Figura 8. Retardo versus Vm . [7] [8] [9] [10] [11] [12] Figura 9. PDF versus Vm . VI. CONCLUSIONES En este trabajo, se analizó el uso de los tiempos variables de expiración de las rutas activas en los algoritmos de enrutamiento Ad-Hoc, con el fin de disminuir el número de procesos de descubrimiento, porque ellos reducen considerablemente la eficiencia en el uso del ancho de banda. Se propone el método de extensión VTOA para la determinación variable de los tiempos de expiración de las rutas, lo que permite garantizar una determinada probabilidad de error Pr . Se estudió el cálculo y asignación de este tiempo de expiración a las rutas en función de su tamaño. Para evaluar el desempeño del método, se realizó un gran número de simulaciones en entornos de nodos móvil a diferentes velocidades. El rendimiento del algoritmo AODV con la extensión VTOA muestra mejoras sobre el método AODV original, incluyendo una disminución de 8,5% en la sobrecarga y una caída de 21,3% en el retardo promedio. También se concluye que una selección incorrecta del valor de [13] [14] [15] [16] [17] [18] [19] [20] [21] Mohapatra, P. & Krishnamurthy, S. (2005). Ad Hoc Networks Technologies and Protocols. Berlin: Springer. Basagni, S.; Conti, M.; Giordano, S. & Stojmenovic, I. (2013). Mobile Ad Hoc Networking: The Cuttinh Edge Directions. Vol.35. John Wiley & Sons. Ilyas, M. (2010). The Handbook of Ad hoc Wireless Networks. CRC Press. Alotaibi, E., Mukherjee, B. (2012). A survey on routing algorithms for wireless Ad-Hoc and mesh networks. Computer Networks, 56, 940-965. Mohseni, S.; Hassan, R.; Patel, A.; Razali, R. (2010). Comparative review study of reactive and proactive routing protocols in MANETs. 4th IEEE International Conference on Digital Ecosystems and Technologies (DEST), pp.304,309. S.-J. Lee, E. M. Belding-Royer, and C. E. Perkins (2003). Scalability Study of the Ad Hoc On-Demand Distance-Vector Routing Protocol, International Journal of Network Management, 13 (2), 97-114. Richard, C., Perkins, C.E. & Westphal, C. (2005). Defining an Optimal Active Route Timeout for the AODV Routing Protocol. Second Annual IEEE Communications Society Conference on Sensor and Ad-Hoc Communications and Networks, IEEE SECON. Tseng, Y.C., Li, Y.F. & Chang, Y.C. (2003). On Route Lifetime in Multihop Mobile Ad Hoc Networks, IEEE Transactions on Mobile computing, 2 (4), 366-376. Turgut, D., Das, S. & Chatterjee, M. (2001). Longevity of Routes in Mobile Ad Hoc Networks. Vehicular Technology Conference, IEEE VTS 53rd. Vol. 4, 2833-2837. Zhou, B., Marshall, A., Wu, J., Lee, T-H. & Liu, J. (2005). A CrossLayer Route Discovery Framework for Mobile Ad Hoc Networks, EURASIP Journal on Wireless Communications and Networking, (5), 645-660. Clausen, T.H., Jacquet, P., Viennot, L. & Hansen, G. (2002), Optimizing Route Discovery in Reactive Protocols for Ad Hoc Networks. Rapport de recherché, 4509, 3-14. Yoon, J., Liu, M. & Noble, B. (2003). Random waypoint considered harmful. INFOCOM 2003, Vol. 2. Royer, E.M., Melliar-Smith, P.M., & Moser, L.E. (2001). An Analysis of the Optimum Node Density for Ad hoc Mobile Networks, IEEE International Conference on Communications, ICC 2001, 857-861. Tseng, Y. C., Ni, S. Y., Chen, Y. S., & Sheu, J. P. (2002). The broadcast storm problem in a mobile ad hoc network. Wireless networks, 8(2-3), 153-167. Hassan, J. & Jha, S. (2005), On the Optimization Trade-offs of Expanding Ring Search. Distributed Computing-IWDC 2004, 489-494. Fronczak, A., Fronczak, P. & Holyst, J.H. (2004). Average path length in random networks. Physical Review E 70 (5). Kouvatsos, D., & Mkwawa, I. (2005). Broadcasting methods in mobile ad hoc networks: an overview. Proceedings of the HetNet, UK, 64-71. Perkins, C., Belding-Royer, E., & Das, S. (2003). RFC 3561-ad hoc ondemand distance vector (AODV) routing. Internet RFCs, 1-38. D. Hong and S. Rappaport (1986). Traffic models and performance analysis for cellular mobile radio telephone systems with prioritized and nonprioritized handoff procedures. IEEE Transactions on Vehicular Technology, 35. 3, 77-92. Gruber, I., Li, H. (2002). Link Expiration Times in mobile Ad Hoc Networks. 27th Annual IEEE Conference on Local Computer Networks LCN 2002. Shu, X., & Li, X. (2007). Link failure rate and speed of nodes in wireless network. In Wireless Communications, Networking and Mobile Computing, WiCom 2007, 1441-1444. RIOS : VARIABLE ROUTE EXPIRATION TIME BASED ON Miguel Ríos was born in Santiago, Chile. He is Electrical Engineer from the Universidad de Chile, Master of Applied Science in Electrical Engineering and Doctor of Philosophy in Electrical Engineering from the University of Ottawa, Canada. Professor Ríos has been with the Department of Electrical Engineering of the Pontificia Universidad Católica de Chile since 1977. During this period of time he has lectured, performed research and consulting in Telecommunications. He has been Chairman of the Department in five periods (1988-1990, 1990-1992, 2000-2002, 2002-2003 and 20122014). In 2003, he was Senior Visiting Research Scientist at the School of Information Technology and Engineering (SITE) from the University of Ottawa, Canada. 389