Teoría del Complejo Activado y Teoría de Colisiones
Anuncio

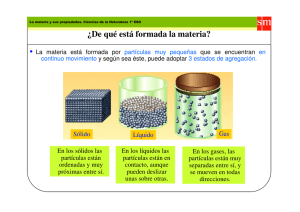
Energía Libre de Gibbs 1/30/2014 Estado de transición G≠ reactivos Productos Coordenada de reacción Reacción: HO− + CH3Br → [HO --- CH3 --- Br]+ → CH3OH + Br− http://upload.wikimedia.org/wikipedia/commons/thumb/9/99/Rxn_coordinate_diagram_5.PNG/400px-Rxn_coordinate_diagram_5.PNG Derivación por Equilibrio de Complejo Activado I . Equilibrio : A B X P (1) A. Energía de vibración clásica energía de vibración cuántica Eclásica kBT h Ecuántica k BT h (2) kB es la constante de Boltzman B. Rapidez del complejo activado a moverse a través de la barrera de energía potencial. d A dt d A X x frecuencia de descompoción de X k T x X B dt h X (3) (4) 1 1/30/2014 Continuación derivación C . Del equilibrio del complejo activado A B X P : X K A B X K A B (5) D. Sustituyendo (5) en (4) : d A k BT k T B X dt dt h h E . S i d efin im o s : d A k T k B K h K A B (6) (7 ) F . S u stitu yen d o (7 ) en (6 ) : d A k A B (8) dt K≠ se calcula por termodinámica estadística, usando propiedades físicas fundamentales para los reactivos y el complejo activado (largo de enlace, frecuencia de vibración, masa y momento de inercia). Relación de K≠ con termodinámica II . Ecuaciones termodinámicas: 0 K G G0 RT ln Q G0 RT ln K G 0 A. K exp y RT S 0 H 0 B . K exp R RT C. Sustituyendo (10) en (7): k T k T G0 k B K B exp h h RT G 0 H 0 T S 0 (9) (10) k T S 0 H 0 B exp exp h R RT Ecuación de Eyring de Teoría de Complejo Activado (11) 2 1/30/2014 Asociación de Eyring con Arrehnius k BT K h B. logaritmo natural a ambos lados : A. Eyring en la ecuación (7): k= k T ln k= ln B ln K h C. derivada con respecto a T : (12) d ln k 1 d ln K dT T dT (13) Asociación de Eyring con Arrehnius k f d ln kr U 0 d ln K 2 D. pero : dT dT RT d ln k 1 d ln K E. Sustituyendo (14) en (13): dT T dT (14) d ln k 1 U 0 RT U 0 dT T RT 2 RT 2 (15) pero H 0 U 0 n 0 RT 0 0 (16) 0 0 d ln k RT H n RT H RT (1 n ) 2 dT RT RT 2 (17) 3 1/30/2014 Equivalencia con Arrhenius E d ln kArr H 0 RT (1 n 0 ) d ln kEy A. a2 dT RT RT 2 dT B. Energía activación: Ea=H 0 RT (1 n 0 ) (18) (19) C. Por lo tanto : k=Ae E - a RT Ae H 0 RT ((1n 0 ) RT Ae H 0 RT 1 e e n 0 (20) Equivalencia con Arrhenius D . de la ecuación (11) : H 0 RT S 0 R k BT e e h E . igualando (20) y (11) : k Ae H 0 RT A e e e 1 e n 0 n 0 k BT e h k BT e h 0 S R H 0 RT e S 0 R (21) (22) exp(S/R)-Orientación; cambios en configuración; orden y desorden del complejo activado 4 1/30/2014 Dinámica de choques Ileana Nieves Martínez Colisiones probables 5 1/30/2014 Colisiones probables Factores que afectan la probabilidad de reacción • Violencia del choque • Proximidad: – diferencia entre colisión frontal vs roce. • Orientación relativa • Rotación y vibración • Propiedades p físicas: – conductividad termal, – viscosidad, – difusión, etc. 6 1/30/2014 Modelo de esferas rígidas d B A dA dB • La velocidad con que se mueven las partículas es inversamente proporcional a la masa de la partícula. • Se define (sigma) (sigma) como la distancia entre los centros d las de l eferas f para un sistema i t d d de dos esferas f rígidas í id A y B de acuerdo a la ecuación: 1 2 d A d B rA rB Modelo de esferas rígidas (continuación) • Sección tranversal de colisión: es el área que incluye los centros de las partículas y se define por la expresión: A = πσ2 = π(rA +rB)2 (área de un círculo) • El desplazamiento de estas partículas en un tiempo dado se puede definir por la ecuación de velocidad: v desplazamiento d d v dt unidad de tiempo dt 7 1/30/2014 Choques parícula liviana contra pesada • Asumiendo que las partículas livianas (A A) se mueven con una velocidad promedio <v> y que las más pesadas (B B) se mantienen estáticas en un área equivalente a la sección transversal A, podemos representar esta situación con el diagrama a continuación: • Las partículas sombreadas tienen la capacidad de chocar efectivamente ya que su centro está dentro del cilindro que se forma a consecuencia del movimiento. Choques (continuación) • El desplazamiento de las partículas dentro del cilindro con la velocidad promedio <v> se representa por la expresión: Volumen l d l cilindro del l d A x d 2 x v dt d rA rB v dt d 2 • El # de choques de las partículas livianas, A, con las partículas pesadas, B, dependerá de la cantidad de partículas pesadas que haya dentro del cilindro o de su densidad (número de partículas pesadas NB por unidad de volumen, V). – Si definimos el # de choques de partícula liviana por unidad de tiempo (dt = 1) como zAB entonces, Volumen rA rB 2 v dt z AB NB 2 rA rB v V 8 1/30/2014 Número de choques y velocidad relativa • Cuando ambas partículas se mueven se considera el movimiento relativo y la velocidad relativa se representa: Velocidad 1 v AB v 2A v B2 2v A v B cos 2 vA Velocidad vB a) Acercamiento con Energía Cinética baja Velocidad Velocidad b) Acercamiento con Energía Cinética alta Choque efectivo vs no efectivo Colisión efectiva Colisión inefectiva Complejo Activado inestable 9 1/30/2014 Velocidad relativa • Si se asumen los siguientes ángulos entre los vectores de velocidad tenemos las situaciones a continuación: = = 0 0° ° = 180 180° ° = 90° 90° • Se asume que el ángulo más probable es 90 90° °, entonces el cos 90° 90° = 0 0. Velocidad relativa (continuación) • Cuando A = B la expresión para la velocidad relativa es: 1 1 1 v AA 2v 2A 2v 2A cos 2 v 2A 21 cos 2 v 21 cos 2 v AA v AA – Para θ = 90°: 2 • Cuando A ≠ B y θ = 90° la velocidad relativa es: v AB vA 2 vB 2 1 2 8 RT 8 RT M A MB 1 2 10 1/30/2014 Resultado de colisiones • Se sustituyó la definición de velocidad promedio que predice la Teoría Cinético Molecular de los gases ideales: 8 RT vA M A • El número de colisiones cuando ambas partículas se mueven entonces es: – para A = B 2 vA d 2 z AA – para A ≠ B z AB rA rB 2 NA V 8 RT 1 1 M A MB 1 2 NB V Colisiones totales • La rapidez de colisión total por unidad de volumen se representa por ZAB o ZAA y se expresa: 1 2 Z AB Z AA NA 1 2 8 RT 1 z AB rA rB V M A MB N 1 1 N z AA A 2 v A d A2 A 2 2 V V 1 2 1 PA N 0 2 8 RT Z AA dA 2 M A RT nN Av PN Av N donde : A V V RT N A NB V V 2 2 11 1/30/2014 Trayectoria libre media, • Definición: distancia total recorrida en un segundo entre el número total de choques de una partícula. v dt d dist. total recorrida en un seg # total de choques de una part. z AA v 2 d A2 v ya que : NA V RT 2 d A2 PN Av N A nN Av PN Av V V RT Trayectoria libre media, • A presiones altas habrá choques entre partículas y la trayectoria p y libre media será más pequeña. Al vacío la trayectoria libre media puede ser bien grande (160 metros). • M Medidas did d de ttrayectoria t i lib libre media di son útiles para describir las propiedades de transporte de gases. 12 1/30/2014 Teoría de Colisiones por Ileana Nieves Martínez Reacción Bimolecular en estado gaseoso I . Redistribución energía para choques intermoleculares (movimiento relativo) : A. Esferas rígidas : 1 N N N A NB 2 2 8 RT A B rA rB v AB rA rB (1) V V V V Z AB 2 B. Distribución de velocidad : 2 v2 N N AB 2 kT 3 A B 4 dv AB v e AB AB V V 2 kT 3 Z AB (2) C. Distribución de Energía 1 Z AB N N 1 2 A B V V kT 2 N 1 2 A V kT 2 Z AA 1 2 3 3 2 AB e d kT (3) 0 2 e d AA kT (4) 0 13 1/30/2014 Continuación derivación D . Rapidez : R d d NA V dt n A N Av V dt N 1 Av d dt N E0 2 8 RT N Z AB rA rB e RT A V 1 2 E0 2 8 RT R Z AB rA rB e RT 1 2 nA V Av d A dt NB V 2 n A nB N Av V V E0 8 RT 2 R rA rB e R T N Av A B 1 2 E0 d A 2 8 RT R N Av r r e RT N Av2 A B A B dt 2 2 1 R rA rB N Av 2 8 RT 2 E 0 RT A B e Continuación derivación E. Constante específica de rapidez de acuerdo a TC : 1 E0 8 RT E0 RT 1 BT 2 e RT k rA rB N Av e E 1 ln k ln B ln T 0 RT 2 2 2 d ln k 1 dT 2T 12 RT E0 Ea E0 RT 2 RT 2 RT 2 (6) (7) (8) Ea 1 2 RT E0 14 1/30/2014 Continuación derivación Para determinar ATC : k Ae A e Ae 1 2 E0 RT Ea RT e Ae BT 1 1 2 2 E0 RT BT e 1 2 1 2 BT e 1 2 e E0 RT E0 RT 8RT 2 e rA rB N Av 1 2 1 2 pA ' 15