CONTROL Y GUIADO DE UN CUADRICÓPTERO BASADO EN
Anuncio

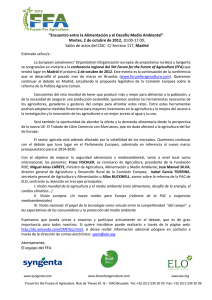
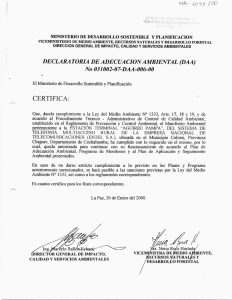
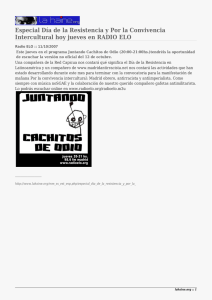
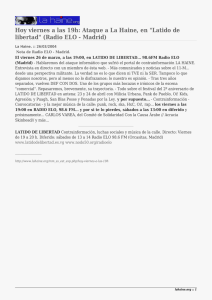
3ras Jornadas ITE - 2015 -Facultad de Ingeniería - UNLP CONTROL Y GUIADO DE UN CUADRICÓPTERO BASADO EN MODELOS LINEALES L. Gómez, S. Hernández y A. Zumarraga c c Departamento de Aeronáutica – Facultad de Ingeniería - Universidad Nacional de La Plata Calle 116 e/ 47 y 48 - La Plata (1900) - Buenos Aires - Argentina e-mail: [email protected] RESUMEN En este trabajo se presenta el desarrollo de un sistema de control de trayectoria para un cuadricóptero usando metodologías de diseño basadas en modelos lineales. Nuestro objetivo es contar con los subsistemas básicos para la puesta en marcha de un prototipo de la aeronave, disponer luego de un diseño de referencia a la hora de evaluar aproximaciones más sofisticadas y servir como estrategia de contingencia para la implementación de un esquema de detección, identificación y recuperación ante fallas (FDIR). Se plantea una arquitectura en cascada entre un bloque de control de posición y otro de actitud con separación en frecuencia, junto con los bloques de transformación correspondiente para la definición de referencias de actitud y comando de los actuadores. Se realiza un análisis de la respuesta aerodinámica de los rotores en un rango amplio de condiciones de operación. Existiendo términos evidentemente no-lineales en cualquier formulación matemática para este problema, se postulan diversas hipótesis simplificativas para obtener una aproximación lineal y así poder utilizar técnicas de síntesis para sistemas LTI. Finalmente la pertinencia de estas hipótesis es validada mediante simulación numérica con modelos independientes no lineales, y se consideran algunos puntos débiles del modelado adoptado. Palabras clave: Control Lineal, Requerimientos, Linealización, Limitaciones, Control en Cascada, Control de Actitud INTRODUCCIÓN Un cuadricóptero es un vehículo sub-actuado; posee seis grados de libertad y solo cuatro acciones de control independientes. El modelo matemático más simple para representar su dinámica surge de aplicar las ecuaciones de conservación de cantidad de movimiento a un cuerpo rígido tomando una terna de referencia solidaria al mismo. El modelo resultante es no lineal ya solo por la presencia de términos de acoplamiento de inercia. Sin embargo veremos que una linealización en torno de su condición de equilibrio permite usar un modelo dinámico lineal para la síntesis de los compensadores con resultados satisfactorios; y así definir una arquitectura de base contra la cual contrastar diseños más sofisticados. Por otra parte, desde el análisis lineal es posible definir de una forma clara y comprensible los requerimientos y compromisos en el diseño cuando se trata de llevar la propuesta a una realización práctica. En este trabajo presentamos una síntesis de la definición de requerimientos, planteo del diseño y su validación en simulación. En función de acotar el alcance no se abunda en desarrollos matemáticos relativamente obvios, ni se analizan los aspectos específicos del hardware o de la instrumentación. METODOLOGÍA El cuadricóptero aquí considerado es un vehículo de pequeñas dimensiones (menor a un metro) actuado mediante cuatro motores eléctricos de tipo brushless contra-rotantes en pares. Podemos considerarlo como un cuerpo rígido con confianza, dado que la frecuencia del primer modo elástico está muy por encima del mayor ancho de banda que pretendemos alcanzar. 72 Departamento de Aeronáutica 2015 - Año Internacional de la Luz 1 3 ra sJo rnada sITE- 20 15-Fa cu l tadd eIng en i e r ía-UNLP C om oe sh a b i tu a la lan a l i z a rl am e c án i c ad eu nr íg id o , a d o p t a n d ou n at e rn ad er e f e r en c i aso l id a r i aa lv e h í c u l o c en t r a d ae ns uc en t r od eg r av ed adya p l i c a n d ol a s e cu a c io n e s d e con s e rv a c ión d e c a n t id a d d e m ov im i e n tol in e a lyang u l a r ob t e n em o sl a se c u a c io n e s c a rd in a l e sd el am e c án i c a : ⃗ ⃗ ⃗ ⃗ ⃗ ⃗ ⃗ ⃗ ⃗ ⃗ ⃗ ⃗ ⃗ (1 ) (2 ) sl ac a n t id add em ov im i en toa n g u l a r( om om e n toc in é t i c o )to t a l ,⃗e sl ac a n t id a dd e ,e nd o n d e⃗e ⃗y s a sv e lo c id a d e sl in e a lya n g u l a r ,⃗ o nlo sm om e n to syfu e r z a s m ov im i e n tol in e a l , ⃗y⃗sonl se lm om e n toc in é t i c or e su l t a n t ed eto d a sl a s r e su l t a n t e s , e sl am a s a , e se lt e n so rd ei n e r c i ay⃗e m a s a sro t a n t e s.E ls eg undot é rm inod e ll a z oi z q u i e rd oe n(1 )e se lt é rm in od ea co p l am i e n tod ein e r c i a q u es u rg ep o rcon s id e r a run at e rn ad er e f e r e n c ian oin e r c i a l .E s toú l t im oe sn e c e s a r iop a r ap o d e r u t i l i z a ru nt e n so rd ein e r c i acon s t an t e . A d em á sd el aa t r a c c i ón g r av i t a to r i a ,enl as um ad efu e r z a sy m om e n to si n c lu im o slo se f e c to s a e ro d in ám i c o sg en e r ado sp o rlo sro to r e s ;s o b r elo sc u a l e st e n em o sc o n t ro ld ev e lo c id a dd ero t a c ió n in d e p e n d i e n t e , ycon s id e r am o st am b i énl ar e s i s t e n c i ap a r á s i t ad e lfu s e l a j e . I n d e p en d i e n t em en t ed e lm od e loa dop t ado ,c o nc u a lq u i e rp l a n t e om a t em á t i c op a r al aa e ro n a v eb a s a d o e np a r ám e t ro scon c en t r ad o s ,lo se f e c to sa e r o d i n ám i c o sd e b e ns e rr e em p l a z a d o sp o ru nd e s a r ro l loe n s e r i ed eT a y lo r ,ye s t ed eb es e rr e s t r ing id oa lt é rm in od ep r im e ro rd e ns ip r e t e n d em o sq u ee lm o d e lo s e al in e a l . D e sp r e c i a n d oe lm om en toang u l a rn e t o ⃗d elo sm o to r e s,q u ep o rs im e t r í ae nc o n d i c io n e sn om in a l e s e sn u lo ;t e n em o slos ig u i en t e : ⃗ ⃗ ⃗ ⃗ ⃗(⃗ ⃗ ⃗ ⃗ ⃗ ) ⃗ ⃗ ⃗ ⃗ ⃗ ⃗ ⃗(⃗ ⃗ ⃗ ⃗ ⃗ ) ⃗ ⃗y⃗ ⃗ ⃗ ⃗ ⃗sonl ⃗ ⃗e a sfu e r z a sym om e n to sa e r o d in ám i c o s ,⃗ sl av e lo c id a dd e lv i e n to , e se l ,e nd o n d e⃗ sl am a t r i zd ero t a c ió nq u ep e rm i t ep ro y e c t a re lv e c to rg r a v e d ad⃗e nl at e r n a v e c to rd ec o n t ro ly e m óv i l .T o d o slo sv e c to r e sene s t a se cu a c io n e se s t á nr e f e r id o sal at e rn am ó v i l ,e x c ep t op o re lv e c to r g r a v e d adq u ee s t áaqu ír e f e r idoaun at e rn ain e r c i a l . D e b em o sa c l a r a rq u eu nr o to r em b e s t idop o ru nf lu j or e l a t iv on oa x i a lg e n e r au n ac om p o n e n t ed e fu e r z ayu nm om en toene j e sp e rp e nd i c u l a re sa le j ed ero t a c ió n .P o rlot a n toe lm o d e lop a r alo s m om e n to sa e ro d in ám i co sd eb e r í ad ep e nd erd el av e lo c id a dd et r a s l a c ió nyd e lv i e n t ol a t e r a l. L a d i r e c c ió nd ee s to se f e c to ss einv i e r t es ie ls en t id od eg i rod e lro t o rc am b i a ;yd a d oq u elo sro t o r e sg i ra n e ns en t id o sopu e s to senp a r e s ,e le f e c t on e tod eu nf l u jod ea i r en oa l i n e ad oa le j eze nl ac o n d i c ió n n om in a le snu lo.A sum i en do com od e sp r e c i a b l e se s t o se f e c to sp a r ap e q u e ñ o sa p a r t am i e n to sd ed i c h a c o n d i c ió np od em o sind ep e nd i z a rlo sm om e n to sa e r o d i n ám i c o sd e ld e s p l a z am i e n t ol in e a l. C o ne s to,nu e s t r aap r ox im a c iónp a r alo se f e c to sa e ro d in ám i c o squ e d ar e d u c id ap a r ac ad aro to rau n a v a r i a c ió nd eem pu j ed ep e nd i en t ed esuv e l o c i d a dd eg i royd el ac om p o n e n t ed ev e lo c id a dd el a c o r r i e n t er e l a t iv ano rm a la lp l anod eg i ro L ad e d u c c ió nan a l í t i c ad eun m od e lo m a t em á t i c op a r al aa e ro d in ám i c ad elo sr o to r e sn oe sv i a b l e , s a lv ob a jofu e r t e sr e s t r i c c io n e senl a sco nd i c io n e sd ec o n to r n oye nl ae s t ru c tu r ad el ae s t e l av o r t i c o s a . E s p e r am o sc on t a re nunfu tu roc e r c an oc o nd a to se x p e r im e n t a l e sd etú n e ld ev i e n to;p e r op a r ae s t e 7 3 D epa r tam en t od eA e r onáu t i ca 20 15-AñoIn t e rna c iona ld elaLu z 2 3 ra sJo rnada sITE- 20 15-Fa cu l tadd eIng en i e r ía-UNLP t r a b a jo d e s a r ro l l am o s un a ap r ox im a c ió nn um é r i c ac u a s ie s t a c i o n a r i ac om b in a n d ol aT e o r ía d e E l em e n tod ePa layl ad e lT eo r íad e lD i s coA c tu a d o rb a jou ne sq u em ai t e r a t iv o,d a d oq u en u e s t r a s v a r i a b l e sd ee n t r ad asonv e lo c id a dd eg i royc om p o n e n t ed ef lu jon o rm a l.S ía d o p t am o sc u rv a s e x p e r im e n t a l e sd esu s t en t a c iónyr e s i s t en c i ae nfu n c ió nd e lá n g u lod ea t a q u ep a r as e c c i o ne sd el ap a l a , e x t r a p o l a n d oaun m od e lod ep l a c aconf lu jod e s p r e n d id op a r aá n g u lo sm a y o r e sa ld ep é rd id a .E nc ad a i t e r a c ió np a r t im o sd eun ae s t im a c iónd ev e lo c id a di n d u c id ayc a l c u l am o sl at r a c c ió nto t a l .C o ne s to r e a l i z am o s un a nu ev ae s t im a c ión d ev e lo c id a din d u c id aei t e r am o sh a s t aq u ed i c h ae s t im a c ió n c o n v e r j a . L o sr e s u l t a d o sob t en i do sp a r at r a c c ión ( i z q u i e rd a )yto rq u er e a c t iv o (d e r e ch a )e nf u n c ió nd e v e lo c id a dd eg i ro ( ind i c ad acom oqene lg r á f i c o )yv e lo c id a dd ef lu joa x i a l ( in d i c ad ac om owe n e lg r á f i c o )s o nlo ss ig u i en t e s . 60 1 .4 50 1 .2 1 M[N .m ] T[N ] 40 30 20 0 .6 0 .4 10 0 -25 0 .8 1 .5 -20 -15 1 -10 -5 0 5 2 0 .2 2 1 .5 0 -25 4 x10 -20 -15 1 -10 0 .5 10 15 20 0 -5 0 5 q[ rpm ] 4 x10 0 .5 10 15 20 0 q[ rpm ] w[m /s ] w[m /s ] P o d em o sm a n e j a rl anol in e a l id add el ar e s p u e s t aa e r o d in ám i c ad e lro to rd e f in i e n d oal at r a c c ió n c om oa c c ió nd e con t r o lv i r tu a l ,yu t i l i z a rs u p e r f i c i e sd ea ju s t eo u nm a p eo b a s a d oe nd a to s e x p e r im e n t a l e sonum é r i co sp a r aconv e r t i re s t aa c c ió nd ec o n t ro le nl aa c c i ó nr e a l e nt i em p od e e j e c u c i ó n .A una s íl aob t e n c iónd eun m o d e lol in e a lr e q u i e r eex t r a e re lv a lo rd el ad e r iv a d ae n t r e t r a c c i ó nyv e lo c id adax i a lp a r al ac ond i c ió nn om in a l . U n od elo sa sp e c to squ ed e b ent en e r s eenc u en t aso b r ee lr a n g od ev a l id e zd el aa p ro x im a c ió nl i n e a le s q u eco nv e l o c i d ad e sax i a l e sim po r t an t e se lro t o re n t r a r áe np é rd id a . 80 60 40 ángu lodea taque[ ° ] P o d em o sa sum i rqu el as e c c iónd el a p a l ad e lro to re n t r a r áen p é rd id aa á n g u lo sd ea t a qu ed e lo r d end elo s 2 0 ° .E ne ls ig u i en t ed i ag r am av em o s l av a r i a c i ó nd eáng u lod ea t aqu ee n fu n c ió nd e lr ad i op a r ad i f e r en t e s v e lo c id a d e sd ef lu joax i a l ,endond e s eh a nr e s a l t ad ol a sv a r i a c ion e sp a r a ±1 5m / s. 20 0 -20 -40 0 .01 0 .02 0 .03 0 .04 0 .05 0 .06 rad io[m ] 0 .07 0 .08 0 .09 0 .1 0 .11 E s t r a t e g iad eC on t ro l P o rs e ru ns i s t em asuba c tu ado ,e lco n t ro ld ep o s i c ió ns elo g r am e d i a n t ee la ju s t ed el ai n t e n s i d a dy d i r e c c ió nd e lv e c to rem pu j er e su l t an t ed elo sc u a t ror o to r e s .P a r ae s toú l t im os er e q u i e r ec o n t a rc o nl a c ap a c id a dd econ t r o l a rl aa c t i tud ,locu a ls er e a l i z ad e s b a l a n c e a n d oe lem p u j ee n t r ero to r e so p u e s to s. P l an t e am o sen to n c e su nco n t ro lenc a s c ad a ,e nd o n d ee lc o n t ro ld ea c t i tu dc o n s t i tu y eu nl a z oin t e rn o d e lc o n t ro ld epo s i c ión,yl a sr e l a c ion e se n t r ee s to sye lv e h í c u los er e a l i z am e d i a n t eb lo q u e sd e t r a n s fo rm a c iónA1 yA2: 7 4 D epa r tam en t od eA e r onáu t i ca 20 15-AñoIn t e rna c iona ld elaLu z 3 3 ra sJo rnada sITE- 20 15-Fa cu l tadd eIng en i e r ía-UNLP TRAY POS A1 A2 CUAD ACT INS L a sfu n c io n e sd es en s a dol a sp rov e ee ss i s t em ad er e f e r e n c i ain e r c i a l ,m i e n t r a sq u el ad e f in i c ió nd e t r a y e c to r i apod r í ar e su l t a rd ecom ando sd eu no p e r a d o re j e c u t a d o se nt i em p or e a l ,u np l a nd ev u e lo p ro g r am a d o ,d elo sre s u l t a do sd eune squ em ad ein t e l ig e n c i aa r t i f i c i a lod eu ne s q u em ain t e g r a d oc o n to d o se s to se l em en to s . C om oe sh a b i tu a lene s to sc a so ss er equ i e r eu n as ep a r a c ió ne nf r e c u en c i ae n t r elo sl a z o sd ep o s i c i ó ny a c t i tu dp a r ap e rm i t i r l e so p e r a rd efo rm ad e s a cop l a d a .D e sd ee lp u n t od ev i s t ad e lg u i a d o ,l ap l a n t ae s u np u n to m a t e r i a lcon du c i d apo runv e c t o rf u e r z aq u ee np r in c ip iop u e d ea ju s t a r s ed efo rm al ib r e ; m i e n t r a sq u ed e s d ee lp un t od ev i s t ad e lc o n t ro ld ea c t i tu de lv e h í c u loe su nc u e rp or íg id oc o nt r e s g r a d o sd el ib e r t adp a r asum ov im i en toang u l a r . L o ss i s t em a sd esu p e rv i s ió nycon t ro ls eim p l em e n t a r á ne nu nm i c ro c o n t ro l a d o rATMELAT3 2UC 3C , m i e n t r a sq u ep a r as en s ad os ecu en t aconu nk i td es en s o r e sin e r c i a l e s ATAVRSB INd e lm i sm o f a b r i c a n t e ,ys ee sp e r aco n t a rconun m ó d u lo GNSSSE 8 6 8d el af i rm aT e l i tp a r ae ls en s ad od e p o s i c ió na b so lu t a.P a r alog r a rl ap r e c i s ió nn e c e s a r i ae ne ls en s a d od ep o s i c ió ns ed e b e r áin t e g r a ru n s i s t em aa d i c io n a ld eco r toa l c a n c ep a r al a sp a s ad a sd ep r e c i s ió n .C o n s id e r am o sr e a l i z a re s to m e d i a n t e u ns i s t em ad ev id eoy /ou ne squ em ad e GNSS d i f e r e n c i a lu t i l i z a n d ou ns eg u n d om ó d u lo;a sp e c to s e s to sq u ea ú nnoh em o sd e s a r ro l l ado . R equ e r im i en to s H em o sp l a n t e adocom oe s c en a r ioun aap l i c a c ió nac i e l oa b i e r to ,c om op o re j em p l oe lr e l e v am i e n tod e l ín e a sd ea l t at en s ió nuo t r a sap l i c a c i on e sd ein s p e c c ió ne na l tu r a .E s toim p l i c ae np r in c ip i oc i e r t a p r e c i s ió ne ne ls eg u im i en t od el a sr e f e r en c i a sd ep o s i c i ó nyc ap a c id a dd er e c h a z od ep e r tu r b a c io n e s a tm o s f é r i c a s .Am bo sa sp e c to sr e c a e ne nl a sfu n c i o n e sd eco n t ro ld ep o s i c ió n . E s t a b l e c em o scom or equ e r im i en toun ato l e r a n c i ad e0 .2 5me ne ls eg u im i e n t od er e f e r e n c i a sd e p o s i c ió n ,p e n s and oe nm an t en e renfo cou ns i s t em ad ev id e oc o n v e n c io n a ls o b r eu no b j e t iv oau n o s 2md ed i s t a n c i a .E la n á l i s i sd e lim p a c t od ee s t er e q u e r im i e n toe ne ls i s t em ad em e d i c ió nd ep o s i c ió n e x c e d e nl o sa l c a n c e sd ee s t et r ab a jo . E nc u an toap e r t u rb a c i on e sd eb em o sd e s t a c a rq u el a sm a n io b r a ss ed e s a r r o l l a ne nl ad e n om in a d ab a j a c ap al ím i t ea tm o s f é r i c a ,e nl acu a ll atu r b u l e n c i an oe si s o t ró p i c as in oq u er e su l t am uyc o n d i c io n a d a p o rlo so b s t á cu lo s .S inem b a rg oe s ton oa l t e r ae ng e n e r a ll az o n ad ed e c a im i e n tod el aPSDd el a tu rb u l e n c i a ,qu ee sg ob e rn ad aeng en e r a lp o rp ro c e s o sd em e z c l av o r t i c o s a .U n aPSDt íp i c aesl a s ig u i e n t e : [ ] ,e nd o n d eS sl afu n c i ónd ed e n s i d ade sp e c t r a l( c om p o n e n t elo n g i t u d in a l ) ,fe sl af r e cu e n c i ae nH z ,y ue 2 σ sl av a r i an z ad el a sf lu c tu a c ion e sd ev e lo c i d a d(lo n g i tu d in a l ) .L af r e c u en c i aa d im e n s io n a lXu( z )e s u e fL ( z ) /U ( z ),endo nd eLe sl ae s c a l ain t e g r a lyze sl aa l tu r as o b r ee lt e r r e n oal ac u a ls er e a l i z al a 2 m e d i c ió n.V a l o r e st íp i co saun aa l t i tudd e c o nu n ain t e n s id a dd ev i e n tod e4 . 5m / ss o nσ u 2 2 = 3 . 3 2m / s, Lu= 36m.E lan chod eb and ae sd eap ro x im a d am e n t e : 7 5 D epa r tam en t od eA e r onáu t i ca 20 15-AñoIn t e rna c iona ld elaLu z 4 3 ra sJo rnada sITE- 20 15-Fa cu l tadd eIng en i e r ía-UNLP D e d u c im o sd ee s toqu eunan chod eb and ad e1H zp a r al afu n c ió nd es en s ib i l i d a dc om p l em e n t a r i a d e b e r í ap ro v e e rbu enr e c h a z oap e r t u rb a c i o n e sa tm o s f é r i ca s . L ae n e rg í ad el atu rb u l e n c i as ed aenm ov im i e n to sv o r t i c o s o sd ed im e n s io n e sc om p a r a b l e sas ue s c a l a in t e g r a l .A d op t an dol ah i pó t e s i sd eT ay lo rp a r al atu rb u l e n c i a,l o sr em o l in o sd em e n o rt am a ñ o p ro d u c e nf l u c t u a c ion e se nf r e cu en c i a sm á sa l t a s ,ys eg ú ne s t ad i s t r ib u c ió ne s p e c t r a lp o s e e nb a j a e n e rg í a .L ad i s t r i bu c ióne s p a c i a le sr e l ev a n t ep a r ae v a lu a rc o r t a n t e sd ev i e n toq u ep u d i e r a np e r t u rb a r l aa c t i tu dd e lv eh í cu lo .P a r ae s t ec a sol a sd im e n s io n e sd e lc u a d r i c ó p t e ros o nm u c h om e n o r e sal a e s c a l ad el atu rbu l en c i a ,p o rlocu a ll a sp e r t u rb a c i o n e sp o rtu rb u l e n c i as e r í a np o c or e l e v a n t e sp a r ae l c o n t ro ld ea c t i tud .Po rlot an tode lcon t r o ld ea c t i t u ds o lod em a n d a r em o se lm a y o ra n ch od eb a n d a a l c a n z a b l ed en t rod el a sl im i t a c io n e sim pu e s t a sp o rl a sl im i t a c io n e se nl aa c tu a c ió n . D a d oq u elo sm o to r e spu ed enen t r eg a runem p u j em á x im od e lo rd e nd e7Nys ee n c u en t r a ns ep a r a d o s p o ru n ad i s t an c i ad eu no s0 .4men t r ee j e sd er o t a c ió n ,c o nu nm om e n tod ein e r c i ad e lo rd e nd elo s 2 0 . 0 0 4k g .m pod r í am o sim pon e runa c e l e r a c ióna n g u l a rd eh a s t a .P a r au n aam p l i tu dt íp i c ad e l o rd e nd e0 . 1r adl af r e cu en c i aa l c an z ab l ep a r ae s t a b l e c e ru nm ov im i e n toa rm ó n i c od ero t a c ió ns e r í ad e u n o s1 3H z .Enb a s eae s t opod em o sa sum i rc om of a c t ib l eu na n c h od eb a n d ad e1 0H zp a r ae lc o n t ro l d ea c t i tu d,qu eno sd a r í au n aad e c u ad as ep a r a c ió ne nf r e c u e n c i ad e ll a z od ec o n t ro le x t e r io r .P a r as u im p l em e n t a c iónent i em pod i s c r e tos eu t i l i z a r áu n af r e c u en c i ad em u e s t r e od e1 0 0H z . D e f in i c i ónd eRu t a sp r og r amada s D e f in im o sl a sru t a sas e g u i rm e d i a n t eu n as e c u e n c i a d ep u n t o sd ec o n t ro l(w a y p o in t s) .P a r ac ad ap u n tos e d e f i n eu nr a d iod eem p a lm e .C o ne s to sp a r ám e t ro se l in t e rp o la d o rc a l c u l ae la r c on e c e s a r iop a r aem p a lm a r lo ss e gm e n to sr e c t i l ín e o sd el ap o l ig o n a ld e f i n id ap o r lo sp u n to sd ec o n t ro l . E nt i em p od ee j e c u c i ó ns eu s ac om op a r ám e t rol a d i s t a n c i ar e c o r r id as o b r el a ru t ap a r ad e f in i rl a p o s i c ió nd er e f e r en c i aenc ad ain s t an t ed et i em p o .L av e lo c i d a dd ea v a n c es ed e f in ep o rt r am o sos e in t e rp o l al in e a lm en t een t r ev a lo r e sa s ig n a d o sac ad ap u n tod ec o n t ro l . D e sd ee lp u n tod ev i s t ad e lcon s um od ee n e rg í a,u na r c od ec i r c u n f e r e n c i ae sl at r a y e c to r i aó p t im a p a r alo g r a r un d e t e rm in a doc am b io d erum b oc o nt i em p o syv e lo c id a d e sp r e d e t e rm in a d a s .S i n em b a rg op r e s en t aun ad i s c on t i nu id adenl aa c e l e r a c ió nl a t e r a la lr e a l i z a rl at r a n s i c ió nc o nu nt r am o r e c to .P o re lm om en tonos eh ad e f in i dou na lg o r i tm op a r as u av i z a rl at r a n s i c ió n ,c o nl oc u a ls e a co t a r í a nlo st r an s i t o r io se nl aev o lu c iónd el a sr e f e r e n c i a sd ea c t i tu dye nlo se r ro r e sd ep o s i c i ó ne n c a d aem p a lm e . C on t ro ld eT ray e c to r iayA c t i tud D e sd ee lp u n tod ev i s t ad e lcon t ro ld et r a y e c to r i a,e lv e h í c u loe su np u n to m a t e r i a ls o b r ee lc u a l ⃗ ⃗ ⃗ or e s t r ing id a. R e f e r id oau n at e rn ain e r c i a l : a c tu am o sco nun afu e r z a n ⃗ ⃗ ⃗ ⃗ ⃗ ⃗ ⃗e E nl ar e a l id ad⃗ s t ár e s t r ing id apo rl ím i t e sd ea c tu a c ió nm á x im asu p e r io rein f e r io re nsum ag n i tu d ,y s uo r i e n t a c i ónd eb eev o lu c ion a renf r e cu e n c i a sin t e r i o r e sa la n ch od eb a n d ad e lc o n t ro ld ea c t i t u d . E s to sa sp e c to sn osonin c lu id o se nun m o d e lol in e a l ,p orloc u a ld e b e ns e rc o n s id e r a d o se nl a d e f i n i c ió nd er e f e r en c i a sye sp e c i f i c a c i on e sd ed i s e ñ o. E lc o n t ro lp u e d een fo c a r s ed efo rm ad e s a co p l a d a.L o sc o n t ro l a d o r e sd ep o s i c ió nh o r i z o n t a ld e b e n in c lu i ra c c iónin t eg r a lp a r ar e ch a z a rp e r tu r b a c io n e sc o n s t a n t e sd e b id a sa lv i e n t om e d io .E lv e r t i c a l d e b ec a n c e l a re lp e soycom p en s a rp e r tu rb a c io n e sv e r t i c a l e sl e n t a s. 7 6 D epa r tam en t od eA e r onáu t i ca 20 15-AñoIn t e rna c iona ld elaLu z 5 3 ra sJo rnada sITE- 20 15-Fa cu l tadd eIng en i e r ía-UNLP P a r ae lc o n t ro ld ea c t i tu dt am b i énpod em o sd e s a c o p l a rlo st r e sg r a d o sd el ib e r t a dc o r r e s p o n d i e n t e s . ̇ { } [ ̈ } [⁄ ]{ } ⁄ ]{̇ se lam o r t ig u am i en toa e ro d in ám i c o ,q u ep o d em o sa s um i rn u lop a r aro t a c i o n e s E ne s t ae x p r e s ión e se lm om e n tod ec o n t ro lv i r tu a l . a l r e d ed o rd e le j ez ;m i en t r a squ e e L a sr e f e r e n c i a sp a r ae lco n t ro ld ea c t i tudd er o l id o / c ab e c e o y s u rg e nd el a sr o t a c i o n e sn e c e s a r i a s ⃗ ⃗.E e nlo se j e sxeyd el at e rn am óv i lp a r aa l in e a re le j ezc o nl ad i r e c c ió nr e c íp ro c ad e lv e c to r⃗ s t o s ⃗ ⃗ c á l c u lo ss o nr e a l i z ado spo re lb loqu eA1 a n t e sm e n c i o n a d oe nb a s eal a sc om p o n e n t e sd e lv e c to r⃗ p ro y e c t a d a senl at e rn am óv i l : ⃗ ⃗ ⃗ ⃗ ⃗ ⃗ ⃗ ̂ ̂ ̂ ⃗ ⃗ ⃗| . E s t a sr e l a c i o n e ss o nin d e t e rm in a d a sc u a n d o| . E ne s t o sc a so sa d o p t am o s v e c to rd em om en tov i r tu a l : P a r ae lc o n t ro ld ea c t i t u dn on e c e s i t am o sa c c ió n in t e g r a l ,p o rq u elo se r ro r e se ne s t a d oe s t a c io n a r ioq u e p u d i e r a ne x p e r im e n t a r s eq u e d an r e su e l to sp o re l c o n t ro ld et r a y e c to r i a . D e lo sd o sl a z o sd ec o n t r o ld ea c ti t u dd e f in im o su n ⃗ ⃗ ⃗ ⃗ ⃗ {} Ap a r t i rd e ⃗ ⃗ ⃗|y⃗ ⃗ ⃗ ⃗ ⃗pod em o sd e f i n i rl a sfu e r z a sr e q u e r i d a se nc ad aro to r : | { } [ ]{ } ( ) a sd i s t an c i a sd elo se j e sd elo sro to r e sa lc e n t rod eg r a v e d ad ;y e se lv e c to rd e ,e nd o n d e y sonl fu e r z a sd elo sc u a t roro to r e s .R e s t a r í aap l i c a ru no p e r a d o rd et r a s fo rm a c ió np a r ac o n v e r t i re s t a sfu e r z as e nv e lo c i d a d e sd eg i rod elo sr o to r e s ,s eg ú ns ec om e n tóa ld e s c r ib i rl ar e l a c ió ne n t r ev a r i a c io n e sd e em p u j eyv e lo c id add eg i ro .Nt i en eenc u en t ae lto rq u ea e ro d in ám i c oe x p e r im e n t a d oe ne le j ed el o s m o to r e s ;n oin c luy ee lt r an s i to r iod eb i doal a sv a r i a c i o n e sd em om e n toc in é t i c od elo sm o to r e s ,loc u a l d e b e r í as e rc on s id e r ad oenunr e f in am i en tod e lm o d e lop a r al ad in ám i c ad eg u iñ a d a . RESULTADOSYD ISCUS IÓN P a r ae lc o n t ro ld ea c t i t ud ,po rl as im p l e z ad e lm o d e lop l a n t e am o su n aa s ig n a c ió nd ep o lo sp a r ac ada e j es o b r ee lm od e lo( f r e cu e n c i an a tu r a l2H zyam o r t ig u am i e n to0 . 8p a r ae le j ez ;8H zy0 . 8 6p a r alo s e j e sxey ) .D eb et en e r s ee ncu en t aqu el ac ap a c id a dd ec o n t ro le ne le j ed eg u i ñ a d ae sr a d i c a lm e n t e d i f e r e n t eal ad econ t ro ld eho r i z on t e ,p e r oe s t en on e c e s i t ae s t a ra c o p l a d oc om ol a z oin t e rn od e l c o n t ro ld ep o s i c iónpo rloc u a lpu ed enr e l a j a r s elo sr e q u e r im i e n to se ncu a n toaan c h od eb a n d a . 7 7 D epa r tam en t od eA e r onáu t i ca 20 15-AñoIn t e rna c iona ld elaLu z 6 3 ra sJo rnada sITE- 20 15-Fa cu l tadd eIng en i e r ía-UNLP P a r ae lc o n t ro ld et r ay e c to r i as ed e f in enfu n c io n e sd es e n s ib i l id a dc om p l em e n t a r i ac o na n c h od eb a n d a d e lo rd e nd e1H z .D eb id oaqu en e c e s i t am o sa c c ió ni n t e g r a le nlo sc om p e n s a d o r e sp a r ar e c h a z a rl a c om p o n e n t ed ep e r tu r b a c ió ncon s t a n t ea s o c i a d aal av e lo c id a dm e d i ad e lv i e n to ,l ad in ám i c ad el a z o c e r r a d or e s u l t ad ecu a r t oo rd encong r a d or e l a t iv o2 .E s tot r a ea lg u n a sd i f i c u l t a d e s ,d a d oq u es e in c r em e n t al ano rm a ∞d el afun c iónd es en s ib i l id a d ,loc u a lim p l i c as o b r e p a s o se nl o st r a n s i to r io sy e v e n tu a lm e n t es a tu r a c iónd el a sa c c ion e sd eco n t r o la n t ep e r t u rb a c i o n e sin t e n s a s . C om ov a l id a c iónd e lc on c e p tod ed i s e ñoyd el a sh ip ó t e s i sd ec á l c u l or e a l i z am o su n as im u l a c ió nc o n M a t l a bS im u l ink® to t a lm en t eind ep end i e n t ed e lm o d e lo m a t em á t i c ou t i l i z a d op a r al as ín t e s i s .S e u t i l i z ae la lg o r i tm oe s t ánd a rd eS im u l ink( o d e 4 5 )c o nu nl ím i t es u p e r io rp a r ae lt i em p od ein t e g r a c ió n d e0 . 0 1 s . E ne s t as im u l a c iónre a l i z am o sl ain t eg r a c ió nn um é r i c ad i r e c t ad el a se c u a c io n e sc a rd in a l e sd el a m e c á n i c a,c ons im u l a c ióni nd ep end i en t ed el o se f e c t o se nc ad aro to r .P a r ae s t eú l t im ou t i l i z am o sd e fo rm ad i r e c t alo sr e su l t ad o sd elo sm od e lo sn um é r i c o sp a r al aa e r o d in ám i c a,l a sl im i t a c i o n e sd e l c o n t ro l a d o rylo se f e c to sin e r c i a l e sd e b i do sal a sv a r i a c io n e sd e lm om e n toa n g u l a rd e lm o to r . I n c lu im o st am b i éne f e c to sa tm o s f é r i co st a n to e nv a lo r e sd ev i e n t o m e d i oc om ov a r i a c io n e s e s to c á s t i c a spo rtu r b u l en c i a . E ls i s t em ad es en s a do ( INS y GNSS )a ú nn oe s t áa d e c u ad am e n t em o d e l a d o .C om op r im e r a a p ro x im a c ió ns ein c lu y óru idob l an cog au s i a n oe nl ab a n d a[0 , 1 0 0 ]H ze nl a sm e d i c io n e s ;c o nn iv e l e s rm sd e0 . 2 5 °p a r alo sáng u lo sy5 ° / sp a r av e l o c i d a d e sa n g u l a r e s .Sea sum eq u es ec u en t aa d em á sc o n u ns en s a d od ep o s i c i ónab s o lu t ain t eg r ad oc o nl o ss e n s o r e sin e r c i a l e s ,p a r aa l c an z a ru n ap r e c i s ió nd e a lm e n o s0 . 1m . E nl as im u l a c ións er ep ro du c el ae j e cu c ió nd eu np l a nd ev u e l oe ne lc u a ls ep l a n t e au n ar u t ad e a p ro x im a c ió nyun ap a s ad ad ein sp e c c ió na l r e d e d o rd el at o r r ed ea l t at e n s ió n ;p r im e roe nc o n d i c i o n e s m e t e o ro ló g i c a sd ec a lm aylu eg oan t eunv i e n t oe ns u p e r f i c i ed e1 0m / s( c e r c ad e2 0 k n t ,c o n d i c ió nF 5 e nl ae s c a l ad eB e au fo r t) . 40 z [m ] 30 20 10 0 30 20 10 0 -10 -20 y [m ] 0 40 20 60 x [m ] E nl a ss ig u i en t e sf ig u r a sv em o sa c t i tu d( a z im u t ,e l e v a c ió nyro t a c ió ne nro jo ,v e rd eya z u l )e nlo s e s c en a r io ss inv i e n to( i z qu i e rd a )yconv i e n t o(d e r e c h a ) . A c t i t u d 2 0 A c t i t u d 5 0 4 0 1 0 Az im ,E lev , Ro l l[° ] Az im ,E lev , Ro l l[° ] 3 0 0 1 0 2 0 2 0 1 0 0 1 0 2 0 3 0 3 0 4 0 0 1 0 0 2 0 0 3 0 0 4 0 0 5 0 0 t [ s ] 6 0 0 7 0 0 8 0 0 9 0 0 4 0 0 1 0 0 2 0 0 3 0 0 4 0 0 5 0 0 t [ s ] 6 0 0 7 0 0 8 0 0 9 0 0 E ll a sf ig u r a squ es ig u ens ev enl a sp e r t u rb a c i o n e sa tm o s f é r i c a s( a r r ib a )yl am ag n i tu dd e lv e c to re r ro r ( a b a jo )e nc ond i c ió nd ec a lm a(v e rd e )yc o nv i e n t o( a z u l ) .E nn e g ros ein d i c ae lt r am od eru t a c o r r e sp o n d i en t e . 7 8 D epa r tam en t od eA e r onáu t i ca 20 15-AñoIn t e rna c iona ld elaLu z 7 3ras Jornadas ITE - 2015 -Facultad de Ingeniería - UNLP Perturbaciones Atmosféricas 4 2 0 u,v,w[m/s] -2 -4 -6 -8 -10 -12 -14 0 100 200 300 400 t[s] 500 600 700 800 900 Error de seguimiento 0.8 0.7 0.6 error[m] 0.5 0.4 0.3 0.2 0.1 0 0 100 200 300 400 t[s] 500 600 700 800 La pasada de inspección se inicia aproximadamente a los 300 segundos. La velocidad de desplazamiento en este tramo es 1 m/s. Existen al menos dos condiciones para las cuales el modelo lineal es inválido: vehículo con momento cinético medio no-nulo (por ejemplo cuando hay un spin sostenido en el eje z) y condiciones de pérdida aerodinámica de los rotores. Podemos reproducir estas condiciones en la simulación. Si no se cuenta con control de guiñada, es fácil alcanzar estados con velocidades de rotación aun moderadas para las cuales el control de horizonte se inestabiliza. Se trata del mismo fenómeno de acoplamiento de inercia que condujo a varios accidentes en aeronaves experimentales de la serie X de la NASA, y puede estudiarse a partir de los términos cuadráticos despreciados en la linealización. Respecto de la condición de pérdida aerodinámica, esta puede inducirse por ejemplo con una inversión rápida en la velocidad de la referencia cuando la velocidad de avance es elevada. CONCLUSIONES La dinámica de un cuadricóptero responde claramente a un modelo no-lineal, tanto por efectos inerciales como aerodinámicos. Aun así, mediante una adecuada definición de especificaciones de diseño, bloques de asignación de control y restricciones en la definición de referencias, es posible utilizar los métodos del control clásico con modelos extremadamente simplificados. Los resultados muestran que para condiciones de viento moderado resulta difícil mantener la trayectoria dentro de las tolerancias propuestas originalmente, requiriéndose un ajuste más fino de los compensadores. Debe evitarse llevar el vehículo a una condición de pérdida aerodinámica limitando la velocidad de las referencias de posición. En el caso de preverse situaciones con velocidad media de rotación no nula debería implementarse un control de tipo LPV, o pasar directamente a esquemas de control no-lineal para manejar los acoplamientos de inercia en el control de actitud. REFERENCIAS 1. 2. 3. 4. 5. 79 G.C. Goodwin, S.F. Graebe, M.E. Salgado: “Control System Design”. Prentice Hall; 2001 D. Mc Lean: “Automatic Flight Control Systems”. Prentice-Hall; 1990 M.V. Cook: “Flight Dynamics Principles - A Linear Systems Approach”. Elvesier; 2007. T.I. Fossen: “Marine Control Systems”. Marine Cybernetics S.A. 2002 F.M. Hoblit: “Gust Loads on Aircraft: Concepts & Applications”. AIAA. 2001 Departamento de Aeronáutica 2015 - Año Internacional de la Luz 8