Bipolar Stepper Motor Driver Manual de usuario
Anuncio

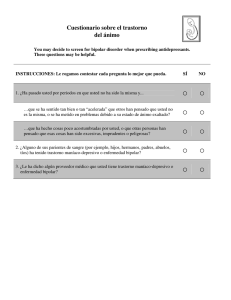
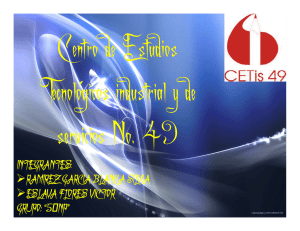
Todos los sistemas de desarrollo de Mikroelektronika disponen de un gran número de módulos periféricos, ampliando el rango de aplicaciones de los microcontroladores y facilitando el proceso de probar los programas. Aparte de estos módulos, es posible utilizar un gran número de módulos adiciononales conectados al sistema de desarrollo por los conectores de puertos de E/S. Algunos de estos módulos adicionales pueden funcionar como dispositivos autónomos sin estar conectados al microcontrolador. Manual de usuario Placa adicional Bipolar Stepper Motor Driver ™ MikroElektronika Bipolar Stepper Motor Driver Bipolar stepper motor driver La placa adicional Bipolar Stepper Motor Driver está diseñada a gobernar los motores paso a paso en modos completo, medio, 1/4 de paso y 1/8 de paso. La placa se puede utilizar como un dispositivo autónomo o conectada al microcontrolador. Para conectar Bipolar Stepper Motor Driver al microcontrolador en el sistema de desarrollo, es necesario utilizar un cable plano con el conector hembra IDC regular que se debe conectar a un puerto de E/S del sistema de desarrollo. Figura 1: Placa Bipolar Stepper Motor Driver Figura 2: Placa Bipolar Stepper Motor Driver conectada al sistema de desarrollo El funcionamiento de la placa Bipolar Steper Motor Driver se realiza al utilizar el circuito A3967SLB. Es un circuito integrado y especializado para excitar a los motores paso a paso con voltaje de hasta 30V y con corriente de hasta 750mA. El circuito dispone de la protección térmica, proteccion contra exceso de consumo y bloqueo de tensión mínima. Su modo de funcionamiento se determina por el estado lógico de 7 pines de entrada. Sus funciones se muestran en la Tabla1. Entrada Estado activo ENABLE# 0 STEP 0-1 RESET# 0 SLEEP# 0 Función Entrada activa baja habilita las salidas El motor avanza un paso con transición de bajo a alto en esta entrada. El tamaño de un paso es determinado por el estado de las entradas MS1 y MS2. Entrada activa baja apaga todas las salidas. Las entradas en el pin STEP se ignoran hasta que la entrada RESET esté a alto. Entrada de control activa baja se utiliza para reducir el consumo de potencia al no utilizar el circuito. MS1 0/1 Seleccionar el modo de funcionamiento del motor paso a paso (Tabla 2) MS2 0/1 Seleccionar el modo de funcionamiento del motor paso a paso (Tabla 2) DIR 0/1 El estado de esta entrada determina la dirección de rotación del motor. Tabla 1: Descripción funcional de los pines de entrada de Bipolar Stepper Motor Driver La placa Bipolar stepper motor driver dispone de dos bobinas separadas (A y B). Los terminales de bobinas se deben conectar a los conectores CN3 y CN4 (pines OUT1A, OUT1B, OUT2A y OUT2B). El voltaje utilizado para excitar las bobinas se lleva al conector CN2. Su valor máximo es hasta 30V. Figura 3: Esquema de conexión de la placa Bipolar Stepper Motor Driver MikroElektronika Bipolar Stepper Motor Driver Al utilizar la placa adicional Bipolar Stepper Motor Driver, es posible excitar el motor en varios modos de paso. El tamaño de un paso (resolución) eqivale al movimiento de un rotor generado por un pulso en la entrada. La resolución se determina por el estado lógico en las entradas MS1 y MS2 como se muestra en la Tabla 2. MS1 0 1 0 1 MS2 0 0 1 1 Resolución Paso completo Paso medio 1/4 de paso 1/8 de paso (8 micropasos) Tabla 2: Resolución en cuatro modos Figura 4: Modo paso completo: MS1=0, MS2=0, DIR=1 Figura 5: Modo paso medio: MS1=1, MS2=0, DIR=1 Figura 6: Modo 1/4 de paso: MS1=0, MS2=1, DIR=1 Figura 7: Modo 1/8 de paso (8 micropasos): MS1=1, MS2=1, DIR=1 MikroElektronika