Transmisiones para embarcaciones rápidas
Anuncio

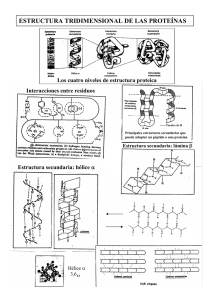
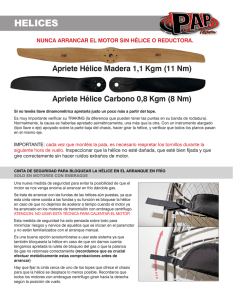
TRASMISIONES MARINAS PARA EMBARCACIONES RAPIDAS M. Sc. Medina Muiño Jorge Félix SIME Dr.CT. Medina Castillo José C.I.D. NAV. RESUMEN El trabajo aborda la temática de las diferentes trasmisiones marinas que se emplean como medios de propulsión tales como: hélices, hidrojet y Arneson. Principios básicos de funcionamiento, ventajas, desventajas, campo de aplicaciones. Tendencias mundiales. INTRODUCCIÓN Requerimientos de propulsión. El primer medio de trasporte desde que el hombre surgió en la tierra, desechando en propio caminar del hombre antiguo sobre sus pies, fue el trasporte marítimo. El hombre subió sobre un árbol que arrastraba la corriente sobre el rió y lo llevo al otro lado, posteriormente ayudado por una vara o remo. Desde entonces el hombre a desarrollado diversos tipos de embarcaciones y medios para propulsarlos. Fig 1 Ejemplos de embarcaciones y propulsores Los distintos medios de propulsión que brevemente serán abordados son las trasmisiones con hélices fijas, variantes de motores fuera de borda y con cola, trasmisiones a chorro de agua y finalmente trasmisiones llamadas Arneson. Fig 2 Tipos de propulsores para embarcaciones veloces Hélices Fig 3 Partes de la hélice Historia y diseño de hélices. La historia de las primeras aplicaciones de las hélices vienen de las aplicaciones de Arquímedes con su invento de la bomba de tornillo también diseñada para suministrar agua para irrigación. También dibujos de Leonardo da Vinci. La rueda impelente que movía molinos de trigo y barcos a vapor fue trasformándose gradualmente en la hélice que conocemos hoy. ¿Cómo funcionan las hélices? Como él alabe o el aspa de la hélice rota a través del agua, se crea un área de alta presión en un lado del alabe o aspa y un área de baja presión del otro lado del propio alabe o aspa. La hélice se mueve hacia el área de baja presión impulsando el bote con ella. Las hélices modernas incluyen aplicaciones de 3, 4 y 5 alabes en materiales que van desde el aluminio, bronce, acero inoxidable y plástico. En 1959 la fabrica VOLVO PENTA saco al mercado un sistema de propulsión revolucionario que combinaba los motores internos y externos resulto lo que ellos denominaron la Serie Aquamatic de motores internos con cola (inboards-stern drive). En 1982 la fabrica VOLVO PENTA saco al mercado un nuevo diseño revolucionario que incremento dramáticamente la eficiencia, rendimiento y ahorro de combustible de los sistemas de propulsión marinos especialmente los motores internos con cola (inboards-stern drive) que llamo Duo-Prop, que no es mas que un par de hélices coaxiales contrarrotativas. Motores fuera de borda. Cada embarcación en dependencia de su diseño e intenciones de uso requerirá diferentes tipos de propulsión. La mayoría de las embarcaciones recreativas de menos de 20 pies de eslora en los Estados Unidos actualmente usan motores fuera de borda. Estos motores son los más populares y de amplio uso en pequeños botes, son ligeros, poderosos y los más modernos son extremadamente silenciosos. Son una unidad compacta donde viene todo el motor, la trasmisión. el eje y la hélice. Se montan generalmente en el espejo de popa (Transom) del bote sin embargo, usted puede encontrar diseños que incorporan un (bracket), en el cual el motor se monta. El motor completo gira suministrando un gobierno fácil cuando la popa es empujada por el giro de la hélice. Son suministrados en un amplio rango de tamaños y potencias pueden usar diferentes fuentes de combustibles. Desde motores eléctricos pequeños, motores de 2 ciclos, con mezcla gasolina-aceite, motores de 4 ciclos para gasolina solamente, además de motores diesel, la selección es amplia. Actualmente los fabricantes suministran hélices contrarrotativas para una mejor rumbo y maniobrabilidad. Motores con cola (Stern drive engines). Estos motores son generalmente mas pesados que los fuera de borda. Ellos consisten de un motor montado interiormente y una cola o (lower unit) colocada bajo el espejo de popa o escudo. La cola gira de un lado a otro para suministrar el gobierno del bote, ella puede bajar para permitir al bote que navegue en bajos fondos. Existen modelos de gasolina y diesel más grandes y poderosos que los motores fuera de borda. Estos motores son similares a un pequeño motor de automóvil, fácilmente accesible y poderoso. Este tipo de motor a menudo es escogido para botes más grandes que los fuera de borda. Motores interiores. Fig 6 Estos son los más populares en embarcaciones de más de 26 pies de eslora. El motor es montado dentro de la embarcación hacia el centro para dar una buena distribución de peso. El motor se conecta directamente a la trasmisión la cual se acopla al eje el cual pasa a través del casco del bote, por la bocina (prensa estopa). Al eje se le coloca la hélice, la cual al girar impulsa el bote. En este sistema como el eje esta fijo no gira de lado a lado, una pala de timón es instalada detrás del eje y la hélice para deflectar el flujo de agua para lograr la gobernabilidad del bote. Historia de los propulsores mediante chorro de agua, Jetsboats o WaterJets. Para el recién llegado él termino “Jet Boat” podría potencialmente sugerir una embarcación impulsada por un motor complejo de alta potencia como un avión moderno de velocidad. Esencialmente “Jet Boat” es una embarcación normal con un motor fijado que mueve una bomba de agua o (Jet Unit). El agua es arrastrada a través de una admisión en el fondo del casco y forzada a salir a alta presión (como un Jet) a través de un agujero exterior trasero. Diferente a un bote a motor convencional, el bote no tiene hélice ni timón. En cambio es impulsado simplemente por el empuje de la corriente de agua que sale por la parte trasera. Análogamente a un surtidor de jardín o máquina de riego. Los botes “Jet Boat” son una perfecta ilustración de la tercera Ley de Newton. ¿ Quién invento los “Jet Boat”?. La controversia ha estado intensa sobre esta pregunta un campesino criador de ovejas en Nueva Zelandia Bill Hamilton ha dicho ser su inventor, pero el mismo nunca a hecho ninguna reclamación legal. El dijo en respuesta a un periodista critico en 1962 “Yo no reclamo el invento de la propulsión marina Jet el honor probablemente pertenece a un señor llamado Arquímedes ”. Hace 250 años a.n.e. el físico griego Arquímedes soñó con una embarcación con water-jet y se acerco al concepto cuando el invento el tornillo para elevar el agua. Posteriormente el concepto fue retomado a partir de los siglos XVI, XVII, XVIII, XIX y XX sobre todo en Gran Bretaña por diversos inventores, el tipo mas avanzado de bomba fue diseñada por Henny Bessemer, en Londres en 1849, este fue una bomba de flujo axial de simple succión. Medio siglo después Charles William Feilden (Bill) Hamilton tuvo el genio, la pasión y fuerza de carácter necesario para el éxito. Nació en 1899, Bill Hamilton, paso sus primeros 21 años aislado en una granja de ovejas in South Canterburg, New Zealand. Estudio libros, descubrió, inventó, desarrollo varios prototipos. La primera unidad producida fue instalada en un casco de 4.8 metros que era impulsado por un motor de 6 cilindros y 65 h.p. el cual alcanzo hasta 45 km/h construido en 1955. En 1957 logra un hidrojet con las características actuales capaz de alcanzar 80 km/h y con esto atrajo la atención del mundo entero. Jet Drive. El uso del sistema propulsivo por chorros de agua esta creciendo rápidamente. En los sistemas propulsivos por expulsión de un chorro de agua, el empuje necesario, para que el buque avance con una determinada velocidad, se produce acelerando una masa de agua. La variación de la cantidad de movimiento del flujo de agua, que evoluciona por ese sistema, proporciona la fuerza necesaria, para propulsar vehículos marinos. ¿Cómo funciona el water-jet? En los últimos 40 años se ha desarrollado un nuevo sistema de propulsión que, actualmente, se utiliza con gran frecuencia, para procurar el empuje que es necesario, para que las embarcaciones rápidas avancen por el agua del mar. Existen diversas maneras de tomar el agua de mar, sí bien, una de las más generalizadas. Fig 7 Este tipo de “waterjet” recibe el nombre de “inlet”, o toma a ras del casco, ya que esa toma de agua se encuentra en la parte inferior de la carena, en la zona de popa. La velocidad del flujo en la entrada del conducto de aspiración depende de la forma que tiene el barco. El principio de conservación de la cantidad de movimiento, junto con el teorema de la acción y reacción, constituyen la base que ha permitido aplicar la propulsión por chorro de agua (waterjet) a la industria naval. Una determinada masa de agua del mar es absorbida mediante una bomba de aspiración, siendo posteriormente acelerada en la tobera y expulsada de nuevo al mar por un conducto de pequeño diámetro, provocando la reacción del agua de mar, que se halla en reposo, produciéndose, así, el empuje necesario, para conseguir propulsar la embarcación. En las tomas de agua a ras del casco, el flujo se curva para ser embarcado, por lo que existe el riesgo de que sea ingerida cierta cantidad de aire, si el calado en popa es pequeño. Ellos vienen acoplados a motores interiores que toman el agua. Esta masa de agua es ingerida a través del conducto, cuya entrada es orificio, “inlet”, practicado en la parte baja de al carrena del buque. Una bomba, es accionada, mediante un eje, por el motor principal, que suministra la potencia necesaria que mueve el impelente situada en el interior del conducto, aspira agua del mar, y la hace llegar a la tobera donde se acelera, para ser expulsada a una gran velocidad. que impulsa el bote hacia delante. La tobera gira para permitir la maniobrabilidad al bote. Elegir el sistema de propulsión correcto para un bote es un asunto muy importante. El peso y la potencia ambos tienen un impacto sobre la eficiencia de su embarcación. Si su embarcación esta por debajo de la potencia su motor trabajara duro continuamente y suministrara baja eficiencia. Adicionalmente si su embarcación esta por encima de la potencia puede excederse la velocidad de operación segura para la cual fue diseñada la embarcación. Como consecuencia de ello, los ensayos que deben realizarse, para analizar ese sistema propulsivo, son más numerosos que los de una carena, propulsada con una hélice convencional, puesto que tienen que conocerse las características particulares de cada componente del “waterjet”, conducto de aspiración, bomba y tobera. El estudio de la propulsión con los “waterjets” es mas complicado que el caso de una hélice convencional, puesto que los elementos que intervienen, para proporcionar el empuje que necesitan estos barcos, están incorporados en el interior de un conducto, situado dentro de la carena, por donde evoluciona el flujo de agua. Los modelos deben ser geométricamente semejantes al buque, aunque el sistema propulsivo que se instala, bomba, no precisa conservar la escala empleada para las formas. La predicción de las características hidrodinámicas de los buques debe basase en cálculos, donde elementos como, “inlet”, difusor, bomba, y tobera se analizan juntos, para elaborar una predicción con garantías fiables. Ventajas: Estos sistemas de propulsión tienen la ventaja de no tener hélice que causan un peligro potencial a las personas en el agua y la vida marina. Este sistema de propulsión tiene gran utilidad en mares con poca profundidad y en aguas contaminadas, donde los propulsores y los apéndices podrían ser dañados, al tocar el fondo, o colisionando con escombros flotantes. Este tipo de propulsión no necesita que se incorporen apéndices, como arbotantes, timones, etc., por ello la resistencia al avance será menor que la de un barco propulsado con un hélice convencional. Waterjets por Twin-Disc Inc Fig 8 Aplicaciones: Los fabricantes de Twin-Disc tienen una línea de 11 modelos de waterjet cuya potencia de salida va desde 300 hasta 2000 h.p. Se ofrecen diseños modulares e instalados en el agua sin costo de varada. Ellos instalan (transom) o escudos en todo tipo de configuraciones de cascos sin tener que cortar o perforar el casco por puntos críticos como en la línea de flotación, con bajos costos en precios, sobre aluminio, acero o fibra de vidrio. La integridad del casco no se compromete. El sistema de gobierno es totalmente sellado, requiere de un esfuerzo mínimo para ser operado. La descarga del flujo turbulento es minimizada, canalizando el 100 % del empuje disponible dentro del esfuerzo del sistema de gobierno. El empuje en marcha atrás o reversible permite excelente maniobrabilidad en cualquier ángulo de gobierno. Se instalan en Ferrys, lanchas patrulleras, motos acuáticas entre otras embarcaciones. La mayoría de los (watercraft) personales usan jet drives Fig 9 ¿Por que Arneson Surface Drives? Ellas han sido diseñadas para resolver algunos de los problemas relacionados con los sistemas de ejes convencionales cuando se instalan sobre embarcaciones con velocidades que exceden los 35 nudos. Aspectos técnicos de la instalación. El diseño de la hélice tradicional y su selección es casi siempre un ejercicio de compromiso entre el diámetro y otros muchos parámetros que limitan la eficiencia. La teoría de momento básico nos dice que para dar velocidad y empuje, la hélice grande es más eficiente. La holgura entre la punta del aspa y el casco, el máximo calado de la embarcación, el ángulo del eje, la colocación del motor todos tienden a limitar el máximo posible el diámetro de la hélice considerándolo más pequeño que el tamaño optimo. El diámetro de la hélice es simplemente el máximo que se elija, algunas veces ello puede resultar en un considerable sacrificio de la eficiencia propulsiva o si esos limites geométricos de diámetro de hélice son excedidos el resultado puede ser una vibración excesiva y daño debido a una poca holgura entre la hélice y el casco o a un ángulo de eje muy empinado con severas perdidas de eficiencia. Las hélices de superficie instaladas con un sistema de propulsión articulada esta libre de estas limitaciones de diseño. Realizaciones técnicas y beneficios. Fig 10 Razones de articulación Trimado La capacidad para trimar arriba y/o abajo se obtiene a través de un cilindro hidráulico llamado “trim cylinder”. La habilidad para trimar la Arneson Surface Drives (A.S.D.) permite cuando las hélices están sumergidas igualarse a la salida de potencia del motor, por lo tanto mas potencia se convierte en empuje producido mientras el motor esta operando cerca o en su coeficiente de curva de potencia. Las hélices sumergidas pueden ser ajustadas mientras navega, permitiendo la selección del optimo ángulo de empuje variando la carga y las condiciones del mar. Gobernabilidad, control y respuesta son maximizados cuando la hélice esta en función de la fuerza direccional esencial. A diferencia del sistema convencional que el vector empuje de la hélice un timón externo en (A.S.D.) el ángulo de la hélice esta en la correcta dirección del movimiento. Porque el vector empuje y el vector gobierno tienen igual dirección permitiendo un gran control y permiten girar en ángulos mas cerrados. Un sistema convencional de hélices bajo el agua si esta bien diseñado puede permitir una eficiencia o rendimiento a un máximo de velocidad sobre 35 nudos y en unos pocos casos hasta 40 nudos. Para navegar a 40, 50 y 60 nudos usted tiene que dejar el sistema de propulsión convencional de hélice totalmente sumergida atrás y adoptar el sistema (A.S.D.). Timones, ejes expuestos, núcleos de hélices todos contribuyen al arrastre y producen fricción durante la navegación. Se encuentra entre los más eficientes sistemas de propulsión mariana en el mundo. Este sistema de diseño de hélice reduce el aumento de calado hacia popa o sea el arrastre en un 50 % comparado con los sistemas tradicionales de hélice sumergida. Solamente las caras de las hélices entran en contacto con el agua se produce una protección del talón de la quilla. Esto resulto en mas velocidad, aceleración más rápida, mejor carga útil, mejor relación de potencia y mejor economía de combustible. Existen 10 modelos y varias configuraciones para cada modelo, disponibles en aluminio y fundición de bronce. Ventajas: z Incremento de la velocidad respecto a los sistemas convencionales en un 15 y 30 % z Incremento de la eficiencia de combustibles en un 15 y 30 % z Más eficientes que los motores interiores de cola z Aplicaciones adaptabilidad de tamaño desde 100 h.p. hasta 10 000 h.p. z Poco mantenimiento z Habilidad para ajustar las hélices sumergidas mientras navega, ajustar e igualar la salida de potencia del motor para mas empuje de acuerdo a las necesidades. z Hélices ventiladas o aireadas hacia la superficie mejora la cavitación bajo el casco reduce el ruido que destruye el casco y erosiona la hélice z Menos vibraciones que los sistemas outboards y inboards. z Navegación por aguas poco profundas (eliminación de los apéndices bajo el agua), él (A.S.D.) tiene hélices trimables y no fijas a apéndices bajo el agua, requiriendo significativamente menos calado que los cascos movidos por sistemas convencionales. z Accesible mantenimiento de la hélice z Modelos disponibles en bronce al magnesio y aluminio z No limitaciones en ángulo de ejes, holgura máxima de altura de aspa de hélice, calado para la selección de restricciones de optimo diámetro de hélice z Adaptable a un amplio rango de aplicaciones motores: gas y diesel. • z Eje de la hélice trimable, el eje de la hélice es verticalmente ajustable permitiendo la selección del optimo ángulo de empuje variando la carga y las condiciones del mar. Maniobrabilidad y empuje positivo, a diferencia de los sistemas convencionales en que el vector hélice, empuje y pala timón en el sistema (A.S.D.) el ángulo de giro esta en el ángulo de movimiento maximizando el sistema de gobierno. Las hélices estas localizadas atrás, detrás del casco incrementando el gobierno a todas las velocidades. Desventajas Como aspecto en contra el sistema (A.S.D.) presenta un alto costo económico he aquí algunos precios de algunos modelos. Tabla 1 Single Drive Package Dual Drive Package ASD6AIS $7,271 ASD6AIS $14,542 ASD8BIL $11,207 ASD8BIL $22,414 ASD10BIL $18,173 ASD10BIL $36,346 ASD12BIS $30,311 ASD12BIS $61,422 ASD14BIL $44,225 ASD14BIL $88,450 Aplicaciones: Las Arneson Surface Drives (A.S.D.) su inventor fue Howard Arneson el primer modelo se construyo en 1980. Desde el primer momento que fue introducido en el circuito de carrera mundial de fuera de costa (off shore races), triunfo, pero no solo se emplea en circuitos de carrera desde 1980. Muchas embarcaciones han sido diseñadas con este sistema que se ha convertido en el más popular, mas de 20 organizaciones gubernamentales han reconocido los avances de este sistema y han construido sus embarcaciones con fines comerciales y militares como Catamaranes, Ferrys y Patrulleras. En 1992 Twin-Disc Inc uno de las mayores compañías en el campo marino de la propulsión adquirió y distribuye (A.S.D.), ofrece modelos para motores de gasolina hasta 5200 r.p.m. y aproximadamente 1485 h.p.; Motores Diesel hasta 2400 r.p.m. y aproximadamente 5000 h.p. y Turbinas de Gas hasta 10 000 h.p. Todas estas aplicaciones están sujetas a coordinaciones con los fabricantes. Conclusiones Como hemos apreciado a cada tipo de embarcación le corresponde un tipo de propulsión o trasmisión marina. Estas han evolucionado desde que el hombre comenzó a navegar. El propósito de la embarcación o sea el fin para el que se construye es fundamental a la hora de decidir su trasmisión o forma de propulsión, no es lo mismo un supertanquero para cargar hidrocarburos que una lancha rápida que una moto acuática. Así como dentro de una misma familia o tipo de embarcación por ejemplo lanchas rápidas elegir una trasmisión u otra de acuerdo a la velocidad deseada y tipo de casco por solo mencionar dos aspectos. En la medida que las tecnologías se hagan más rentables económicamente y se popularicen cada vez mas sistemas de propulsión por chorro de agua y sistema Arneson se iran imponiendo no solo en los terrenos que ya dominan sino también en algunos nuevos horizontes. Todos las trasmisiones marinas tienen sus ventajas y desventajas de acuerdo con sus propósitos y a cada una le toco, le toca, y le tocara un papel mas o menos predominante en la historia de la propulsión marina. Aunque el anhelo de mayores velocidades sigue siendo un objetivo importante de los distintos medios de trasporte. Sobre todo en embarcaciones pequeñas, de recreo, de trasporte de pasajeros e inclusive militares. Bibliografía: z Enciclopedia Encarta 2000 z Paginas en Internet encontradas bajo las palabras claves que aparecen a continuación en los diversos buscadores como Google Arneson Surface Drives Propulsión Requirements Jet Boats Waterjets Propellers Outboar Inboar Sterndrive z Revista Ingeniería Naval Enero 2000 z Revista Ingeniería Naval Octubre 1998