Plan del taller.
• 1) Organización de la plataforma. -> Actores + Sala de Juego y
servicios para facilitar la escritura de los modelos.
• 2) Entorno de desarrollo. Lazarus - freepascal
• 3) La Función de Costo Futuro.
Uso de la clase: Administrador del espacio de estados.
• 4) Algoritmo de programación entera mixta MIPS.
Uso de la clase TMIPSimplex. – Debugger del Simplex.
• 5) Tratamiento de "lo estocástico". CEGH
• 6) Detalle de los diferentes modelos ya implementados.
• 7) Desarrollo de un modelo nuevo. – CENTRAL DE BOMBEO
• 8...:) Optimización en un cáscara de nuez.
Convexidad-Relajaciones-Dualidad-SDP&SDDP.
SimSEE por dentro – parte 4
Uso de la clase TSimplex y el debugger testSimplex.
Reescribir el ejemplo de riego.
Para resolver el paso con TSimplex.
Agregar probabilidad de falla del vecino y costo de falla.
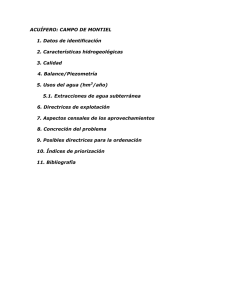
Ejercicio de aplicación.
Sistema de riego.
Uniforme 0,5Hm3/día
Vecino.
5 kUSD/Hm3
12 Hm3
Demanda
0,4 Hm3/día
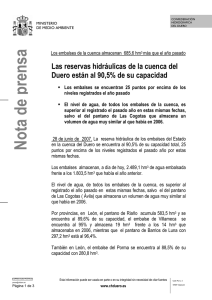
Optimización
Del último al primer
paso de tiempo
PrepararPaso_as
Para cada crónica
SorteosDelPaso
Para cada estrellita
del espacio de estados
PosicionarseEnEstrellita
Resolver paso
Act. <CF> de la Estrellita
PrepararPaso_ps
ArmarProblema
MIP_Simplex
LeerSolucion
NecesitoIterar
Si
Tabla del problema.
x1
x2
…
xnv
1
R1
a11
a12
…
a1nv
b1
>=0
R2
a21
a22
…
a2nv
b2
=0
…
…
…
…
…
…
…
RM
am1
am2
…
amnv
bm
>=0
-fc
-c1
-c2
…
-cnv
m= NRD+NRI.
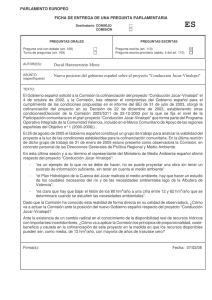
Operación del sistema.
“en bucle cerrado = bajo control”
r(t)
X(t)
u(t)
sistema
Operador
y(t)
Política de uso de los recursos
•¿Qué?
•¿Cuándo?
•Costo presente vs. futuro.
•Incertidumbre.
•Valor Esperado y Riesgo.
u=u(X,r,t)
Costo Futuro = CF(X,t)
Dada una política siempre puedo simular y calcular CF(X,t)
Evolución del Estado
X k +1 = f ( X k , uk , rk , k )
Esa ecuación captura “la dinámica del sistema”.
NO-LINEAL y VARIANTE EN (t)
Entradas no-controlables r(t)
• Determinísticas y/o Aleatorias.
• SIN ESTADO. Si son procesos aleatorios
con memoria, debemos identificarlos y
representar su estado como estado del
sistema.
Costo Futuro y Costo de Etapa
∞
CF ( x,U k , Rk , k ) = ∑ q
U k = {uk , uk +1 ,.....}
j =k
j −k
⋅ CE (x j , u j , rj , j )
Rk = {rk , rk +1 ,.....}
x j +1 = f (x j , u j , rj , j )
Ecuación de transición
Costo Futuro y Costo de Etapa
CF ( x , U k , R k , k ) = CE ( x , u k , rk , k ) + q ⋅ CF ( x ′, U k + 1 , R k + 1 , k + 1)
x ′ = f ( x , u k , rk , k )
Tasa de descuento
DurPaso / DurAño
1
q=
1+ α
α =Tasas de descuento anual.
por ejemplo α = 0.12 ; (12% )
.... mhhh???
Programación Dinámica
Estocástica.
rk
xk +1
xk
CE ''
CE '
(
)
CF (x , k + 1)
CF x '' , k + 1
'
t
uk
Maldición de la dimensionalidad.
x1k +1
x1k
x 2k +1
x 2k
kT
(k + 1)T
N1 × N 2 × .... × N nx
t
 0
0