¿Cómo medir un conjunto? La teor´ıa de Brunn
Anuncio

Capı́tulo 2
¿Cómo medir un conjunto? La teorı́a de
Brunn-Minkowski
TEMARIO
Lección
Lección
Lección
Lección
Lección
Lección
Lección
2.1
2.2
2.3
2.4
2.5
2.6
2.7
La suma de Minkowski.
El volumen y el área de superficie. Los volúmenes intrı́nsecos.
Los volúmenes mixtos.
La desigualdad de Brunn-Minkowski y otras desigualdades.
Otras medidas geométricas. Problemas de optimización
La simetrización de Steiner.
Las simetrizaciones central, de Schwarz y de Blaschke.
a Teorı́a de Brunn-Minkowski es el centro de la Geometrı́a de los Cuerpos Convexos. Tuvo su
L
origen, como tal, en la Tesis de Hermann Brunn en 1887 y es, en su parte más esencial, creación
de Hermann Minkowski alrededor del cambio de siglo. Precisamente, el 10 de Diciembre de 1900,
Minkowski escribió a David Hilbert informándole de que su estudio sobre el área de superficie y
el volumen en R3 estaba completo, siendo su avance más importante la introducción de una idea
asociada a tres cuerpos convexos que él denominó, provisionalmente, sus volúmenes mixtos.
Si queremos definir brevemente la Teorı́a de Brunn-Minkowski, podrı́amos decir que ésta es el
resultado de combinar y asociar dos nociones elementales para los conjuntos del espacio euclı́deo:
la suma vectorial y el volumen. La suma vectorial o de Minkowski, combinada con el volumen, nos
conduce a la noción de volúmenes mixtos y a la desigualdad fundamental de Brunn-Minkowski,
quizá la desigualdad más conocida relacionando el volumen de conjuntos convexos compactos.
20
¿Cómo medir un conjunto? La teorı́a de Brunn-Minkowski
Pero podemos remontarnos mucho más atrás en el tiempo, y encontrar cuestiones que también se
enmarcarı́an en esta teorı́a; Aristóteles (384-322 A.C.) se formuló la siguiente pregunta:
¿por qué el sol, cuando brilla a través de un cuadrado, no produce formas rectangulares sino
cı́rculos, tal y como sucede en el caso en que éste brilla a través de una cesta de mimbre?
Una cuestión similar, debida a Tycho Brahe (1546-1601), trata sobre la imagen que toma el sol
sobre la pantalla de una cámara oscura, dependiendo de la forma del diafragma.
Sol
(
Utilizando de manera implı́cita la suma de Minkowski, Kepler (1571-1630) resolvió el problema
de Brahe demostrando que, en nuestra terminologı́a, la imagen del sol es de la forma K + λB2 ,
donde K es una figura convexa, un trasladado del diafragma. En definitiva, el hecho sorprendente
que se esconde detrás de tal efecto es que, cuando el sol pasa a través de una abertura que tenga la
forma de un determinado conjunto K, la imagen que éste produce es, precisamente, la del llamado
conjunto paralelo exterior de K, es decir, la suma vectorial (o de Minkowski) de K y un cı́rculo de
un radio adecuado. En 1840, Jakob Steiner calculó el área de esta figura (ası́ como el volumen del
correspondiente objeto en R3 ), lo que podrı́a considerarse el inicio real de toda esta teorı́a.
El libro de Bonnesen y Fenchel de 1934 ([?]) fue el primer estudio sistemático que se llevó a
cabo sobre Teorı́a de Brunn-Minkowski; en él se recogı́a lo que era ya una impresionante colección
de resultados, aunque todavı́a estaba por llegar un importante crecimiento durante los años treinta
y posteriores, gracias a los trabajos de Aleksandrov, Hadwiger, Schneider y otros muchos.
2.1.
La suma de Minkowski
Sumario. La suma de Minkowski. Propiedades.
l propósito de esta sección es llevar a cabo un estudio sistemático de la suma vectorial de
E
conjuntos o suma de Minkowski, que de una u otra forma ya nos ha aparecido en capı́tulos anteriores.
Definición 2.1. La suma de Minkowski de dos conjuntos cualesquiera A y B de Rn se define como
[
A + B = a + b : a ∈ A, b ∈ B =
(A + b).
b∈B
Proposición 2.2.
(i) La suma de Minkowski conserva la convexidad y la compacidad.
(ii) Vista como una aplicación de C n × C n −→ C n , la suma de Minkowski es continua.
2.2 El volumen y el área de superficie. Los volúmenes intrı́nsecos.
21
(iii) Kn con la suma de Minkowski verifica la ley de la cancelación.
(iv) Si K y L son dos politopos, entonces el conjunto suma K + L es también un politopo.
Otras propiedades válidas para subconjuntos arbitrarios A, B y C de Rn , no necesariamente
convexos, son las siguientes (λ y µ son números reales positivos):
(A ∪ B) + C = (A + C) ∪ (B + C),
(A ∩ B) + C ⊂ (A + C) ∩ (B + C),
(A ∪ B) + (A ∩ B) ⊂ (A + B),
λA + λB = λ(A + B),
λA + µA ⊃ (λ + µ)A.
Si se exige convexidad en los conjuntos iniciales, se puede afirmar aún más:
Lema 2.3. Sean K, L, C cuerpos convexos de forma que K ∪ L también es convexo. Entonces
(K ∩ L) + C = (K + C) ∩ (L + C),
K + L = (K ∪ L) + (K ∩ L),
y además, λK + µK = (λ + µ)K.
2.2.
El volumen y el área de superficie. Los volúmenes intrı́nsecos.
Sumario. El volumen (área). El área de superficie (perı́metro). Fórmulas de Cauchy y Minkowski para el área de superficie. El polinomio de Steiner. Quermassintegrales y volúmenes intrı́nsecos. Valuaciones. El Teorema de Hadwiger.
2.2.1.
El volumen de un cuerpo convexo.
l volumen n-dimensional de un cuerpo convexo K en R es su medida de Lebesgue en R . Si
E
n = 2, vol(K) = A(K) se denomina área de K. El volumen verifica las siguientes propiedades:
n
n
– vol(K) se mantiene inalterado bajo movimientos (rı́gidos) de K.
– vol(µK) = µn vol(K), para µ ≥ 0.
– vol(K) = 0 si, y sólo si, K tiene dimensión menor o igual que n − 1.
– El volumen depende continuamente de K.
– Si K ⊆ K 0 , entonces vol(K) ≤ vol(K 0 ). La igualdad se da si y sólo si vol(K 0 ) = 0 ó K ≡ K 0 .
– Si T : Rn −→ Rn es una transformación afı́n dada por T (x) = M x + b, donde M es una
matriz n × n y b ∈ Rn , entonces vol T (K) = det M vol(K).
22
¿Cómo medir un conjunto? La teorı́a de Brunn-Minkowski
Proposición 2.4. Sea K un cuerpo convexo de Rn . Dado un vector unitario u ∈ Sn−1 , represen
tamos por Kt = K ∩ Ht (u), donde Ht (u) = x ∈ Rn : hu, xi = t . Entonces,
Z ∞
voln−1 (Kt ) dt.
(1)
vol(K) =
−∞
Utilizando este método se puede calcular el volumen de algunos conjuntos convexos particulares:
1. El volumen de un conjunto cilı́ndrico K = L + [0, z], esto es, la suma de un conjunto convexo
L (que suponemos contenido en H0 (u)) y un segmento [0, z] = {λz : 0 ≤ λ ≤ 1} es
vol(K) = hz, uivoln−1 (L).
2. El volumen de un conjunto cónico K = conv L ∪ {x} , esto es, la envoltura convexa de un
conjunto convexo L y un punto x 6∈ aff L es
vol(K) =
1 hx, uivoln−1 (L).
n
3. El volumen del sı́mplice Sn = conv{0, e1 , . . . , en } = conv {0, e1 , . . . , en−1 } ∪ {en } generado
por los vectores de la base canónica es
vol(Sn ) =
1
.
n!
4. En el caso general de un sı́mplice arbitrario S = conv{v0 , v1 , . . . , vn }, donde los vectores vj
son afı́nmente independientes, basta considerar la transformación afı́n T (x) = M x+v0 , siendo
M la matriz cuyas columnas son v1 − v0 , . . . , vn − v0 . Entonces,
det M .
vol(K) =
n!
5. Sean F1 , . . . , Fr las caras (n − 1)-dimensionales de un politopo P con normales exteriores
u1 , . . . , ur , respectivamente. Podemos suponer, sin pérdida de generalidad, que 0 ∈ int P , y
representamos por Ci = conv Fi ∪ {0} . Entonces,
r
vol(P ) =
1X
h(P, ui )voln−1 (Fi ).
n
i=1
Teorema 2.5 (Minkowski). Sean F1 , . . . , Fr las caras (n − 1)-dimensionales de un politopo
P , con normales exteriores u1 , . . . , ur , respectivamente. Entonces se tiene que
r
X
voln−1 (Fi )ui = 0.
i=1
6. El volumen de la bola unidad Bn es
vol(Bn ) = κn =
π n/2
.
Γ n2 + 1
(2)
2.2 El volumen y el área de superficie. Los volúmenes intrı́nsecos.
2.2.2.
23
El área de superficie.
Definición 2.6. El área de superficie de un cuerpo convexo K ∈ Kn , S(K), es el lı́mite de las áreas
de superficie de cualquier sucesión de politopos convexos que converjan a K. Si n = 2, S(K) = p(K)
se denomina el perı́metro de K.
Algunas propiedades del funcional área de superficie son las siguientes:
– S(K) permanece inalterada por movimientos de K.
– El área de superficie S(K) depende continuamente de K.
– Si K es (n−1)-dimensional, entonces S(K) es igual al doble de su volumen (n−1)-dimensional.
– S(K) = 0 si, y sólo si, K tiene dimensión menor o igual que n − 2.
– Si K ⊂ K 0 , entonces S(K) ≤ S(K 0 ), dándose la igualdad si, y sólo si, K ≡ K 0 ó S(K 0 ) = 0.
Teorema 2.7 (La fórmula de Cauchy, 1841). El área de superficie de K es la media de los
volúmenes (n − 1)-dimensionales de las proyecciones ortogonales de K sobre hiperplanos, esto es,
Z
1
S(K) =
voln−1 (K| u⊥ ) du.
(3)
κn−1 Sn−1
Teorema 2.8 (La fórmula de Minkowski, 1840–1901). El área de superficie de un conjunto
convexo K viene dada por
S(K) = lı́m
λ→0
vol(K + λBn ) − vol(K)
.
λ
(4)
El hecho de que el área de superficie pueda obtenerse de este modo fue demostrado por Steiner
en 1840, aunque fue Minkowski, en 1901, quien utilizó tal fórmula como definición.
2.2.3.
La fórmula de Steiner y los volúmenes intrı́nsecos.
L
a fórmula o polinomio de Steiner fue deducida originariamente por Steiner en 1840, en los casos
del plano euclı́deo y el espacio tridimensional R3 , para politopos y superficies de clase C 2 . En su
forma más general, ésta puede enunciarse del siguiente modo:
Teorema 2.9 (La Fórmula de Steiner, 1840). El volumen del conjunto paralelo exterior de
K a distancia λ, Kλ , se expresarsa como un polinomio de grado la dimensión del espacio, n,
en el parámetro λ, cuyos coeficientes son, salvo una constante, las llamadas quermassintegrales o
funcionales de Minkowski de K, Wi (K), para 0 ≤ i ≤ n:
vol(Kλ ) = vol(K + λBn ) =
n X
n
i=0
Esta expresión se conoce como el polinomio de Steiner.
i
Wi (K)λi .
(5)
24
¿Cómo medir un conjunto? La teorı́a de Brunn-Minkowski
4
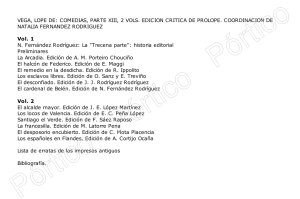
vol(K + λB3 ) = vol(K) + S(K)λ + M(K)λ2 + πλ3
3
vol(K) = volumen del conjunto original
S(K)λ = volumen de los prismas adosados a las caras
M(K)λ2 = volumen de los 3 cilindros adosados a los lados
4/3πλ3 = volumen de la bola de radio λ
Figura 2.1: El polinomio de Steiner en dimensión 3.
En 1975, McMullen introdujo los volúmenes intrı́nsecos de K:
Definición 2.10. Se denomina i-ésimo volumen intrı́nseco del conjunto K, y se representa por
Vi (K), 0 ≤ i ≤ n, a la quermassintegral normalizada de ı́ndice n − i, es decir,
n Wn−i (K)
Vi (K) =
.
i
κn−i
La fórmula de Steiner (5) en función de los volúmenes intrı́nsecos se expresarı́a de la forma
vol(K + λBn ) =
n
X
κn−i Vi (K)λn−i .
i=0
La acepción de volumen intrı́nseco tiene su justificación en el hecho de que cuando el conjunto
K tiene dimensión i ≤ n, entonces el i-ésimo volumen intrı́nseco de K coincide con su volumen
i-dimensional. En particular:
Vn (K) = W0 (K) = vol(K) es el volumen usual de K.
2Vn−1 (K) = nW1 (K) = S(K) es el área de su superficie de K.
2π
Vn−2 (K) = nW2 (K) = M(K) se conoce como la curvatura media integral de K.
n−1
2κn−1
2
V1 (K) =
Wn−1 (K) = b(K) coincide con la anchura media de K.
nκn
κn
1
V0 (K) =
Wn (K) = 1 es la caracterı́stica de Euler.
κn
En general, si K es de clase C 2 y su aplicación de Gauss es un difeomorfismo, representando
por Hj la j-ésima función simétrica elemental de las curvaturas principales normalizada,
X
n − 1 −1
H0 = 1
y
Hj =
ki1 . . . kij ,
j
1≤i1 <...<ij ≤n−1
entonces
Wi (K) =
1
n
Z
Hi−1 (x) dx;
bd K
es decir, los Wi (K) coinciden con las integrales de las curvaturas intermedias.
2.3 Los volúmenes mixtos.
25
Algunas propiedades de las quermassintegrales (volúmenes intrı́nsecos) son las siguientes:
– Si K tiene dimensión i, Vi (K) =
n Wn−i (K)
i
κn−i
es el volumen i-dimensional ordinario de K.
– Wi (K) es una función continua y positiva en K.
– Si K ⊂ K 0 , entonces Wi (K) ≤ Wi (K 0 ).
– Wi (K) es invariante bajo movimientos rı́gidos.
– Wi (K) es homogénea de grado n − i (Vi es homogénea de grado i) e independiente de la
dimensión del espacio en el cual esté contenido el conjunto K.
Estos funcionales juegan un papel fundamental en la Teorı́a de los Conjuntos Convexos. Sirva
de ejemplo un conocido resultado de Hadwiger (1957).
Definición 2.11. Una valuación sobre la familia Kn de todos los conjuntos convexos compactos de
Rn es una función ν : Kn −→ R tal que
i) ν(∅) = 0 y
ii) ν(K ∪ L) = ν(K) + ν(L) − ν(K ∩ L), siempre que K ∪ L ∈ Kn .
Teorema 2.12 (Teorema de Hadwiger, 1957). Toda valuación continua e invariante bajo movimientos rı́gidos ν es una combinación lineal con coeficientes constantes de las quermassintegrales
(o los volúmenes intrı́nsecos), es decir, existen números reales constantes c0 , . . . , cn tales que
ν(K) =
n
X
ci Wi (K).
i=0
2.3.
Los volúmenes mixtos.
Sumario. El volumen de una combinación lineal. Los volúmenes mixtos. Relación
con las quermassintegrales.
a fórmula de Steiner es un caso particular de una fórmula mucho más general que combina los
L
dos conceptos fundamentales de volumen y suma de Minkowski: con ella se obtiene el volumen de
una combinación lineal arbitraria de cuerpos convexos.
Teorema 2.13. Sean K1 , . . . , Km cuerpos convexos no vacı́os de Rn . Entonces, para números
reales cualesquiera λ1 , . . . , λm ≥ 0, el volumen de la combinación lineal λ1 K1 + · · · + λm Km es un
polinomio homogéneo de grado la dimensión n, en las variables λi ,
vol λ1 K1 + · · · + λm Km =
m
X
i1 =1
···
m
X
vol(Ki1 , . . . , Kin )λi1 . . . λin ,
in =1
cuyos coeficientes V(Ki1 , . . . , Kin ) se denominan los volúmenes mixtos de K1 , . . . , Km .
(6)
26
¿Cómo medir un conjunto? La teorı́a de Brunn-Minkowski
En el cálculo de esta expresión, los volúmenes mixtos se definen de la siguiente forma: si
K1 , . . . , Kn son cuerpos convexos no vacı́os de Rn , el volumen mixto de K1 , . . . , Kn es el valor
n
V(K1 , . . . , Kn ) =
1 X
(−1)n+k
n!
k=1
X
vol(Ki1 + · · · + Kik ).
(7)
i1 <...<ik
Proposición 2.14. Los volúmenes mixtos verifican las siguientes propiedades:
(i) Los volúmenes mixtos no varı́an bajo traslaciones arbitrarias de cualquiera de sus argumentos.
(ii) Si T (x) = M x + b es una transformación afı́n, entonces
V T (K1 ), . . . , T (Kn ) = det M V(K1 , . . . , Kn ).
(iii) Son lineales en cualquiera de sus variables: si λ, µ ≥ 0,
V(λK + µL, K2 , . . . , Kn ) = λV(K, K2 , . . . , Kn ) + µV(L, K2 , . . . , Kn ).
(iv) Dependen continuamente de sus argumentos.
(v) Dados dos cuerpos convexos K y L,
V(K, . . . , K, L) =
1
vol(K + λL) − vol(K)
lı́m
.
n λ→0
λ
(vi) V(K, . . . , K) = vol(K) es el volumen ordinario de K.
(vii) Son monótonos en cualquiera de sus variables y positivos: si K ⊂ L, entonces
0 ≤ V(K, K2 , . . . , Kn ) ≤ V(L, K2 , . . . , Kn ).
(viii) Son valuaciones: si K, L, K2 , . . . , Kn y K ∪ L son cuerpos convexos, entonces
V(K ∪ L, K2 , . . . , Kn ) = V(K, K2 , . . . , Kn ) + V(L, K2 , . . . , Kn ) − V(K ∩ L, K2 , . . . , Kn ).
Lema 2.15. Sean K un cuerpo convexo y P un politopo en Rn . Sea además uF el vector normal
exterior unitario de cada cara (n − 1)-dimensional F de P . Entonces,
X
1
V(K, P, . . . , P ) =
h(K, uF )voln−1 (F ).
(8)
n
F ∈Fn−1 (P )
Como consecuencia de este resultado, se deduce el siguiente corolario (que también se puede
obtener a partir de la propiedad (v) con la definición de Minkowski del área de superficie):
Corolario 2.16. Sea P un politopo en Rn . Entonces, S(P ) = nV(Bn , P, . . . , P ).
Lema 2.17. Sean K un cuerpo convexo y P2 , . . . , Pn politopos en Rn . Sea U ⊂ Sn−1 un conjunto
finito conteniendo todos los vectores normales exteriores unitarios de las caras de los politopos
λ2 P2 + · · · + λn Pn , con λ2 , . . . , λn ≥ 0. Vamos a representar por v(·, . . . , ·) el volumen mixto en
dimensión n − 1. Entonces,
1X
V(K, P2 , . . . , Pn ) =
h(K, u)v P2 ∩ H(P2 , u), . . . , Pn ∩ H(Pn , u) .
(9)
n
u∈U
2.4 La desigualdad de Brunn-Minkowski y otras desigualdades.
27
Como una generalización del lema anterior, dados ahora n − 1 cuerpos convexos K2 , . . . , Kn , el
teorema de representación de Riesz permite asegurar la existencia de una única medida de Borel
finita en la esfera Sn−1 , la llamada medida mixta de área de superficie S(K2 , . . . , Kn ; ·), tal que para
todo K ∈ Kn ,
Z
1
h(K, u) dS(K2 , . . . , Kn ; u).
(10)
V(K, K2 , . . . , Kn ) =
n Sn−1
Dado que las quermassintegrales son los coeficientes que aparecen en el polinomio que determina
el volumen de la suma K + λBn , se tiene claramente que
Wi (K) = V K, (n−i)
. . . , K, Bn , .(i)
. ., Bn .
En particular,
1
Wn−1 (K) = V(K, Bn , . . . , Bn ) =
n
2.4.
Z
1
h(K, u) dS(Bn , . . . , Bn ; u) =
n
Sn−1
Z
h(K, u) du =
Sn−1
κn
b(K).
2
La desigualdad de Brunn-Minkowski y otras desigualdades.
Sumario. La desigualdad de Brunn-Minkowski. La desigualdad de PrékopaLeindler. Versión multiplicativa de la desigualdad de Brunn-Minkowski. Primera
y segunda desigualdades de Minkowski. La desigualdad de Aleksandrov-Fenchel.
n esta sección vamos a estudiar principalmente dos desigualdades debidas a Brunn, Minkowski,
E
Aleksandrov y Fenchel, las cuales han constituido la pieza clave para el desarrollo de la llamada
Teorı́a de Brunn-Minkowski, núcleo fundamental de la Geometrı́a Convexa.
2.4.1.
La desigualdad de Brunn-Minkowski.
a desigualdad de Brunn-Minkowski es uno de los resultados fundamentales en la Teorı́a de los
L
Conjuntos Convexos. De esta desigualdad pueden extraerse además incontables resultados de gran
profundidad e importancia, por lo que ha sido durante muchos años, y aún sigue siendo, motivo de
estudio e investigación.
Teorema 2.18 (La desigualdad de Brunn-Minkowski, 1889–1910). Sean K y L dos conjuntos convexos y compactos de Rn no vacı́os, y sea 0 ≤ λ ≤ 1. Entonces
1/n
vol (1 − λ)K + λL
≥ (1 − λ)vol(K)1/n + λvol(L)1/n ,
(11)
dándose la igualdad si, y sólo si, K y L están en hiperplanos paralelos (si tienen dimensión menor
que n), o son homotéticos (si tienen dimensión n).
Teorema 2.19 (Desigualdad de Brunn-Minkowski, version multiplicativa). Si A y B son
conjuntos compactos de Rn y λ ∈ (0, 1), entonces
vol (1 − λ)A + λB ≥ vol(A)1−λ vol(B)λ .
(12)
28
¿Cómo medir un conjunto? La teorı́a de Brunn-Minkowski
La formulación dada por Minkowski del teorema, tal como hoy lo conocemos, no apareció hasta
1910. La desigualdad de Brunn-Minkowski fue demostrada primero por Brunn con un argumento
ingenioso e inteligente, aunque algo impreciso, donde además no se establecı́a el caso de la igualdad. Fue Minkowski quien proporcionó una demostración correcta y completa del resultado para
cualquier dimensión, caracterizando además la igualdad.
A la vista de un resultado tan “sencillo”, parece difı́cil intuir las potentes extensiones que se
pueden obtener de (11), algunas muy recientes, ası́ como su impacto en las Matemáticas y más
allá de ellas. A mitad del siglo XX, diversos matemáticos (Lusternik, Hadwiger...) extendieron este
resultado a contextos mucho más generales, incluyendo la clase de los conjuntos medibles Lebesgue,
comenzando entonces la desigualdad a moverse en los dominios del Análisis. Los últimos 30 años
han visto consolidar el papel de la desigualdad de Brunn-Minkowski como una potente herramienta
analı́tica, mostrando su estrecha relación con otras desigualdades del Cálculo. La versión integral
de la desigualdad de Brunn-Minkowski se conoce como la desigualdad de Prékopa-Leindler, inversa
de la conocida desigualdad de Hölder, donde ya la geometrı́a parece haber desaparecido.
Teorema 2.20 (Desigualdad de Prékopa-Leindler). Si λ ∈ (0, 1) y f, g, h : Rn −→ R son
funciones medibles no negativas tales que, para cualesquiera x, y ∈ Rn ,
h (1 − λ)x + λy ≥ f (x)1−λ g(y)λ
(13)
entonces
h≥
Rn
1−λ Z
Z
Z
f
Rn
λ
g
.
(14)
Rn
Otras desigualdades relacionadas con la (versión analı́tica) de Brunn-Minkowski en este contexto
general son, por ejemplo, las de Young, Brascamp-Lieb, Hölder, Sobolev, etc.
2.4.2.
Las desigualdades de Minkowski y la desigualdad de Aleksandrov-Fenchel.
Teorema 2.21 (Las desigualdades de Minkowski, 1903). Sean K, L ∈ Kn . Entonces,
V(K, . . . , K, L)n ≥ vol(K)n−1 vol(L)
(primera desigualdad de Minkowski),
(15)
dándose la igualdad si, y sólo si, K y L son homotéticos. Y aún más,
V(K, . . . , K, L)2 ≥ vol(K)V(K, . . . , K, L, L)
(segunda desigualdad de Minkowski).
(16)
Una poderosa desigualdad cuadrática, a partir de la cual se pueden obtener todas las desigualdades geométricas anteriores (y otras muchas), es la llamada desigualdad de Aleksandrov-Fenchel.
Ésta es la desigualdad más potente de este tipo que se conoce hasta el momento.
Teorema 2.22 (La desigualdad de Aleksandrov-Fenchel, 1936–37). Consideremos n cuerpos convexos K, L, K3 , . . . , Kn de Rn . Entonces
V(K, L, K3 , . . . , Kn )2 ≥ V(K, K, K3 , . . . , Kn )V(L, L, K3 , . . . , Kn ).
2.5 Otras medidas geométricas. Problemas de optimización.
29
Este resultado fue demostrado de forma independiente por Aleksandrov (para politopos, 1937)
y por Fenchel (para cuerpos con frontera suficientemente diferenciable, 1936). En ambos casos, la
desigualdad para cuerpos convexos generales se establecı́a por aproximación. Es por esta razón que
la condición de la igualdad se pierde. Claramente, la igualdad se va a alcanzar si los cuerpos K y
L son homotéticos, pero existen otros ejemplos de cuerpos para los cuales la igualdad también se
satisface; una caracterización precisa de la igualdad sigue siendo un problema abierto.
2.5.
Otras medidas geométricas. Problemas de optimización.
Sumario. El diámetro, la anchura, el circunradio y el inradio. Desigualdades.
n problema de optimización geométrica no es otra cosa que la búsqueda, entre una familia de
U
objetos determinada por ciertas caracterı́sticas geométricas comunes, de aquéllos que maximizan
o minimizan (optimizan) alguna magnitud concreta. En definitiva, un problema de este tipo se
traduce siempre en una desigualdad geométrica, llamada ası́ porque en ella interviene un determinado número de magnitudes geométricas. (recordemos las desigualdades de Brunn-Minkowski,
de Aleksandrov-Fenchel, de Minkowski o la conocida desigualdad isoperimétrica). Además, en la
mayorı́a de los casos, el interés fundamental radica en encontrar el conjunto o conjuntos para los
que se alcanza la igualdad, recibiendo éstos el nombre de conjuntos extremales.
Existen muy diversas magnitudes asociadas a los conjuntos, aunque las medidas más estudiadas
clásicamente son, además del volumen (área) y el área de superficie (perı́metro), el diámetro, la
anchura mı́nima, el inradio y el circunradio. Recordemos que
ω(K) = mı́n ω(K, u) : u ∈ Sn−1 , D(K) = máx ω(K, u) : u ∈ Sn−1 = máx |x − y| : x, y ∈ K .
Definición 2.23. Entre todas las bolas que contienen a un conjunto convexo K, existe una que
tiene radio mı́nimo denominada circumbola (circuncı́rculo en el caso plano) de K o bola circunscrita
a K, cuyo radio recibe el nombre de circunradio de K. Se representa por R(K).
La circumbola es única, ya que si K está contenido en la intersección de dos bolas con igual
radio R, entonces existe otra bola de radio menor que también contiene a K. Además, los puntos
comunes a la frontera de K y a su circumbola se distribuyen en la superficie de ésta de tal modo
que no están situados todos ellos en el mismo hemisferio, es decir, el centro de la bola circunscrita
(el circuncentro) pertenece a la envoltura convexa de dichos puntos. Y recı́procamente; una bola
que contenga al conjunto y que verifique la propiedad anterior es, necesariamente, su circumbola.
Definición 2.24. Entre todas las bolas contenidas en un conjunto convexo K, aquéllas que tienen
radio máximo se denominan imbolas (incı́rculos en el caso plano) de K o bolas inscritas en K. Tal
valor del radio recibe el nombre de inradio de K y se representa por r(K).
La imbola de un conjunto convexo no está, necesariamente, determinada de modo único, siendo
el conjunto de los centros de las imbolas de K (su núcleo) un conjunto convexo (n − 1)-dimensional.
30
¿Cómo medir un conjunto? La teorı́a de Brunn-Minkowski
Además los puntos comunes a la frontera de K y a su imbola se distribuyen en la superficie de ésta
de tal modo que no están situados en el mismo hemisferio, es decir, el centro de la bola inscrita (el
incentro) pertenece a la envoltura convexa de dichos puntos.
Si se consideran dos magnitudes de las anteriormente citadas, digamos X, Y , y se pretende
maximizar (minimizar) Y para cada valor fijo de X, el problema consiste en determinar una función
φ(X) tal que se verifique la desigualdad Y ≤ φ(X) (respectivamente, Y ≥ φ(X)), y de manera que
para cada valor de X positivo, exista un conjunto convexo para el que se alcance la igualdad.
Casos
(A, p)
(A, D)
(A, ω)
(A, R)
(A, r)
(p, D)
(p, ω)
(p, R)
(p, r)
(D, ω)
(D, R)
(D, r)
(ω, R)
(ω, r)
(R, r)
Desigualdades
4πA ≤ p2
4A ≤ √
πD2
2
ω ≤ 3A
A ≤ πR2
πr2 ≤ A
p ≤ πD
2D ≤ p
πω ≤ p
p ≤ 2πR
4R ≤ p
2πr ≤ p
ω≤D
D
√ ≤ 2R
3R ≤ D
2r ≤ D
ω ≤ 2R
ω ≤ 3r
2r ≤ ω
r≤R
Igualdad
Cı́rculo
Cı́rculo
Triángulo Equilátero
Cı́rculo
Cı́rculo
Conjuntos de Anchura Constante
Segmentos
Conjuntos de Anchura Constante
Cı́rculo
Segmentos
Cı́rculo
Conjuntos de Anchura Constante
Conjuntos Centralmente Simétricos
Conjuntos de Yamanouti
Cı́rculo
Cı́rculo
Triángulo Equilátero
Conjuntos Centralmente Simétricos
Cı́rculo
Cuadro 2.1: Desigualdades relacionando dos magnitudes geométricas en el plano euclı́deo.
El problema análogo para más de dos medidas serı́a el de encontrar los conjuntos convexos que
maximizan o minimizan una magnitud Z cuando se fijan otras dos medidas, digamos X e Y . Su
solución se expresarı́a por medio de desigualdades de la forma φ(X, Y ) ≤ Z ≤ ϕ(X, Y ).
2.6.
La simetrización de Steiner.
Sumario. La simetrización de Steiner. El teorema de esfericidad de Gross.
uchas desigualdades geométricas pueden establecerse modificando el cuerpo convexo de forma
M
que el nuevo conjunto tenga mayor simetrı́a, pero manteniendo ciertas propiedades. Un proceso
de este tipo se denomina simetrización. En 1838, Steiner introdujo la simetrización que lleva su
nombre con objeto de poder demostrar la desigualdad isoperimétrica.
2.6 La simetrización de Steiner.
31
Definición 2.25. Sean K un cuerpo convexo y H un hiperplano de Rn . Sea a ∈ Sn−1 su normal
exterior. Para cada recta x + ` = x + lin{a}, x ∈ K|H, (ortogonal a H, con (x + `) ∩ K 6= ∅),
tomamos el segmento de x + ` centrado en (x + `) ∩ H con longitud vol1 (x + `) ∩ K . La unión de
todos estos segmentos determina un nuevo conjunto, σH (K), denominado el simetrizado de Steiner
de K respecto al hiperplano H:
1
σH (K) = x + λa : x ∈ K|H, |λ| ≤ vol1 K ∩ (x + `)
2
Proposición 2.26. Sean K, K 0 , Ki ∈ Kn , i ∈ N, y sea H un hiperplano de Rn . La simetrización
de Steiner verifica las siguientes propiedades:
i) σH (K) ∈ Kn y es simétrico respecto a H.
ii) Si K ⊃ K 0 , entonces σH (K) ⊃ σH (K 0 ).
iii) Si 0 ∈ H, entonces σH (Bn ) = Bn .
iv) Si 0 ∈ H, entonces σH (λK) = λσH (K), con λ ≥ 0.
v) σH (K) ∩ σH (K 0 ) ⊃ σH (K ∩ K 0 ). El recı́proco no es cierto en general.
vi) σH conv(K ∪ K 0 ) ⊃ conv σH (K) ∪ σH (K 0 ) . El recı́proco no es cierto en general.
vii) σH (K + K 0 ) ⊃ σH (K) + σH (K 0 ). La igualdad se da si, y sólo si K y K 0 son homotéticos.
viii) Si lı́mi→∞ (Ki ) = K con int K 6= ∅, entonces lı́mi→∞ σH (Ki ) = σH (K). Es decir,
σH : {K ∈ Kn : dim K = n} −→ {K ∈ Kn : dim K = n}
es una aplicación continua. Si int K = ∅, entonces lı́mi σH (Ki ) ⊂ σH (K).
ix) Respecto a las magnitudes geométricas:
vol σH (K) = vol(K).
S σH (K) ≤ S(K).
En general, Wi σH (K) ≤ Wi (K), para 1 ≤ i ≤ n − 1.
D σH (K) ≤ D(K).
R σH (K) ≤ R(K).
r σH (K) ≥ r(K).
Respecto a la anchura mı́nima, en unos casos aumenta y en otros disminuye.
Teorema 2.27 (El teorema de esfericidad de Gross). Sea K ∈ Kn con dim K = n y sea SK el
conjunto de todos los cuerpos convexos obtenidos mediante una cantidad finita de simetrizaciones de
Steiner de K respecto a hiperplanos que contienen el origen. Entonces existe una sucesión Ki ∈ SK ,
i ∈ N, tal que
vol(K) 1/n
lı́m Ki =
Bn .
i→∞
vol(Bn )
32
¿Cómo medir un conjunto? La teorı́a de Brunn-Minkowski
Corolario 2.28. Sean K1 , K2 ∈ Kn con dim K1 , K2 = n. Entonces existen simetrizaciones de
Steiner σHi , i ∈ N, tales que
lı́m σHi . . . σH1 (K1 ) =
i→∞
lı́m σHi . . . σH1 (K2 ) =
i→∞
vol(K1 )
vol(Bn )
1/n
vol(K2 )
vol(Bn )
1/n
Bn
Bn .
Proposición 2.29. Sean K ∈ Kn con 0 ∈ int K y H un hiperplano conteniendo a 0. Entonces
vol σH (K)∗ ≥ vol(K ∗ ).
Teorema 2.30 (La desigualdad de Blaschke-Santaló). Sea K ∈ Kn con 0 ∈ int K. Entonces
vol(K)vol(K ∗ ) ≤ vol(Bn )2 .
2.7.
Las simetrizaciones central, de Schwarz y de Blaschke.
Sumario. La simetrización central. La desigualdad de Rogers-Shephard. La simetrización de Schwarz. La simetrización de Blaschke.
Definición 2.31. Se define el simetrizado central de un conjunto convexo K como
Kc =
1
K + (−K) .
2
En términos de la función soporte, se podrı́a definir el simetrizado central K c de K como el
conjunto convexo cuya función soporte viene dada por
i
1h
h(K, u) + h(K, −u) .
2
Proposición 2.32. Sea K ∈ Kn . La simetrización central verifica las siguientes propiedades:
i) K c es un cuerpo convexo simétrico respecto al origen.
ii) Conserva la anchura en cualquier dirección, esto es, ω(K c , u) = ω(K, u), para todo u ∈ Sn−1 .
En particular, se conservan el diámetro, la anchura mı́nima y la anchura media:
D(K c ) = D(K),
ω(K c ) = ω(K),
Wn−1 (K c ) = Wn−1 (K).
iii) R(K c ) ≤ R(K), r(K c ) ≥ r(K).
iv) El volumen no disminuye: vol(K c ) ≥ vol(K).
v) En general, Wi (K c ) ≥ Wi (K) para 0 ≤ i ≤ n − 2.
2.7 Las simetrizaciones central, de Schwarz y de Blaschke.
33
Teorema 2.33 (La desigualdad de Rogers-Shephard). Sea K ∈ Kn con dim K = n. Entonces
1
1 2n
vol(K).
vol(K) ≤ vol
(K − K) ≤ n
2
2
n
La cota inferior se alcanza si y sólo si K es centralmente simétrico; la desigualdad superior si y
sólo si K es un sı́mplice.
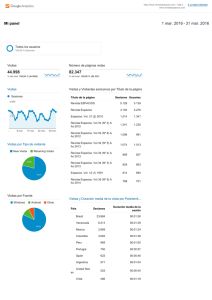
Definición 2.34. Sea K ∈ Kn con dim K = n, n ≥ 2, y, sin pérdida de generalidad, tomamos
` = (x1 , 0, . . . , 0) : x1 ∈ R .
Suponemos además que K se encuentra entre los hiperK(t)
K
planos paralelos
b
a
ℓ
{x ∈ Rn : x1 = a} y {x ∈ Rn : x1 = b}, con a < b.
t
Bn−1 (a)
Bn−1 (t)
a
Para cada t ∈ [a, b], sea K(t) = K ∩ {x ∈ Rn : x1 = t},
y sea Bn−1 (t) la bola (n − 1)-dimensional centrada en el
punto (t, 0, . . . , 0) con voln−1 Bn−1 (t) = voln−1 K(t) .
Se define el simetrizado de Schwartz de K como
[
Ks =
Bn−1 (t).
Bn−1 (b)
t
b
t∈[a,b]
Proposición 2.35. La simetrización de Schwarz de K ∈ Kn verifica las siguientes propiedades:
i) K s es un cuerpo convexo de revolución (con eje `).
ii) vol(K s ) = vol(K) y S(K s ) ≤ S(K).
Definición 2.36. Dados K ∈ Kn y H ⊂ Rn un hiperplano, sea KH la reflexión de K con respecto
a H. Se define el simetrizado de Blaschke de K como
1
K B = (K + KH ).
2
Proposición 2.37. La simetrización de Blaschke de K ∈ Kn verifica las siguientes propiedades:
i) K B es un cuerpo convexo simétrico respecto a H.
ii) D(K B ) ≥ D(K).
iii) Wn−1 (K B ) = Wn−1 (K).
iv) En general, Wi (K B ) ≥ Wi (K) para 0 ≤ i ≤ n − 2.
34
¿Cómo medir un conjunto? La teorı́a de Brunn-Minkowski