Mecánica Racional Tensor de Inercia y Elipsoide de Inercia
Anuncio

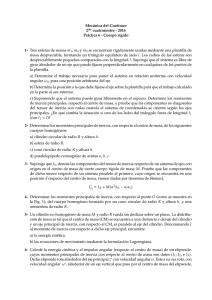
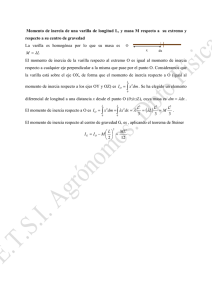
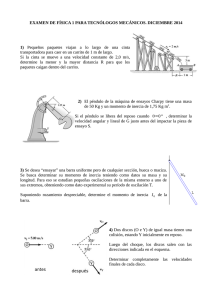
2012 Universidad Tecnológica Nacional Facultad Regional Bahía Blanca Mecánica Racional Tensor de Inercia y Elipsoide de Inercia Promoción Final Profesores: Dr. Ing. Liberto Ercoli Ing. Virginia Azurmendi Alumnos: Guillermo Gelso Eduardo Mir Bahia Blanca Octubre 2012 Tensor de Inercia y Elipsoide de Inercia Año 2012 Índice Descripción 1 - Herramienta de Cálculo para el Tensor y Elipsoide de Inercia 1.1 - Introducción 2 - Uso de la Herramienta de Cálculo 2.1 - Descripción del Problema Ejemplo 2.2 - Aplicación de la Herramienta Tensor de Inercia y Elipsoide de Inercia UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Página 2 2 2 2 3 Apéndice 1 Página 1 Tensor de Inercia y Elipsoide de Inercia Año 2012 1 - Herramienta de Cálculo para el Tensor y Elipsoide de Inercia 1.1 - Introducción El presente informe corresponde al examen promoción de los alumnos Guillermo Gelso y Eduardo Mir para la catedra Mecánica Racional de la carrera Ingeniería Mecánica dictada en la Universidad Tecnológica Nacional Facultad Regional Bahía Blanca por el Dr. Ing. Liberto Ercoli y la Ing. Virginia Azurmendi. La promoción consiste en realizar una herramienta informática (Software) que permita realizar el cálculo del Tensor de Inercia y el Elipsoide de Inercia de un cuerpo determinado en relación al punto que seleccionemos para el estudio. La herramienta permitirá el cálculo de cuerpos que poseen formas sencillas, cuyas expresiones del momento de inercia y producto de inercia en sus centroides son conocidos, seleccionando la geometría que se adapta al problema en desarrollo, nos encontraremos que mediante la carga y parámetros básicos como el radio, la altura y la masa podemos obtener el tensor de inercia y la ecuación del elipsoide la cual nos permitirá graficarla. La herramienta está desarrollada en el programa Visual Basic y posee vínculos a otras herramientas de cálculo y graficas como el Mathematica 7 de Wolfram y el Matemática para Microsoft. Mediante el vínculo con Matemática para Microsoft podremos obtener el gráfico del elipsoide con solo cargar los valores de la ecuación que es otorgada por nuestra herramienta. Como la herramienta nos permite realizar la traslación del tensor en el centroide a un punto deseado a través de las ecuaciones de Steiner, puede ocurrir que aparezcan productos de inercia en nuestro tensor, para lo cual mediante el uso del vinculo con el Mathematica 7 podremos diagonalizar el tensor y así obtener los momentos de inercia principales cuyos ejes coordenados en el punto coinciden con los ejes de simetría del elipsoide. Para el funcionamiento de la herramienta de cálculo del Tensor de Inercia y Elipsoide de Inercia se recomienda el uso de los siguientes softwares: Windows 7 – Microsoft. Visual Basic 6.0 – Microsoft. Mathematica 7 – Wolfram. Matemáticas – Microsoft. Cabe aclarar que los pasos iniciales para el estudio de un problema, determinar el marco de referencia y la posición del sistema coordenado, queda a criterio del usuario, es decir que antes de la utilización de la herramienta el usuario deberá hacer un planteo previo del sistema en estudio para determinar la ubicación mas favorable para el calculo. Veremos luego la solución de un problema tipo y paso a paso cómo se realizará el cálculo aplicando la herramienta. 2 - Uso de la Herramienta de Cálculo 2.1 - Descripción del Problema Ejemplo Calcularemos el tensor de inercia para el disco del siguiente mecanismo, Figura 1, el cual consta de una barra principal AB que presenta una rotación como la indicada en la figura y un soporte inclinado, vinculado a la barra AB, que sujeta el disco que estudiaremos. Como se ve en la imagen el disco se encuentra rotando en relación al eje EO1. Para calcular el Tensor y luego la Elipsoide partimos definiendo la terna de ejes coordenados X1-Y1-Z1 en el centroide del disco, que coincide con el punto O1. Para el cálculo en el punto mencionado utilizaremos los siguientes Datos: UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Página 2 Tensor de Inercia y Elipsoide de Inercia Año 2012 Radio del disco = 0.075 m Espesor del disco = 0.02 m. Peso del disco = 1 Kg Fig. 1 2.2 - Aplicación de la Herramienta A continuación vemos paso por paso como utilizar la herramienta en el problema anterior. 1) – Ejecutar el archivo de Visual Basic llamado “Tensor y Elipsoide de Inercia” que se encuentra en la carpeta del mismo nombre. UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Página 3 Tensor de Inercia y Elipsoide de Inercia Año 2012 2) – Dentro de la carpeta accionar el archivo ejecutable llamado “Tensor y Elipsoide de Inercia”. 3) – Al ejecutar el archivo nos envía a la pantalla principal de la herramienta donde podemos apreciar las diferentes formas geométricas con las cuales podemos iniciar el cálculo. Estas son: Disco Circular Delgado. Cilindro. Placa Rectangular Delgada. Esfera. Bloque Rectangular. Anillo Delgado. Cono. Semicilindro. UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Página 4 Tensor de Inercia y Elipsoide de Inercia Año 2012 4) – Para realizar el cálculo del problema ejemplo planteado seleccionaremos en la pantalla principal la opción de Cilindro, elegimos esta opción y no la de Disco Circular Delgado porque dentro de los datos a tener en consideración por el ejemplo es el espesor del disco, por este motivo usaremos el Cilindro para poder definir el espesor de dicho disco. 5) – Podemos apreciar a continuación la ventana correspondiente a la opción Cilindro. En la esquina superior izquierda de la pantalla se ubica la zona donde cargaremos los datos principales para realizar el cálculo, estos son Radio, Masa y Altura (para este caso el espesor del disco). DATOS UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Página 5 Tensor de Inercia y Elipsoide de Inercia Año 2012 6) – Con los datos cargados el paso siguiente es presionar el botón con la indicación “Calcular Cilindro”, esto dará como resultado los valores de los momentos de inercia que por el momento llamaremos I1 e I2. 7) – Los momentos de inercia I1 e I2 son los valores correspondientes al centroide de la pieza (G = O1). Necesitamos entonces definir los valores de Ixxg, Iyyg y Izzg que se obtienen de I1 e I2, para lo cual deberemos tener en cuenta la orientación de los ejes coordenados seleccionados para el estudio del disco, como se ve en la Fig. 1 el eje Z es perpendicular a las caras del disco, mientras que la circunferencia del mismo se describe en el plano X-Y. Para obtener dicha orientación en nuestro cálculo solo debemos presionar el botón que se llama “Izzg”. Observamos que los valores de Ixxg = I1, Iyyg = I1 y Izzg = I2. Si el sistema coordenado fuera diferente, por ejemplo el eje Y fuera el perpendicular a las caras del disco deberíamos presionar el botón “Iyyg”. 8) – Para formar el tensor de inercia del punto que estamos estudiando solo tenemos que presionar el botón llamado “Calcular Steiner”. Como apreciamos en la imagen en el lado derecho tenemos tres cuadros de textos que nos permitirán cargar diferentes distancias en las tres direcciones para poder trasladar por Steiner nuestros ejes coordenados a algún otro punto deseado. Por el momento solo calcularemos el tensor del centroide G, mas adelante volveremos a hacer referencia a estos datos y ejemplificar su utilización. UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Página 6 Tensor de Inercia y Elipsoide de Inercia Año 2012 DATOS PARA TRANSLADAR POR STEINER TENSOR DE INERCIA EN G 9) – Con el tensor ya podemos calcular las componentes a, b y c que definirán el Elipsoide de Inercia. Para obtener la ecuación del elipsoide presionamos el botón “Calcular” que se encuentra contiguo al tensor (imagen anterior). ELIPSOIDE DE INERCIA EN G UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Página 7 Tensor de Inercia y Elipsoide de Inercia Año 2012 10) – Para graficar la elipsoide haremos uso del programa Matemáticas para Microsoft el cual ejecutaremos desde el vinculo que posee esta herramienta. El archivo que abrimos mediante este vinculo ya posee definidos una serie de parámetros que reducen la tarea de graficar a solo introducir los valores de los parámetros a, b y c elevados al cuadrado obtenidos en el paso anterior. DOBLE CLIC 11) – Dentro del Matemáticas realizamos un doble Clic en la hoja de cálculo para poder modificar los datos en dicha hoja introduciendo los datos obtenidos en nuestra herramienta. UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Página 8 Tensor de Inercia y Elipsoide de Inercia Año 2012 DOBLE CLIC 12) – Para obtener finalmente el grafico del elipsoide de inercia debemos presionar el botón “Intro”. De este modo finalmente podemos observar la representación grafica del Tensor de Inercia a través del Elipsoide de Inercia. UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Página 9 Tensor de Inercia y Elipsoide de Inercia Plano X-Y UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Año 2012 Plano Z-Y Página 10 Tensor de Inercia y Elipsoide de Inercia Año 2012 Plano Z-X 13) – Ahora como adelantamos en el punto 8) veremos como trasladar por Steiner nuestro tensor a un punto determinado. Seleccionaremos como ejemplo el punto O2 en la Figura 1, el cual se encuentra a una distancia de 0.1 m (en dirección de las Z negativas) y una distancia aproximada de 0.07 m (en dirección de las Y negativas). Cargamos entonces los datos de las celdas correspondientes. 14) – Paso siguiente es presionar el botón “Calcular Steiner” para que vuelva a realizar el calculo del tensor de inercia con los valores del desplazamiento introducidos. Como vemos ahora encontramos que a parte de tener valores en los Momentos de Inercia tenemos valores en los Productos de Inercia. UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Página 11 Tensor de Inercia y Elipsoide de Inercia Año 2012 15) – Para poder graficar el elipsoide es este tensor primero debemos diagonalizar la matriz para poder hallar los momentos de inercias principales. Para esto haremos uso del vínculo que posee la herramienta con el programa Mathematica 7. En este calcularemos los autovalores de la matriz A. DOBLE CLIC 16) – El archivo que abrimos mediante este vinculo ya posee definidos una serie de parámetros que reducen la tarea a cargar los valores de la matriz A en el mismo y ejecutar las sentencias en el Mathematica. UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Página 12 Tensor de Inercia y Elipsoide de Inercia Año 2012 AUTOVALORES DE A 17) – Los valores obtenidos en el punto anterior luego debemos cargarlos en la matriz B que se encuentra en nuestra herramienta. Estos valores los cargamos a las celdas en diagonal de B que corresponden a los Momentos de Inercia Principales donde los ejes coordenados coinciden con los ejes de simetría de la Elipsoide. UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Página 13 Tensor de Inercia y Elipsoide de Inercia Año 2012 18) – Con los valores obtenidos y cargados en B presionamos el botón “Calcular” que se ve en la imagen, y así obtener los valores de los parámetros a, b y c correspondientes a los semiejes del elipsoide y la ecuación final del Elipsoide para el punto O2. ELIPSOIDE DE INERCIA EN O2 UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Página 14 Tensor de Inercia y Elipsoide de Inercia Año 2012 19) – Para graficar los valores de la elipsoide repetimos los pasos 10), 11) y 12). El gráfico de obtenemos de la ecuación se puede apreciar en las siguientes figuras. Plano X-Y UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Plano Y-Z Página 15 Tensor de Inercia y Elipsoide de Inercia Año 2012 Plano Z-X El procedimiento que acabamos de describir en este informe se aplicó en un ejemplo determinado, sin embargo se puede aplicar del mismo modo para otros problemas seleccionando la geometría adecuada y siguiendo los pasos descriptos. UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Página 16 2012 APENDICE I Tensor de Inercia y Elipsoide de Inercia Mecánica Racional Profesores: Dr. Ing. Liberto Ercoli Ing. Virginia Azurmendi Alumnos: Guillermo Gelso Eduardo Mir Tensor de Inercia y Elipsoide de Inercia Año 2012 1 - Tensor de Inercia 1.1 - Introducción El momento de inercia de la masa respecto de un eje se pude considerar en la dinámica del cuerpo rígido como una rotación simple alrededor de un eje fijo en el espacio inercial. Ahora, si el movimiento del cuerpo rígido es más complejo aparecerán otros momentos de inercia relacionados a la masa y tendrán gran relevancia en el comportamiento del cuerpo y los calculas a realizar. Estos momentos de inercia pertenecientes a las masas, se pueden llegar a compara con los términos de esfuerzo. La relación que existe entre los términos de inercia y los esfuerzos, cuyas componentes en dos dimensiones en un punto, se transforman del mismo modo que los segundos momentos y productos de inercia en una superficie plana, es decir, la similitud que existe entre las componentes del esfuerzo y los momento y productos de inercia en una superficie plana, es el modo en el que las componentes van cambiando en relación al sistema de referencia usado para medir las componentes, el cual gira alrededor del punto. Las componentes de esfuerzo en el plano bidimensional constituyen un caso particular del tensor de esfuerzo en un punto, del mismo modo lo hacen los momentos y productos de inercia en una superficie (describe de cierto modo la disposición de la superficie relativa a un sistema de referencia determinado) siendo estos casos particulares del tensor de inercia de masas (describe la distribución de la masa respecto a un sistema de referencia de tres coordenadas). 1.2 - Definición formal de las cantidades de inercia A continuación se definirán un conjunto de magnitudes que permitirán tener la noción de como es la distribución de masa de un cuerpo respecto de un sistema de referencia cartesiano. Para tal fin haremos referencia a la imagen Fig. 1.1 la cual muestra a un cuerpo rígido de masa M en un sistema de referencia cartesiano xyz. Fig. 1.1 Tanto el sistema de referencia como el cuerpo pueden tener cualquier movimiento relativo entre si, por lo cual se puede afirmar que las siguientes expresiones son validad para cualquier momento t. Si suponemos que el cuerpo esta compuesto de un continuo de partículas, cada partícula tendrá una masa dada por la expresión ρ dv, donde ρ es la densidad de masa y dv representa un elemento de volumen. Por lo tanto para el cuerpo de masa M las componentes de inercias referidas al sistema de referencia cartesiano en el instante t estará definido de la siguiente manera: UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Página 1 Tensor de Inercia y Elipsoide de Inercia Los términos correspondientes a Año 2012 , e son llamados momentos de inercia de la masa y pertenecen al cuerpo respecto de los ejes cartesianos xyz. Como se observa en cada caso el valor de los términos se obtiene realizando la integración del elemento de masa ρ dv (densidad de la masa por diferencial de volumen) es multiplicado por las distancias perpendiculares al cuadrado respecto del eje correspondiente. En cambio cada uno de los términos con subíndice mixto , e son denominados productos de inercia de la masa respecto a los ejes indicados por el subíndice. Sin embargo, se debe tener en cuanta que los productos de inercia sus subíndices se pueden invertir, obteniéndose así tres nuevas magnitudes que sumadas a las anteriores nos darán un sistema de nueve magnitudes, todas ellas respecto al mismo sistema de referencia. No obstante, las tres magnitudes adicionales obtenidas son iguales a las magnitudes que poseían los subíndices originales, de esta manera obtenemos que: El conjunto de las seis magnitudes de un cuerpo que son independientes dependerán de la inclinación y la posición que tenga el sistema de referencia. Además debemos tener en cuanta que el sistema de referencia se puede establecer en cualquier lugar del espacio y no es necesario que este dentro del cuerpo rígido. A continuación se probara que la suma de los momentos de inercia es independiente de la orientación de los ejes y depende solamente del punto de origen en un sistema de ejes ortogonales. Si realizamos la suma de los términos obtenemos: Combinado y operando obtenemos: La magnitud del vector posición respecto al origen hasta la partícula es independiente de la inclinación del sistema de referencia en el punto. Por lo tanto, la suma de los momentos de inercia en un punto del espacio para un cuerpo dado, es un invariante. La suma entonces puede considerarse que forma un campo escalar en el espacio y para cuerpos elásticos corresponderá el modulo del esfuerzo relacionado con un campo de esfuerzos o a un campo de presiones relacionado con ciertos fluidos. Algo a tener en cuenta de las ecuaciones anteriores es que los momentos de inercia siempre deben ser mayores que cero mientras que los productos de inercia pueden tomar cualquier valor. Un caso particular es cuando uno de los planos coordenados es un plano de simetría en la distribución de la masa, como el plano zy que se ve en la Fig. 1.2, el cual divide al cuerpo en dos partes iguales, ambas partes siendo la imagen de la otra y el plano zy comportándose como un espejo. Entonces teniendo en cuanto los parámetros anteriores para el calculo de la magnitud , obtenemos que cada mitad da una magnitud de igual valor pero de signos opuestos, de este modo también se puede afirmar lo mismo para . Se puede decir que . Mientas que el término tendrá un valor positivo. Debemos observar además que los productos de inercia que tienen como subíndice x son cero y la coordenada x es perpendicular al plano de simetría. UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Página 2 Tensor de Inercia y Elipsoide de Inercia Año 2012 Fig. 1.2 Podemos llegar a la conclusión que: si dos ejes forman un plano de simetría para la distribución de la masa de un cuerpo, los productos de inercia que tengan como uno de sus índices a la coordenada perpendicular al plano de simetría, serán cero. 1.3 - Relación entre los términos de inercia de las masas y los términos de inercia de áreas En base a lo expresado en el punto anterior se pueden determinar los segundos momentos y los productos de inercia de un área a partir del tensor de inercia. Consideremos una placa gruesa constante de espesor t y densidad uniforme ρ, como se indica en la Fig. 1.3. Si tomamos como referencia un sistema de modo tal que el plano xy coincida con una de las caras de la placa. Fig. 1.3 Recordemos que las expresiones de las componentes del tensor de inercia son: UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Página 3 Tensor de Inercia y Elipsoide de Inercia Año 2012 Si establecemos que t tiende a cero y que ρ incrementa sin limite, podemos decir que el valor limite del producto ρt dependerá de la rapidez con que t tienda a cero y con que ρ tienda a infinito. Así pues, conforme se tienda al límite el producto puede llegar a ser la unidad. El máximo valor que puede alcanzar z en las ecuaciones anteriores es t, por lo tanto cuando t 0, z también tendera a cero. Además el producto ρ dv los sustituimos por ρ t dA, y las expresiones tendiendo al límite quedaran: (a) (d) (b) (e) (c) (f) Como se ve la ecuación (c) no es independiente porque es la suma de las ecuaciones (a) y (b). La ecuación (c) es el momento de inercia polar de la superficie. Mientras que las ecuaciones (a), (b) y (d) que son los segundos momentos y el producto de inercia de la superficie de la cara de la placa. De este modo hemos obtenidos los momentos y productos de inercia de un área. 1.4 - Traslación de ejes coordenados A continuación se calculara los momentos de inercia y los productos de inercia de una masa con respecto a un sistema de referencia cartesiano xyz que se desplazo a través de una traslación referido a otro sistema de referencia llamado x’y’z’, que tiene su origen en el punto que corresponde al centro de masas del cuerpo y se supone además que los términos de inercia son conocidos. Calcularemos a modo de referencia teniendo en cuenta la Fig. 1.4. el momento de inercia Fig. 1.4 La formula de quedara de la siguiente forma: Si desarrollamos los binomios y redondeando se obtiene: UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Página 4 Tensor de Inercia y Elipsoide de Inercia Año 2012 Debemos tener en cuanta que las magnitudes que poseen el subíndice c son constantes en la integración y pueden sacarse fuera de la integral, nos daría como resultado: En algunos términos se sustituyo el término ρ dv por el dm y obtenemos mediante el valor de la integral: Siendo el valor de M la masa total del cuerpo. Como el origen del sistema coordenado x’y’z’ esta ubicado en el centro de masa los valores de las integrales siguientes serán iguales a cero. Además si al último término de la ecuación lo llamamos tendremos que: Obtendremos así la siguiente formula: Donde d es la distancia perpendicular entre los ejes z y z’. Podemos enunciar mediante esta última formula que: El momento de inercia de algún cuerpo con respecto a cualquier eje, es igual al momento de inercia del cuerpo con respecto a un eje paralelo que pase a través del centro de masa, mas la masa total multiplicada por el cuadrado de la distancia perpendicular entre los ejes. Realizando procedimientos similares llegamos a las siguientes ecuaciones que pertenecen al denominado Teorema de Steiner: Este teorema es de gran utilidad para el cálculo de formas simples y conocidas. UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Página 5 Tensor de Inercia y Elipsoide de Inercia Año 2012 1.5 - Propiedades de transformación de los términos de inercia Si tenemos los seis términos de inercia para un sistema de referencia determinado y deseamos obtener el momento de inercia de la masa con respecto a un eje que pasa a través del origen del sistema y tiene respecto a estos los cosenos directores l, m y n. Designamos al eje con las letras kk. Mediante la Fig. 1.5 podemos decir que: Donde φ es el ángulo que existe entre el eje kk y el vector r. Si colocamos en forma más útil el término , podemos considerar al triangulo rectángulo formado por el vector posición r el eje kk. Fig. 1.5 Fig. 1.6 Si observamos la Fig. 1.6 se ve amplificado el triangulo rectángulo de la Fig. 1.5, el lado a del triangulo tiene una magnitud que se puede determinar por el producto escalar del vector r y el versor en la dirección de kk. Entonces tendremos: Quedando como resultado: Utilizando Pitágoras podemos obtener el lado b: Si sabemos que , remplazamos y obtendremos: Sustituyendo este valor en la ecuación UTN – FRBB – Ingeniería Mecánica – Mecánica Racional y reacomodando: Página 6 Tensor de Inercia y Elipsoide de Inercia El término paréntesis quedándonos: Año 2012 se puede multiplicar a la primera expresión dentro de la integral que esta entre Multiplicando y agrupando términos, obtendremos la siguiente relación: Nuevamente teniendo en cuenta las definiciones vistas por las relaciones: Llegamos así a la ecuación de transformación que deseamos: (1) Ahora si calculamos el producto de inercia con respecto a dos ejes que se encuentran en forma perpendicular entre si, a los cuales llamaremos Ok y el otro eje Oq, como se ve en la Fig. 1.7. Fig. 1.7 Si llamamos los cosenos directores del eje Ok con las letras l, m y n, mientras que los cosenos directores de Oq los llamaremos l’, m’ y n’. Como los ejes están en ángulo recto uno respecto de otro sabemos que: UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Página 7 Tensor de Inercia y Elipsoide de Inercia Además las coordenadas del elemento de masa ρ dv a lo largo de los ejes son tendremos: Año 2012 y , por lo tanto Usando las componentes de r en las coordenadas xyz y los vectores unitarios, se obtiene: Realizando el producto escalar en los integrandos obtendremos: Así luego obtendremos: Sabemos además que la ecuación anterior , podemos sumar al integrando el termino . Luego cancelando algunos términos tenemos: Si agrupamos términos y sacamos los cosenos directores fuera de la integral obtendremos: Recordando las definiciones anteriores para los momentos y productos de inercia, obtendremos la transformación que buscamos: (2) Usando las ecuaciones (1) y (2) podemos hallar tanto los productos de inercia como los momentos de inercia en referencia a un nuevo sistema de referencia llamado x’y’z’, que se encuentra girado en relación a un sistema de referencia xyz. Luego de obtener los valores de estas magnitudes para un sistema de referencia con origen en un punto, se pueden obtener los valores en ese punto para cualquier otro sistema de referencia a través de las ecuaciones de transformación. Podemos decir que: UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Página 8 Tensor de Inercia y Elipsoide de Inercia Podemos decir que , , , Año 2012 , , son las componentes del tensor de inercias. Ahora podemos definir un tensor de segundo orden simétrico como un conjunto de componentes que bajo los efectos de una rotación de ejes se transforman mediante las siguientes ecuaciones: Para los términos diagonales: Para los términos fuera de la diagonal: Donde l, m y n son los cosenos directores en la dirección de k y l’, m’ y n’ son los cosenos directores en la dirección j. 1.6 - Notación tensorial para las transformaciones A continuación usaremos una notación que es casi universalmente la más usada en esta clase de estudios, las cuales definen las relaciones de transformación en un punto, caracterizando las cantidades tensoriales. De este modo remplazaremos las letras l, m y n, que las usábamos para representar los cosenos directores en una línea de dirección k que pasa a través del origen del sistema de referencia utilizado xyz, se remplazaran por la letra a con dos subíndices. El primer subíndice identifica a la línea (para este caso la línea es k) y el segundo subíndice identificara el eje de referencia. Por lo tanto para la línea k tendremos lo siguiente: Teniendo en cuenta la ecuación (1) y remplazando en ella tendremos la siguiente ecuación: Así, esta misma ecuación la podemos rescribir de una forma más simple: (3) Donde i y j se suman sobre xyz respectivamente y cuando i es distinto de j se le debe poner a un signo menos (-). Si el eje k corresponde al eje x’ en un sistema de referencia nuevo, podemos sustituir el subíndice k por el subíndice x’. Así pues, un coseno director indicado como es entonces el coseno director entre el eje x’ y el eje x. De la misma forma se puede sustituir para un eje y’, el subíndice k pasa a ser el subíndice y’, etc. Conociendo los cosenos directores podremos calcular los diferentes momentos de inercia respecto a nuestros nuevos ejes de referencia, empleando la ecuación (3) obtendremos las siguientes formas: UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Página 9 Tensor de Inercia y Elipsoide de Inercia Año 2012 (4) En forma similar, la ecuación (2) puede darse primero como: Usando el símbolo de suma anteriormente mencionado esta ecuación se puede escribir: Si k y q son los ejes x’ e y’, solamente necesitamos sustituir sus valores. Así en un sistema de referencia llamado x’y’z’, en el punto de consideración los productos de inercia serán: (5) Como podemos ver las ecuaciones (4) y (5) nos dan los momentos y productos de inercia para un nuevo sistema de referencia x’y’z’, en relación a los momentos y productos de inercia para un sistema de referencia xyz y además de los cosenos directores entre los ejes de los sistemas. Se puede hacer una simplificación y usar una notación que representa las ecuaciones (4) y (5). Si dejamos que los valores k y q remplacen todas las combinaciones de x’y’z’, recordando usar el signo menos para los términos con índice mixto podemos expresar las seis ecuaciones como: UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Página 10 Tensor de Inercia y Elipsoide de Inercia Año 2012 2 - Elipsoide de Inercia 2.1 - El elipsoide de inercia y los momentos de inercia principales Como hemos visto la ecuación (1) nos da el momento de inercia de un cuerpo en relación a un eje k, los cosenos directores entre el eje y los de un sistema de referencia ortogonal con el origen en un punto O sobre el eje y además en referencia a los seis términos de inercia para el sistema de referencia. Si deseamos explorar la naturaleza de la variación de en un punto O del espacio, a medida que la dirección del eje k va variando (Fig. 1.8), utilizaremos una representación geométrica de inercia en un punto mediante el siguiente criterio. A lo largo del eje k se señala como una distancia, cuya cantidad OA esta dada por la siguiente relación: Siendo para el caso la letra d cualquier constante arbitraria con dimensiones de longitud que logre hacer al termino OA adimensional. El término es denominado el radio de giro para una superficie. Fig. 1.8 Utilizando un nuevo diagrama, al cual llamaremos Fig. 1.9, encontraremos los nuevos ejes ξ, η, ζ que son paralelos a los ejes x, y, z del diagrama físico. Si consideramos todas las direcciones que son posibles de k, se generara una superficie alrededor del punto O’, esta superficie esta relacionada con la forma que posee el cuerpo, y se relacionan a través de la ecuación (1). Fig. 1.9 UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Página 11 Tensor de Inercia y Elipsoide de Inercia Año 2012 La ecuación de la superficie se puede expresar del siguiente modo, supongamos que a ξ, η, ζ son las coordenadas del punto A y como el segmento O’A es paralelo a la línea k, podemos afirmar que tiene los cosenos directores l, m y n que se asocian con esta línea por lo cual podemos escribir las siguientes ecuaciones: Sustituyendo los cosenos directores en la ecuación (1) y con las relaciones anteriores obtenemos: Como podemos apreciar en la ecuación los términos se pueden cancelar y la ecuación nos quedara en función de los términos ξ, η, ζ que corresponden a las coordenadas de la superficie y en función de los términos de inercia del cuerpo, así tendremos: Por geometría analítica podemos ver que la ecuación anterior es similar a la ecuación de un elipsoide y que denominaremos como elipsoide de inercia. Podemos concluir por lo tanto, que el tensor de inercia en un punto cualquiera del cuerpo, puede ser representado geométricamente por una superficie de segundo orden. El tamaño, la forma y la inclinación del elipsoide, varia en cada punto del espacio para un cuerpo dado. El elipsoide posee tres ejes ortogonales de simetría con un punto común en el centro llamado O’, como se ve en la Fig. 1.9, los ejes mencionados corresponden a los segmentos O’1, O’2 y O’3. La forma y la inclinación del elipsoide, como se menciono, depende de la distribución de masas del cuerpo respecto al origen del sistema de referencia xyz y no tiene relación con la selección de la orientación del sistema de referencia en el punto y por lo tanto ocurre lo mismo para el sistema ξ, η, ζ. Existe la posibilidad de hacer que el sistema de referencia xyz (y por lo tanto ξ, η, ζ también) se puede ubicar de tal manera que este coincida con los ejes de simetría O’1, O’2 y O’3. Si cambiamos las nomenclaturas de estos sistemas de referencias de la siguiente manera x’y’z’ y ξ’ η’ ζ’, la ultima ecuación se transforma en: (6) Donde ξ’ η’ ζ’ son las coordenadas de la superficie del elipsoide relativas al sistema de referencia nuevo y los términos , , son los momentos de inercia de la masa respecto del sistema nuevo. De la confección del espacio geométrico y de las ecuaciones que se relacionan a este, podemos sacar las siguientes conclusiones: UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Página 12 Tensor de Inercia y Elipsoide de Inercia Año 2012 Uno de los ejes de simetría del elipsoide es el de mayor distancia desde el origen hasta la superficie del elipsoide, mientras que el otro eje es el de menor distancia desde el origen hasta la superficie del elipsoide. Si recordamos la ecuación debemos concluir que el momento de inercia mínimo para el punto O corresponde al eje que tiene longitud máxima y que el momento de inercia máximo corresponde al eje que posee la longitud mínima. Mientras que el tercer eje tiene un valor intermedio que hace que la suma de estos términos del momento de inercia sea igual a la suma de los términos del momento de inercia para todos los sistemas de ejes ortogonales en el punto O. Mediante la ecuación (6) podemos concluir que , los productos de inercia respecto a estos ejes son iguales a cero. Por las conclusiones anteriores, podemos afirmar que estos ejes son los ejes principales de inercia en el punto O. Como hemos mencionado anteriormente las operaciones pueden efectuarse en cualquier punto del espacio para un determinado cuerpo, por lo cual podemos concluir que: para cada punto hay un conjunto de ejes principales, cuyos momentos de inercia en ese punto tienen los valores extremos y cuyos productos de inercia tienen valor cero. La orientación de estos ejes, para un cuerpo dado, variara continuamente de un punto a otro a través del espacio. Los tensores de segundo orden son cantidades que tienen propiedades que permiten transformarlo de un sistema de referencia original a un sistema de referencia de ejes principales, de este modo el tensor de inercia pasara de: a De esta forma logramos “diagonalizar” el tensor. Como se menciono, los ejes principales de un punto, corresponden a los ejes en los cuales los productos de inercia son cero. Por lo tanto, si se tienen dos planos de simetría ortogonales en el punto, podemos concluir, que los productos de inercia deben ser cero para un conjunto de ejes que consistan de la línea de intersección de los dos planos y de un par de líneas que estén en los planos de simetría y dirigidas de forma perpendicular a la línea de intersección en el punto que se estudia. Como vemos estos ejes son los principales para el punto en cuestión. 2.2 - Cálculo de los momentos de inercia principales Veremos ahora en este apartado como calcular los momentos de inercia principales y las direcciones de los ejes principales para el caso en el cual no contamos con planos de simetría. El procedimiento para el cálculo es hacer varias los cosenos directores l, m y n del eje k, de tal manera que dado por la ecuación (1) sea un extremal: Luego se iguala a cero la diferencial de , se agrupan términos y cancelando el valor 2, se obtiene: (7) Si las diferenciales fueran independientes, se pueden igualar a cero sus coeficientes para satisfacer la ecuación, pero estos no son independientes debido a que la ecuación debe cumplirse todo el tiempo. Por lo tanto las diferenciales de la ecuación deben relacionarse del siguiente modo: UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Página 13 Tensor de Inercia y Elipsoide de Inercia Año 2012 (8) Puede considerarse dos de las diferenciales como independientes y la tercera establecerla con la ecuación anterior. Para facilitar la operación extremal, se introduce un valor denominado multiplicador de Lagrange λ. Si multiplicamos la ecuación (8) por λ y restándolo de la ecuación (7) se obtiene luego de agrupar términos: Ahora podemos considerar que m y n son variables independientes y que el valor de λ puede escogerse de modo que el coeficiente de dl sea cero, esto es: (9) Teniendo en cuanta el termino anterior y de este modo como dm y dn son independientes, se pueden igualar a cero sus coeficientes para satisfacer la ecuación. Se obtiene entonces: (10) Una condición necesaria para la solución del conjunto de cosenos directores l, m y n, a partir de las , es que el determinante de ecuaciones (9) y (10), y además que satisfagan la ecuación estas variables sea cero: (11) El resultado es una ecuación cubica para la que puede probarse que hay tres raíces reales para λ, sustituyendo estas raíces en (9) y (10) se pueden determinar los tres cosenos directores para cada raíz. Estos serán los cosenos directores de los ejes principales respecto de un sistema de referencia xyz. Una . vez determinados los cosenos se pueden remplazar los valores en la ecuación (1) y obtener el valor de Sin embargo, se puede demostrar que los tres multiplicadores de Lagrange son los momentos de inercia principales. Como hemos visto la ecuación (11) se consigue llegar a ella mediante las propiedades de transformación de los términos de inercia y por lo tanto puede ser usada para obtener los valores principales de cualquier tensor de segundo orden, así, para el tensor de inercia las raíces λ de la ecuación nos darán los momentos de inercia principales. UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Página 14 Tensor de Inercia y Elipsoide de Inercia Año 2012 3 - Resumen Si las cantidades se transforman (cambian su valor cuando el sistema cambia) en la misma forma, se pueden hallar cierta semejanzas que son de gran utilidad y poseen significado físico. Como hemos visto durante este trabajo, se han determinado los términos de inercia (momentos y productos de inercia) y se comprobó que se transforman al girar el sistema de referencia. Estas formulas de transformación constituyen la razón por la cual podemos llamar tensor a un conjunto de cantidades. Algunas de las propiedades útiles de las cantidades tensoriales son: La suma de los términos diagonales del tensor, se llama traza en un punto, y es constante para todas las orientaciones del sistema de referencia. Esto genera que las cantidades puedan tomar un significado físico tales como presión en dinámica de los fluidos y modulo de esfuerzo en elasticidad. Del mismo modo que un vector puede representarse gráficamente en un punto por medio de un segmento lineal con una dirección determinada, un tensor de segundo orden puede representarse en un punto a través de una superficie de segundo orden, esta es un elipsoide. Existen tres direcciones ortogonales entre si en un punto, en los cuales los términos que no se encuentran en la diagonal del tensor (productos de inercia) son cero y los términos en la diagonal a lo largo de dos direcciones tienen su valor extremo. Estos son los denominados ejes principales en el punto. 4 - Bibliografía Ingeniería Mecánica Dinámica de Irving H. Shames. Mecánica para Ingenieros Dinámica de J.L. Meriam – L.G. Kraige. Mecánica para Ingenieros Dinámica de A. Bedford – W. Fowler. Mecánica Vectorial de Beer – Johnstone. Apuntes de la Cátedra Mecánica Racional de Dr. L. Ercoli – Ing. V. Azurmendi. UTN – FRBB – Ingeniería Mecánica – Mecánica Racional Página 15