Anybus-CC
Anuncio

Motores | Automatización | Energía | Transmisión & Distribución | Pinturas Anybus-CC SSW7000 Manual del Usuario Manual del Usuario Anybus-CC Serie: SSW7000 Idioma: Español N º del Documento: 10001038468 / 01 Fecha de la Publicación: 01/2011 Prefacio Estimado Cliente, El Arrancador Suave SSW7000 es un producto desarrollado con alto nivel de calidad y de eficiencia, lo que garantiza al equipo una excelente performance. Este producto precisa ser identificado y tratado adecuadamente, pues sus características requieren determinados cuidados especiales, dentro los cuales los de almacenado, de instalación y de mantenimiento. Caso las dudas persistan, por gentileza contactar con WEG. Mantenga este manual siempre próximo del SSW, para que pueda ser consultado cuando necesario. ¡ATENCIÓN! 1. Es imprescindible seguir los procedimientos contenidos en este manual para que la garantía tenga vigencia y pueda ser aplicada. 2. 2. Los procedimientos de instalación, operación y mantenimiento del SSW deberán ser hechos por personal calificado. ¡NOTAS! 1. La reproducción de las informaciones contenidas en este manual, en el todo o en partes, es permitida solamente cuando la fuente sea mencionada. 2. Caso este manual sea extraviado, el archivo electrónico en formato “.pdf” se encuentra disponible en el la pagina web www.weg.net o podrá ser solicitada otra copia impresa. WEG EQUIPAMENTOS ELÉTRICOS S.A SSW7000 | 3 Índice de las Revisiones Revisión Descripción Capítulo 01 Primera Edición - SSW7000 | 4 Contenido CONTENIDO 1 INTRODUCCIÓN AL BUS DE CAMPO (FIELDBUS) ..............................................8 2 KITS ACCESORIOS (MÓDULOS ACTIVOS) .........................................................9 2.1 DEVICEN ET ................................................................................................................................. 9 2.1.1 KIT DEVICENET-05.....................................................................................................................9 2.1.2 TERMINALES DEL CONECTOR ..........................................................................................................9 2.1.3 SEÑALIZACIONES ..........................................................................................................................9 2.1.4 CONEXIÓN CON LA RED .................................................................................................................9 2.1.5 CONFIGURACIÓN DEL MÓDULO .....................................................................................................10 2.1.6 ACCESO A LOS PARÁMETROS .......................................................................................................10 PROFIBUS DP-V1 .......................................................................................................................11 2.2.1 KIT PROFIBUS-05 ....................................................................................................................11 2.2.2 TERMINALES DEL CONECTOR ........................................................................................................11 2.2.3 SEÑALIZACIONES ........................................................................................................................11 2.2.4 CONEXIÓN CON LA RED ...............................................................................................................11 2.2.5 CONFIGURACIÓN DEL MÓDULO .....................................................................................................12 2.2.6 ACCESO A LOS PARÁMETROS .......................................................................................................12 ETHERNET/IP.............................................................................................................................12 2.3.1 KIT ETHERNETIP-05.................................................................................................................12 2.3.2 CONECTOR ................................................................................................................................13 2.3.3 SEÑALIZACIONES ........................................................................................................................13 2.3.4 CONEXIÓN CON LA RED ...............................................................................................................13 2.3.5 CONFIGURACIÓN DEL MÓDULO .....................................................................................................13 2.3.6 TASA DE COMUNICACIÓN .............................................................................................................14 2.3.7 ACCESO A LOS PARÁMETROS VÍA WEB .........................................................................................16 2.2 2.3 3 KITS ACCESORIOS (MÓDULOS PASIVOS) .......................................................18 3.1 3.2 3.3 RS232 .....................................................................................................................................18 KIT RS232-05 ...........................................................................................................................18 TERMINALES DEL CONECTOR ....................................................................................................18 3.3.1 SEÑALIZACIONES ........................................................................................................................18 3.3.2 CONEXIÓN CON LA RED ...............................................................................................................19 RS485/422 ..............................................................................................................................19 3.4.1 KIT RS485-05 ...........................................................................................................................19 3.4.2 TERMINALES DEL CONECTOR ........................................................................................................19 3.4.3 SEÑALIZACIONES ........................................................................................................................19 3.4.4 CONEXIÓN CON LA RED ...............................................................................................................19 3.4 4 PARAMETRIZACIÓN DEL SSW ........................................................................21 4.1 SÍMBOLOS PARA DESCRIPCIÓN DE LAS PROPIEDADES .........................................................................21 P0220 – SELECCIÓN FONTE MODO LOCAL/REMOTO ...................................................................................21 P0229 – SELECCIÓN DE LA FUENTE DEL COMANDOS EM MODO LOCAL ............................................................21 P0230 – SELECCIÓN DE LA FUENTE DEL COMANDOS EM MODO REMOTO ..........................................................21 P0313 – ACCIÓN DE LOS ERRORES DE COMUNICACIÓN SERIE .......................................................................21 P0680 – PALABRA DE ESTADO DEL SSW ....................................................................................................22 P0686 – PALABRA DE CONTROL ANYBUS-CC............................................................................................23 P0692 – PALABRA DE ESTADO DEL MODO DE CONFIGURACIÓN .......................................................................24 P0693 – PALABRA DE CONTROL DEL MODO DE CONFIGURACIÓN .....................................................................25 P0695 – VALOR PARA LAS SALIDAS DIGITALES ..........................................................................................26 P0696 – VALOR 1 PARA SALIDAS ANALÓGICAS ..........................................................................................26 P0697 – VALOR 2 PARA SALIDAS ANALÓGICAS ..........................................................................................26 P0723 – IDENTIFICACIÓN DE LA ANYBUS ...................................................................................................27 SSW7000 | 5 Contenido P0724 – ESTADO DE LA COMUNICACIÓN ANYBUS .......................................................................................28 P0725 – DIRECCIÓN DE LA ANYBUS .........................................................................................................28 P0726 – TASA DE COMUNICACIÓN DE LA ANYBUS ......................................................................................28 4.2 CANTIDAD DE PALABRAS DE COMUNICACIÓN .....................................................................................29 P0728 – LECTURA #2 ANYBUS ...............................................................................................................30 P0729 – LECTURA #3 ANYBUS ...............................................................................................................30 P0730 – LECTURA #4 ANYBUS ...............................................................................................................30 P0731 – LECTURA #5 ANYBUS ...............................................................................................................30 P0732 – LECTURA #6 ANYBUS ...............................................................................................................30 P0733 – LECTURA #7 ANYBUS ...............................................................................................................30 P0734 – LECTURA #8 ANYBUS ...............................................................................................................30 P0735 – LECTURA #9 ANYBUS ...............................................................................................................30 P0736 – LECTURA #10 ANYBUS .............................................................................................................30 P0737 – LECTURA #11 ANYBUS .............................................................................................................30 P0738 – LECTURA #12 ANYBUS .............................................................................................................30 P0739 – LECTURA #13 ANYBUS .............................................................................................................30 P0740 – LECTURA #14 ANYBUS .............................................................................................................30 P0741 – LECTURA #15 ANYBUS .............................................................................................................30 P0742 – LECTURA #16 ANYBUS .............................................................................................................30 P0743 – LECTURA #17 ANYBUS .............................................................................................................30 P0744 – LECTURA #18 ANYBUS .............................................................................................................30 P0745 – LECTURA #19 ANYBUS .............................................................................................................30 P0746 – LECTURA #20 ANYBUS .............................................................................................................30 P0747 – LECTURA #21 ANYBUS .............................................................................................................30 P0748 – LECTURA #22 ANYBUS .............................................................................................................30 P0749 – LECTURA #23 ANYBUS .............................................................................................................30 P0750 – LECTURA #24 ANYBUS .............................................................................................................30 P0751 – ESCRITA #2 ANYBUS ................................................................................................................31 P0752 – ESCRITA #3 ANYBUS ................................................................................................................31 P0753 – ESCRITA #4 ANYBUS ................................................................................................................31 P0754 – ESCRITA #5 ANYBUS ................................................................................................................31 P0755 – ESCRITA #6 ANYBUS ................................................................................................................31 5 PROTOCOLO DEVICENET ...............................................................................32 5.1 5.2 5.3 5.4 5.5 5.6 5.7 5.8 5.9 5.10 INTRODUCCIÓN ...........................................................................................................................32 CAMADA FÍSICA ..........................................................................................................................32 CAMADA DE ENLACE DE DATOS .....................................................................................................33 CAMADA DE T RANSPORTE Y RED ....................................................................................................33 CAMADA DE A PLICACIÓN – PROTOCOLO CIP ....................................................................................34 ARCHIVO DE C ONFIGURACIÓN ........................................................................................................34 MODOS DE COMUNICACIÓN...........................................................................................................35 CONJUNTO DE CONEXIONES PREDEFINIDAS MAESTRO/ESCLAVO ..........................................................36 ESTADOS DEL MÓDULO DEVICEN ET ................................................................................................36 ESTADOS DE LA RED DEVICENET ................................................................................................36 6 PROTOCOLO PROFIBUS DP-V1 ......................................................................37 6.1 6.2 6.3 6.4 6.5 6.6 6.7 6.8 INTRODUCCIÓN ...........................................................................................................................37 CARACTERÍSTICAS BÁSICAS ..........................................................................................................37 ARQUITECTURA DEL PROTOCOLO ...................................................................................................37 MEDIO DE TRANSMISIÓN ..............................................................................................................38 TASAS DE TRANSMISIÓN Y CONECTORES .........................................................................................39 ARCHIVO DE C ONFIGURACIÓN ........................................................................................................40 ESTADOS DEL MÓDULO DE COMUNICACIÓN ......................................................................................40 ESTADOS DEL MODO DE OPERACIÓN ..............................................................................................40 7 PROTOCOLO ETHERNET/IP ............................................................................41 7.1 INTRODUCCIÓN ...........................................................................................................................41 SSW7000 | 6 7.2 7.3 7.4 7.5 7.6 7.7 7.8 Contenido CAMADA FÍSICA ..........................................................................................................................41 CAMADA DE ENLACE DE DATOS .....................................................................................................42 CAMADA DE R ED Y TRANSPORTE ....................................................................................................42 ARCHIVO DE C ONFIGURACIÓN ........................................................................................................43 ESTADOS DEL MÓDULO ETHERNET/IP.............................................................................................43 ESTADOS DE LA RED ETHERNET/IP ................................................................................................43 ESTADO DEL LINK/CONEXIÓN ........................................................................................................43 8 FALLAS Y ALARMAS RELACIONADOS CON LA COMUNICACIÓN ANYBUS-CC 44 A129/F229 – MÓDULO ANYBUS-CC OFFLINE ...........................................................................................44 A130/F230 – ERROR DE ACCESO AL MÓDULO ANYBUS-CC ........................................................................44 SSW7000 | 7 Introducción al Bus de Campo (Fieldbus) 1 INTRODUCCIÓN AL BUS DE CAMPO (FIELDBUS) El bus de campo (más conocido por fieldbus) es un sistema de comunicación digital utilizado en la industria para interconectar elementos primarios de automatización, tales como PLCs, drives, válvulas, sensores, actuadores, etc., conforme presentado en la Figura 1.1 abajo. Figura 1.1: Ilustración de una red de campo. El concepto que nació en el fin de la década de 80, surgió como una alternativa a los limitados sistemas analógicos (4-20mA e +/-10V). En este tipo de control comúnmente se instalaban una gran cantidad de cables de gran longitud entre los dispositivos hasta el controlador central. Eso proporcionaba altos costes con cableado y dificultad en el mantenimiento, lo que comprometía la ampliación del sistema. Las primeras redes industriales digitales que surgieran utilizaban soluciones propietarias creadas por grandes fabricantes. No había la preocupación con la interoperabilidad o estandarización. Las opciones del cliente con relación a los suministradores eran restrictas. Más la creciente demanda por mejorías en los procesos ha hecho con que la situación se invirtiera. Diversas tecnologías surgieran. La estandarización se ha tornado importante debido a los altos costes involucrados. Fueran creadas organizaciones responsables por la promoción y mantenimiento de las redes y protocolos, muchos de estos abiertos. Surgieran también grupos de usuarios con el objetivo de si ayudaren mutuamente. Hoy, existe una gran variedad de protocolos en el mercado, cada cual con sus ventajas y desventajas. Cabe a usuario / proyectista avaliar cuales son los requisitos necesarios para su aplicación y elegir las opciones disponibles. Independiente de la elección, las principales ventajas de las redes industriales son: Reducción significativa de cables y costes de instalación. Reducción del tiempo de puesta en marcha. Mayor confiabilidad y eficiencia. Adicción, remoción y substitución de equipos en condición de carga (equipo energizado). Integración de varios suministradores (estandarización). Monitoreo efectivo del proceso. Configuración de los dispositivos vía red. El SSW soporta a través del módulo de comunicación Anybus-CC, tres protocolos bastante difundidos en la industria: DeviceNet, Profibus DP-V1 y EtherNet/IP. A seguir serán presentadas las características de los módulos Anybus-CC disponibles para el SSW, bien como los protocolos utilizados por estos módulos. SSW7000 | 8 Kits Accesorios (Módulos Activos) 2 KITS ACCESORIOS (MÓDULOS ACTIVOS) Para que el SSW pueda operar en las redes Fieldbus a través de los protocolos DeviceNet, Profibus DP-V1 o EtherNet/IP es necesario utilizar un de los kits de comunicación presentados a seguir. Informaciones de cómo proceder para la instalación de estos módulos pueden ser obtenidas en el guía rápido que acompaña el kit. 2.1 DEVICENET 2.1.1 Kit DEVICENET-05 2.1.2 Ítem WEG: 10413655. Formado por el módulo de comunicación Anybus ABCC-DEV, un guía rápido de instalación y una llave torx para fijación del módulo. Interfaz certificada por la ODVA. Permite la parametrización del SSW vía software de configuración d red. Terminales del Conector El módulo para comunicación DeviceNet posee un conector plug-in varón con los siguientes terminales: Tabla 2.1: Terminales del conector plug-in para DeviceNet. Terminal 1 Nombre 2 CAN_L 3 Shield Blindaje del cable 4 CAN_H V+ 5 2.1.3 Función de la Polo negativo alimentación. Señal CAN_L V- fuente de Señal CAN_H Polo positivo de la fuente de alimentación. Señalizaciones led MS: led bicolor (verde/rojo). Indica el estado del módulo de comunicación. led NS: led bicolor (verde/rojo). Indica el estado de la red DeviceNet. Para una mejor interpretación de las señalizaciones arriba mencionadas, consulte las secciones 5.9 y 5.10. 2.1.4 Conexión con la Red Para la interconexión del SSW utilizando la interfaz activa DeviceNet, los siguientes puntos deben ser observados: Recomiéndase la utilización de cables específicos para redes CAN/DeviceNet. Poner a la tierra la malla del cable (blindaje) solamente en un punto, evitando así loops de corriente. Este punto comúnmente es en la propia fuente de alimentación de la red. Si existir más de una fuente de alimentación, todas deberán estar referenciadas al mismo punto de tierra. Instalación de resistores de terminación solamente en los extremos del bus principal, mismo que existan derivaciones. SSW7000 | 9 Kits Accesorios (Módulos Activos) La fuente de alimentación de la red debe ser suficiente para suministrar la corriente requerida por todos los transceivers de los equipos. El módulo DeviceNet del SSW consume alrededor de 50mA. 2.1.5 Configuración del Módulo Para configurar el módulo DeviceNet siga los pasos indicados abajo: Con el SSW apagado instale el módulo en el conector XC44. Certifíquese de que el módulo este correctamente encajado y fijado por los tornillos. Energice el SSW. Observe el contenido del parámetro P0723. Veja si el módulo fue reconocido. La detección es hecha de forma automática y no requiere intervención del usuario. El led MS del módulo debe encender en el color verde sólido. Durante la fase de reconocimiento del módulo será exhibido un mensaje de aviso en la HMI del producto. Ajuste la dirección del SSW en la red a través del parámetro P0725. - Valores válidos: 0 a 63. Ajuste la tasa de comunicación en el P0726. - 0 = 125kbps. - 1 = 250kbps. - 2 = 500kbps. - 3 = Autobaud. La cantidad de palabras que desea comunicar con el maestre de la red es definida automáticamente (ver sección 4.2). El padrón es 1 word de entrada y salida. Este mismo valor deberá ser ajustado en el maestre DeviceNet. Interrumpa la alimentación del SSW y reestablezca para que los cambios tengan efecto. Conecte el cable de red en el módulo. Registre el archivo de configuración (archivo EDS) en el software de configuración de la red 1 . Adicione el SSW en el “scan list” del maestro. En el software de configuración de la red elija un método para el intercambio de datos con el maestro, o sea, polled, change of state, cyclic o bit-strobe. El módulo DeviceNet el SSW soporta todos estos tipos de datos de I/O, además del explicit (datos acíclicos). Si todo se encuentra correctamente configurado, el led NS del módulo encenderá en sólido verde. Es en esta condición que ocurre efectivamente el intercambio de datos cíclicos entre el SSW y el maestro de la red. Para más informaciones a respecto de los parámetros mencionados arriba consulte la sección 3. 2.1.6 Acceso a los Parámetros Luego de registrar el archivo EDS en el software de configuración de red, el usuario tendrá acceso al listado completa de los parámetros del equipo, los cuales pueden ser accedidos vía “explicit messages”. Para mayores detalles de la utilización de este recurso, consulte la documentación del software de programación del PLC. 1 El SSW con módulo de comunicación DeviceNet será reconocido por el software de configuración de la red como Anybus-CC DeviceNet. SSW7000 | 10 Kits Accesorios (Módulos Activos) 2.2 PROFIBUS DP-V1 2.2.1 Kit PROFIBUS-05 2.2.2 ítem WEG: 10413654. Formado por el módulo de comunicación Anybus ABCC-DPV1, un guía rápido de instalación y una llave torx para la fijación del módulo. Interfaz certificada por el Profibus International. Soporta funciones DP-V1 (mensajes acíclicos). Terminales del Conector El módulo para comunicación Profibus DP-V1 posee un conector DB9 varón con los siguientes terminales: Tabla 2.2: Terminales del conector DB9 varón para Profibus2. 2.2.3 Terminal 1 2 3 4 5 Nombre B-Line (+) RTS GND 6 +5V 7 8 9 A-Line (-) - Función RxD/TxD positivo Request To Send Tierra (aislado del circuito RS485) +5V para terminación activa (aislado del circuito RS485) RxD/TxD negativo - Señalizaciones led ST: led bicolor (verde/rojo). Indica el estado del módulo de comunicación. led OP: led bicolor (verde/rojo). Indica el estado del modo de operación. Para una mejor interpretación de las señalizaciones arriba mencionada, por gentileza consultar las secciones 6.7 y 6.8. 2.2.4 Conexión con la Red Para la interconexión del SSW utilizando la interfaz activa Profibus, los siguientes puntos deben ser observados: 2 Recomiéndase la utilización de cable par tranzado blindado, de preferencia específico para Profibus. El conector también debe ser compatible con la especificación del protocolo Profibus. La instalación del cable debe ser hecha separadamente (y si posible distante) de los cables utilizados para la alimentación de la potencia. Todos los dispositivos de la red deben estar debidamente puestos a tierra, si posible en el mismo punto. El blindaje del cable también debe ser conectado a la tierra de protección. El propio conector Profibus generalmente posee un espacio para la conexión de la malla del cable. El SSW exige la utilización de un conector 180º. SSW7000 | 11 Kits Accesorios (Módulos Activos) Instalación de resistores de terminación solamente en los extremos del bus principal, mismo que existan derivaciones. En general, llaves para la habilitación de estos resistores están presentes en el propio conector Profibus. 2.2.5 Configuración del Módulo Para configurar el módulo Profibus DP-V1 siga los pasos presentados abajo: Con el SSW apagado instale el módulo en el conector XC44. Certifíquese de que ele se encuentra correctamente encajado y fijado por los tornillos. Energice el SSW. Observe el contenido del parámetro P0723. Observe si el módulo fue reconocido. La detección es hecha de forma automática y no requiere intervención del usuario. El led ST del módulo debe encender sólido verde. Durante la fase de reconocimiento del módulo será exhibido un mensaje de aviso en la HMI del producto. Ajuste la dirección del SSW en la red a través del parámetro P0725. - Valores válidos: 1 a 126. No es necesario ajustar la tasa de comunicación del módulo. Profibus utiliza autobaud y por lo tanto esta configuración es hecha en el maestro de la red. La cantidad de palabras que se desea comunicar con el maestro de la red es definida automáticamente (ver sección 4.2). El padrón es 1 word de entrada y salida. Este mismo valor deberá ser ajustado en el maestro Profibus. Interrumpa la alimentación del SSW y reestablezca nuevamente para que los cambios tengan efecto. Registre el archivo de configuración (archivo GSD) en el software de configuración de la red 3 . Adicione el SSW en la lista de dispositivos del maestro, ajustando el número de palabras conforme programado en el SSW. Conecte el cable de red. Su todo se encuentra correctamente configurado, el led OP del módulo encenderá en sólido verde. Es en esta condición que ocurre efectivamente el intercambio de datos cíclicos entre el SSW y el maestro de la red. Para más informaciones a respecto de los parámetros arriba mencionados, por gentileza consultar la sección 3. 2.2.6 Acceso a los Parámetros El kit de comunicación PROFIBUS-05 permite servicios de lectura/escrita en parámetros a través de funciones acíclicas DP-V1. El mapeado de los parámetros es hecho con base en la dirección slot e index, conforme presentado en las ecuaciones abajo: Slot: (número del parámetro - 1) / 255. Index: (número del parámetro -1) MOD 255. Observación: MOD representa el resto de la división entera. 2.3 2.3.1 ETHERNET/IP Kit ETHERNETIP-05 Ítem WEG: 10509967. Formado por el módulo de comunicación Anybus ABCC-EIP, un guía rápido de instalación y una llave torx para fijación del módulo. Conector RJ45 estándar. Interfaz certificada por la ODVA. Permite acceso (lectura/escrita) a determinados parámetros vía WEB. 3 El SSW con módulo de comunicación Profibus DP-V1 será reconocido por el software de configuración de la red como Anybus-CC Profibus DP-V1. SSW7000 | 12 Kits Accesorios (Módulos Activos) 2.3.2 Conector El módulo para comunicación EtherNet/IP posee un conector RJ45 hembra común. El mismo padrón (T-568A o T-568B) de montaje utilizado en los cables de las redes de oficinas también puede ser adoptado para el ambiente industrial. Se debe verificar, sin embargo, el local de la instalación del SSW. Cables y conectores normalmente utilizados en redes de oficinas acostumbran ser frágiles. No soportan altas temperaturas, altas tensiones mecánicas, vibraciones excesivas y no poseen alto grado de protección. El responsable por la instalación de la planta debe evaluar estos factores y sugerir adaptaciones conforme la necesidad. 2.3.3 Señalizaciones led MS: led bicolor (verde/rojo). Indica el estado del módulo de comunicación. led NS: led bicolor (verde/rojo). Indica el estado de la red EtherNet/IP. led LINK: led verde. Indica conexión (link) y también actividad en la red. Para una mejor interpretación de las señalizaciones arriba presentadas, consulte las secciones 7.6, 7.7 y 7.8. 2.3.4 Conexión con la Red Para la interconexión del SSW utilizando la interfaz activa EtherNet/IP, los siguientes puntos deben ser observados: El SSW debe ser conectada a una red EtherNet/IP, de preferencia, a través de switches. Hubs no son recomendados, pues no utilizan el canal de forma eficiente (grande número de colisiones). La topología más común es en estrella, exactamente como es hecho con las redes de computadores. Recomiéndase utilizar equipos (cables, switches) preparados para el ambiente industrial. Cada segmento de cable (switch ⇔ SSW) debe tener en el máximo 90m. 2.3.5 Configuración del Módulo Para configurar el módulo EtherNet/IP siga los pasos indicados abajo: Con el SSW sin alimentación, instale el módulo en el conector XC44. Certifíquese de que ele está correctamente encajado y fijado por los tornillos. Energice el SSW. Observe el contenido del parámetro P0723. Verifique si el módulo fue reconocido. La detección es hecha de forma automática y no requiere intervención del usuario. Los LEDs MS y NS del módulo deben estar parpadeando en verde 4 . Conecte un cable de rede al módulo. La otra extremidad del cable deberá estar conectada a un hub/switch o, eventualmente, a un PC (para conexión PC ⇔ SSW utilice un cable cross-over). Si el cable de red se encuentra correctamente instalado, el led LINK encenderá verde sólido indicando conexión realizada con suceso. Si eso no ocurrir, certifíquese de que el cable se encuentra en buenas condiciones y que el hub/switch está encendido. Con la ayuda de un PC conectado en la misma red que el SSW con kit EtherNet/IP, ejecute el programa HMS AnyBus IPconfig 5 . Este software hará una barredura en la red con el objetivo de encontrar el módulo. En el ejemplo abajo, fue encontrado un módulo cuya dirección IP es 192.168.0.4. 4 El SSW con módulo de comunicación EtherNet/IP será reconocido por el software de configuración de la red como Anybus-CC EtherNet/IP. 5 Disponible en el CD-ROM que acompaña el SSW. SSW7000 | 13 Kits Accesorios (Módulos Activos) Para cambiar estas configuraciones, haga doble clic sobre la dirección IP del módulo. La ventana abajo será exhibida. Ajuste estos parámetros de acuerdo con la red en la cual el SSW será instalado. Recuérdese que la dirección IP es única, o sea, cada equipo en la red posee el suyo. La duplicidad de IP es falla grabe y provoca serios problemas de comunicación entre los dispositivos. La cantidad de palabras que se desea comunicar con el maestro de la red es definida automáticamente (ver sección 4.2). El padrón es 1 word de entrada y salida. Exactamente este mismo valor deberá ser ajustado en el maestro EtherNet/IP. Conecte el cable de red en el módulo. Registre el archivo de configuración (archivo EDS) en el software de configuración de la red 4. Si todo se encuentra correctamente configurado, el led NS del módulo encenderá en sólido verde y el led LINK empezara a parpadear indicando actividad normal en la red. Para más informaciones a respecto de los parámetros mencionados arriba, consulte la sección 3. 2.3.6 Tasa de Comunicación El SSW con kit EtherNet/IP opera en redes con tasas de 10Mbps o 100Mbps, y en modo half-duplex o fullduplex. Cuando operando a 100Mbps full-duplex, la tasa de transmisión de datos efectiva será el doble, pasando a 200Mbps. El ajuste de la tasa es hecho solamente vía software, conforme presentado abajo: Para hacer tal ajuste es necesario un PC conectado en la misma red (mismo rango de dirección IP) del SSW y un navegador Internet. Abra el navegador y digite el hostname o dirección IP del SSW. En el ejemplo abajo utilizamos el IP 192.168.0.4. SSW7000 | 14 Kits Accesorios (Módulos Activos) Haga Clic en ´Network Interface´. Una ventana con informaciones a respecto del módulo de comunicación será exhibida. A seguir haga clic en ´Network Configuration´. Para ajustar la tasa de comunicación seleccione la opción ‘Comm Settings’. Guarde las modificaciones haciendo clic sobre el botón ‘Store Settings’. SSW7000 | 15 Kits Accesorios (Módulos Activos) 2.3.7 Acceso a los Parámetros vía WEB El SSW permite el acceso a la lectura y a la escrita de determinados parámetros previamente programados por el usuario vía WEB (ver sección 7). Este recurso torna posible al operador monitorear el estado del SSW, simplemente para eso tener un computador con acceso a la red de la planta industrial. Para utilizar esta función siga los pasos indicados abajo: Certifíquese que el SSW se encuentra online. Verifique el estado de la comunicación Anybus a través del parámetro P0724. Nuevamente es necesario un PC conectado en la misma red (mismo rango de dirección IP) del SSW y un navegador Internet. Abra el navegador y digite el hostname o dirección IP del SSW. En este ejemplo, el SSW posee el IP 192.168.0.4. La ventana presentada en la Figura 2.1 será exhibida. Haga clic en ‘Parameter Data’. Otra ventana conteniendo los parámetros de lectura y escrita será exhibida. En este caso, dos parámetros de lectura (Estado Lógico y Velocidad 13 bits) y dos parámetros de escrita (Controle Anybus-CC y Ref. Vel. Anybus-CC) son presentados. Esta ventana irá presentar todos los parámetros programados por el usuario. Importante: La escrita de parámetros vía WEB (acíclica) es hecha de forma semejante a los datos de I/O (cíclicos). Así, si una determinada variable esta accesible tanto a través de conexiones cíclicas cuanto acíclicas, SSW7000 | 16 Kits Accesorios (Módulos Activos) una será sobrescrita por la otra. En el caso arriba, una escrita en la palabra de ‘Controle Anybus-CC’ será case que inmediatamente sobrescrita por el valor enviado a través de la conexión cíclica de I/O. Lo mismo ocurre con la palabra de ‘Ref. Vel Anybus-CC’. Se tiene, en este caso, el sentimiento erróneo de que el comando no fue ejecutado. SSW7000 | 17 Kits Accesorios (Módulos Pasivos) 3 KITS ACCESORIOS (MÓDULOS PASIVOS) Para se tener una interfaz RS232 o una RS485/422 en el SSW, se puede utilizar uno de los kits de comunicación descritos a seguir. El funcionamiento de estos módulos sigue el mismo principio de la interfaz serie. Por este motivo, no es posible utilizarlos simultáneamente con los kits de comunicación RS485-01, RS232-01 y CAN/RS485-01. Caso eso ocurra, el mensaje de alarma A130 será presentada en la HMI para indicar incompatibilidad de hardware. Estos dispositivos pasivos funcionan solo como conversores de la camada física, no realizando cualquier procesamiento sobre el flujo de datos. O sea, cualquier protocolo serie programado en el P0312 (Modbus-RTU, TP) puede ser utilizado sobre estas interfases. Para más informaciones a respecto del funcionamiento de estos módulos pasivos, consulte el Manual del Usuario Modbus-RTU del SSW7000. Instrucciones a respecto de la instalación de estos módulos pueden ser obtenidas en el guía rápido que acompaña el kit. 3.1 RS232 3.2 KIT RS232-05 3.3 Ítem WEG: 10413656. Formado por el módulo de comunicación Anybus ABCCRS232 (figura al lado), un guía rápido de instalación y una llave torx para fijación del módulo. Permite tasas de transmisión de hasta 115.2kbps. TERMINALES DEL CONECTOR El módulo de interfaz RS232 posee un conector DB9 varón con los siguientes terminales: Tabla 3.1: Terminales del conector DB9 varón para RS232 Terminal 3.3.1 Nombr e Función 1 - - 2 RxD Recepción de datos RS232 3 TxD Transmisión de datos RS232 4 - - 5 GND Tierra 6 - - 7 RTS Request To Send 8 - - 9 - - Señalizaciones led PWR: led verde. Cuando acceso, indica que el módulo está alimentado. SSW7000 | 18 Kits Accesorios (Módulos Pasivos) 3.3.2 Conexión con la Red Para la conexión del SSW utilizando la interfaz pasiva RS232, los siguientes puntos deben ser observados: Utilice cables de buena calidad, de preferencia blindados. Mantenga la longitud del cable dentro de los límites estipulados por la norma, en general de la orden de 10m. Evite pasarlo próximo de los cables de potencia y alimentación. 3.4 RS485/422 3.4.1 Kit RS485-05 3.4.2 Ítem WEG: 10413657. Formado por el módulo de comunicación Anybus ABCC-RS485 (figura al lado), un guía rápido de instalación y una llave torx para fijación del módulo. Permite tasas de transmisión de hasta 115.2kbps. Terminales del Conector El módulo de interfaz RS485/422 posee un conector DB9 hembra con los siguientes terminales: Tabla 3.2: Terminales del conector DB9 hembra para RS485/422 Terminal 1 2 3 4 5 6 7 8 9 3.4.3 Modo RS422 Term Pwr Mode Select GND RxD RxD (invertido) TxD TxD (invertido) Modo RS485 Term Pwr Mode Select GND RxD/TxD RxD/TxD (invertido) Función +5V para terminación activa (aislado) No conectado: Modo RS485, GND: Modo RS422 Tierra aislada Línea de recepción de datos (Modo RS422) No utilizado (Modo RS485) Línea de transmisión de datos (Modo RS422) Línea de datos bidireccional (Modo RS485) Señalizaciones led PWR: led verde. Cuando acceso, indica que el módulo está alimentado. 3.4.4 Conexión con la Red Para la conexión del SSW utilizando la interfaz pasiva RS485, los siguientes puntos deben ser observados: Utilice cables blindados de buena calidad. Mantenga la longitud del cable dentro de los límites estipulados por la norma, en general de la orden de 1000m. Mismo RS485 sendo más robusto que RS232 por utilizar señales en modo diferencial (señales balanceados), evite pasarlo muy próximo de cables de potencia. SSW7000 | 19 Kits Accesorios (Módulos Pasivos) Coloque resistores de terminación entre los cables de las señales de datos (RxD/TxD y TxD/RxD) de los nudos de las extremidades de la red. Eso evitará reflexiones en la línea. SSW7000 | 20 Parametrización del SSW 4 PARAMETRIZACIÓN DEL SSW A seguir serán presentados solo los parámetros del SSW que poseen relación con la comunicación AnybusCC. 4.1 SÍMBOLOS PARA DESCRIPCIÓN DE LAS PROPIEDADES RO: CFG: Net: Serie: USB: Anybus: Parámetro solamente de lectura. Parámetro solamente puede ser modificado con el eje del motor parado. Parámetro visible a través de la HMI si el SSW poseer interfaz de red instalada – RS232, RS485, CAN, Anybus-CC, Profibus – o si la interfaz USB se encuentra conectada. Parámetro visible a través de la HMI si el SSW poseer interfaz RS232 o RS485 instalada. Parámetro visible a través de la HMI si la interfaz USB del SSW se encuentra conectada. Parámetro visible a través de la HMI si el módulo Anybus-CC se encuentra conectado. P0220 – SELECCIÓN FONTE MODO LOCAL/REMOTO P0229 – SELECCIÓN DE LA FUENTE DEL COMANDOS EM MODO LOCAL P0230 – SELECCIÓN DE LA FUENTE DEL COMANDOS EM MODO REMOTO Estos parámetros son utilizados en la configuración de la fuente de comandos para el modo local y para el modo remoto del SSW. Para que el SSW sea controlado a través de la interfaz Anybus-CC, se debe seleccionar una de las opciones ‘Anybus-CC’ disponibles en los parámetros. La descripción detallada de estos parámetros encuéntrase en el Manual de Programación del Arrancador Suave SSW7000. P0313 – ACCIÓN DE LOS ERRORES DE COMUNICACIÓN SERIE Rango de Valores: 0 = Inactivo 1 = Para por Rampa 2 = Deshabilita General 3 = Va para Local 4 = Va para Local y mantiene mandos y referencia 5 = Causa Falla Propiedades: CFG, Net Grupos de acceso vía HMI: 01 GRUPOS PARÁMETROS... ∟ 33 Comunicación .......... .. . ∟ 131 Serie RS232/485 . Padrón: 0 Descripción: Permite programar la acción que el SSW debe ejecutar caso ocurra algún problema de comunicación. SSW7000 | 21 Parametrización del SSW Tabla 4.1: Valores para el parámetro P0313. Opciones 0 = Inactivo 1 = Para por Rampa 2 = Deshabilita General 3 = Va para Local 0 = Inactivo 5 = Causa Falla Descripción Ninguna acción es tomada, el SSW permanece en el estado actual. El mando de parada por rampa es ejecutado, y el motor para de acuerdo con la rampa de desaceleración programada. El SSW es deshabilitado general, y el motor para por inercia. El SSW es comandado para el modo local. Ninguna acción es tomada, el SSW permanece en el estado actual. En el lugar de alarma, un error de comunicación causa una falla en el SSW, siendo necesario hacer el reset de fallas del SSW para que lo mismo regrese a su operación normal. Para la interfaz Anybus-CC, se considera error de comunicación los eventos del módulo Anybus-CC offline (alarma A129/falla F229) y error de acceso al módulo Anybus-CC (alarma A130/falla F230). Las acciones descritas en este parámetro son ejecutadas a través de la escrita automática de los respectivos bits en el parámetro de control vía Anybus-CC – P0686. Para que la acción ejecutada tenga efecto, es necesario que el SSW se encuentre programado para ser controlado vía Anybus. Esta programación es hecha a través de los parámetros P0220, P229 y P0230. P0680 – PALABRA DE ESTADO DEL SSW Rango de 0000h – FFFFh Valores: Propiedades: RO Grupos de acceso vía HMI: 01 GRUPOS PARÁMETROS... ∟ 33 Comunicación ......... ... . ∟ 130 Estados/ Comandos . Padrón: - 9 8 7 6 En modo de configuración By pass Antihorario Sentido de giro Frenado Remoto Desaceleración Alarma Función 5 4 3 2 1 0 Gira/Para 10 Habilitado general 11 JOG 12 Aceleración 13 Intervalo luego de la parada 14 Tensión Plena 15 Alimentación de la potencia Bits Falla Descripción: Permite al usuario identificar el estado en que se encuentra el SSW. SSW7000 | 22 Parametrización del SSW Tabla 4.2: Funciones de los bits para el parámetro P0680. Bits Bit 0 Gira/Para Bit 1 Habilita General Bit 2 JOG Bit 3 Aceleración Bit 4 Intervalo Luego de la Parada Bit 5 Tensión Plena Bit 6 Alarma Bit 7 Desaceleración Bit 8 LOC/REM Bit 9 Frenado Bit 10 Sentido de Giro Bit 11 Antihorario Bit 12 By-pass Bit 13 En Modo de Configuración Bit 14 Alimentación de la Potencia Bit 15 En Falla Valores 0: eje del motor parado. 1: eje del motor girando. 0: cuando deshabilitado general por cualquier un de los medios. 1: cuando está habilitado general por todos los medios. 0: función JOG inactiva. 1: función JOG activa. 0: no está acelerando. 1: durante toda la aceleración. 0: Intervalo luego de la parada deshabilitado. 1: ejecuta el tiempo ajustado en P0831. 0: sin tensión plena sobre el motor. 1: con tensión plena sobre el motor. 0: sin alarma. 1: con alarma. Obs.: el número de la alarma puede ser leído a través del parámetro P0021 – Alarma Actual. 0: no está desacelerando. 1: durante toda la desaceleración. 0: local. 1: remoto. 0: no está en la condición de frenado. 1: durante el frenado. 0: no está invirtiendo el sentido de giro. 1: durante el proceso de cambio del sentido de giro. 0: horario. 1: antihorario. 0 = con bypass abierto. 1 = con bypass cerrado. 0: operando normalmente. 1: en modo de configuración. Indica una condición especial en la cual el SSW no puede ser habilitado: Ejecutando rutina de autoajuste. Ejecutando rutina de puesta en marcha orientada. Ejecutando función copy de la HMI. Ejecutando rutina autoguiada de la tarjeta de memoria flash. Posee incompatibilidad de parametrización. Sin alimentación en el circuito de potencia del SSW. Obs.: Es posible obtener la descripción exacta del modo especial de operación en el parámetro P0692. 0: sin alimentación de la potencia. 1: con alimentación de la potencia en las 3 fases arriba de 15V. 0: SSW no esta en el estado de falla. 1: Algúna falla registrado en el SSW. Obs.: El número de la falla puede ser leído a través del parámetro P0020 – Falla Actual. P0686 – PALABRA DE CONTROL ANYBUS-CC Rango de 0000h – FFFFh Valores: Propiedades: RO, Anybus Grupos de acceso vía HMI: 01 GRUPOS PARÁMETROS... ∟ 33 Comunicación ............ . ∟ 132 AnyBus . Padrón: 0000h Descripción: Palabra de mando del SSW vía interfaz Anybus-CC. Este parámetro solamente puede ser modificado vía interfaz Anybus-CC. Para las demás fuentes (HMI, Serie, etc.) elle se comporta como un parámetro solamente de lectura. Para que los mandos escritos en este parámetro sean ejecutados, es necesario que el SSW se encuentre programado para ser controlado vía Anybus-CC. Esta programación es hecha a través de los parámetros P0220 y P0229 y P0230. Cada bit de esta palabra representa un mando que puede ser ejecutado en el SSW. SSW7000 | 23 6 5 4 3 2 Reservado Reservado LOC/REM Sentido de Giro JOG Función 1 0 Gira/Para 7 Habilita General 15 a 8 Reset de Fallas Bits Reservado Parametrización del SSW Tabla 4.3: Funciones de los bits para el parámetro P0686, Bits Bit 0 Gira/Para Bit 1 Habilita General Bit 2 JOG Bit 3 Sentido de Giro Bit 4 LOC/REM Bit 5 Reservado Bit 6 Reservado Bit 7 Reset de Falla Bits 8 a 15 Reservado Valores 0: Para el eje del motor por rampa de desaceleración (cuando programado). 1: Gira el eje del motor de acuerdo con la rampa de aceleración hasta alcanzar el valor de la referencia de velocidad. 0: deshabilita general 1: habilita general. 0: sin JOG. 1: con JOG. 0: sentido horario. 1: sentido antihorario. 0: local. 1: remoto. Reservado. Reservado. 0: sin comando. 0: 1: ejecuta reset (caso se encuentre en error). Reservado. P0692 – PALABRA DE ESTADO DEL MODO DE CONFIGURACIÓN Rango de 0000h – FFFFh Valores: Propiedades: Net Grupos de acceso vía HMI: 01 GRUPOS PARÁMETROS... ∟ 33 Comunicación ........ ... . ∟ 130 Estados/Comandos Padrón: - . 4 3 2 1 0 Modo Prueba Esp.Com.C1-C2 Start-up Orie. Necesario Reset 5 Copy Mem.Card 6 Copy HMI 7 Copy Firmware 8 Tipos Control Función 15 a 9 Incompatibles Bits Reservado Descripción: Permite a usuario identificar el modo en que se encuentra el SSW. SSW7000 | 24 Parametrización del SSW Tabla 4.4: Funciones de los bits para el parámetro P0692. Bits Bit 0 Start-up Orientado Bit 1 Esp.Com.C1-C2 Bit 2 Modo Teste Bit 3 Copy Mem.Card Bit 4 Copy HMI Bit 5 Copy Firmware Bit 6 Neces. Reset Bit 7 Tipos Control Bit 8 Incompatibles Bits 9 a 15 Reservado Valores 0: No está en Puesta en Marcha Orientada. 1: Está en Puesta en Marcha Orientada 0: Comunicación entre C1 y C2 normal. 1: Esperando comunicación entre C1 y C2. 0: No está en modo Teste. 1: En modo Teste. 0: No está copiando los datos. 1: Copiando los datos de la tarjeta de memoria. 0: No está copiado los datos. 1: Copiando dados para/da HMI. 0: No está copiando los datos. 1: Copiando el Firmware. 0: OK. 1: Necesita Reset. 0: No está en alteración del tipo de control. 1: Está en alteración del tipo de control. 0: OK. 1: Incompatibilidad entre parámetros. Reservado. P0693 – PALABRA DE CONTROL DEL MODO DE CONFIGURACIÓN Rango de 0000h – FFFFh Valores: Propiedades: Net Grupos de acceso vía HMI: 01 GRUPOS PARÁMETROS... ∟ 33 Comunicación ........... . . ∟ 130 Estados/Comandos Padrón: - . 4 3 2 1 0 Aborta Prueba Reservado Aborta Start-up 5 Reservado 6 Reservado Reservado Función 7 Reservado 15 a 8 Reservado Bits Aborta Control Descripción: Permite al usuario modificar el modo de operación del SSW. Tabla 4.5: Funciones de los bits para el parámetro P0693. Bits Bit 0 Interrumpe Start-up Bit 1 Reservado Bit 2 Aborta Prueba Bit 3 a 6 Reservado Bit 7 Aborta Control Bits 8 a 15 Reservado Valores 0: No Interrumpe la Puesta en Marcha. 1: Interrumpe la Puesta en Marcha. Reservado. 0: No Interrumpe el Modo Prueba. 1: Interrumpe el Modo Prueba. Reservado. 0: No Interrumpe el alteración del tipo del control. 1: Interrumpe el alteración del tipo del control. Reservado. SSW7000 | 25 Parametrización del SSW P0695 – VALOR PARA LAS SALIDAS DIGITALES Rango de 0000h – FFFFh Valores: Propiedades: Net Grupos de acceso vía HMI: 01 GRUPOS PARÁMETROS... ∟ 33 Comunicación ........ .... . ∟ 130 Estados/Comandos . Padrón: 0000h Descripción: Posibilita el mando de las salidas digitales a través de la interfaz de red (Serie, USB, Anybus-CC, etc.). Este parámetro no puede ser modificado a través de la HMI. 1 0 Valor para DO1 (DO1) Función 2 Valor para DO2 (DO2) 15 a 3 Reservado Bits Valor para DO3 (DO3) Cada bit de este parámetro corresponde al valor deseado para una salida digital. Para que la salida digital correspondiente pueda ser comandada de acuerdo con este contenido, es necesaria que su función sea programada para “Contenido P0695”, en los parámetros P0275 a P0277. Tabla 4.6: Funciones de los bits para el parámetro P0695. Bits Bit 0 Valor para DO1 (DO1) Bit 1 Valor para DO2 (DO2) Bit 2 Valor para DO3 (DO3) Bits 3 a 15 Valor 0: salida DO1 abierta 1: salida DO1 cerrada 0: salida DO2 abierta 1: salida DO2 cerrada 0: salida DO3 abierta 1: salida DO3 cerrada Reservado P0696 – VALOR 1 PARA SALIDAS ANALÓGICAS P0697 – VALOR 2 PARA SALIDAS ANALÓGICAS Rango de -32768 – 32767 Valores: Propiedades: Net Grupos de acceso vía HMI: 01 GRUPOS PARÁMETROS... ∟ 33 Comunicación ............ . ∟ 130 Estados/Comandos . Padrón: 0 Descripción: Posibilita el mando de las salidas analógicas a través de la interfaz de red (Serie, USB, Anybus-CC, etc.). Este parámetro no puede ser modificado a través de la HMI. El valor escrito en estos parámetros es utilizado como valor para la salida analógica, desde que la función de la salida analógica deseada sea programada para “Contenido P0696/7”, en los parámetros P0251 y P0254. El valor debe ser escrito en una escala de 15 bits (7FFFh = 32767) 6 para representar 100% del valor deseado para la salida, o sea: 6 P0696 = 0000h (0 decimal) P0696 = 7FFFh (32767 decimal) → valor para la salida analógica = 0 % → valor para la salida analógica = 100 % Para la resolución real de la salida, consulte el Manual del Usuario del Arrancador Suave SSW7000. SSW7000 | 26 Parametrización del SSW En este ejemplo fue presentado el parámetro P0696, más la misma escala es utilizada para el parámetro P0697. Por ejemplo, desease controlar el valor de la salida analógica 1 a través de la interfaz Anybus. En este caso, débese hacer la siguiente programación: Elegir un de los parámetros P0696 o P0697 para ser el valor utilizado por la salida analógica 1. En este ejemplo, vamos elegir el P0696. Programar, en la función de la salida analógica 1 (P0254), la opción “Contenido P0696”. A través de la interfaz Anybus, escribir en el P0696 el valor deseado para la salida analógica 1, entre 0 y 100 %, de acuerdo con la escala del parámetro. ¡NOTA! Caso la salida analógica sea programada para operar de -10V hasta 10V, valores negativos para estos parámetros deben ser utilizados para comandar la salida con valores negativos de tensión, o sea,-32768 hasta 32767 representa una variación de -10V hasta 10V en la salida analógica. P0723 – IDENTIFICACIÓN DE LA ANYBUS Rango de 0 a 25 Valores: Propiedades: RO Grupos de acceso vía HMI: 01 GRUPOS PARÁMETROS... ∟ 33 Comunicación ........... . . ∟ 132 AnyBus . Padrón: - Descripción: Permite identificar el modelo del módulo Anybus-CC conectado al SSW. Tabla 4.7: Funciones del parámetro P0723. Opciones 0 = Inactivo 1 = RS232 2 = RS422 3 = USB 4 = Serie Server 5 = Bluetooth 6 = Zigbee 7 = WLAN 8...9 = Reservado 10 = RS485 11...15 = Reservado 16 = Profibus DP 17 = DeviceNet 18 = CANopen 19 = EtherNet/IP 20 = CC-Link 21 = Modbus-TCP 22 = Modbus-RTU 23 = Profinet IO 24 = Reservado 25 = Reservado Modelo Ninguno módulo de comunicación instalado Módulo pasivo RS232 Módulo pasivo RS485/422 instalado configurado para RS422 Módulo pasivo USB Módulo pasivo Serie Server (Ethernet) Módulo pasivo Bluetooth Módulo pasivo Zigbee Módulo pasivo WLAN Reservado para uso futuro Módulo pasivo RS485/422 instalado configurado para RS485 Reservado para uso futuro Módulo activo Profibus DP Módulo activo DeviceNet Módulo activo CANopen Módulo activo EtherNet/IP Módulo activo CC-Link Módulo activo Modbus-TCP Módulo activo Modbus-RTU Módulo activo Profinet IO Reservado para uso futuro Reservado para uso futuro y y SSW7000 | 27 Parametrización del SSW P0724 – ESTADO DE LA COMUNICACIÓN ANYBUS Rango de Valores: 0 = Inactivo 1 = No Soportado 2 = Error de Acceso 3 = Offline 4 = Online Propiedades: RO, Anybus Grupos de acceso vía HMI: 01 GRUPOS PARÁMETROS... ∟ 33 Comunicación ........... . . ∟ 132 AnyBus . Padrón: - Descripción: Suministra informaciones del estado del módulo de comunicación. Tabla 4.8: Funciones de los bits para el parámetro P0724. Estados 0 = Inactivo 1 = No soportado 2 = Error de Acceso 3 = Offline 4 = Online Descripción Sin módulo de comunicación Anybus-CC detectado. Módulo Anybus-CC detectado no es soportado por el SSW. Detectado problema en el acceso a los datos entre el SSW y el módulo de comunicación AnybusCC. Comunicación con problemas. No ha intercambio de datos cíclicos con el maestro. Comunicación normal. Intercambio de datos cíclicos y acíclicos efectiva entre el SSW y el maestro de la red. P0725 – DIRECCIÓN DE LA ANYBUS Rango de 0 a 255 Valores: Propiedades: Anybus Grupos de acceso vía HMI: 01 GRUPOS PARÁMETROS... ∟ 33 Comunicación ........... . . ∟ 132 AnyBus . Padrón: 0 Descripción: Permite configurar la dirección del SSW en la red. El rango de dirección cambia de acuerdo con el protocolo utilizado. Para DeviceNet el limite superior es 63 (0 a 63) y para Profibus es 126 (1 a 126). Para EtherNet/IP, la dirección de los nudos es hecha a través del software HMS AnyBus IPconfig, y sigue las reglas del Internet Protocol (IP). Para más detalles a respecto de la configuración del módulo EtherNet/IP consulte la sección 2.3.5 P0726 – TASA DE COMUNICACIÓN DE LA ANYBUS Rango de 0a3 Valores: Propiedades: Anybus Grupos de acceso vía HMI: 01 GRUPOS PARÁMETROS... ∟ 33 Comunicación .......... .. . ∟ 132 AnyBus . Padrón: 0 Descripción: Permite programar el valor deseado para la tasa de comunicación del módulo Anybus-CC, en bits por segundo. Esta tasa debe ser igual para todos los equipos conectados en la red y cambia de acuerdo con el protocolo utilizado. DeviceNet: 0=125kbps, 1=250kbps, 2=500kbps e 3=autobaud. SSW7000 | 28 Parametrización del SSW Profibus 7 : Auto-baud (tasa de comunicación definida por el maestro). EtherNet/IP7: 10/100Mbps half- o full-duplex (configuración a través del propio servidor WEB del módulo). 4.2 CANTIDAD DE PALABRAS DE COMUNICACIÓN El SSW presenta definición automática de la cantidad de palabras para la comunicación. El valor estándar de palabras de comunicación es 1 palabra de lectura (Parámetro P0680) y 1 palabra de escrita (Parámetro P0686). Los parámetros P0728 a P0750 definen los parámetros que podrán ser leídos y los parámetros P0751 a P0755 definen los parámetros que podrán ser escritos vía red de comunicación. Los parámetros P0728 a P0755 son inicializados con “0”, determinando que no existen otros parámetros para lectura o escrita. La definición automática de la cantidad de palabras para la comunicación verifica el valor de los parámetros P0728 a P0755. Si el valor es diferente de cero es incrementada una palabra en la cuantidad de palabras de lectura o escrita para comunicación. Sin embargo, se debe configurar P0728 a P0750 y P0751 a P0755 secuencialmente, pues la definición automática de la cuantidad de palabras para la comunicación es cancelada al encontrar el primero parámetro de lectura y escrita con valor igual a cero, no verificando los demás. Ejemplo: Desease monitorear los siguientes parámetros: P0001, P0002, P0003, P0004 y P0005. 1. Parametrización del SSW: P0728 = 1. P0729 = 2. P0730 = 3. P0731 = 4. P0732 = 20. P0733 a P0750 = 0. P0751 a P0755 = 0. 2. Luego de la parametrización de debe resetear el SSW. 3. En la inicialización del SSW es ejecutada la definición automática de la cantidad de palabras para la comunicación. El resultado de la definición automática es la siguiente cantidad: Lectura: 6 palabras: 1° Estado lógico (P0680). 2° contenido de P0001. 3° contenido de P0002. 4° contenido de P0003. 5° contenido de P0004. 6° contenido de P0020. Escrita: 1 palabra: 1° Control AnyBus-CC (P0686). 7 Parámetro no visible en la HMI. SSW7000 | 29 Parametrización del SSW P0728 – LECTURA #2 ANYBUS P0729 – LECTURA #3 ANYBUS P0730 – LECTURA #4 ANYBUS P0731 – LECTURA #5 ANYBUS P0732 – LECTURA #6 ANYBUS P0733 – LECTURA #7 ANYBUS P0734 – LECTURA #8 ANYBUS P0735 – LECTURA #9 ANYBUS P0736 – LECTURA #10 ANYBUS P0737 – LECTURA #11 ANYBUS P0738 – LECTURA #12 ANYBUS P0739 – LECTURA #13 ANYBUS P0740 – LECTURA #14 ANYBUS P0741 – LECTURA #15 ANYBUS P0742 – LECTURA #16 ANYBUS P0743 – LECTURA #17 ANYBUS P0744 – LECTURA #18 ANYBUS P0745 – LECTURA #19 ANYBUS P0746 – LECTURA #20 ANYBUS P0747 – LECTURA #21 ANYBUS P0748 – LECTURA #22 ANYBUS P0749 – LECTURA #23 ANYBUS P0750 – LECTURA #24 ANYBUS Rango de 0 a 1059 Valores: Propiedades: Anybus Grupos de acceso vía HMI: 01 GRUPOS PARÁMETROS... ∟ 33 Comunicación ........ .... . ∟ 132 AnyBus . Padrón: 0 Descripción: Estos parámetros permiten al usuario programar la lectura vía red de cualquier otro parámetro del equipo 8 . O sea, ellos contienen el número de otro parámetro. 8 Excepto parámetro P000 que es considerado inválido. SSW7000 | 30 Parametrización del SSW Por ejemplo, P0728=5. En este caso será enviado vía red el contenido del parámetro P0005 (frecuencia del motor). ¡NOTA! Toda modificación realizada en los parámetros P0728 a P0755 necesita del reset del SSW. P0751 – ESCRITA #2 ANYBUS P0752 – ESCRITA #3 ANYBUS P0753 – ESCRITA #4 ANYBUS P0754 – ESCRITA #5 ANYBUS P0755 – ESCRITA #6 ANYBUS Rango de 0 a 1059 Valores: Propiedades: Anybus Grupos de acceso vía HMI: 01 GRUPOS PARÁMETROS... ∟ 33 Comunicación .......... .. . ∟ 132 AnyBus Padrón: 0 . Descripción: Estos parámetros permiten al usuario programar la escrita vía red de cualquier otro parámetro del equipo 9 . O sea, ellos contienen el número de otro parámetro. Por ejemplo, P0734=100. En este caso será enviado vía red el contenido a ser escrito en el P0100. ¡NOTA! Toda modificación realizada en los parámetros P0728 a P0755 necesita del reset del SSW. 9 Excepto parámetro P000 que es considerado inválido. SSW7000 | 31 Protocolo DeviceNet 5 PROTOCOLO DEVICENET 5.1 INTRODUCCIÓN Presentado en 1994, DeviceNet es una implementación del protocolo Common Industrial Protocol (CIP) para redes de comunicación industrial. Desarrollado originalmente por la Allen-Bradley, tuvo su tecnología transferida para la ODVA que, desde entonces, mantiene, divulga y promueve el DeviceNet y otras redes basadas en el protocolo CIP 10 . Además de eso, utiliza el protocolo Controller Area Network (CAN) para el enlace de datos y acceso al medio, camadas 2 y 1 del modelo OSI/ISO, respectivamente. Utilizado principalmente en la interconexión de controladores industriales y dispositivos de entrada/salida (I/O), el protocolo sigue el modelo productor-consumidor, soporta múltiplos modos de comunicación y posee prioridad entre los mensajes. Es un sistema que puede ser configurado para operar tanto en una arquitectura maestro-esclavo cuanto en una arquitectura distribuída punto a punto. Además de eso, define dos tipos de mensajes, I/O (datos de proceso) y explicit (configuración y parametrización). Posee también mecanismos de detección de direcciones duplicadas y aislamiento de los nudos en caso de fallas críticos. Una red DeviceNet puede contener hasta 64 dispositivos, direcciones de 0 a 63. Cualquier un de estos puede ser utilizado. No ha cualquier restricción, aunque se deba evitar el 63, pues este acostumbra ser utilizado para fines de puesta en marcha. 5.2 CAMADA FÍSICA DeviceNet usa una topología de red del tipo tronco/derivación que permite que tanto el cableado de la señal cuanto de alimentación se encuentren presentes en el mismo cable. Esta alimentación, suministrada por una fuente conectada directamente en la red, alimenta los transceivers CAN de los nudos, y posee las siguientes características: 24Vdc. Salida DC aislada de la entrada AC. Capacidad de corriente compatible con los equipos instalados. El tamaño total de la red cambia de acuerdo con la tasa de transmisión utilizada, conforme presentado en la tabla abajo. Tabla 5.1: Tamaño de la red x Tasa de transmisión Tasa de transmisión Tamaño de la red 125kbps 500m 250kbps 250m Derivación Máximo Total 156m 6m 78m 500kbps 100m 39m Para evitar reflexiones de la señal en la línea, recomiéndase la instalación de resistores de terminación en los extremos de la red, pues la falta de estos puede provocar errores intermitentes. Este resistor debe poseer las siguientes características, conforme especificación del protocolo: 121Ω. 0,25W. 1% de tolerancia. En DeviceNet, diversos tipos de conectores pueden ser utilizados, tanto sellados cuanto abiertos. La definición del tipo a ser utilizado dependerá de la aplicación y del ambiente de operación del equipo. El SSW utiliza un 10 CIP representa, en la realidad, una familia de redes. DeviceNet, EtherNet/IP y ControlNet utilizan CIP en la camada de aplicación. La diferencia entre ellos está primordialmente en las camadas de enlace de datos y física. SSW7000 | 32 Protocolo DeviceNet conector del tipo plug-in de 5 vías cuyos terminales es presentado en la sección 2. Para una descripción completa de los conectores utilizados por el DeviceNet consulte la especificación del protocolo. 5.3 CAMADA DE ENLACE DE DATOS La camada de enlace de datos del DeviceNet es definida por la especificación del CAN, en la cual define dos estados posibles. dominante (nivel lógico 0) y recesivo (nivel lógico 1). Un nudo puede llevar la red al estado dominante si transmitir alguna información. Así, el bus solamente estará en el estado recesivo si no ocurrir nudos transmisores en el estado dominante. CAN utiliza el CSMA/NBA para acceder el medio físico. Eso significa que un nudo, antes de transmitir, debe verificar si el bus está libre. Caso si encuentre, entonces elle puede iniciar la transmisión de su telegrama. Caso no, debe aguardar. Sí más de un nudo acceder la red simultáneamente, un mecanismo basado en prioridad de mensaje entrará en acción para decidir cual de ellos tendrá prioridad sobre los otros. Este mecanismo es no destructivo, o sea, el mensaje es preservado mismo que ocurra colisión entre dos o más telegramas. CAN define cuatro tipos de telegramas (data, remote, overload, error). De estos, DeviceNet utiliza solo el frame de datos (data frame) y el frame de errores (error frame). Datos son transladados utilizándose el frame de datos. La estructura de este frame es presentada en la Figura 5.1. Ya los errores son indicados a través del frame de errores. CAN posee una verificación y un confinamiento de errores bastante robusto. Eso garantiza que un nudo con problemas no perjudique la comunicación en la red. 1 bit ACK Delimiter 7 bits ≥ 3 bits Interframe Space 1 bit End of Frame 1 bit ACK Slot 15 bits CRC Sequence 0-8 bytes Data Field 6 bits Control Field 1 bit RTR bit 11 bits Identifier 1 bit Start of Frame Interframe Space CRC Delimiter Para una descripción completa de los errores, consulte la especificación del CAN. Figura 5.1: Frame de datos CAN. 5.4 CAMADA DE TRANSPORTE Y RED DeviceNet requiere que una conexión sea establecida antes de ocurrir el intercambio de datos con el dispositivo. Para establecer esta conexión, cada nudo DeviceNet debe implementar el Unconnected Message Manager (UCMM) o el Group 2 Unconnected Port. Estos dos mecanismos de asignación utilizan mensajes del tipo explicit para establecer la conexión, que a seguir será utilizada para el intercambio de datos de proceso entre un nudo y otro. Este intercambio de datos utiliza mensaje del tipo I/O (ver ítem 5.7). Los telegramas DeviceNet son clasificados en grupos, el cual definen funciones y prioridades específicas. Estos telegramas utilizan el campo identificador (11 bits) del frame de datos CAN para identificar únicamente cada un de los mensajes, garantizando así el mecanismo de prioridades CAN. Un nudo DeviceNet puede ser cliente, servidor o ambos. Además de eso, clientes y servidores pueden ser productores y/o consumidores de mensajes. En un típico nudo cliente, por ejemplo, su conexión producirá requisiciones y consumirá respuestas. Otras conexiones de clientes o servidores solo consumirán mensajes. O sea, el protocolo proporciona diversas posibilidades de conexión entre los dispositivos. El protocolo dispone también de un recurso para detección de nudos con dirección (Mac ID) duplicados. Evitar que direcciones duplicadas ocurran es, en general, más eficiente que tentar ubicarlos después. SSW7000 | 33 Protocolo DeviceNet 5.5 CAMADA DE APLICACIÓN – PROTOCOLO CIP En la camada de aplicación, DeviceNet utiliza el Common Industrial Protocol (CIP). Tratase de un protocolo estrictamente orientado a objetos utilizado también por ControlNet y por EtherNet/IP. O sea, elle es independiente del medio físico y de la camada de enlace de datos. La Figura 5.2 presenta la estructura de este protocolo. CIP tiene dos objetivos principales: Transporte de datos de control de los dispositivos de I/O. Transporte de informaciones de configuración y diagnóstico del sistema siendo controlado. Un nudo (maestre o esclavo) DeviceNet es entonces modelado por un conjunto de objetos CIP, los cuales encapsulan datos y servicios y determinan así su comportamiento. Existen objetos obligatorios (todo dispositivo debe contener) y objetos opcionales. Objetos opcionales son aquellos que moldan el dispositivo conforme la categoría (llamado de perfil) a que pertenecen, tales como: AC/DC Drive, lector de código de barras o válvula neumática. Por ser diferentes, cada un de estos contendrá un conjunto también diferente de objetos. Para más informaciones, consulte la especificación del DeviceNet. Ella presenta el listado completo de los perfiles de dispositivos ya estandarizados por la ODVA, bien como los objetos que lo componen. 5.6 ARCHIVO DE CONFIGURACIÓN Todo nudo DeviceNet posee un archivo de configuración asociado 11 . Este archivo contiene informaciones importantes a respecto del funcionamiento del dispositivo y debe ser registrado en el software de configuración de red 12 . 11 12 Conocido por archivo EDS. El SSW con módulo de comunicación DeviceNet será reconocido por el software de configuración de la red con Anybus-CC DeviceNet. SSW7000 | 34 Protocolo DeviceNet Figura 5.2: Estructura en camadas del protocolo CIP. 5.7 MODOS DE COMUNICACIÓN El protocolo DeviceNet posee dos tipos básicos de mensajes, I/O y explicit. Cada un de ellos es adecuado a un determinado tipo de dato, conforme presentado a bajo: I/O: tipo de telegrama síncrono dedicado a la translación de datos prioritarios entre un productor y un o más consumidores. Divídese de acuerdo con el método de intercambio de datos. Los principales son: Polled: método de comunicación en que el maestro envía un telegrama a cada un de los esclavos de su lista (scan list). Así que recibe la solicitación, el esclavo contesta prontamente la solicitación del maestro. Este proceso es repetido hasta que todos sean consultados, reiniciando el ciclo. Bit-strobe: método de comunicación donde el maestro envía para la red un telegrama conteniendo 8 bytes de datos. Cada bit de estos 8 bytes representa un esclavo que, si direccionado, contesta de acuerdo con el programado. Change of State: método de comunicación donde el intercambio de datos entre maestro y esclavo ocurre solo cuando ocurrir cambios en los valores monitoreados/controlados, hasta un cierto limite de tiempo. Cuando este límite es alcanzado, la transmisión y recepción ocurrirá mismo que no se tenga ocurrido modificaciones. La configuración de esta variable de tiempo es hecha en el programa de configuración de la red. Cyclic: otro método de comunicación muy semejante al anterior. La única diferencia se queda por cuenta de la producción y consumo de mensajes. En este tipo, todo el intercambio de datos ocurre en intervalos regulares de tiempo, independiente si fueran modificados o no. Este período también es ajustado en el software de configuración de red. Explicit: tipo de telegrama de uso general y no prioritario. Utilizado principalmente en tareas asíncronas como parametrización y configuración del equipo. SSW7000 | 35 Protocolo DeviceNet 5.8 CONJUNTO DE CONEXIONES PREDEFINIDAS MAESTRO/ESCLAVO DeviceNet emplea fundamentalmente un modelo de mensajes punto a punto. Todavía, es bastante común utilizar un esquema predefinido de comunicación basado en el mecanismo maestro/esclavo. Este esquema emplea un movimiento simplificado de mensajes del tipo I/O muy común en aplicaciones de control. La ventaja de este método está en los requisitos necesarios para rodarlo, en general menores si comparados al UCMM. Hasta mismo dispositivos simples con recursos limitados (memoria, procesador de 8 bits) son capaces de ejecutar el protocolo. 5.9 ESTADOS DEL MÓDULO DEVICENET DeviceNet define dos estados, un para el módulo de comunicación (MS) y otro para la red (NS). El led MS indica las condiciones del módulo en si. O sea, si elle está o no apto a funcionar. La tabla abajo presenta los estados posibles: Tabla 5.2: Estados del módulo DeviceNet. Estado Apagado Descripción Sin alimentación Sólido verde Módulo operacional y en condiciones normales Parpadeando verde/rojo Equipo realizando autoteste. Ocurre durante la inicialización. 5.10 ESTADOS DE LA RED DEVICENET El led NS suministra informaciones de los estados de la propia red DeviceNet. La tabla que sigue presenta una breve descripción de estos estados. Tabla 5.3: Estados de la red DeviceNet. Estado Apagado Parpadeando verde Sólido verde Parpadeando rojo Sólido rojo Parpadeando verde/rojo Descripción Sin alimentación o no online. Comunicación no puede ser establecida. Dispositivo online, más no conectado. Esclavo completó con suceso el procedimiento de verificación del MacID. Eso significa que la tasa de comunicación configurada está correcta (o fue detectada correctamente en el caso de la utilización del auto-baud) y que no ha otros nudos en la red con la misma dirección. Pero, en esta etapa, todavía no ha comunicación con el maestro. Dispositivo operacional y en condiciones normales. Maestro aloco un conjunto de conexiones del tipo I/O con el esclavo. En esta etapa ocurre efectivamente el intercambio de datos a través de conexiones del tipo I/O Una o más conexiones del tipo I/O caducaran. Indica que el esclavo no puede entrar en la red debido a problemas de dirección o entonces debido a la ocurrencia de busoff. Verifique si la dirección configurada ya no está siendo utilizada por otro equipo, si la tasa de comunicación elegida está correcta o si existen problemas en la instalación. Equipo realizando autoteste. Ocurre durante la inicialización. SSW7000 | 36 Protocolo Profibus DP-V1 6 PROTOCOLO PROFIBUS DP-V1 6.1 INTRODUCCIÓN Profibus es un sistema de comunicación digital abierto mucho utilizado en la automatización de procesos y manufactura. Creado en la Alemania en el fin de la década de 80, es una de las redes de campo más utilizada en la industria. Es independiente del fabricante y su estandarización es garantizada por normativas y controlada por el Profibus International (PI) y por las organizaciones nacionales de cada un de los países miembros. Pode ser usado tanto en aplicaciones con transmisión de datos en alta velocidad cuanto en tareas complejas de automatización. Dispone, así, de diferentes perfiles de comunicación (DP y FMS). Ofrece también diferentes perfiles de aplicación para dispositivos de automatización de procesos, tales como transmisores y válvulas, bien como perfiles para drives. Una red Profibus puede contener hasta 126 estaciones en un bus de comunicación, dirección de 1 a 126, entre maestros y esclavos. En las secciones siguientes serán presentadas solamente las características del perfil DP. 6.2 CARACTERÍSTICAS BÁSICAS Profibus DP es el perfil más frecuentemente utilizado. Optimizado para alta velocidad y bajo coste, fue proyectado especialmente para la comunicación entre sistemas de control de automatización y dispositivos de I/O distribuidos. Figura 6.1: Red Profibus DP multimaestro. Profibus diferencia sus dispositivos entre maestros y esclavos (figura arriba). Maestros determinan la comunicación de datos en el bus. Un maestro puede enviar mensajes, sin cualquier requisición externa, siempre que poseer permiso para acceder al bus (token). Son también llamados de estaciones activas. Esclavos son dispositivos remotos tales como módulos de I/O, transductores, válvulas, drives, etc.. Estos no poseen permiso para acceder al bus y solo pueden enviar mensajes al maestro cuando solicitados. Son también llamados de estaciones pasivas. El Profibus DP es también un sistema multimaestro. O sea, en el mismo bus pueden existir varias estaciones activas controlando esclavos diferentes. En este caso, un telegrama especial llamado de token es pasado entre los maestros de la red para garantizar el permiso de acceso único al bus. Así, el acceso al bus Profibus incluí el procedimiento de pasaje de token entre las estaciones activas y el procedimiento maestro-esclavo para comunicación de los maestros con los esclavos. 6.3 ARQUITECTURA DEL PROTOCOLO SSW7000 | 37 Protocolo Profibus DP-V1 Profibus es basado en padrones internacionales, siendo su arquitectura de protocolo orientada al modelo de camada OSI (Open Systems Interconnection) de la ISO. En este modelo, la camada 1 (nivel físico) define las características físicas de transmisión. La camada 2 (data link layer) define el protocolo de acceso al medio. Y la camada 7 (application layer) define las funciones de aplicación. Figura 6.2: Camadas del protocolo Profibus Profibus DP usa solamente las camadas 1, 2 y la interfaz con el usuario. 6.4 MEDIO DE TRANSMISIÓN El padrón RS485 es la tecnología de transmisión más utilizada en el Profibus DP. Su aplicación incluí todas las áreas en las cuales una alta tasa de transmisión aliada a una instalación simple y barata es necesaria. Así, un cable con un único par tranzado blindado es suficiente. Esta topología, del tipo bus lineal, permite adicionar y retirar nudos de la red en funcionamiento sin perjudicar las otras estaciones. Una otra opción además del par metálico es la fibra óptica. Puede ser utilizada en ambientes con alta interferencia electromagnética o entonces cuando se desea aumentar la longitud máxima de la red con tasas de comunicación elevadas. En este caso la topología resultante es la estrella o el anillo. En Profibus, cada seguimiento de red puede contener hasta 32 estaciones. El uso de repetidores (máximo de 4) permite que hasta 126 estaciones se encuentren presentes en una única red. Para evitar reflexiones de la señal en la línea, la especificación del protocolo recomienda la instalación de resistores de terminación en las extremidades del tronco principal de la red. La falta de estos puede provocar errores intermitentes en los nudos. SSW7000 | 38 Protocolo Profibus DP-V1 La figura abajo presenta como se debe conectar el resistor de terminación. +5 V 390 Ohms Linha de dados RxD/TxD positivo 220 Ohms Linha de dados RxD/TxD negativo 390 Ohms GND Figura 6.3: Terminación de la red Profibus. 6.5 TASAS DE TRANSMISIÓN Y CONECTORES Profibus define que tasas de transmisión entre 9600bps y 12Mbps pueden ser seleccionadas. Esta configuración, única para toda la red, debe ser hecha en el maestro durante la inicialización del sistema. Esta tasa es función de la longitud máxima de cada seguimiento de la red. La tabla que sigue presenta el rango de valores permitidos. Tabla 6.1: Tasa de transmisión x Longitud de cada seguimiento 9.6; 19.2; 45.45; 93.75 Longitud de cada seguimiento (m) 1200 187.5 1000 500 1500 3000, 6000, 12000 400 200 100 Tasa de transmisión (kbps) Otro factor importante es la duración del ciclo de “scan” del maestro. La Figura 6.4 relaciona la tasa de comunicación con el número de estaciones en la red. De un modo general, para una determinada tasa, cuanto mayor es el número de nudos mayor será el tiempo necesario para consultarlos. Eso debe ser llevado en cuenta caso la aplicación tenga severas restricciones temporales. El conector estándar utilizado por el Profibus es el DB9 hembra. La Tabla 2.2 presenta las señales presentes en cada un de los terminales de esta interfaz. En la SSW se puede utilizar cualquier conector DB9 que cumpla la especificación del Profibus, excepto modelos en 90° debido a la mecánica del producto. SSW7000 | 39 Protocolo Profibus DP-V1 Figura 6.4: Tasa de comunicación x Número de esclavos. 6.6 ARCHIVO DE CONFIGURACIÓN Todo nudo Profibus DP posee un archivo de configuración asociado 13 . Este archivo contiene informaciones importantes a respecto del funcionamiento del dispositivo y debe ser registrado en el software de configuración de red 14 . 6.7 ESTADOS DEL MÓDULO DE COMUNICACIÓN El led ST indica las condiciones del módulo. O sea, si elle está o no en condiciones para funcionar. La tabla abajo presenta los estados posibles: Tabla 6.2: Estados del módulo Profibus DP-V1. 6.8 Estado Apagado Descripción Sin alimentación o no inicializado Sólido verde Módulo inicializado Parpadeando verde Inicializado, más en diagnóstico de eventos Rojo En error ESTADOS DEL MODO DE OPERACIÓN El led OP suministra informaciones del estado del modo de operación de la red. La tabla que sigue presenta una breve descripción de estos estados. Tabla 6.3: Estados del modo de operación. Estado Apagado Descripción Sin alimentación o no online Sólido verde Dispositivo online y con transferencia de datos Parpadeando verde Online más en el estado clear (salidas no son actualizadas). Parpadeando rojo (1 parpadeo) Error de parametrización Parpadeando rojo (2 parpadeos) Indica error en la configuración Profibus 13 Conocido por archivo GSD. El SSW con módulo de comunicación Profibus DP-V1 será reconocido por el software de configuración de la red como Anybus-CC Profibus DP-V1. 14 SSW7000 | 40 Protocolo EtherNet/IP 7 PROTOCOLO ETHERNET/IP 7.1 INTRODUCCIÓN En 2001 fue presentado EtherNet/IP, más un miembro de la familia de protocolos que utilizan el CIP (el mismo utilizado por el DeviceNet) en la camada de aplicación, conforme presentado en la figura abajo. CIP comprende una amplia suite de mensajes y servicios para una variedad de aplicaciones de automatización industrial, incluyendo control, seguridad, sincronización, configuración e información. Application Device Profiles & Application Objects Presentation Session Explicit Messaging Implicit Messaging Transport TCP/UDP Network Internet Protocol (IP) Data Link Ethernet Physical Peer-to-peer, multicast, unicast Common Industrial Protocol (CIP) TCP/IP Suite IEEE Standards Figura 7.1: Camadas del protocolo EtherNet/IP. Debido la fuerte integración existente entre la suite de protocolos TCP/IP y el Ethernet, el usuario tiene la posibilidad de integrar en una arquitectura única de comunicación, la red corporativa y la red de “suelo de fábrica”. El beneficio de esta integración se refleja en los costes involucrados, ya que esta es una tecnología probada y utilizada para conectar millones de computadores al rededor del mundo. EtherNet/IP ofrece, además de eso, otros beneficios: 7.2 Arquitectura productor-consumidor que permite, controlar, configurar y colectar datos simultáneamente de dispositivos inteligentes propagados por la red. Permite acomodar un grande número de dispositivos en la red. No existe restricciones cuanto al número de nudos conectados como generalmente ocurre con las redes de campo. Compatibilidad con protocolos estándar de la Internet, tales como http, ftp y dhcp. Compatibilidad con estándares IEEE Ethernet, permitiendo tasas de 10, 100 y hasta 1000Mbps. Arquitectura compatible con instalaciones Ethernet comerciales que incluyen, cobre, fibra y wireless. Opción de utilización de cables blindados y conectores robustos, tales como RJ45 IP67 y M12. CAMADA FÍSICA EtherNet/IP utiliza el estándar IEEE 802.3 en la camada física, lo mismo utilizado en redes de computadores. Este estándar especifica el medio físico, define el formato del frame de datos para transporte de los paquetes entre equipos y suministra un conjunto de reglas para determinar como los dispositivos de la red contestan cuando dos o más intentan acceder el canal simultáneamente. Este mecanismo es llamado de CSMA/CD (Carrier Sense Multiple Access/Collision Detection). EtherNet/IP es configurada usando una serie de equipos (hubs, switches, roteadores) que segmentan la red con el objetivo de aumentar el control y la seguridad de los datos. La topología típica utilizada es la estrella. En esta configuración, cables hacen la conexión punto a punto entre los elementos concentradores (hubs, switches, etc.) y los equipos industriales. Se recomienda que la longitud de este cable no sea superior a 90m. También se deben utilizar, de preferencia, cables Ethernet Cat5. Estos poseen mayor inmunidad a ruido. SSW7000 | 41 Protocolo EtherNet/IP Basado en los requisitos del proyecto se puede utilizar fibra óptica al envés de cables metálicos. Esta solución acostumbra ser adoptada cuando el ambiente es mucho ruidoso (alta interferencia electromagnética) o entonces cuando es necesario cubrir longitudes superiores a 100m. 7.3 CAMADA DE ENLACE DE DATOS La especificación IEEE 802.3 también es el estándar utilizado en la transmisión de los paquetes de datos entre dispositivos. Ethernet utiliza el CSMA/CD para garantizar el acceso único al canal de comunicación. Originalmente, Ethernet operaba en modo half-duplex, o sea, cada nudo podría solo enviar o recibir datos, más no simultáneamente. Retrasos y colisiones de paquetes ocurrían, más no eran preocupantes porque el tipo de tráfico no exigía respuestas en tiempo real. La creciente demanda por mayor desempeño y velocidad ha provocado la revisión de la especificación del protocolo que paso, entonces, a contar con el modo full-duplex. En este modo, existe un canal dedicado a la transmisión y otro para la recepción. Logo, full-duplex no utiliza el protocolo CSMA/CD para controlar el acceso al medio físico. Eso, sumado a las otras medidas elevaran el nivel de determinismo de la red al punto de ser utilizada en aplicaciones industriales para el control de procesos. IEEE 802.3 contiene también el protocolo MAC (Media Access Control), responsable por la “conversación” de los dispositivos en la red. Elle utiliza una dirección única formada de 6 bytes (llamado de “Dirección MAC”) para identificar los nudos en la red. El control de la unicidad de esta dirección es de responsabilidad de la IEEE y del fabricante del controlador Ethernet. PRE SFD DA SA 7 1 6 6 Length/Type 4 Data Pad 46 - 1500 FCS 4 PRE = Preamble SFD = Start of Frame DA = Destination Address SA = Source Address FCS = Frame Check Sequence Figura 7.2: Estructura de un frame Ethernet. La Figura 7.2 presenta la estructura de un frame Ethernet. Los principales campos de este frame son las direcciones de origen y destino (SA y DA respectivamente) y el campo de datos. El campo de datos del frame contiene efectivamente los datos que serán transportados, y podrá contener hasta 1500 bytes. La combinación de control en tiempo real con alta capacidad de transporte de datos tornan el EtherNet/IP una solución cada vez más atractiva. 7.4 CAMADA DE RED Y TRANSPORTE En las camadas de red y transporte, EtherNet/IP utiliza el estándar de la Internet, la suite de protocolos TCP/IP. El Transmission Control Protocol/Internet Protocol es el responsable por el envío de mensajes entre dispositivos. TCP/IP suministra los recursos necesarios para implementar una red totalmente funcional, eso es, mecanismo de direccionamiento, establecimiento de conexión e intercambio de datos. La suite de protocolos TCP/IP es formada por: TCP: protocolo orientado a la conexión, unicast, que suministra control de flujo de datos, fragmentación y mensajes de reconocimiento. Nodos deben interpretar cada mensaje, ejecutar la requisición y enviar una respuesta. Es ideal para las transmisiones confiables de gran cantidad de daros. EtherNet/IP utiliza TCP para encapsular mensajes explicitas CIP, utilizadas generalmente para configuración y diagnóstico. SSW7000 | 42 Protocolo EtherNet/IP IP: protocolo utilizado en la rotación de paquetes, posee la habilidad de enviar mensajes a los destinatarios mismo cuando existen rutas rotas. Todo equipo en una rede Ethernet es identificado por una dirección IP única, ejemplo 192.168.0.2. Para los mensajes de control críticos (tiempo real), EtherNet/IP utiliza UDP sobre IP. Mensajes implícitos (I/O) utilizan esta forma de transferencia de datos, pues el significado de los datos es predefinido en el momento que la conexión es establecida, minimizando el tiempo de procesamiento durante la ejecución. 7.5 ARCHIVO DE CONFIGURACIÓN A ejemplo del que ocurre con las redes presentadas anteriormente, EtherNet/IP utiliza un archivo de configuración (también llamado de archivo EDS) para describir las principales características funcionales del equipo. Debe ser registrado en el software de configuración de la red, exactamente como es hecho en DeviceNet. Consulte la documentación del PLC utilizado para más detalles. 7.6 ESTADOS DEL MÓDULO ETHERNET/IP EtherNet/IP define dos estados, un para el módulo de comunicación (MS) y otro para la rede (NS). El led MS indica las condiciones del módulo en si. La Tabla 7.1 presenta los estados posibles: Tabla 7.1: Estados del modo de operación. Estado Descripción Apagado Sin alimentación. Verde Módulo controlado por un scanner en modo RUN. Parpadeando verde No configurado o scanner en modo IDLE. Rojo Falla grave. Equipo debe ser reinicializado. Parpadeando rojo Falla recuperable. El retorno al estado normal ocurre automáticamente luego de solucionado la causa de la Falla. Equipo realizando autoteste. Ocurre durante la inicialización. Parpadeando verde/rojo 7.7 ESTADOS DE LA RED ETHERNET/IP El led NS indica las condiciones de la red EtherNet/IP. Tabla 7.2: Estado de la red EtherNet/IP. Estado Sin alimentación. Verde Módulo controlado por un scanner en modo RUN. Parpadeando verde No configurado o scanner en modo IDLE. Rojo Falla grave. Equipo debe ser reinicializado para salir de este estado. Falla recuperable. Equipo realizando autoteste. Ocurre durante la inicialización. Parpadeando rojo Parpadeando verde/rojo 7.8 Descripción Apagado ESTADO DEL LINK/CONEXIÓN El led LINK indica el estado de la conexión física de la red, bien como la actividad en el bus. Tabla 7.3: Estado de la conexión. Estado Apagado Descripción Sin conexión, sin actividad. Verde Conexión establecida. Parpadeando verde Actividad en el bus. Indica efectivamente que existe intercambio de datos entre el maestro y el esclavo. SSW7000 | 43 Fallas y Alarmas Relacionados con la Comunicación Anybus-CC 8 FALLAS Y ALARMAS RELACIONADOS CON LA COMUNICACIÓN ANYBUS-CC A129/F229 – MÓDULO ANYBUS-CC OFFLINE Descripción: Señaliza interrupción en la comunicación Anybus-CC. Módulo de comunicación fue para el estado offline. Actuación: Actúa cuando por algún motivo ocurre una interrupción en la comunicación entre el SSW y el maestro de la red. En este caso será señalizado en la HMI el mensaje de alarma A129 – a falla F229, dependiendo de la programación hecha en el parámetro P0313. Para alarmas, esta señalización desaparecerá automáticamente en el momento en que la condición que causó el error también deja de existir. Ocurre solamente luego que el SSW estar online. Corrección: Verifique cables y conectores. Un mal contacto en estos puede provocar fallas intermitentes. Certifíquese de que el PLC está en modo de ejecución (RUN). A130/F230 – ERROR DE ACCESO AL MÓDULO ANYBUS-CC Descripción: Señaliza error de acceso al módulo de comunicación Anybus-CC. Actuación: Actúa cuando la tarjeta de control no consigue leer las informaciones del módulo o cuando ocurrir incompatibilidad de hardware. En este caso será señalizado en la HMI el mensaje de alarma A130 – a falla F230, dependiendo de la programación hecha en el parámetro P0313. Es necesario desenergizar y energizar nuevamente el SSW para que un nuevo intento de acceso a la tarjeta Anybus-CC sea hecho. Corrección: Verificar si el módulo Anybus-CC está correctamente encajado en el conector XC44. Certificarse de que no existen dos opcionales (tarjeta WEG y módulo Anybus-CC pasivo) simultáneamente instalados conteniendo la misma interfaz (RS232 o RS485). En este caso la tarjeta opcional WEG tendrá preferencia sobre el módulo Anybus-CC, que permanecerá deshabilitado indicando A130. SSW7000 | 44 WEG Equipamentos Elétricos S.A. Jaraguá do Sul - SC – Brasil Teléfono 55 (47) 3276-4000 - Fax 55 (47) 3276-4020 São Paulo - SP – Brasil Teléfono 55 (11) 5053-2300 - Fax 55 (11) 5052-4212 [email protected] www.weg.net

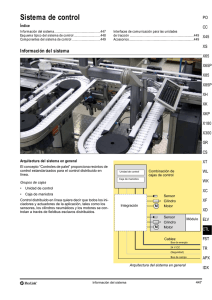
![[características técnicas ionlt-lt2]](http://s2.studylib.es/store/data/002267418_1-4298082abc278e9b2ce5a6b9cfeca975-300x300.png)