Los modelos de las plantas, en la práctica, suelen superar a
Anuncio

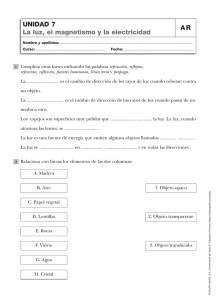
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD ESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA 243005 – SISTEMAS DINÁMICOS REDUCCIÓN DE SISTEMAS Los modelos de las plantas, en la práctica, suelen superar a los sistemas de segundo orden. Sin embargo, la influencia de los polos de la cadena cerrada no son todos de igual importancia. Aquellos que están más cerca del semiplano positivo son más lentos en su evolución temporal que otros orientados hacia el -∞ del semiplano negativo. A los polos más próximos al semiplano positivo se les llama dominantes y a los otros polos insignificantes. Figura 1 Determinación de los polos dominantes La regla práctica de clasificación de unos sobre otros depende de si el polo dominante es complejo conjugado o de primer orden. Si es complejo conjugado, debe de haber una distancia sobre el eje real de 5 a 10 veces el valor de la constante de amortiguamiento, entre el polo dominante y el resto de los polos. Para los polos dominantes de primer orden, el valor de la constante del polo dominante debe de ser al menos 5 a 10 veces mayor que el de los polos insignificantes. La reducción del orden del sistema simplifica tanto la fase de análisis como de diseño. En la práctica, se emplean las características dinámicas de los sistemas de primer o de segundo orden para definir los requisitos de diseño, aunque el sistema sea de mayor orden. Desde luego no tiene sentido hablar del coeficiente de amortiguamiento o de la frecuencia natural de un sistema si es de tercer, cuarto o de orden superior. El comportamiento de los sistemas de orden elevado puede aproximarse por otro equivalente de segundo o primer orden. La respuesta del equivalente no es Página 1 de 3 UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD ESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA 243005 – SISTEMAS DINÁMICOS idéntica, no tiene tantos matices, pero se aproximan y se hace factible aplicar reglas sencillas tanto para la predicción de su comportamiento como para el diseño. Hay dos formas de reducir el orden de un sistema: 1. Por aplicación de la teoría de polos dominantes. Los polos ubicados en la región de insignificantes pueden ser eliminados. 2. Mediante la cancelación entre el efecto de un polo y un cero próximo entre sí. Una vez reducido el grado del polinomio característico se ajustará la ganancia estática para que el comportamiento en el régimen permanente sea idéntico. Esta condición requiere que las ganancias estáticas sean idénticas, tanto la del reducido como la del modelo de la planta: lim G (s) lim Geq ( s) s 0 s 0 Ejemplo 1 Reducir el siguiente sistema: G( s) 3(s 5) s 2s 5 (s 3) 2 Solución: En este caso, la planta está constituida por un par de polos complejos conjugados, s1,2 1 j 2 y por un polo de primer orden, s3 3 . No están separados a una distancia de 5 veces la constante de amortiguamiento del polo dominante. Sin embargo, el efecto del polo de primer orden y del cero se puede cancelar. Si se hace la reducción, habrá diferencias entre la respuesta de la planta y la de su equivalente, debido a la discrepancia de constantes de tiempo entre el polo y el cero a cancelar. El equivalente reducido estará determinado por el polo complejo conjugado y por una ganancia k * que mantenga la misma ganancia estática que la planta: Geq ( s) 3k * 3k * (3)(5) 5 Geq (0) G (0) 1 Geq ( s) 2 s 2s 5 5 (5)(3) s 2s 5 2 Página 2 de 3 UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD ESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA 243005 – SISTEMAS DINÁMICOS Ejemplo 2 Reducir el siguiente sistema: G( s) 30(s 1) ( s 0.1) s 2 20 s 15 Solución: Se trata de un sistema de tercer orden. Al descomponer la función de transferencia en polos y ceros, se observa que el efecto del cero se puede compensar con el polo de constante de tiempo 1/0.78s: G( s) 30( s 1) 30( s 1) 2 (s 0.1) s 20s 15 (s 0.1)(s 19.22)( s 0.78) El resultado de esta reducción puede ser simplificado al analizar la ubicación del polo –19.22 respecto de –0.1. Hay suficiente distancia como para aplicar el concepto de polo dominante. Igualando las ganancias estáticas se tendrá el equivalente reducido: Geq ( s) k k (30)(1) 2 Geq (0) G (0) 20 Geq ( s) s 0.1 0.1 (0.1)(19.22)(0.78) s 0.1 REFERENCIAS BIBLIOGRÁFICAS A continuación se presenta el listado de las referencias bibliográficas requeridas: Golnaraghi, F. & Kuo, B. (2010). Time domain analysis of control systems. En: Automatic control systems (9a.ed.). (pp. 253-336). Estados Unidos: John Wiley & Sons. Ogata, K. (2010). Análisis y diseño de sistemas de control por el método del lugar de las raíces. En: Ingeniería de control moderna (5a. ed.). (pp. 269-397). Madrid, España: Pearson Education. Nise, N. (2011). Time response. En: Control Systems Engineering (6a ed.). (pp. 161-234). Estados Unidos: John Wiley & Sons. A continuación se presenta el listado de las referencias bibliográficas complementarias: Curso virtual de análisis de sistemas dinámicos. Recuperado en http://www.virtual.unal.edu.co/cursos/ingenieria/2001619/index.html Design and analyze control systems. Recuperado en http://www.mathworks.com/help/control/index.html Teoría de control básica. Recuperado en http://controltheory.org/index_spa.html Página 3 de 3