Tecnología TOF (Time of flight)
Sensores CMOS para obtención
de imágenes 3D en tiempo real
XXXI Jornadas de Automática industrial 2010
Universidad de Jaén, Septiembre 2010
Infaimon.com
INFAIMON Su
S Asesor en Visión Artificial
INFAIMON inició su andadura en 1994 con el objetivo de dedicarse de
forma exclusiva al mercado de la visión y ofrecer un servicio de máxima
calidad a sus clientes.
Disponemos de oficinas en
España, Portugal y México.
En la actualidad
actualidad, estamos
extendiendo nuestra labor a
otros países de iberoamérica.
2
M cho más q
Mucho
que
e una
na compañía de distrib
distribución
ción
En INFAIMON no solo comercializamos sistemas y componentes
p
de
visión artificial y análisis de imagen, ofrecemos servicios que permiten
a nuestros clientes aumentar sus conocimientos y asegurar la viabilidad
de sus aplicaciones
aplicaciones.
3
INFAIMON Su
S Asesor en Visión Artificial
Nuestro asesoramiento está enfocado a proporcionar los conocimientos
necesarios para la correcta elección del producto y su utilización de la
manera más eficiente, consiguiendo así su óptimo rendimiento.
4
Tecnologías 3D
Stereo Vision
Triangulación
Láser
Precisión
+
(Si el contraste es
ó ti )
óptimo)
Velocidad
-
--
Tamaño
-
-
Coste
+
--
Handicaps
Depende de la base
Depende de la
superficie
Movimiento
Coste
++
Tecnologías 3D (2010)
Stereo Vision
Triangulación
Láser
3D TOF
Precisión
+
(Si el contraste es
óptimo)
ópt
o)
Velocidad
-
--
++
Tamaño
-
-
++
Coste
+
--
++
Handicaps
*Depende de la base
Depende de la
superficie
Movimiento
Coste
Precisión
++
~ →+
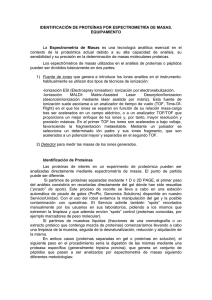
Introducción a la tecnología
g TOF (sistema
(
tipo)
p )
3. Each pixel of the TOF image
3
Each pixel of the TOF image
sensor measures time
that light needs to travel
between camera and scene
1. Infrared light source
inside the TOF camera
illuminates the scene
∼
USB/ETH
interface
5. Point cloud data is
transferred to PC
for image processing
modulated light
4. TOF camera calculates 4
TOF camera calculates
distance to scene
for each pixel
reflected wave
2. Reflected light is detected
2
Reflected light is detected
on TOF image sensor
modulated light
scene
Integración 3D-TOF
3D TOF (Pulse Modulation)
Integración 3D-TOF
3D TOF (Phase
(Phase-Measurement
Measurement modulation)
Integración 3D
3D-TOF
TOF (Phase-Measurement
(Phase Measurement modulation)
Integración 3D
3D-TOF
TOF (Phase-Measurement
(Phase Measurement modulation)
A=
B=
c (τ 0 ) + c (τ 1 ) + c (τ 2 ) + c (τ 3 )
4
[C (τ 3 ) − C (τ 1 ) ]2 + [C (τ 0 ) − C (τ 2 ) ]2
2
b/w image
⎛ c((τ 3 ) − c((τ 1 ) ⎞
⎟⎟
ϕ = atan ⎜⎜
⎝ c(τ 0 ) − c(τ 2 ) ⎠
Distance
Resolución y repetitibilidad en la medida de distancias (Z)
Dos aspectos a tener en cuenta:
•
Precisión en la medida: < 1cm para un sistema standard
•
Repetitibilidad (ruido): <1.5mm
Resolución y repetitibilidad en la medida de distancias (Z)
•F = Frecuencia de modulación
•A = Amplitud de luz modulada
•B
B = Iluminación externa
1
σ ∝
F
σ ∝
B+ A
A
Ejemplo
j p industrial de cámara TOF:
3D point cloud
(x,y,z)
LED
Illumination
2D image
(grayscale)
AD
Converter
Interface
Image
Sensor
LED
Illumination
Digital
Signal
Processing
confidence
map
USB/
Ethernet
12V DC, 0.9A
trigger
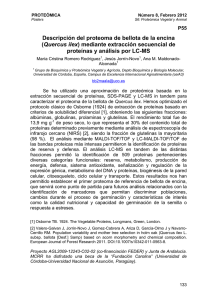
Ejemplo
j p industrial de cámara TOF:
• 176 x 144 Pixel
• Data format: x,y,z
• Real-time image acquisition
• Interface: USB / Ethernet
• Down to millimeter accuracy
• Industrial-grade housing
• Distance range: 0.3 – 5/10 m
• 65 x 65 x 68 mm3
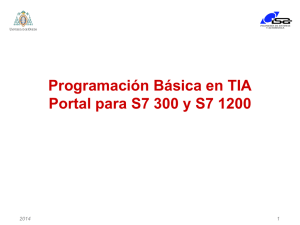
Mapa
p de profundidad
p
Pseudo-Imagen
g
‘Confidence Map’
p
¿Utilización de múltiples cámaras?
¾ Cuando mas de una cámara opera con la misma frecuencia de
modulación, la luz interfiere en la imagen.
¾ Para eliminar este problema se pueden seleccionar ‘n’
frecuencias de modulación (10, 14.5, 15, 15.5, 29, 30 …MHz.)
Aplicaciones.
Logística
•
•
Mediciones de Volumen
Robots Móviles
Aplicaciones.
Seguridad Agricultura/Ganadería,
Seguridad,
Agricultura/Ganadería interfaz Hombre-Máquina
Hombre Máquina
• Control de accesos
• Control de objetos
• Seguridad de altas prestaciones
• Robots recolectores
• SOA
• Control de cultivos
• Computer Games
• Realidad Virtual
• Anuncios
A
i interactivos
i t
ti
/ Marketing
M k ti
Conclusiones 2010
• Mayor precisión en Z / Mayor frecuencia de modulación
• Mayor
y Frame Rate / mayor
y sensibilidad en sensor
• Mejoras de la supresión de ‘pixel background light’ para
aplicaciones en el exterior
• Incrementar la resolución en sensor
• Reducción de costes
¿Seguro que podemos creer todo lo que vemos en 2D?
Ruegos
g y Preguntas
g
Gracias por su atención!
Toni Ruiz
[email protected]
22
ESPAÑA
Barcelona
PORTUGAL
Vergós, 55
Vergós
08017 Barcelona
Tel 93 252 5757
[email protected]
Rua de Viseu, 43
3800 280 Aveiro
3800-280
Portugal
Tel. 234 312 034
[email protected]
Madrid
MÉXICO
Ribera del Loira, 46
28042 Madrid
Tel. 902 463 246
infaimon@infaimon com
[email protected]
Hacienda Chintepec, 110.Col. El Jacal
76180 Querétaro, Qro.
Tel. (442) 215 14 15
infaimon mx@infaimon com
[email protected]
infaimon.com
 0
0