tensión
Anuncio

CAPÍTULO 1
TENSIÓN
Hoy trataremos algún aspecto del diseño
de una vasija o depósito de pared delgada
(t/r<10) sometida a presión interna
t
r
t
r
Vasija esférica
Vasija cilíndrica
¿Qué conceptos necesitamos manejar?
Básicamente dos: el de tensión y el de resistencia a tracción
CONCEPTO DE VECTOR TENSIÓN
F2
F1
F1
∑F = 0
F3
∑M = 0
π
∆S
n
∆f
S
F3
r
r
r
∆f
df
=
σ = lim
dS
∆s → 0 ∆S
Unidades: N/m2=Pa
Como en la práctica 1 Pa es de pequeña
magnitud, utilizaremos, en general, MPa
COMPONENTES INTRÍNSECAS DEL VECTOR TENSIÓN
σn
τ
df
σ n = tensión normal = lim
∆s → 0
τ = tensión tangencial = lim
∆s → 0
σ n2 + τ 2 = σ 2
r
r
proy ∆f sobre n
∆s
r
proy ∆f sobre π
∆s
Tensiones en una barra sometida a una carga de tracción
P
P
G
Demos un corte a la barra por una sección que forma un ángulo
θ con el plano vertical
A
P
θ
Area= A/cosθ
La resultante de la distribución de tensiones debe ser horizontal
y pasar por el c.d.g. de la sección transversal de la barra
En realidad, las fuerzas N y V serán las resultantes de una distribución de
tensiones, las cuales las supondremos uniformes sobre la sección de corte
y
A
P
θ
x
Area= A/cosθ
∑F
Planteando el equilibrio:
x
− P + N cosθ + V cos(90 − θ ) = 0
N
P
=0
θ
V
or
− P + N cosθ + V sin θ = 0
∑F
y
=0
N sin θ − V sin (90 − θ ) = 0
or
N sin θ − V cosθ = 0
Por tanto:
N
P
θ
V
N = P cosθ
V = P sin θ
Área de la sección de corte: Area =
Como, por definición, la
tensión es fuerza dividida
por área:
A
cos θ
σ
P
P
P
2
(1 + cos 2θ )
σ = cos θ =
A
2A
P
P
τ = sin θ cos θ =
sin 2θ
A
2A
θ
τ
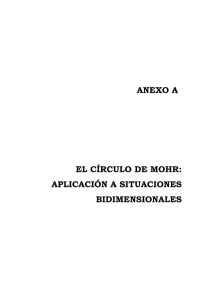
σ es máxima cuando θ es 0° ó 180°
τ es máxima cuando θ es 45° ó 135°
Stress/(P/A)
Tensión
(/σ0)
1
σ
τ
0.5
P
σ max
0 =
A
τ max
1
= σ max
2
0
0
10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180
-0.5
-1
Ángulo
Angle θ
σ max
τ max
P
=
A
P
=
2A
El signo de la tensión tangencial τ cambia cuando el ángulo
θ es mayor de 90°
Nótese que: τ (θ )= -τ (90 ° +θ )
P
θ
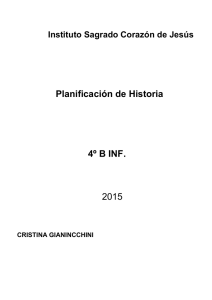
VASIJAS ESFÉRICAS A PRESIÓN
t
r
r
Fuerza ejercida por
la presión interna:
πr p
2
Fuerza ejercida por
la tensión actuante:
2π rtσ
σ
p
σ
De la igualdad entre
ambas, resulta:
pr
σ =
2t
Estado tensional en un punto de la vasija
σ
Punto
elástico
σ
σ
σ
¡ σ es mucho mayor que p !
pr
σ =
2t
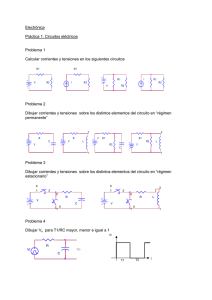
VASIJAS CILINDRICAS A PRESIÓN
ció
c
e
r
Di
ng
o
l
n
nal
i
d
itu
Dirección circunferencial
σh
Punto elástico
σa
r
t
σa
σh
Cálculo de la tensión longitudinal:
Punto elástico
πr p
2
r
t
Fuerza ejercida por
la tensión actuante:
2π rtσ a
σa
p
σa
Fuerza ejercida por
la presión interna:
De la igualdad entre
ambas, resulta:
pr
σa =
2t
Cálculo de la tensión circunferencial:
Fuerza ejercida por
la presión interna:
r
2rlp
t
l
l
σh
Fuerza ejercida por
la tensión actuante:
2ltσ h
De la igualdad entre
ambas, resulta:
p
σh
pr
σh =
t
Estado tensional en los puntos de la vasija cilíndrica:
pr
σh =
t
pr
σa =
2t
¡ σh es mayor que σa, y ambas son mucho mayores que p !
Forma de rotura más
probable
a
a
σh=2σa
Ejemplo: Determinar el espesor t de la vasija de la figura, realizada
con acero inoxidable austenítico, sabiendo que su radio es r y que
contiene un gas a una presión p. Considérese un coeficiente de seguridad γ.
Tensión máxima:
σ máx
pr
=
t
¿Y la resistencia a tracción del material?
σ
σ
Hormigón
Acero
σu
σy
Tensión
Tensión
σu
ε
ε
εy
Deformación
Volveremos a ello en el capítulo 3
Deformación
COEFICIENTE DE SEGURIDAD
Los elementos estructurales, o
los componentes de máquinas
deben ser diseñados de
manera tal que las tensiones
que se producen en su seno
sean
menores
que
la
resistencia del material.
γ
γ
= Coeficiente de seguridad
σR
resistencia
=
=
σ adm tensión admisible
Lógicamente el factor de seguridad
debe ser una cantidad mayor que la
unidad
El factor de seguridad tiene en
cuenta, principalmente:
•Las incertidumbres de los valores
de las propiedades del material
•La incertidunbre del valor de las
cargas actuantes
•La incertidumbre del análisis
•El comportamiento a largo plazo del
elemento estructural
•La importancia del elemento
considerado en la integridad de la
estructura de la que forma parte
En vasijas a presión, γ suele oscilar entre 4 y 8
σ máx
σR
pr
=
≤ σ adm =
t
γ
t≥
prγ
σR
PERO, EN LA REALIDAD, NOS ENCONTRAREMOS
CON ESTRUCTURAS DE MAYOR COMPLEJIDAD,
TANTO DE FORMA COMO DE ESTADO TENSIONAL
TENSOR DE TENSIONES
z
σz
z
σ
P
P
τzx
y
y
x
x
τyz
z
σ’
P
z
σ’’
σy
τyx
P
τxy
σx
y
y
x
τxz
x
τzy
PUNTO ELÁSTICO TRIDIMENSIONAL
σz
dy
τzy
τzx
z
P
τxz
0
τzx
y
dx
τzy
x
dy
σz
dz
σy
τyx
τxy
σx
τyz
σz
dy
τzy
τzx
z
P
τxz
dx
τzy
x
dy
∑F
∑F
∑F
σy
τzx
y
0
σz
x
= 0 ⇒ tensiones σ x iguales y opuestas en las caras ⊥ eje x
y
= 0 ⇒ tensiones σ y iguales y opuestas en las caras ⊥ eje y
z
= 0 ⇒ tensiones σ z iguales y opuestas en las caras ⊥ eje z
∑M
∑M
∑M
dz
τyx
τxy
σx
τyz
x
=0
τ yz dxdz ⋅ dy − τ zy dxdy ⋅ dz = 0 ⇒
τ yz = τ zy
y
=0
τ zx dxdy ⋅ dz − τ xz dydz ⋅ dx = 0 ⇒
τ zx = τ xz
z
=0
τ xy dydz ⋅ dx − τ yx dxdz ⋅ dy = 0 ⇒
τ xy = τ yx
La igualdad entre las tensiones tangenciales,
actuando sobre planos ortogonales entre sí,
puede demostrarse, por ejemplo, estableciendo
el equilibrio de un pequeño paralelepípedo de
espesor dz. Apliquemos la fuerza Vx:
y
Vx=τyxdxdz
dy
x
dx
El equilibrio requiere que,
Este par debe estar equilibrado por
sobre la cara inferior, actúe
otro (antihorario) consecuencia de
una fuerza igual y de signo
contrario, lo que producirá
dos fuerzas verticales
Vy actuando
sobre las caras verticales:
un par:
y
y
Vx=τyxdxdz
Vx=τyxdxdz
Vy=τxydydz
dy
Vx=τyxdxdz
Mz=Vxdy=τyxdxdydz
x
x
y
Utilizando:
Vx=τyxdxdz
∑M
z
=0
obtenemos:
Vy=τxydydz
dy
τ yx (dxdz )dy = τ xy (dydz )dx
τ yx = τ xy
dx
x
Conclusión:
Si sobre un plano en las proximidades de un punto, existe
una tensión tangencial, sobre un plano ortogonal al anterior
debe existir una tensión tangencial del mismo valor.
Teniendo en cuenta que, sobre cada una de las caras
del paralelepípedo infinitesimal considerado (punto elástico),
actúan tres componentes del vector tensión correspondiente,
se obtendrían, en total, 18 valores de los que sólo hay
6 valores diferentes entre sí, a saber:
σ x , σ y , σ z , τ yz , τzx , τ xy
En un sólido, estas componentes, serán funciones continuas
de las coordenadas cartesianas del punto x,y,z.
σ x = σ x (x, y, z ), τ xy = τ xy (x, y, z ) .......
TENSIONES ACTUANDO EN UN PLANO CUALQUIERA
z
u=li+mj+nk
C
σx
σ∗z
τxy
τyx
σy
τyz
π
A
x
P
σ∗x
τxz
σ∗y
τzx
τzy
σz
B
y
r
r
r
σ = σ *x i + σ *y j + σ *z k
r*
Eje x : σ x∗ dΩ = σ x l dΩ + τ xy m dΩ + τ zx n dΩ
Eje y : σ ∗y dΩ = τ xy l dΩ + σ y m dΩ + τ yz n dΩ
Eje z : σ z∗ dΩ = τ zx l dΩ + τ yz m dΩ + σ z n dΩ
Augustin-Louis CAUCHY
(1789-1857)
⎛σ
⎜
σ
⎜
⎜
⎝{σ
∗
x
∗
y
∗
z
TENSOR DE TENSIONES
(o Tensor de Cauchy)
⎞ ⎛ σ x τxy τ zx ⎞ ⎛ l ⎞
⎟⎜ ⎟
⎟ ⎜
τ
σ
τ
=
m
⎜
⎟
xy
y
yz
⎟
⎟
⎜
⎟ ⎜
⎜ ⎟
⎟
⎠ ⎝ τ xz τ yz σz ⎠ ⎝{n ⎠
1442443 r
[σ*′ ]
[σ ]
r∗
[T ]
r
= [T ] [nu]
[nu]
FUERZAS INTERNAS POR UNIDAD DE VOLUMEN
z
r
r
dFint = fV ⋅ dV
dV
y
x
Fuerza interna, por
unidad de volumen
r
r
r
r
f v ( x , y , z ) = X ( x , y , z )i + Y ( x , y , z ) j + Z ( x , y , z )k
Ejemplo 1: sólido sometido a la acción de la gravedad según
el eje y
y
r
r
f v ( x , y , z ) = − ρ gj
x
z
X(x,y,z) y Z(x,y,z) serían nulas y la función Y(x,y,z)= - ρg
Ejemplo 2: sólido en movimiento (fuerzas de inercia)
(
r
r
r r
r
r
f v = − dm × a / dV = − ρ × a = − ρ &x&i + &y&j + &z&k
X ( x, y, z ) = − ρ &x&, Y ( x, y, z ) = − ρ &y&, Z ( x, y, z ) = − ρ &z&
)
ECUACIONES DE EQUILIBRIO INTERNO
σ′x = σ x +
τ′xy = τ xy +
τ′zx = τ zx
dx
∂σ x
dx
∂x
∂τ xy
∂x
∂τ zx
+
∂x
dx
dx
σz´
τzy
´
τzx
´
τyz
´
τyx
σy´
σy
τyx
´
τyz
τzx
τzy
σz
∂σ x ∂τ xy ∂τ zx
X+
+
+
=0
∂x
∂y
∂z
∂τ xy ∂σ y ∂τyz
Y+
+
+
=0
∂x
∂y
∂z
∂τzx ∂τ yz ∂σ z
Z+
+
+
=0
∂x
∂y
∂z
ECUACIONES DE EQUILIBRIO EN EL CONTORNO
FUERZA, POR UNIDAD DE SUPERFICIE, QUE
ACTÚA SOBRE EL CONTORNO
Sobre la superficie exterior del sólido (contorno) pueden, o no,
actuar tensiones que, directamente, se apliquen al sólido
z
r
r
dFcontorno = f Ω ⋅ dΩ
dΩ
y
x
Fuerza, por unidad
de superficie, en el
contorno
r
r
r
r
f Ω = X (x , y , z ) i + Y (x , y , z ) j + Z (x , y , z ) k
EJEMPLO:
y
σ
σ
P
P
Q
r
r
fΩ = σ j
Q
σ
x
r
r
fΩ = 0
Y, sin embargo, en los puntos muy próximos a la superficie del sólido
pueden existir tensiones internas.
En un punto P próximo al contorno del sólido, deberá existir equilibrio entre
las tensiones y las fuerzas, por unidad de superficie, aplicadas.
r
r
r r
u = li + mj + nrk
z
σy
τyx
τyz
x
P
τzy
τzx
τxy
σx
τzx
σz
Ecuaciones de equilibrio
en el contorno:
fΩ
X = σ x l + τ xy m + τ zx n
y
Contorno del
sólido
Y = τ xy l + σ y m + τ yz n
Z = τ zx l + τ yz m + σ z n
CAMBIO DEL SISTEMA DE REFERENCIA
[ T ] = tensor de tensiones en P referido al sistema x, y, z
[ T′] = tensor de tensiones en P referido al sistema x′, y′, z′
[R ] = matriz del cambio de ejes
r
[u] = componentes de un vector unitario respecto al sistema
r
u
[ ′] = componentes de un vertor unitario respecto al sistema
[T] = [R ][T′][R ]
[T′] = [R ] [T][R ]
T
T
x, y, z
x ′, y ′, z ′
CASO BIDIMENSIONAL:
y’
y
⎡ cos θ
[R] = ⎢
⎣sen θ
θ
x’
x
− sen θ ⎤
cos θ ⎥⎦
y
σy’
τx’y’
y’
σx’
x’
σy
τxy
σx
θ
x
⎡ σ x′ ⎤ ⎡ cos2 θ
⎢
⎥ ⎢
2
=
σ
sen
θ
⎢ y′ ⎥ ⎢
⎢τ x′y′ ⎥ ⎢− senθ cosθ
⎣
⎦ ⎣
sen 2θ
cos2 θ
senθ cosθ
2 senθ cosθ ⎤ ⎡σ x ⎤
⎥⎢ ⎥
− 2 senθ cosθ ⎥ ⎢σ y ⎥
cos2 θ − sen 2θ ⎥⎦ ⎢⎣τ xy ⎥⎦
TENSIONES Y DIRECCIONES PRINCIPALES
Sea un sólido sometido a un sistema de cargas, P un
punto cualquiera del sólido (punto genérico) y [T] el
correspondiente tensor de tensiones afecto a dicho punto.
¿existirá algún plano, que pase por las proximidades
(a distancia infinitesimal) del punto P, tal que el vector
tensión correspondiente, sea ortogonal a dicho plano
(es decir, que el vector tensión no tenga componente según
el plano o, lo que es lo mismo, que sobre dicho plano no
actúa ninguna tensión tangencial)?
df
σ
,
σ
n
df
,
u
τ=0
Vector tensión en una dirección cualquiera:
r
r
[σ′] = [ T ] [u]
Vector tensión en la dirección que buscamos:
r
[T - σ I] [u ] = [0]
r
r
[σ′] = σ [u]
r
r
r r
u = l i + mj + nk
(σ x − σ ) l + τ xy m + τ zx n = 0 ⎫
(
)
⎪
τ xy l + σ y − σ m + τ yz n = 0⎬
τ zx l + τ yz m + (σ z − σ ) n = 0⎪⎭
(σ x − σ ) l + τ xy m + τ zx n = 0 ⎫
(
)
⎪
τ xy l + σ y − σ m + τ yz n = 0⎬
τ zx l + τ yz m + (σ z − σ ) n = 0⎪⎭
Para que este sistema tenga solución distinta de la trivial:
σ x −σ
τ xy
τ zx
τ xy
σ y −σ
τ yz = 0
τ zx
τ yz
σ z −σ
Ecuación característica:
Invariantes:
I1 = σ x + σ y + σ z
σ 3 − I1 σ 2 + I 2 σ − I 3 = 0
I2 = σ x σ y + σ y σz + σ z σ x − τ2yz − τ2zx − τ2xy
I3 = T
Tensiones principales
σmin
σmax
σ max ≥ σ int ≥ σ min
σint
σint
σmin
σmax
σ1 ≥ σ 2 ≥ σ 3
Direcciones y tensiones principales:
Tensor de tensiones:
σ3
σ2
z
σ1
y
x
I1 = σx +σ y +σz
⎛ σ1
⎜0
⎜
⎝0
0
σ2
0
0⎞
0 ⎟⎟
σ3 ⎠
Invariantes:
Las tensiones tangenciales
sobre los planos principales
I1 = σ1 + σ 2 + σ 3
son nulas
I2 = σxσ y +σxσz +σ yσz −τ xy2 −τ xz2 −τ yz2
I3 = σxσ yσz + 2τ xyτ xzτ yz −σxτ yz2 −σ yτ xz2 −σzτ xy2
I 2 = σ1 σ 2 + σ 2 σ 3 + σ3 σ1
I 3 = σ1σ 2 σ 3
TENSIÓN HIDROSTATICA Y TENSIONES DESVIADORAS
σ hidrostatica = p =
⎛ σ x τ xy τ zx ⎞
⎟
⎜
⎜τ xy σ y τ yz ⎟ =
⎟
⎜
τ
τ
σ
zx
yz
z ⎠
⎝14
42443
tensor de tensiones
σ x +σ y +σ z
3
=
σ1 + σ 2 + σ 3
3
I1
=
3
⎛ σ ' x τ xy τ zx ⎞
⎛ p 0 0⎞
⎟
⎜
⎟
⎜
⎜ 0 p 0 ⎟ + ⎜ τ xy σ ' y τ yz ⎟
⎟
⎜
⎜ 0 0 p⎟
τ
τ
σ
'
zx
yz
z⎠
⎝14243⎠
⎝14
4
42444
3
comp. hidrostatica
comp. desviadora
σ 'x = σ x − p ; σ ' y = σ y − p ; σ 'z = σ z − p
Invariantes del tensor desviador: J 1 = 0
J2 = I2 −
J3
(
2I
=
3
1
I12
3
− 9 I1 I 2 + 27 I 3
27
)
ELIPSOIDE DE TENSIONES
σ1
σ1
σ1
A
σ2
σ2
+
=
P
P
σ1
σ1
σ2
σ2
σ2
P
P
n
σ∗∗
A
ESTADO II
Estado I:
σ∗
θ
σ1
ESTADO I
r
n
σ * = σ 1 cosθ
Estado II:
P
σ2
r
σ * * = σ 2 ⋅ senθ
P
σ∗ + σ∗∗
y
n
¿Cuál es el lugar geométrico del
extremo del vector tensión total,
correspondiente a dicho punto,
cuando variemos el ángulo θ ?
σ∗ + σ∗∗
x
P
Coordenadas del extremo del vector tensión:
x = σ 2 ⋅ sen θ
y = σ 1 ⋅ cos θ
x
2
σ2
+
y
2
σ1
=1
CASO TRIDIMENSIONAL:
⎛ x⎞ ⎛ σ 1 0
⎜ y⎟ = ⎜ 0 σ 2
⎜ ⎟ ⎜
⎝ z⎠ ⎝ 0 0
0⎞
0⎟
⎟
σ 3⎠
⎛ l⎞
x = σ1 l ⎪⎫
⎜ m⎟ → y = σ 2 m ⎬
⎜ ⎟
⎝ n⎠
z = σ3 n ⎪⎭
x2 y 2 z2
2 +
2 +
2 =1
σ1 σ 2 σ 3
σ2
σ3
σ1
I1=Suma de las longitudes
de los tres semiejes del elipsoide
I2 =proporcional a la suma de las
áreas de las tres elipses que
intercepta el elipsoide con los
planos principales
I3 =proporcional al volumen del
elipsoide
EL CIRCULO DE MOHR: APLICACION A SITUACIONES
BIDIMENSIONALES
Otto MOHR
(1835-1918)
-Tensiones normales: positivas si son de tracción
-(negativas si fueran de compresión)
- Tensiones tangenciales:
+
-
y
σy
τxy
σn
τ
σx
u
θ
θ
x
Signos a considerar para la construcción
del círculo de Mohr:
- La tensión normal será positiva
si es de tracción
- La tensión tangencial es positiva si,
desde el centro del punto elástico,
produjera un giro en sentido horario
σn >0 TRACCION
τ >0
τ
u
θ
⎛ σ ∗x ⎞ ⎛ σ x
⎜⎜ ∗ ⎟⎟ = ⎜⎜
⎝ σ y ⎠ ⎝ τ xy
y
τ xy ⎞ ⎛ cos θ ⎞
⎟⎟ ⎜
σ y ⎠ ⎝ senθ ⎠⎟
σy
τxy
σ n = σ x cos 2 θ + τ xy sen2θ + σ y sen 2θ
σn
τ
σx
u
θ
θ
x
σy
σx
τ=
sen2θ −
sen2θ − τ xy cos 2θ
2
2
⎡
σx + σy ⎤ σx − σy
cos 2θ + τ xy sen2θ
⎢σ n −
⎥=
2 ⎥⎦
2
⎢⎣
σx − σy
sen2θ − τ xy cos 2θ
τ=
2
que corresponden a la ecuación de una circunferencia
(en un plano cuyos ejes fueran σ y τ (Plano de Mohr)
de centro:
(σ x + σ y )/2
y radio:
1 (σ − σ )2 + τ 2
xy
4 x y
τ
Existe una correspondencia biunívoca entre cada dirección
que consideremos en el punto elástico en estudio y un
punto del círculo de Mohr correspondiente a ese punto
elástico: a cada dirección que pasa por las proximidades
del punto P le corresponde un punto del círculo de Mohr
cuya abcisa es la componente normal del vector tensión
que actúa sobre la dirección considerada y cuya ordenada
es la componente tangencial de dicho vector tensión
(σ
y
,τ xy )
σ2
(τ max )
Una vez dibujado el
círculo de Mohr, pueden
(τ max ) obtenerse, por ejemplo,
σ los valores de las tensiones
principales así como las
σ1
(σ , − τ ) direcciones sobre las
que actúan.
C
⎛σ x +σ y ⎞
⎜⎜
, 0 ⎟⎟
2
⎠
⎝
2θ
(σ
x
, − τ xy )
PASOS PARA EL DIBUJO DEL CÍRCULO DE MOHR
A
B
A
A
A
C
B
B
C
B
OBTENCIÓN DE LAS TENSIONES Y DIRECCIONES PRINCIPALES
σy
Dirección
y
principal 2 σ
2
σx
σx
τxy
σy
τ
ε
σ1
Plano
principal 2
x
σ x +σ y
Plano
principal 1
2
y
τxy
σ2
τmax
σ1
σ
τxy
x
σy
σx
Dirección
principal 1
PROPIEDADES CIRCULO DE MOHR:
Obtención del Polo del Círculo de Mohr:
τ
y
(σy,τxy)
POLO
σ
(σx,-τxy)
x
Otros aspectos del círculo de Mohr.
σ
σ
σ
A (σ,τ)
θ
θ
σ
τ
τ
C
A
B
τ
σ
Direcciones en las que el
ángulo del vector tensión
con la normal al plano sobre
el que actúa es máximo
¿A qué dirección representa el POLO del círculo de Mohr?
τ
(σy,τxy)
POLO
σ
(σx,-τxy)
SOFTWARE DISPONIBLE EN LA RED
http://www.tecgraf.puc-rio.br/etools/mohr/mohreng.html
http://www.eng.usf.edu/~kaw/software/
http://www.umoncton.ca/turk/CdeMohr.xls
TENSIONES TANGENCIALES MÁXIMAS
(Problemas bidimensionales)
τ
z
σΙΙΙ=0
y
σΙΙ
σΙΙ
x
σΙ
τ max =
σ
σΙ
τ
σΙ
τmax
σΙΙ
Dirección de σIII
τmax
σΙ
σΙΙΙ=0
σΙ
σ
τ max =
σI
2
τ
Dirección de σIII
τmax
σΙΙ
τ max
σΙΙ
σΙ
σΙΙΙ=0
σ
τ max =
⎛ σ I − σ II σ I σ II ⎞
= Máximo de ⎜
,
,
⎟
2
2
2
⎝
⎠
σ II
2
σ I − σ II
2
TENSIONES TANGENCIALES MÁXIMAS
(Problemas tridimensionales)
τ max
⎛ σ1 − σ 2 σ1 − σ 3 σ 2 − σ 3
= Máximo de ⎜⎜
,
,
2
2
2
⎝
⎞
⎟
⎟
⎠
Más, en la web, sobre círculo de Mohr:
http://www.engin.umich.edu/students/support/mepo/ELRC/me211/mohr.html