0204) Fuerzas de Roce
Anuncio
 Fuerzas de Roce")
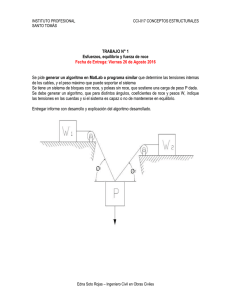
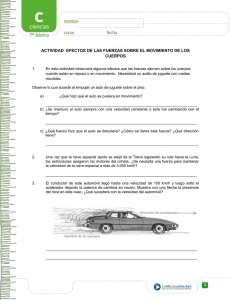
1 2 Física General I Paralelos 05 y 22. Profesor Rodrigo Vergara R Física General I Paralelos 05 y 22. Profesor Rodrigo Vergara R 0204) Fuerzas de Roce Existen dos tipos de roce: • Roce estático, asociado a un cuerpo en reposo (figura 3a) • Roce dinámico o cinético, asociado a un cuerpo en movimiento (figura 3b) A) Roce por contacto (a) Figura 1) Rugosidad en superficies de contacto que causan la existencia de fuerzas de roce Se denomina roce o fricción a aquella fuerza que aparece en la superficie de contacto de dos cuerpos diferentes en movimiento relativo. Siempre que la superficie de un cuerpo se desliza sobre la de otro, cada cuerpo ejerce una fuerza de roce sobre el otro, siendo dichas fuerzas paralelas a la superficie y constituyendo ambas un par acción reacción. Figura 2) La fuerza de roce se opone al movimiento. Se debe en gran medida a las irregularidades de las superficies que entran en contacto, como las que se aprecian en la figura 1. Su intensidad depende del tipo de fs = 0 (a) • Ventajas del roce Permite que los autos avancen, que las personas caminen y que los clavos cumplan su función, entre otras cosas. (b) Figura 3) (a) Fuerza de roce estática; (b) Fuerza de roce dinámica o cinética • • • Desventajas del roce Pérdidas de energía en los mecanismos Menor eficiencia de las máquinas. Un porcentaje no despreciable de la potencia de los motores se usan para vencerlo. Desgaste de los cuerpos que permanecen en contacto (ruedas, ejes, cojinetes, etc) fs = F ' La fuerza de roce estática fs es una fuerza que aparece cada vez que un cuerpo tiende a deslizarse sobre una superficie y se opone al posible deslizamiento. Podemos caracterizarla en tres situaciones: • • • En la siguiente tabla se muestran las ventajas y las desventajas de la existencia de roce. (c) Figura 4) Fuerza de roce estática. (a) Reposo; (b) Equlibrio estático; (c) Movimiento inminente materiales en contacto y de la intensidad con que una superficie comprime a la otra. Por definición, el roce se opone al movimiento, por lo que la fuerza de roce tendrá sentido opuesto a éste, tal como se aprecia en la figura 2. (b) En la situacion de reposo (figura 4a), no hay ninguna fuerza que intente provocar deslizamiento, por lo que fs = 0. En la situación de equilibrio estático (figura 4b), la fuerza F’ aplicada sobre el cuerpo no es suficiente para provocar su deslizamiento, debido a que la fuerza de fricción se encarga que mantener el equilibrio estático. De ahí que fs = F’. En la situación de movimiento inminente Figura 5) Fuerza de roce cinética (figura 4c), el cuerpo está “a punto” de deslizarse. En este punto, la fuerza fs alcanza un umbral dado por fs = f smáx = µ s ⋅ N , donde: o fsmax es la mínima fuerza que se requiere para que el cuerpo inicie su movimiento o N es la fuerza normal del cuerpo. o µs (µe) es el coeficiente de roce estático. Es una constante adimensional que Figura 6) Regiones estática y dinámica 3 4 Física General I Paralelos 05 y 22. Profesor Rodrigo Vergara R depende de las superficies en contacto. En general, 0 ≤ µs < 1 La fuerza de roce cinética o dinámica fk es aquella que se presenta cuando el cuerpo está en movimiento (ver figura 5). Es de valor constante y está dada por f k = µ k ⋅ N , donde: • • N es la fuerza normal del cuerpo. µk (µc) es el coeficiente de roce cinético. Es una constante adimensional que depende de las superficies en contacto. En general, 0 ≤ µk ≤ µe < 1 En la figura 6 se muestra la relación entre la fuerza de roce y la fuerza aplicada al cuerpo. Para F < fsmax, el cuerpo está en la región estática, y la fuerza de roce es estática. Para F ≥ fsmax el cuerpo está en la región cinética, y la (a) fuerza de roce es cinética. El roce por deslizamiento se rige por las siguientes leyes: • Ley Nº1) Los coeficientes de roce dependen de la naturaleza de las sustancias en contacto. No es el mismo coeficiente si se trata de hierro sobre hierro, madera sobre madera o madera sobre hierro (ver figura 7a) • Ley Nº2) Los coeficientes de roce dependen del grado de pulimentación o rugosidad de las superficies, es decir, si son lisas o rugosas (ver figura 7b) (b) Física General I Paralelos 05 y 22. Profesor Rodrigo Vergara R B) Las fuerzas de roce viscosa y de arrastre Las fuerzas de roce viscosa y de arrastre son aquellas fuerzas de roce provocadas por la interacción de un cuerpo en un medio líquido o gaseoso. Ejemplos de estos fenómeno son: • Roce sobre un cuerpo sumergido en agua o aceite • Roce sobre un cuerpo en caída vertical en la atmósfera En la figura 9 se muestra un cuerpo de masa m cayendo a gran altura desde el reposo. En la situación inicial (figura 9a), a velocidad inicial del cuerpo es cero. La fuerza de frenado es cero y el cuerpo cae efectivamente en caída libre. Pero a medida que aumenta la velocidad, aumenta la fuerza de frenado D, disminuyendo la aceleración neta del cuerpo (figura 9b). Finalmente, en el momento en que la fuerza de frenado D se iguala al peso, el cuerpo adquiere una velocidad terminal vT (figura 9c). • • m m mg mg (a) (b) (c) (d) Fuerzaa de roce viscosa) Asume que la fuerza de arrastre D es directamente proporcional a la velocidad del objeto, esto es: Ley Nº3) Las fuerzas de roce son independientes de las áreas de las superficies en contacto (ver figura 7c) Ley Nº4) La fuerza de roce cinética es independiente de las velocidades de los cuerpos en contacto (ver figura 7d) Ley Nº5) Las fuerzas de roce son siempre opuestas al deslizamiento y tangentes a las superficies en contacto (ver figura 8) m mg (c) Figura 9) Movimiento vertical con fricción de aire. (a) Situación de inicio; (b) Situación transiente; (c) Situación terminal. D(v ) = −b ⋅ v [1] Donde v es la velocidad instantánea del cuerpo, y b es un coeficiente de roce viscoso, que depende de las propiedades del cuerpo (tamaño y forma) y de las propiedades del aire, especialmente su densidad. Este modelo es válido para objetos que caen lentamente en el aire, y para objetos muy peqiueños, como partículas de polvo. El signo menos de [1] indica que la fuerza de arrastre se opone al aumento de velocidad. Aplicando la 2º Ley de Newton al cuerpo de masa m m ⋅ g − b ⋅v = m ⋅ a ⇒ a = g − b ⋅ v [2] m donde a es la aceleración neta del cuerpo. Expresando a = dv/dt dv b = g − ⋅v ⇒ dt m Figura 8) Ley Nº05 del roce por deslizamiento D En general, la magnitud de la fuerza de frenado puede depender de la velocidad de formas muy complejas. Para efectos de este curso, se van a considerar dos modelos: Figura 7) Leyes del roce por deslizamiento. (a) Ley Nº1; (b) Ley Nº2; (c) Ley Nº3; (d) Ley Nº4; (e) Ley Nº5. • D dv dv b = dt ⇒ = dt [3] b mg m g − ⋅v −v m b 5 6 Física General I Paralelos 05 y 22. Profesor Rodrigo Vergara R Integrando ambos lados de [2], suponiendo caída libre, es decir v(0) = 0 y sabiendo que dv ∫ k − v = −ln(k − v ) Física General I Paralelos 05 y 22. Profesor Rodrigo Vergara R desplazan a grandes velocidades. El signo menos de [7] indica que la fuerza de arrastre se opone al aumento de velocidad. mg v t −v t dv b b b mg b ∫0 mg = ∫0 m dt ⇒ − ln b − v = m ⋅ t 0 ⇒ ln mg = − m ⋅ t 0 −v b b mg −v b b − ⋅t mg mg − m ⋅t ⇒ b =e m ⇒ −v = ⋅e [4] mg b b b b b − ⋅t − ⋅t mg m m ⇒ v = v (t ) = 1 − e = v 1 − e T b Aplicando la 2º Ley de Newton al cuerpo de masa m v donde vT = mg/b es la velocidad terminal del cuerpo m ⋅ g −α ⋅v 2 = m ⋅ a ⇒ a = g − dv α = g − ⋅v 2 ⇒ dt m y v (t )= t dy ⇒ dy = v ( t ) ⋅ dt ⇒ ∫ dy = ∫ v ( t ) ⋅ dt dt 0 0 t b b − ⋅t − ⋅t mg mg mg m - mb t m m m 1 − e ⋅ dt = 1 − e ⋅ dt = t + e − [6] ∫ b b 0 b b b 0 t ⇒ y = y ( t ) =∫ = mg m - mb t t + e − 1 b b Fuerza de roce de arrastre) Asume que la fuerza de arrastre D es directamente proporcional al cuadrado de velocidad del objeto, esto es: D(v ) = −α ⋅ v 2 [7] Donde v es la velocidad instantánea del cuerpo, y α es una constante de proporcionalidad que depende de las propiedades del cuerpo (tamaño y forma) y de las propiedades del aire, especialmente su densidad. Este modelo es válido para objetos de mayor dimensión que se dv g− α m = dt ⇒ ⋅v 2 dv α = dt [9] mg m −v2 α Integrando ambos lados de [9], suponiendo caída libre, es decir v(0) = 0, y sabiendo que du 1 a+u ∫ a 2 − u 2 = 2a ⋅ ln a − u : v mg +v t v t dv α 1 α α ∫0 mg 2 = ∫0 m dt ⇒ mg ln mg = m ⋅ t 0 [10] −v 2⋅ −v α α α 0 b b b b − ⋅t − ⋅t d d mg mg b − ⋅t mg b − m ⋅t v ( t ) = ⋅ ( − 1) ⋅ − ⋅ e m = ⋅ ⋅e = g⋅e m 1 − e m = dt dt b b b m m [5] Por integración, y suponiendo y(0) = 0 se puede hallar la función de posición del cuerpo y(t) respectivamente ⋅ v 2 [8] donde a es la aceleración neta del cuerpo. . Expresando a = dv/dt Derivando el resultado anterior, se obtiene la función de aceleración del cuerpo a(t) a (t ) = α m Si v T = mg α es la velocidad terminal del cuerpo v t v v +v 1 1 vT + v α − ln T = ⋅ t ⇒ ln T ln 2 ⋅ vT vT − v 0 m 0 2 ⋅ vT vT − v vT α = ⋅ t m 2 ⋅vT ⋅α 2 ⋅v T ⋅α ⋅t ⋅t v + v 2 ⋅ vT ⋅α v +v = ⇒ ln T ⋅t ⇒ T = e m ⇒ v T + v = e m (v T − v ) v v m v v − − T T 2 ⋅v T ⋅α 2 ⋅vT ⋅α ⋅t ⋅t 2 ⋅vT ⋅α ⋅t 2⋅vT ⋅α ⋅t [11] ⇒ v T + v = v T ⋅ e m − v ⋅ e m ⇒ v ⋅ e m + 1 = v T ⋅ e m − 1 2⋅vmT ⋅α ⋅t e −1 ⇒ v = v (t ) = v T ⋅ 2 ⋅v ⋅α = vT T e m ⋅t + 1 2 ⋅ 1 − 2⋅v ⋅α T ⋅t e m +1 7 8 Física General I Paralelos 05 y 22. Profesor Rodrigo Vergara R En [11], se observa que t → ∞ ⇒ e 2 ⋅vT ⋅α ⋅t m 2 +1 → ∞ ⇒ e vT = mg α 2 ⋅vT ⋅α ⋅t m Física General I Paralelos 05 y 22. Profesor Rodrigo Vergara R → 0 ⇒ v ( t ) → vT . Así, +1 Gráfico fuerza v/s desplazamiento corresponde efectivamente a la velocidad terminal del cuerpo. 2 ⋅vT ⋅α 2 ⋅ 2 ⋅ vT ⋅ α ⋅ e m ⋅t 2 m = vT ⋅ ( −1) ⋅ − ⋅ 1 − 2⋅vT ⋅α 2 2 ⋅vT ⋅α ⋅t ⋅t m e m +1 e + 1 mg 4⋅ ⋅ α 2⋅vT ⋅α ⋅t 2 ⋅vT ⋅α α ⋅t ⋅e m e m m = = 4 ⋅ g ⋅ 2 2 2⋅vmT ⋅α ⋅t 2⋅vmT ⋅α ⋅t e + 1 e 1 + 2 T 2 ⋅vT ⋅α ⋅t m 4 ⋅ v ⋅α ⋅e m = 2 2⋅vmT ⋅α ⋅t e + 1 • • t →0 ⇒e t →∞⇒e 2 ⋅vT ⋅α ⋅t m →1 ⇒ e e →∞⇒ 2 ⋅vT ⋅α ⋅t m 2 ⋅vT ⋅α ⋅t m e +1 → 2 2 ⋅vT ⋅α ⋅t m 2 2⋅vmT ⋅α ⋅t +1 e A x1 x2 x Figura 11) Gráfico de fuerza v/s desplazamiento [12] A partir de 12, se pueden hacer las siguientes observaciones 2 ⋅vT ⋅α ⋅t m F En la figura 11 se muestra un gráfico de fuerza en función del desplazamiento. Un caso típico en el cual se usan estos gráficos es el de la fuerza interna de un resorte. Posteriormente en este curso veremos que el producto de la fuerza por el desplazamiento es igual al trabajo mecánico. De eso, podemos deducir que el área bajo la curva del gráfico F v/s x entre x1 y x2 para un cuerpo en movimiento es igual al trabajo mecánico entregado por F sobre el cuerpo entre los instantes en que sus posiciones son x1 y x2. Derivando [11], se obtiene la aceleración del cuerpo a(t). d d a ( t ) = v ( t ) = vT dt dt v1 y v2. 1 ⇒ a (t ) → g 4 → 0 ⇒ a (t ) → 0 C) Interpretación de gráficos de fuerza F Gráfico fuerza v/s tiempo (a) Fmáx En la figura 12 se muestra un gráfico de fuerza en función del tiempo. Un caso típico en el cual se usan estos gráficos es el de las fuerzas impulsivas, que son aquellas de gran magnitud y que se aplican en un período de tiempo muy corto (por ejemplo, la fuerza de un martillo que golpea sobre un clavo). Sea A el área bajo la curva de F v/s t entre los instantes t1 y t2. En la figura 12b se muestra un gráfico de aceleración v/s tiempo, que resulta de dividir el gráfico de la figura 12a por la masa m del cuerpo al cual es aplicada la fuerza. Luego, todos los parámetros quedan divididos por m, entre ellos el A área bajo la curva, dada por A' = . De la m cinemática, sabemos que el área bajo la curva del gráfico a v/s t para un móvil entre los instantes t1 y t2 es igual al cambio de velocidades v2 – v1 entre tales instantes. Así. A t1 a= F Fm á x m t t2 m A' = (b) A m t1 t2 t Figura 12) (a) Gráfico de fuerza v/s tiempo; (b) Gráfico de aceleración v/s tiempo Gráfico fuerza v/s velocidad En la figura 10 se muestra un gráfico de fuerza en función de la velocidad. Un caso típico en el cual se usan estos gráficos es el de las fuerzas viscosa y de arrastre vistas en la sección precedente. Posteriormente en este curso veremos que el producto de la fuerza por la velocidad es igual a la potencia. De eso, podemos deducir que el área bajo la curva del gráfico F v/s v entre v1 y v2 para un cuerpo en movimiento es igual a la potencia entregada por F sobre el cuerpo entre los instantes que éste viaja con velocidades A' = Figura 10) Gráfico de fuerza v/s velocidad A = v 2 - v1 ⇒ A = m ⋅ ( v 2 - v1 ) m Luego, el área bajo la curva del gráfico F v/s t para un móvil entre los instantes t1 y t2 es igual al producto de la masa m por el cambio de velocidades v2 – v1 entre tales instantes. Posteriormente en el curso, veremos que la cantidad física m·v es conocida como moméntum lineal, y que el área bajo la curva del gráfico F v/s t es denominada impulso, que tiene las mismas dimensiones que el moméntum lineal.