Medida de temperaturas
Anuncio

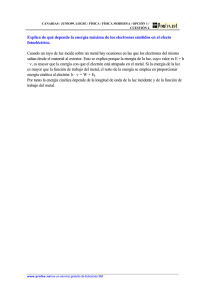
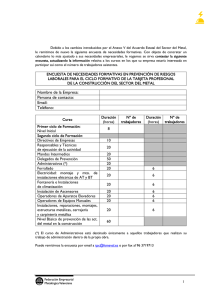
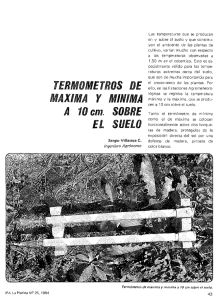
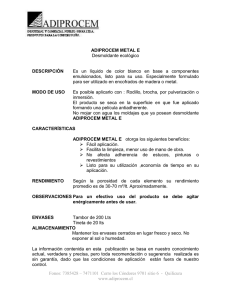
4 Medida de temperaturas Jaime Planas Rosselló Noviembre de 2002 En este capítulo se estudian las técnicas más corrientes de medidas de temperatura. 4.1 Introducción La temperatura es una magnitud física a la vez intuitiva, por su relación con las sensaciones fisiológicas de frío y caliente, y elusiva, por la dificultad de acceder a su medida directa. De hecho, la temperatura está relacionada con la energía media de las moléculas de un cuerpo, por lo que es inaccesible a la observación directa y debe medirse indirectamente por la relación entre la temperatura y otras propiedades físicas de la materia. Aunque es posible una definición de la temperatura independiente de la sustancia que constituye el termómetro (escala termodinámica de temperaturas) en la práctica se utiliza la escala internacional de temperaturas, establecida por el Comité Internacional de Pesos y Medidas, cuya última versión es la de 1990 (ITS-90, international temperature scale, 1990). La escala internacional de temperaturas está definida por un conjunto de puntos fijos, dados por la temperatura de equilibrio de fases de una sustancia pura en condiciones prefijadas, junto con reglas muy precisas de interpolación. Para un examen detallado de la escala iternacional de temperaturas puede consultarse la página de internet en la dirección http://www.its-90.com. Esta página contiene el texto inglés de la ITS-90 junto con literatura complementaria y vínculos a un buen número de páginas con información sobre medida de temperaturas. En Europa, la temperatura se mide en Kelvin (K, temperatura absoluta) o en grados Celsius (°C, temperatura Celsius). Recordamos aquí que la relación entre ambas escalas es de un simple cambio de origen dado por T [K] = T [°C] + 273.15 (4.1.1) En unos pocos casos puede necesitarse la conversión de datos de temperatura expresados en otras unidades que se utilizan con frecuencia en Estados Unidos: el Rankine (R, temperatura absoluta) o el grado Farenheit (°F, temperatura Farenheit) . Las equivalencias son T [°C] = 4.2 5 (T [°F ] − 32) , 9 T [K] = 5 T [R] 9 (4.1.2) Tipos de termómetros Los termómetros patrón utilizados en la definición de la escala internacional de temperaturas son demasiado sofisticados y delicados para ser utilizados de forma corriente (de hecho, hay unos pocos termómetros patrón localizados el los centros nacionales de pesos y medidas). Los termómetros ordinarios son de tipo industrial, y, sin ánimo de ser exhaustivos, podemos citar las siguientes familias de termómetros: 1 2 Medida de temperaturas 1. Termómetros basados en la expansión térmica de las sustancias, como el clásico termómetro de mercurio. 2. Termómetros basados en los cambios de resistencia de conductores y semiconductores (termómetros resistivos). 3. Termómetros basados en el efecto termoeléctrico (termopares). 4. Termómetros basados en los cambios de de las propiedades electrónicas de dispositivos semiconductores (termómetros de circuito integrado). 5. Termómetros basados en el cambio de la de la frecuencia de oscilación de un cristal de cuarzo (termómetro de cuarzo). 6. Termómetros basados en la emisión de radiación por los cuerpos (termómetros de radiación). 7. Termómetros basados en el cambio de la velocidad del sonido en un medio material (termómetro acústico). Los termómetros de la primera familia son dispositivos completos (con su sensor y su indicador) y se adaptan mal a las medidas eléctricas, por lo que no van a ser desarrollados aquí. Para algunos detalles sobre este tipo de termómetros véase [2] y las otras referencias bibliográficas. Los termómetros de las tres últimas familias constituyen sistemas completos, muy sofisticados y costosos, y también van a dejarse para que el lector interesado consulte textos más amplios. Los termómetros de los grupos 2 y 3 son los de uso más general y van a ser descritos con cierto detalle en lo que sigue. Se hará una breve referencia a los del grupo 4 por su sencillez de aplicación y su utilidad a la hora de hacer medidas con termopares. 4.3 Termómetros resistivos Existen dos tipos básicos de termómetros resistivos: (1) aquellos en que la resistencia eléctrica está constituida por un metal o aleación (platino, niquel, cobre, manganina, etc.); y (2) aquellos en que está constituida por un material semiconductor (típicamente óxidos metálicos). Para un transductor termométrico del primer tipo usamos la denominación termo-resistencia o las siglas inglesas RTD (resistance temperature detector). Los del segundo tipo se denominan termistores (en inglés thermistor). Las termo-resistencias más extendidas son las platino, cuya denominación generica es PtX, donde Pt es obviamente el símbolo químico del platino y X es un número que expresa la resistencia electrica del RTD a 0°C en Ω. Por ejemplo, la más corriente de las termo-resistencias de platino es la Pt100, cuya resistencia nominal a 0°C es de 100 Ω. Existen también termo-resistencias de platino con otros valores nominales (por ejemplo 200, 500 o 1000 Ω). Las termo-resistencias de platino adoptan muy diversas formas y tamaños y pueden utilizarse en un intervalo de temperaturas que va desde −200 °C a cerca de 1000 °C, lo que no significa que todos los modelos cubran todo el intervalo. Muy al contrario, un mismo fabricante puede ofertar distintos modelos de sensores con las mismas características nominales (Pt100, por ejemplo) y muy distintos intervalos de utilización. La razón, por supuesto, estriba en que el funcionamiento del transductor no está condicionado sólo por la resistencia, sino tambien por su soporte y sus protecciones. Por ello es fundamental consultar los catálogos de los fabricantes antes de decidirse por una termo-resistencia para un uso particular. Las termo-resitencias de platino se fabrican en forma de (a) un arrollamiento de hilo de platino (wire wound) encapsulado en vidrio o cerámica, y (b) como una rejilla pelicular depositada sobre un substrato y, de nuevo, encapsulada en vidrio o cerámica. La forma puede ser cilíndrica o prismática y los tamaños varían desde prismas de 2.5×2.5×1.5 mm3 hasta cilindros de 30 mm de longitud y 5 mm de diámetro. Existen modelos prismáticos especialmente diseñados para la medida de temperaturas superficiales que pueden pegarse a la superficie a medir. Algunos son autoadhesivos. Dentro de los RTD’s basados en tecnologías de películas delgadas existen algunos especialmente diseñados para tener una respuesta lineal en su rango de utilización. Uno de ellos conecta en serie una resistencia de niquel (cuya curva de respuesta con la temperatura es no lineal concava hacia Curvas de respuesta estática para los termómetros resistivos 3 1000 100 termistor Pt100 R/R0 10 1 0.1 0.01 0.001 0.0001 -200 -100 0 100 200 300 T (°C) 400 500 600 Figura 4.4.1 Comparación de las curvas de respuesta de un Pt100 y de un termistor. arriba) con una de manganina (cuya respuesta es no lineal concava hacia abajo). Seleccionando el valor de las resistencias puede obtenerse una respuesta combinada aproximadamente lineal. Los termistores se fabrican con materiales semiconductores, básicamente óxidos de niquel, manganeso, hierro, cobalto, titanio, y otros metales. Son relativamente baratos, aunque el precio de los termistores de precisión es del mismo orden que el de una termo-resistencia de platino. Como veremos a continuación su sensibilidad es mayor que la de una termo-resistencia, pero el intervalo de aplicación es mucho más limitado (−100 a 300 °C como máximo, y −50 a 120 °C típico.). Su morfología y tamaño son muy variados y es preciso recurrir a los catálogos de los fabricantes para aplicaciones particulares. 4.4 Curvas de respuesta estática para los termómetros resistivos La forma de respuesta estática es radicalmente distinta para una termo-resistencia y para un termistor. A título de ejemplo la Fig. 4.4.1 muestra las curvas que corresponden a una termorresistencia de platino y a un termistor típico, en un diagrama en la que la relación de resistencias se ha representado en escala logaritmica. Como puede apreciarse, tanto el rango como la forma de la curva de respuesta son radicalmente distintas. Puesto que la pendiente de las curvas representan la sensibilidad relativa, puede verse, en primer lugar, que la sensibilidad del termistor es negativa1 y, en segundo lugar, en términos absolutos la sensibilidad del termistor es del orden de 10 veces la del Pt100. Veamos las curvas correspondientes con más detalle. 4.4.1 Curva de respuesta estática para termo-resistencias En todos los textos de física general se recoge el hecho de que, en general, la resistencia eléctrica de los conductores aumenta con la temperatura, y se indica que, para variaciones pequeñas de la temperatura, la variación de la resistencia es lineal con la temperatura, por lo que puede escribirse R = R0 (1 + αT ) (4.4.1) donde R0 es la resistencia a 0 °C y α la variación unitaria de resistencia, que coincide con la sensibilidad relativa. 1 Existen en el mercado termistores con sensibilidad positiva, pero no vamos a considerarlos aquí. 4 Medida de temperaturas Evidentemente la ecuación anterior es sólo aproximada y aceptablemente precisa sólo para variaciones pequeñas de la temperatura. Cuando la variación es amplia, la ecuación tiene que enriquecerse con términos de orden superior, por lo que, en general, una termo-resistencia tendrá una respuesta que podrá aproximarse por un polinomio de grado n como sigue: ! " R = R0 1 + c1 T + c2 T 2 + c3 T 3 + · · · + cn T n (4.4.2) El número de términos a usar dependerá del material, del intervalo de utilización y de la precisión requerida. Las termo-resistencias industriales de platino están muy extendidas y han sido estudiadas exhaustivamente y también normalizadas. Las normas suministran expresiones polinómicas que definen la curva de respuesta estática media de los sensores considerados y también las máximas desviaciones admisibles para los sensores que se ajustan a la norma. Hay varias normas muy similares que difieren sólo en los detalles (IEC 751, BS 1904, ASTM E 1137)2 Para las resistencias de platino industriales se ha encontrado que una expresión adecuada que sólo depende de de tres parámetros es la siguiente (ecuación de Callendar-van Dusen) # $ % &3 '( & % &% T T T T R = R0 1 + α T − δ (4.4.3) −1 −β −1 100 100 100 100 donde α, δ y β son constantes que dependen de la norma a la que se ajusten los termómetros industriales. Para las normas europeas (IEC 751, BS 1904) y la americana ASTM 1137, se tiene α = 0.00385, δ ≈ 1.5, β = 0 para T ≥ 0 °C y β ≈ 0.11 para T < 0 °C (véase ejercicio 4.1). 4.4.2 Curva de respuesta estática para termistores La respuesta estática de un termistor es altamente no lineal, la expresión más simple para describirla es una exponencial de la inversa de la temperatura absoluta: R = aeβ/T (4.4.4) donde a y β son constantes. Si R0 es la resistencia del termistor a una temperatura de referencia T0 , la ecuación puede reescribirse como ! " β T1 − T1 0 R = R0 e (4.4.5) La temperatura de referencia normal es de 25 °C, y la resistencia correspondiente varía, para los termistores comerciales, entre 2 kΩ y 30 kΩ. El factor β varía típicamente entre 3000 y 5000 K. Los valores de a y β o de R0 y β pueden ser determinados calibrando a dos temperaturas (puntos fijos de la escala internacional, por ejemplo). El ajuste de la curva exponencial a las medidas reales tiene un error cuadrático medio del orden de 2 °C para un intervalo de temperaturas de 200 °C. Ajustes mucho mejores se consiguen cuando se limita el intervalo de aplicación del termistor. Si se requiere mejor precisión en la interpolación, puede utilizarse la ecuación de Steinhart-Hart: 1 = A + B ln R + C(ln R)3 T (4.4.6) donde A, B y C son constantes que se determinan a partir de las medidas de resistencia a tres temperaturas. La precisión que puede conseguirse con este tipo de ajuste se caracteriza por un error cuadrático medio del orden de ±0.04 °C en un itervalo de 200 °C. De nuevo, para intervalos reducidos la precisión mejora sustancialmente. 2 IEC son las siglas de la International Electrotechnical Commission, BS las de British Standard, y ASTM las de American Society for Testing and Materials. Medidas con termómetros resistivos 4.5 5 Medidas con termómetros resistivos Existen equipos de medida comerciales para termo-resistencias y termistores, que pueden incluir salidas analógicas y digitales linealizadas, además de un panel de lectura. Sin embargo, en muchos casos es preferible utilizar circuitos hechos por uno mismo para una medida concreta debido a la flexibilidad (y economía) que ello representa. Los circuitos de medida para transductores de temperatura resistivos son los mismos que hemos estudiado en el tema anterior para determinar resistencias. Lo más simple, hoy en día, es usar un circuito que produzca una salida en tensión relacionada con la resistencia y, a partir de ella, calcular por software la resistencia y a continuación la temperatura a partir de la curva de respuesta estática. Hay dos aspectos prácticos muy importantes relacionados con la medida de la temperatura que es preciso analizar con cierto detalle. Ambos están relacionados con el hecho de que la temperatura que mide el sensor puede no coincir con la temperatura que queremos medir si no tomamos las precauciones adecuadas. Normalmente estamos interesados en medir la temperatura de un cierto medio (el aire en un recinto, el agua en un baño termostático, etc). Pero la temperatura del sensor sólo coincidirá con la del medio si ambos están en equilibrio termodinámico (Principio Cero de la Termodinámica). Para conseguir el equilibrio es preciso que el termómetro tenga un buen contacto térmico con el medio, sumergiéndolo completamente en él, y que esté aislado de otras fuentes a distintas temperaturas, particularmente del ambiente. Sin embargo, no es posible evitar un ligero autocalentamiento del sensor debido a la corriente eléctrica que circula por la resistencia durante la medida, y es preciso esperar antes de efectuar la medida a que el termómetro alcance el equilibrio. Veamos estos extremos con un poco más de detalle 4.5.1 Autocalentamiento Un punto clave en el diseño del circuito de medida es el calor disipado por efecto Joule en la resistencia: la intensidad que circula por la resistencia produce una potencia calorífica I 2 R que tiende a aumentar la temperatura del sensor por encima de la del medio hasta que la potencia calorífica transmitida desde el sensor al medio iguala a la recibida por efecto Joule. Lógicamente, cuanto mayor es la intensidad, mayor es el aumento de temperatura y, por tanto, es preciso limitar la intensidad que recorre la resistencia para no cometer un error excesivo. Para cuantificar el aumento de temperatura, podemos suponer, en primera aproximación, que la velocidad a la que se transfiere calor del sensor al medio es proporcional a la diferencia de temperaturas entre ambos: IQ1 = CD ∆T = CD (Ts − T ) (4.5.1) donde IQ1 es la intensidad calorífica o cantidad de calor que, por unidad de tiempo, pasa del interior del sensor al medio, CD es el coeficiente de disipación que mide la capacidad de flujo de calor entre el interior del sensor y el medio, Ts es la temperatura del sensor y T la temperatura del medio (que es lo que queremos medir). En régimen estacionario, la potencia disipada por efecto Joule debe ser igual a la intensidad calorífica que pasa al medio, es decir I 2 R = IQ1 , lo que implica que la difencia de temperaturas entre el sensor y el medio es ∆T = Ts − T = 1 2 I R CD (4.5.2) lo que indica que la diferencia de temperaturas es proporcional al cuadrado de la intensidad que circula por el sensor y a su resistencia. El coeficiente de disipación CD se mide típicamente en mW/°C o en mW/K, y es un dato corrientemente suministrado por el fabricante del sensor. CD depende no solo del sensor sino del medio en el que se encuentra. Es mucho mayor para líquidos que para gases y aumenta cuando el medio está en movimiento relativo con el sensor, ya sea debido a un flujo continuo (fluido en una tubería) o porque existen dispositivos de agitación. Los valores típicos del coeficiente de disipación oscilan 6 Medida de temperaturas entre 1 y 200 mW/°C. Algunos fabricantes dan en sus tablas de características el error por disipación que no es otro que la inversa de CD , que se mide en °C/mW. En el caso de que no se conozca el coeficiente de disipación para un sensor y medio dados, es posible determinarlo siguiendo la técnica ilustrada en el ejercicio 4.2. 4.5.2 Constante de tiempo Al efectuar la medida es preciso esperar a que el termómetro alcance el equilibrio con el medio. El tiempo necesario depende como antes de las características del sensor y de las del medio. En la aproximación más simple, que veremos con detalle al estudiar la respuesta dinámica de los sistemas de medida, la diferencia entre la temperatura del sensor y la del medio (supuesto que el medio está a temperatura constante) evoluciona en forma exponencial decreciente: ∆T = Ts − T = ∆0 T e−t/τ (4.5.3) donde ∆0 T es la diferencia inicial de temperaturas (en t = 0) y τ es la constante de tiempo del sistema termómetro-medio. La constante de tiempo suele definirla el fabricante del sensor para algunas utilizaciones características y, para termómetros resistivos oscila entre unas décimas de segundo y unos segundos. Nótese que si entre el sensor y el medio se interpone alguna capa de material (por ejemplo, una película de aislamiento eléctrico) la constante de tiempo puede aumentar sensiblemente. A partir de la constante de tiempo y de la diferencia de equilibrios inicial es muy facil establecer el tiempo que hay que esperar para que la diferencia de temperaturas entre sensor y medio sea inferior al máximo error admisible por este concepto. El modelo anterior corresponde al más simple de los sistemas posibles, denominado sistema de primer orden. Para termómetros con una cierta complejidad extructural, este modelo puede ser demasiado simplificado y es preciso adoptar modelos más complejos que llevan a la aparición de varias constantes de tiempo. Por ejemplo, en un modelo con dos constantes de tiempo la diferencia de temperaturas evolucionaría en la forma * ) ∆T = ∆0 T (1 − α)e−t/τ1 + αe−t/τ2 (4.5.4) donde τ1 y τ2 son las constantes de tiempo y α una constante que determina la proporción en que influyen las dos exponenciales. Salvo que se indique expresamente lo contrario, supondremos siempre que una aproximación de primer orden es suficiente. Ejercicios 4.1 Comprobar que la ecuación de la norma ASTM E 1137 dada en el ejemplo 1.5.1—ecuación (1.5.2)— coincide con la ecuación de Callendar-van Dusen y determinar las relaciones entre las constantes α, δ y β y las constantes A, B y C y sus valores numéricos.[Solución: α = A + 100B = 0.00385, δ = 100(A − α)/α = −104 B/α = 1.507, β = 0 para T ≥ 0 °C y β = −108 C/α = 0.110 para T < 0 °C] 4.2 Un sensor térmico Pt100 quiere usarse para medir la temperatura de un baño de aceite en el entorno de 250°C y se desconoce el coeficiente de disipación del sensor en esas condiciones. Para determinarlo, se hace un montaje de cuatro hilos usando una fuente de intensidad regulable y se mide la temperatura del sensor primero con una intensidad de 3.0 mA y después con una intensidad de 5.0 mA, siendo las temperaturas correspondientes de 250.41 y de 250.86 °C. Estímese el coeficiente de disipación ¿Qué intensidad habría que utilizar para tener un error por autocalentamiento en la medida inferior a 0.2 °C? [Solución: CD ≈ 6.9 mW/°C; Imax ≈ 2.6 mA.] Termopares 4.6 7 Termopares Los termopares son probablemente los transductores de temperatura más usados en la medida rutinaria de temperaturas, por su robustez y economía y porque son activos, es decir, generan una tensión eléctrica sin necesidad de fuente de alimentación. En contrapartida, su sensibilidad es baja (de unos pocos µV por °C), por lo que requieren medidas con alta resolución, y son altamente no lineales. En esta sección estudiamos, de forma muy elemental, las leyes básicas que gobiernan el funcionamiento de los termopares y damos algunas reglas para su correcta utilización. 4.6.1 Leyes básicas de los termopares Los termopares están basados en el efecto termoeléctrico que se origina en un circuito formado por metales de diferente composición cuando se somete dicho circuito a una distribución no uniforme de temperaturas. La causa última es el movimiento de los electrones libres que (1) se difunden de un metal hacia el otro en los contactos entre distintos metales, y (2) se difunden dentro del mismo metal debido a las diferencias de temperatura. El resultado es que se genera una fuerza electromotriz en el circuito que se manifiesta como una tensión eléctrica si se intercala en el circuito un voltímetro de alta impedancia (Fig. 4.6.1a). (a) (b) metal A metal A T2 T1 metal B (c) metal C metal B + + V V (d) metal A T1 EAB(T1) metal B EAB(T2) + metal A referencia a 0°C T2 = 0°C EAB(0°C) T1 T2 metal B V = EAB(T1) – EAB(T2) EAB(T1) metal B + V=V 0 AB metal B metal B = EAB(T1) – EAB(0°C) Figura 4.6.1 (a) Esquema de circuito termoeléctrico. (b) Esquema de medida con un termopar. (c) Esquema de fuerzas electromotrices. (d) Esquema de circuito con una temperatura de referencia a 0 °C, el punto de fusión del hielo. Aunque el estudio detallado del efecto termoeléctrico es relativamente complejo porque involucra varios fenómenos acoplados (véase, por ejemplo, [1]), sus efectos prácticos pueden estudiarse con modelos sencillos como se describe a continuación. Consideremos en primer lugar un termopar, en el que el circuito está típicamente formado por dos hilos o alambres, de dos metales o aleaciones distintas A y B, soldados uno a otro en sus extremos, tal como esquematiza la figura 4.6.1b. En este caso, si los hilos son homogéneos, la tensión generada depende sólo de las temperaturas de las dos soldaduras, T1 y T2 . El comportamiento del termopar puede representarse por el circuito equivalente de la figura 4.6.1c, en el que hay dos fuerzas electromotrices concentradas, una en cada una de las soldaduras, representadas por dos pilas en la figura3 . La fuerza electromotriz en cada unión depende de la temperatura de dicha unión y es una propiedad del par de metales considerados. Para aplicar este modelo, es preciso ser consistente con los signos, de manera que el electrodo positivo de cada pila esté en contacto con el mismo material (el material A en el caso de la figura). 3 En realidad la fuerza electromotriz está distribuida en todo el circuito, pero si los hilos del termopar son homogéneos, el circuito equivalente aquí introducido es perfectamente válido. 8 Medida de temperaturas (a) (b) metal A metal A ≡ T1 metal B T1 T1 metal C metal B metal A metal A EAB(T) metal B ≡ EAC(T) metal C ECB(T) metal B Figura 4.6.2 (a) Neutralidad de un metal interpuesto. (b) Circuitos equivalentes. De acuerdo con el modelo, la tensión termoeléctrica V medida en el circuito viene dada por V = EAB (T1 ) − EAB (T2 ) (4.6.1) donde EAB (T ) es una función característica del par metálico considerado que es preciso determinar experimentalmente para poder usar el termopar como termómetro. Si dicha función es conocida y conocemos también la temperatura de una de las dos soldaduras (T2 , por ejemplo) es posible determinar la temperatura T1 de la otra soldadura a partir de la ecuación anterior una vez que se ha medido la tensión V . Para determinar la función EAB (T ) debe calibrarse el termopar poniendo su soldadura de referencia a una temperatura fija conocida y variando la temperatura de la otra soldadura (soldadura de medida) mientras se mide V . En la práctica, la temperatura de referencia usada para la calibración es el punto de hielo (punto de solidificción del agua o de fusión del hielo, 0° C), tal como se esquematiza en la figura 4.6.1. 0 donde el superíndice 0 indica que El resultado de la calibración es la tensión termoeléctrica VAB la temperatura de la soldadura de referencia es 0 °C. En estas condiciones, de la ecuación anterior puede despejarse la fuerza electromotriz como 0 0 EAB (T ) = VAB (T ) + EAB (4.6.2) 0 donde EAB es la fuerza electromotriz para 0 °C. Como puede observarse en la ecuación (4.6.1), las tensiones termoeléctricas aparecen como diferencias de fuerzas electromotrices, por lo que las fuerzas electromotrices pueden determinarse salvo 0 una constante aditiva arbitraria. Esto es lo mismo que decir que EAB es arbitraria y puede tomarse igual a cero, con lo cual la fuerza electromotriz y la tensión termoeléctrica son numéricamente iguales. Sin embargo, para circuitos termoeléctricos más complejos, es mejor utilizar la expresión (4.6.1) para detectar posibles errores de signo: si el problema está bien operado, las fuerzas electromotrices para 0 °C deben aparecer tantas veces con signo positivo como negativo y, por tanto, deben desaparecer de las ecuaciones. Para poder resolver problemas más generales, es necesario introducir una ley básica más en cuanto al funcionamiento de los termopares. Dicha ley establece que si dos metales A y B se conectan mediante un tercero C cualquiera, es como si se conectaran directamente, siempre que las uniones estén a la misma temperatura (Fig. 4.6.2a). Dibujando los circuitos equivalentes con las fuerzas electromotrices correspondientes (Fig. 4.6.2b) se llega a la conclusión de que EAC (T ) + ECB (T ) = EAB (T ) (4.6.3) El resultado anterior permite simplificar los circuitos de medida de manera que rara vez se materializa la unión de referencia como una soldadura. En la práctica los dos extremos del termopar que corresponden a la referencia se conectan directamente al circuito de medida mediante terminales atornillados o conectores adecuados. Como los conductores del circuito de medida son usualmente de cobre, el esquema del circuito resultante el ilustrado en la figura 4.6.3a, cuyo circuito equivalente es el de al figura 4.6.3b y, de acuerdo con la ley anterior, la tensión termoeléctrica medida resulta ser idéntica a la del circuito de la figura 4.6.1b. Termopares 9 metal A + T2 T1 (b) Cu V Cu metal B bloque isotérmico metal A EACu(T2) Cu + (a) EAB(T1) V= EAB(T1) – EACu(T2)+ECuB(T2) Cu metal B ECuB(T2) Figura 4.6.3 (a) Esquema de circuito usual de medida. (b) Circuito equivalente. Tabla 4.6.1 Tipos y composición de los termopares comerciales Tipo B E J K N R S T Metal A Pt-30%Rh Ni-10%Cr Fe Cromel (Ni-10%Cr) Ni-14%Cr-1.5%Si Pt-13%Rh Pt-10%Rh Cu Metal B Pt-6%Rh Constantan (45Ni-55Cu) Constantan Alumel (Ni-5%[Al,Si]) Ni-4.5%Si-0.1%Mn Pt Pt Constantan Nótese que para poder aplicar este resultado, es preciso garantizar que las uniones de los metales A y B con el circuito de medida están a la misma temperatura. Esto se consigue situandolas próximas entre sí y sujetas a un bloque con buena conductividad térmica (pero manteniendo el aislamiento eléctrico). 4.6.2 Curvas de calibración estática para termopares Cualquier par de metales o aleaciones distintos (incluso cuando difieren sólo en los tratamientos térmicos y mecánicos) puede producir un efecto termoeléctrico. Sin embargo, para que puedan ser utilizados industrialmente, la señal debe ser suficientemente alta y muy estable. Por ello existen un conjunto relativamente pequeño de termopares comerciales, cuyo tipo se identifica por una letra. Las composiciones de los termopares comerciales más corrientes se recogen en la tabla 4.6.1. El metal o aleación que aparece en primer lugar en la composición es el más electro-positivo. Los más utilizados para temperaturas no muy altas son los de los tipos J, K y T. Las curvas de respuesta estática para estos termopares se recogen en tablas, como por ejemplo las de la norma ASTM E 230, incluidas también en la referencia [1]. Puede encontrarse una edición electrónica de las tablas en la página http://www.pyromation.com/downloads/tables.html. Como el uso de tablas es poco adecuado para el cálculo automático, se han desarrollado expresiones analíticas que interpolan los valores de la tabla con buena precisión. La mayoría son expresiones polinómicas de muchos términos (del orden de 10) que no deben ser usados en cálculos manuales. También existen funciones que dan la temperatura como una expresión analítica de la tensión termoeléctrica (para temperatura de referencia a 0 °C). Los coeficientes de las funciones correspondientes para los termopares normalizados pueden encontrarse en la página web del NIST4 en la dirección: http://srdata.nist.gov/its90/main/its90 main page.html. 4 National Institute of Standards and Technology, USA.