CONTACTO ENTRE SOLIDOS
Anuncio

CONTACTO ENTRE SOLIDOS
Índice
1. Apoyos y enlaces entre sólidos
2
2. Acciones en apoyos y enlaces lisos
2.1. Contacto liso puntual . . . . . . . .
2.1.1. Solidos en contacto puntual
2.2. Contacto liso no puntual . . . . . .
2.2.1. Rótula esférica . . . . . . .
2.2.2. Empotramiento perfecto . .
2.2.3. Árbol circular en cojinete .
.
.
.
.
.
.
2
2
2
2
3
3
4
.
.
.
.
5
6
6
7
7
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3. Acciones en apoyos y contactos reales
3.1. Modelo de Coulomb y Morin de las acciones de contacto reales
3.1.1. Fuerza de Resistencia al deslizamiento . . . . . . . . .
3.1.2. Momento de Resistencia a la rodadura . . . . . . . . .
3.1.3. Momento de Resistencia al pivotamiento . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1.
Apoyos y enlaces entre sólidos
En Mecánica se consideran exclusivamente sistemas mecánicos de un número finito de grados
de libertad, cuyo caso más frecuente es un conjunto finito de sólidos en contacto. Lo que vamos
a tratar son las diversas formas de apoyo y enlace entre sólidos en contacto que pueden aparecer.
Para que se produzca un movimiento de sólidos en contacto (cinemática) debe existir una
interacción entre los mismos (dinámica), que se manifiesta a través de una serie de acciones/reacciones de contacto entre ellos de naturaleza electromagnética.
Nuestro interés estriba en analizar el sistema de incógnitas introducidas para modelizar
dicha interacción.
2.
2.1.
Acciones en apoyos y enlaces lisos
Contacto liso puntual
Hipótesis básica del contacto liso puntual: cuando las superficies de dos sólidos se
tocan en un punto, la acción de uno sobre el otro es una fuerza perpendicular al plano tangente
común en dicho punto.
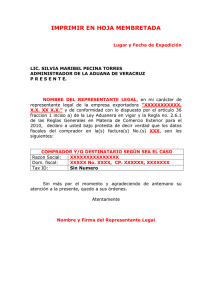
2.1.1.
Solidos en contacto puntual
Fuerza normal al plano tangente común cuando el plano tangente esté definido o fuerza con
cualquier dirección cuanto el plano tangente permanezca indefinido.
N̄
R̄
N̄
Figura 1: Casos de contacto puntual
2.2.
Contacto liso no puntual
Si el contacto entre sólidos se realiza en un conjunto de puntos aislados, el tratamiento es
análogo al contacto puntual: en cada punto consideramos una reacción incógnita normal al
plano tangente común local.
Si el contacto no se da en una serie de puntos aislados, este deberá darse en un conjunto denso
(incluido en una variedad unidimensional o bidimensional). Aparece entonces una distribución
incógnita que asocia a cada punto de la variedad de contacto una reacción elemental (por unidad de longitud o por unidad de superficie) normal al plano tangente local. La Mecánica no
es capaz de calcular la distribución incógnita de reacciones normales en la zona de contacto.
Sin embargo, lo que puede calcular es la reducción de la distribución incógnita en un punto, es
decir, la resultante y el momento en ese punto.
Variedad unidimensional
dN̄(u) = n̄l (u) ds(u)
Z
R̄ =
dN̄
C
Z
OM ∧ dN̄
M̄O =
Variedad bidimensional
dN̄(u1 , u2) = n̄s (u1, u2 ) dσ(u1, u2 )
Z
R̄ =
dN̄
Σ
Z
M̄O =
OM ∧ dN̄
C
Σ
El número de incógnitas que resultan de esa reducción puede estar entre 1 y 6. Las incógnitas
que no aparecen son aquellas de las que se sabe con certeza que son nulas a priori y están
asociadas a ciertos grados de libertad del movimiento relativo entre ambos sólidos.
El procedimiento de análisis es el siguiente: se efectúa un estudio cuidadoso de las acciones
normales a lo largo de la zona de contacto.
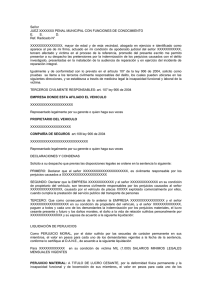
2.2.1.
Rótula esférica
Reducción al centro O de la esfera:
R̄ = X~ı + Y ~ + Z~k, M̄O = 0̄
R̄
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxx
xxxxxxxxxxxxxx
xxxxxxxxxxxxxx
xx
xxxxxxxxxxxxxx
x xx
x xx
x xx
x xx
x xx
x xx
x xx
x xx
x xx
x xx
x xx
x xx
x xx
x xx
x xx
x xx
x xx
x xx
x xx
xxxx
x xx
xxxx
x
xxxx
xxxx
O
O
xxxxx
xxxxx
xxxxx
xxxxx
Figura 2: Rótula esférica
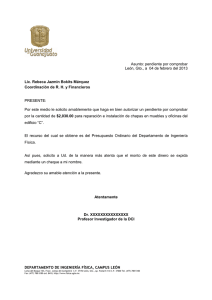
2.2.2.
Empotramiento perfecto
Reducción a un punto P :
R̄ = Fx~ı + Fy~ + Fz~k, M̄P = Mx~ı + My~ + Mz~k
xxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxxxxx
P
xxxxxxxxxxxxx
xxxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxxxx
R̄
xxxxxxxxxx
xxxxxxxxxx
xxxxxxxxxx
xxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxx
xxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxxxx
P
xxxxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
xxxxxxxxxxx
Figura 3: Empotramiento Perfecto
M̄P
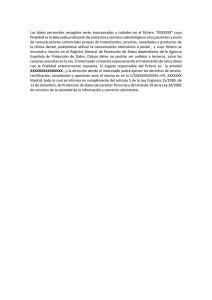
2.2.3.
Árbol circular en cojinete
Caso general Reducción a un punto O del eje Oz:
R̄ = Fx~ı + Fy~, M̄O = Mx~ı + My~
M̄
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
x
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
x
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
y
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
y
F̄
O
O
F̄
M̄
Figura 4: Cojinete simple
Caso con restricción axial Reducción a un punto O del eje Oz:
R̄ = Fx~ı + Fy~ + Fz~k, M̄O = Mx~ı + My~
xxxx
xxxx
x
xxxx
xxxx
xxxx
xxxx
xxxx
xxxx
xxxx
xxxx
xxxx
O
M̄
xxxxxxxxxxxxxxx
xxxxxxx
xxxxxxxxxxxxxxx
xxxxxxx xxxxxx
xxxxxx
x
xxxxxxxxxxxxxxx
xxxxxxx xxxxxx
xxxxxx
xxxxxxxxxxxxxxx
xxxxxxx
xxxxxxxxxxxxxxx
xxxxxxx
xxxxxxxxxxxxxxx
xxxxxxx xxxxxx
xxxxxx
xxxxxxxxxxxxxxx
xxxxxxx
xxxxxx
xxxxxxxxxxxxxxx
xxxxxxx xxxxxx
xxxxxx
xxxxxxxxxxxxxxx
xxxxxxx
xxxxxxxxxxxxxxx
xxxxxxx
xxxxxxxxxxxxxxx
xxxxxxx xxxxxx
xxxxxx
xxxxxxxxxxxxxxx
xxxxxxx
xxxxxx
x
xxxxxxxxxxxxxxx
xxxxxxx
xxxxxxxxxxxxxxx
xxxxxxx xxxxxx
xxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
z
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
y
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
F̄
O
F̄
F̄
M̄y
Figura 5: Cojinete con impedimento axial
Caso de cojinete infinitesimal u oscilante Reducción a un punto O del eje Oz:
R̄ = Fx~ı + Fy~, M̄O = 0̄
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
O
Figura 6: Cojinete oscilante
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
Fx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
O
Fy
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
xxxxxxxxxxxxxxx
3.
Acciones en apoyos y contactos reales
Los contactos reales entre sólidos no responden al sencillo modelo de contacto liso por las
siguientes causas:
Las superficies no son completamente lisas porque la rugosidad macroscópica y microscópica introduce reacciones tangenciales
Debido a la elasticidad macroscópica y microscópica de los sólidos reales se produce
contacto en todo un área y que además no tiene por qué ser plana.
Supongamos un contacto entre sólidos en el que
alguno está definido por una variedad bidimensional. Consideremos un sistema de referencia cuyos
versores ~u1 y ~u2 están en el plano tangente común
en M y ~u3 es perpendicular al plano tangente en
M.
En general, la reducción a un punto M de las
acciones de contacto reales sobre uno de los sólidos
produce una fuerza resultante R̄ y un momento
resultante M̄M generales y los opuestos en el otro
(ver figura 10).
La resultante de fuerzas R̄ se descompone en:
~u3
1
xxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxx
xxxxxxxxxxxxx
xxxxxxx
xxxxxxxxxxxxx
xxxxxxx
xxxxxxxxxxxxx
xxxxxxx
xxxxxxx
xxxxxxx
M
~u1
2
~u2
M
v̄20
0
una componente normal al plano tangente común N̄ = N~u3 , denominada reacción normal.
una componente tangencial F̄R = T1~u1 + T2~u2 , denominada fuerza de rozamiento (o de
resistencia al deslizamiento).
R̄ = T1~u1 + T2~u2 + N~u3
|
{z
} |{z}
F̄R
N̄
El momento en M de las fuerzas M̄M se descompone en:
una componente normal al plano tangente común M̄ p = M3~u3 , denominada momento de
resistencia al pivotamiento.
una componente tangencial M̄ r = M1 ~u1 + M2~u2 , denominada momento de resistencia a
la rodadura.
M̄M = M1~u1 + M2~u2 + M3~u3
|
{z
} | {z }
M̄ r
M̄ p
N̄b
En caso de que el contacto sea entre partícula M y curva
la cosa cambia ligeramente:
R̄ = F̄R + N̄
F̄R = FR ~t
N̄ = Nn ~n + Nb ~b
M̄M = 0̄
C
N̄
F̄R ~t
~b
M ~n
N̄n
Se han propuesto toda una serie de modelos matemáticos de procedencia empírica para
abordar las reacciones de contacto reales entre sólidos.
El más sencillo, y sin embargo suficientemente aproximado en muchas ocasiones, es el de
los franceses Coulomb y Morin. Lo introducimos a continuación porque será el que usemos en
nuestros análisis a partir de ahora.
3.1.
Modelo de Coulomb y Morin de las acciones de contacto reales
3.1.1.
Fuerza de Resistencia al deslizamiento
Sea el movimiento de dos sólidos (S2 y S0 ) en contacto puntual en M:
Hay que distinguir dos casos:
M
1. No hay deslizamiento: v̄20
= 0̄
T1 y T2 son incógnitas.
Además, para que sea posible el movimiento sin deslizamiento debe satisfacerse la siguiente
condición dinámica de no-deslizamiento:
|F̄R | ≤ f |N̄|
donde f es una constante adimensional no negativa, de procedencia experimental, denominada coeficiente de rozamiento.
La caracterización geométrica de la condición anterior es la siguiente: la reacción debe
estar en el interior del cono de rozamiento, un cono con vértice en el punto M, cuyo eje
es la normal común en M y con semiángulo cónico ϕ = arctan f
ϕ
R̄
N̄
M F̄R
Figura 7: Cono de rozamiento
M
2. Hay deslizamiento: v̄20
6= 0̄
En este caso la fuerza de rozamiento satisface la siguiente ecuación:
F̄R = −f |N̄ |
M
v̄20
M
|v̄20
|
donde de nuevo f es un coeficiente de rozamiento constante que generalmente toma un
valor distinto del caso anterior, aunque muy próximo, por lo que se suele tomar idéntico
para simplificar.
3.1.2.
Momento de Resistencia a la rodadura
Hay que distinguir dos casos:
r
1. No hay rodadura: ω̄20
= 0̄; M1 y M2 son incógnitas.
Además, para que sea posible el movimiento sin
rodadura debe satisfacerse la siguiente condición
dinámica:
δ
r
|M̄ | ≤ δ|N̄|
donde δ es una constante no negativa con dimenMr
N̄
siones de longitud y de procedencia experimental
denominada coeficiente de resistencia a la rodadura.
La caracterización geométrica de la condición Figura 8: Geometría de la resistencia a la
anterior es la siguiente: la linea de acción de la rodadura
reacción solo puede desplazarse un brazo de longitud δ del punto M.
r
2. Hay rodadura: ω̄20
6= 0̄
En este caso el momento de resistencia a la rodadura satisface la siguiente ecuación:
ω̄ r
M̄ r = −δ|N̄ | 20
r
|ω̄20
|
donde de nuevo δ es un coeficiente de resistencia a la rodadura constante que generalmente toma
un valor distinto del caso anterior, aunque muy próximo, por lo que se suele tomar idéntico
para simplificar.
3.1.3.
Momento de Resistencia al pivotamiento
Hay que distinguir dos casos:
p
1. No hay pivotamiento: ω̄20
= 0̄; M3 es incógnita.
Además, para que sea posible el movimiento sin
pivotamiento debe satisfacerse la siguiente condición:
|M̄ p | ≤ ǫ|N̄ |
M̄ p
δ
donde ǫ es una constante no negativa con dimensioM̄ r
F̄R
nes de longitud y de procedencia experimental denominada coeficiente de resistencia al pivotamienR̄ N̄
to.
α
La reacción real, a la vez que desplazar su línea de aplicación una distancia δ de M, se desvía
un pequeño ángulo α respecto al plano perpendicular al momento de rodadura: |N̄| = |R̄| cos α ≈ Figura 9: Geometría de la resistencia al pi|R̄|, |F̄R | = |R̄| sin α ≈ α|N̄|.
votamiento
p
|M̄ | = δα|N̄| ⇒ ǫ = δα
p
2. Hay pivotamiento: ω̄20
6= 0̄
En este caso el momento de resistencia al pivotamiento satisface la siguiente ecuación:
ω̄ p
M̄ p = −ǫ|N̄ | 20
p
|ω̄20
|
donde ǫ es un coeficiente de resistencia al pivotamiento constante que toma un valor distinto
del caso anterior, aunque muy próximo, por lo que se suele tomar idéntico para simplificar.
N̄
M̄M
R̄
M̄ p
M3
M̄ r
M1
M2
T2
M
T1
F̄R
Figura 10: Esquema de acciones de contacto del sólido 0 sobre el 2
Cuadro 1: Modelo de Coulomb y Morin de acciones de contacto
Modelo Caso
F̄R
Sin deslizamiento
Incógnitas Ecuaciones
Condición
(número)
de existencia
T1 , T2
M
Con deslizamiento v̄20
M̄
M̄
r
p
adicionales
M
(2) v̄20
= 0̄
(2) F̄R = −f |N̄|
|F̄R | ≤ f |N̄ |
M
v̄20
M|
|v̄20
M
v̄20
6= 0̄
Sin rodadura
r
M1 , M2 (2) ω̄20
= 0̄
|M̄ r | ≤ δ|N̄ |
Con rodadura
r
ω̄20
r
ω̄20
r
(2) M̄ = −δ|N̄ | r
ω̄20
6= 0̄
|ω̄20 |
Sin pivotamiento
M3
p
(1) ω̄20
= 0̄
|M̄ p | ≤ ǫ|N̄ |
Con pivotamiento
p
ω̄20
p
ω̄20
(1) M̄ = −ǫ|N̄ | p
|ω̄20 |
p
ω̄20
6= 0̄
r
p