Transformada Z - Universitat de València
Anuncio

Transformada Z
Procesado Digital de Señales.4º Ingeniería Electrónica.
Universitat de València. Profesor Emilio Soria.
1
Definición y propiedades. Causalidad y estabilidad
Juega elx(n)
mismo
Definición:
La
Transformada
Z yde
unaPDS.
señal discreta
se papel en procesado digital
Definición
y uso
en
Definición y propiedades.
Causalidad
estabilidad
de señales que la Transformada de Laplace
efine como la serie de potencias:
Dada una Zsecuencia
discreta
efinición: La Transformada
de una señal
discretax(n)
x(n)se
se
en el análisis de sistemas continuos.
Z-3
∞
!
fine como la serie de potencias:
define su transformada
Z como
−n Z - 3
X(z)
=
x(n)z
∞
Usos más comunes.
!
sform of a General
Signal
donde
z
es
una
−n x[n]:
X(z) =
x(n)z
nsform of a General
Signal n=−∞
x[n]:
variable compleja.
n=−∞
onde
es variable
una variable
compleja
(z ∈ C).
nde z esz una
compleja (z
∈ C).
Obtención de expresiones entrada-salida.
omenclaturas: También se denota como X(z) ≡ Z{x(n)} y
Nomenclaturas:
También se denota como X(z) ≡ Z{x(n)}
y
Simplificación
de estructuras.
relación entre x(n) y X(z) se indica con:
relación entre x(n)
con:
zy X(z) se indica
Representaciones
más usuales
x(n) ←→ X(z)
z
←→
X(z)
onvergencia: Como la TZ esx(n)
una serie
infinita
de potencias,
Implementación de estructuras.
lo existe cuando se da la convergencia de la serie de potencias →
Convergencia:
Como
la TZ
es una serieROC).
infinita de potencias,
egión de convergencia
(“Region
of Convergence”,
Resolucion de ecuaciones en diferencias
efinida
por
el
conjunto
de
valores
de
z
que
hacen
X(z)
finita.
ólo existe cuando se da la convergencia de la serie de potencias →
∞
!
−n
=
|x(n)z | < ∞
Región deX(z)
convergencia
(“Region of Convergence”,
ROC).
n=−∞
Puente entre
el diseño analógico y digital
efinida por el conjunto de valores de z que hacen X(z) finita.
onsecuencia: Siempre que hablemos de una TZ hay que dar su (transformación bilineal e impulso-invariante)
OC.
Procesado Digital de Señales.4º Ingeniería Electrónica.
de València. Profesor Emilio Soria.
SignalsUniversitat
& Systems
Signals & Systems
X(z) =
∞
!
NTU-EE
NTU-EE
|x(n)z −n| < ∞
2
wS)Y =
" SX ("wS)X ( w)
x(n) = A "!sin#!(# " nSY+($
) (wH) =( j H" w)( j " w)
1
RXX (m) =
SX ( w)x(n)
" e jmw
%
=dw
A "=e#A" n" e# " n
2 " # j" ( w" n + # ) x(n)
x(n) = A " e $ #
!
!
! !
!
2
!
x(n)x(n)
= A "=sin
" n(#
+$
A("#
sin
" n) + $ )
SY ( w) = H ($
j " w) " SX ( w)
$
! !
j" ( w" nj"+(#w"
) n + #)
= A "=e A " e
x(n)
y n }= A=" e%de
x k Convergencia.
" hn#x(n)
{x(n)
Región
k & y(n) = % x(k) " h(n # k)
#"n
!
!
!
!
!
!
!
Ese
sumatorio puede converger
$
$
k= !
#$ !
$ k= #$
$
En
la
expresión
de
la
transformada
Z
x(n) = A " sin(# " n + $ ) { y } =
(o"x(k)
no!!!)
& ky(n)
= %=x(k)
h(n
#
k) para
= x%
" h(n
# k) determinados
%
n { yn }
k " hxn#
%
k k" h n#
aparece un !
sumatorio cuyos
límites
son
± !& y(n)
k= #$ k= #$
k= #$ valores
de la variable compleja z.
k= #$
j" ( w" n +!
#)
n
x(n) = A " e
x(n) = a " u(n)
Z-5
Definimos
la Región de Convergencia,
también conocida como R.O.C, de una
$
$n
n
x(n)x(n)
= adel
=" u(n)
aplano
" u(n)
transformada
a la región
complejo donde la transformada Z converge
{ y n } = % x k " hZ
n# k & y(n) = % x(k) " h(n # k)
! !
k= #$ $
Ejemplo
X (z) =
x(n) = a n
!
n= #$
%
!
n
=
k= 0
" u(n) " z #n "
=
!
!
X (z) =
!%
1
% r <1
1$ r
X (z) =
!
1!
11" a # z "1
%n
#n
=
%(
$
#n
$
n
n= 0
n= 0
$
n
"a " z
#1 $n
a " z #1
)
n
n= 0
#n
n
#n
n= 0
$
#1 n
#1 n
n= 0
"m
z-plane
1
1 r <1
r0 = n
%
n=
r < 1 r1 $=r n= 0 % r < 1
k= 0
1$ r
##
Unit circle
k= 0
1
X (z) =
1
Si
X (z)
1y"=asólo
# z "1 si
1 " a # z "1
1 " a # z "1
!
#n
n
n= 0
# R.O.C)1 $ r
#r
#n
n= #$
n= #$
XHay
a
"(z) =que recordar
nn= #$ !1 de
que (Condicion
k=
" 0
n
$
n
$
n
r =
!
$
a " u(n) " z = % a " z = % ( a " z )
%
X (z)X=(z)
" z "=z %=a " za "=z%=( a " z a) " z
!
%= a%" u(n)
a " u(n)
" u(n) !
%
%( )
n
#n $
$
!
$
k= #$
a
1
!e
R.O.C
!
Procesado Digital de Señales.4º Ingeniería Electrónica.
Universitat de València. Profesor Emilio Soria.
!
!
3
orm
e 10.2:
!
k= #$
k= #$
x(n) = a n " u(n)
!
$
$
$
%
%
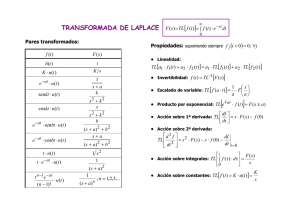
Región de Convergencia.
a n " u(n) " z #n = NTU-EE
a n " z #n =
! & SystemsX (z) =
Signals
n= #$
n= 0
n= 0
#
Z-5
k= 0
Si x(n) es finita la R.O.C es todo el plano
complejo excepto, posiblemente z=0 y
z"!
1
X (z) =
1 " a # z "1
"m
z-plane
z-plane
Unit circle
Unit circle
!
a
a
1
Procesado Digital de Señales.4º Ingeniería Electrónica.
Universitat de València. Profesor Emilio Soria.
Figure 3.4 Pole–zero plot and region of convergence for Example 3.2.
© Feng-Li Lian 2004
Signals & Systems
1
!e
R.O.C
|z|<a
) Propiedades.
La R.O.C no contiene ningún polo de la
transformada Z.
! Example 10.1:
"m
n
La R.O.C consiste en un anillo centrado
en el origen.
Hay que destacar que diferentes señales discretas
" misma transformada Z pero
pueden tener la
1
The z-Transformn
Z-6
r = R.O.C.
% r <1
diferentes
!
1$ r
!
%(
a " z #1
R.O.C
|z|>a
Figure 3.3 Pole–zero plot and region
of convergence for Example 3.1.
!e
Si x(n) es causal, x(n)=0 # n<0, la
R.O.C es el exterior de una
circunferencia cuyo radio se
corresponde con el polo de la
transformada Z mayor en valor
absoluto. Si es estrictamente
anticausal, x(n)=0 # n>0, es el interior
(un círculo) de la circunferencia con
radio igual al polo de menor valor
absoluto de la transformada Z. En otras
situaciones se tiene un anillo.
4
Signals & Systems
NTU-EE
NTU-EE
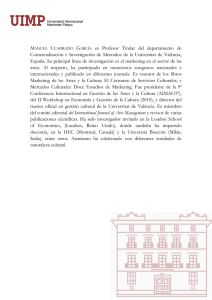
Summary of Properties
Propiedades
de la Transformada Z.
6/7
elec3600
Time domain
z-domain
ROC
ax1 [n] + bx2 [n] aX1 (z) + bX2 (z) ⊇ Rx1 ∩ Rx2
†
x[n − n0 ]
z−n0 X(z)
Rx
z0n x[n]
X(z/z0 )
|z0 |Rx
dX(z)
†
Differentiation
nx[n]
−z
Rx
dz
in z
Time-reversal
x[−n]
X(1/z)
1/Rx
∗
∗
∗
Conjugation
x [n]
X (z )
Rx
∗
∗
Symmetry
Im{x[n]} = 0
X(z) = X (z )
(real)
Symmetry
Re{x[n]} = 0 X(z) = −X ∗(z∗)
(imag)
Convolution
x1 [n] ∗ x2 [n]
X1 (z)X2 (z)
⊇ Rx1 ∩ Rx2
Initial value
x[n] = 0, n < 0 ⇒ x[0] = lim X(z)
Property
Linearity
Time-shift
Scaling in z
!
"
#
z→∞
$
%
Aquí el superíndice !indica que z=0 ò z=! pueden añadirse/eliminarse. 1/Rx hace referencia a
&
los puntos en los que 1/z pertenece a Rx
'
Procesado Digital de Señales.4º Ingeniería Electrónica.
Universitat de València. Profesor Emilio Soria.
5
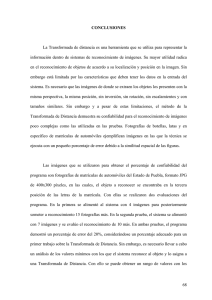
Transformadas Z comunes. z
TABLE 3.1
SOME COMMON -TRANSFORM PAIRS
Sequence
1. δ[n]
2. u[n]
3. −u[−n − 1]
4. δ[n − m]
5. a n u[n]
6. −a n u[−n − 1]
7. na n u[n]
8. −na n u[−n − 1]
9. [cos ω 0 n]u[n]
10. [sin ω 0 n]u[n]
11. [r n cos ω 0 n]u[n]
12. [r n sin ω 0 n]u[n]
13.
!
a n , 0 ≤ n ≤ N − 1,
0, otherwise
Transform
1
1
1 − z−1
1
1 − z−1
z−m
1
1 − az−1
1
1 − az−1
az−1
(1 − az−1 )2
az−1
(1 − az−1 )2
1 − [cos ω 0 ]z−1
1 − [2 cos ω 0 ]z−1 + z−2
[sin ω 0 ]z−1
1 − [2 cos ω 0 ]z−1 + z−2
1 − [r cos ω 0 ]z−1
1 − [2r cos ω 0 ]z−1 + r 2 z−2
[r sin ω 0 ]z−1
1 − [2r cos ω 0 ]z−1 + r 2 z−2
1 − a N z−N
1 − az−1
ROC
All z
|z| > 1
|z| < 1
All z except 0 (if m > 0)
or ∞ (if m < 0)
|z| > |a|
|z| < |a|
|z| > |a|
|z| < |a|
|z| > 1
|z| > 1
|z| > r
|z| > r
|z| > 0
Procesado Digital de Señales.4º Ingeniería Electrónica.
Universitat de València. Profesor Emilio Soria.
6
From Discrete-Time Signal Processing, 2e
by Oppenheim, Schafer, and Buck
Polos de la Transformada Z-Tipo de señal.
Existe una relación directa
)
{ ( )}los
) ( polos
entre
de la
transformada
)} ) ( Z y
) el tipo de
{ (
señal que da
lugar a dicha
)
transformada.
)
APLICACIÓN DIRECTA EN
EL DISEÑO DE SISTEMAS
DE CONTROL DIGITAL
FIGURE 6.4.3
(continued)
(
ZI I u nT
u nT z ! n =
=
n=0
1
z
=
1 ! z !1 z ! 1
z >1
!1
ZI I !u !nT ! T
u !nT ! T z ! n
=!
n = !(
" 0
%
= !$
z ! n ! 1'
$# n = !(
'&
(
zn =1!
=1!
FIGURE 6.4.3
n=0
1
z
=
1! z z !1
z <1
FIGURE 6.4.3
(continued)
Example
Although their Z-transform is identical their ROC is different. Therefore, to find the inverse
Z-transform
the region of convergence must also be given.
The Z-transform of the functions of u(nT) and –u(–nT – T) are
Procesado Digital de Señales.4º Ingeniería Electrónica.
Universitat de València. Profesor Emilio Soria.
© 2000 by CRC Press LLC
© 2000 by CRC Press LLC
© 2000 by CRC Press LLC
7
Otras peculiaridades:
Otras peculiaridades:
Transformada Z unilateral.
1. Retardo
temporal:
Si se designa el par secuencia discreta-
Transformada Z unilateral:
Esta transformada exige que las señales estén definidas
en −∞temporal:
<
Si1. Retardo
Transformada +Z unilateral por
la secuencia
esencausal;
n < ∞ Si
permitiendo
su uso
sistemasesto
quees
nox(n)
están
Si en reposo
z
x(n) ←→
X +(z)
# n<0
(condiciones iniciales #= 0).=0
Viene
definida por:Otras peculiaridades:
+
z
x(n) ←→ X +(z)
∞
!
1. entonces
Retardo temporal:
X +(z) =
x(n)z −n
Si entonces Se tienen entonces las siguientes
k
!
k
−k z ++
! x(−n)z n ]
propiedades.
z + z −k
x(nde
−
k)
←→
[X
El lı́mite inferior es la diferencia, siempre nulo, independiente
+(z)++
n
x(n)
←→
X
(z)
x(n
−
k)
←→
z
[X
(z)
+
x(−n)z
]
Se tiene entonces lo que se conoce
n=0
z+
que la señal sea causal (x(n) = 0, para n < 0) o no.
n=1
n=1
como Transformada Z unilateral.
entonces Retardo temporal.
2. Adelanto
temporal:
2. Adelanto
temporal:
k
!
+
Si
z
1. No contienen información sobre x(n) para n Si
< 0.
x(n − k) ←→ z −k [X +(z) +
x(−n)z n]
Algunas propiedades importantes:
Hay
que
destacar
cuando se tenga
2. Es única
sólo
para
señales que
causales.
z+
z+ X +
x(n)
←→
x(n) ←→ X +(z)
(z)n=1
este tipo de transformadas no hay que
entoncestemporal:
especificar la R.O.C ya que será
2. Adelanto
Adelanto temporal.
entonces
4. Como x(n)u(n)
es causal,
la ROC
k
siempre
el exterior
de de
unZ{x(n)u(n)}
círculo;Si y, por tanto,
!
z+
+
k
+
k x(n)z −n ]
la ROC de Z
{x(n)} es siempre
exterior
z [X+ (z) − !
+
evidentemente
ya que
sólo aseun cı́rculo. → CONx(n + k)z←→
k z+
−n
n=1 x(n)z
TRANSFORMADAS UNILATERALES NO ES NECESARIA
x(n
+
k)
←→
z
[X
−(z)
]
x(n)
←→(z)
X+
considera la parte causal de x(n)
3. Z +{x(n)} = Z{x(n)u(n)}.
LA DEFINICIÓN DE LA ROC.
Procesado Digital de Señales.4º Ingeniería Electrónica.
Universitat de València. Profesor Emilio Soria.
n=1
3.entonces
Teorema del Valor Final:
Si
3. Teorema del Valor Final:
k
!
+
+
z
z
+ X + (z)
Si
x(n)
←→
x(n + k) ←→
z k [X
(z) −
x(n)z −n]
entonces
z+
n=1
x(n) ←→ X +(z)
8
b0 z
+ b1z
+ ! + bM z
=
N in the
N !1 form
If the poles p1 , p2 , …, pN of a proper function F(z) are all different,
thenz we
F z
z3 expandzit
+
a
z
A
A+ ! + a N
+
1
1
unction
=
=
+ 2
z ! 2 z !1
z
is always a proper function. z ! 2 z ! 1
()
(
()
)( )
F Nz! M !1 A1
A2
AN
b0 z + b1z
+ ! + bM z =
+
+!+
(6.7.4)
=
(
6.
7.3)
Partial
Fraction
Expansion
z
z
!
p
z
!
p
z
!
p
N
N !1
1
2
N
z
+
3
z
!
2
z + 3 z !1
z
z
+
a
z
+
!
+
a
N
1
Transformada
Z inversa.
Métodos
(I)
F
z
Distinct
Poles
A2 = !4
A1 =
z=+53, A2 = A1
If the poles p1z, p!2 ,2…, zp=
function F(z)
we expand it in the
= z are
+! 1 dethen
!of1 aesproper
! 2alldentro
zdifferent,
where all Ai are unknown constants to be determined.
N
Aquí la integración
sobre
un
contorno
la
z
=
2
z
=
1
ction.
z by z ! 2 z ! 1 z ! 2 z ! 1
Se puede
demostrar
que
The inverse
Z-transform
of the kth
term of (6.7.4) is given
R.O.C de la Transformada ZF yz que contenga al origen.
( ) = A1 A+ A2 A + ! + AN
F ( z ) se puede
Therefore,
z
3
+
Esta
integración
calcular
de forma más
Expansion
z
z=! p1 1 z+! p2 2
z ! pN
=
n
#
z
2
z
1
z
!
!
z
2
z
1
!
!
usando
Teoría
Compleja
usando
(causal
) signal
# 1
'% % pk u nT sencilla
if ROC
: z (> de
pk )Variable
z
+
3
z
!
2
z
+
3
z(6.!7.5)
1
!1 %
NTU-EE
Lian 2004
Signals
&
Systems
Z $
=
where
all
A
are
unknown
constants
to
be
determined.
n
n
(
$
i
z
z
residuos;
veamos
este
cálculo
de
forma
mas
práctica.
n
AnT
=F!inverse
=
,f A
== 5signal
pN of a proper function F(z)
expand
in
the
pk all
z !1different,
zT =it5 Z-transform
!form
4: zof the
or5 term
nT
2 given
! 4by1
n " 0 = !4
%&1 !are
%) %– p thenu we
1The
2(6.7.4)
kth
of
is
!
if
ROC
<
p
anticausal
z ! 2z( z!+z23!) (1z !z 2!)1 k
& k
Expansión en fracciones
(z +z3)!(z2! 1)z ! 1
()
F z
N !1
N!2
(
(
( )( )
( )() )
)( )
( )( )
( )( )
( ) ( ) (
( ) ( (( ))
)( )
)
(
)
A =
(
( ) )(
( ( ) ( ( ) ))(( )
z =1
= 5 n, A2 =
2 – 3z + z2)
!#%with
2 z11!!,11!p<'%2 !,!z!#%…,
z ! 2case,
z !ROC
1all terms
F z is causal,
If
F(z)
=
z(z
+
3)/(z
>p 2,
following
exactly
nT In
if
: z the
> pksame
causalprocedure
signal)
If the signal
ROC
is
!z!
>
p
,
where
p
=
max{!p
!puthen
!}.
this
A1 the (b)
A
A
)
(
max
max
!
1
2
N
z = 2 ( k ) N(
z =1
Z $
=
=
+
+
!
+
(
6.
7.4)
( $
n
in (6.7.4) result
%&1 ! pk z !1 %) %– p u !nT ! T
z
zin!causal
pTherefore,
z signal
! p components.
z!p
if ROC : z < p anticausal signal
1
()
1
2
(
z=2
)
)= !4
)( )
N
(
&
( ) (
)( )
)
k
k
(
Therefore,
z
z
Example
Ejemplo
F
z
=
5
!
4
If the signal is causal, the ROC is !z! > pmax, where pmax = max{!p1 !, !p2 !, …, !pN !}. In this case
own constants to be determined.
z!2
z !1
2 – 3z + 2) with !z!in>(6.7.4)
n n
n
result
in
causal
signal
components.
z
z
(a)
If
F(z)
=
z(z
+
3)/(z
2
then
n
sform of the kth term of (6.7.4) is given by
z
z
F Example
z = 5F z = 5 ! 4 ! 4
or
nT= 5=25 2! 4 1! 4 n1" 0 n " 0
or ff nT
However,
the
pole
at
z
=
2
belongs
to
the
negative-time
sequence and the pole at z = 1 be
z
!
2
z
!
1
z!2
z !1
con R.O.C |z|>2
to the positive-time
n
(a) sequence.
If F(z)
= z(zHence,
+ 3)/(z2 – 3z + 2) with !z! > 2 then
#
2 – 3z + 2) with 1 < !z! > 2, then following exactly the same procedure
(b)
If
F(z)
=
z(z
+
3)/(z
'% % pk u nT
if ROC : z > pk 2 causal
Si+signal
la2)R.O.C
hubiese
sido
1<|z|<2
entonces
1
(b)
If
F(z)
=
z(z
+
3)/(z
–
3z
with
1
<
!z!
>
2,
then
following
exactly the same p
=
(
6.
7.5)
(
$
n
!1
1 ! pk z© 2000
%) by%CRC
$!4 1 n
– pPress LLC
u !nT ! T
if ROC : z < pk anticausal signal
nz" 0
& F kz
A
A
z +3
& z
=
= 1 + 2
F
z
=
5
!
4
f
nT
=
%
© 2000 by CRC Press LLC
z
z !z2 2n zn!#1z!1
z ! 2 z !1 z ! 2 z !1
!
5
&
the ROC is !z! > pmax, where pmax = max{!p1 !, !p2 !, …, !pN !}. In this case, all
F terms
z = '5
!4
Procesado Digital de Señales.4º Ingeniería Electrónica.
Universitat de València. Profesor Emilio Soria.
usal signal components.
However, the pole at z = 2 belongs to the negative-time
sequence
z!2
z ! 1 and the pole at z = 1 belon
9
Example
z +3 z ! 2
z + 3to zthe
! 1positive-time sequence. Hence,
()
()
( ) ( )
( ( )) (
(
A1 =
2
( )( )
(z ! 2)(z ! 1)
(
(
)
)( )
(( ) ) ( ) ( ) ( )
()
)
)
( () )
()
()
()
( )( ) = !4
To detrmine
of F(z)
= 1/(1
– 1.5z + 0.5zsequence
) if (a) ROC:
! > 1,
(b) RO
However,
= 2 belongs
to the
negative-time
and!zthe
pole
at
2) (the
zpole
! 1inverse
(z !the
) at zZ-transform
= 5 , A2 =
z=2
()
–1
z =1
n
–2
g =&
)
% E[ d (n) " d (n # 2)](
!
!
!
!
!
$ E[ d (n) " d (n # 1)] '
g =&
)
E
d
(n)
"
d
(n
#
2)
[
]
%
(
# 1&
g = a "% (
$ a'
!
# 1&
g = a "% (
$ 1 "a'
$1'
1
"1
$ a'
w = R #g =
#&
) # a #se
& )
! introducir de una manera
Este método de descomposición en fracciones nos permite
1 que
1 " a 2sencilla
%"a lo
(
%a(
conoce como respuesta natural y forzada de un sistema. Para ello consideraremos un sistema con
$ 1 "a
$ 1 ' respuesta impulsional del sistema h(n), su correspondiente
1
entrada "1x(n), su transformada
Z'es X(z),
w = R #g =
#
#
a
#
Y (z) = H (z) " X (z)
&
)
& )
transformada es1H(z),
salida1y(n)
" a 2 y %la"a
( con
% a (Y(z) como transformada. n
!
"1%
1
h(n)
=
(
u(n)
)
H
(z)
=
$
'
Ak
B
Descomponemos en
#Y2(z)
&n =
+ 1 * 0.5 k( z *1
n
Y (z) = H (z) " X (z)
" 1!
%
z1" p H (z )
" 1 %n
1 z " pX (z)
fracciones.
H (z)) H (z)
X (z)
h(n) = $ ' ( h(n)
u(n) )
="$1H%'(z)
(=
u(n)
=
*1
#2&
1 * 0.5
( zX
# 2 & ( u(n)
1=* 0.5 ( z *11
x(n)
=
)
(z)
$
'
El primer término se corresponde con la respuesta propia
y, como
indica no depende
#"31&%n su nombre
Ak
Bk
" 1 %n
1 *1 1 3 ( z *1
1
= $ ' ( u(n)
Yde
(z)la=entrada; depende
+ de las característicasx(n)
intrínsecas
del)
mientras
x(n)
=sistema
) X (z)que
= el segundo,
$ X '(z)(=u(n)
# 3&
z " p H (z )
z " pX (z)
1 * ( 1 3) ( z *1 1 * 1 ( z *1
# 3&
!
Transformada Z inversa. Métodos (I)
#
!
!
!
#
( )
#
( 3)
(z)
X (z) de X(z), tendrá una relación directa con dicha señal de entrada.
queHagrupa
a los polos
1
1
A
B
Y1(z) =
#
=
+
Ejemplo
11
A
B
11
A
"1=
"1 B
#
+="1
!Y (z) =
0.5
#
z
1
"
0.5
#
z
Y
(z)
#
+
"1 =1 " 1
"1# z
1
"
1 ""1 1 3
"1
"1
!
"1
0.5 # 3
z "1 11""( 1
11""( 0.5) ## zz"1 11"" 1
#
z
! 1 " 0.5 # z
1
)
0.5
#
z
1" ( ) # z
3
3
( )#z
n
"1%
1
h(n) = $ ' ( u(n) ) H (z) =
#2&
1 * 0.5 ( z *1
" 1 %n
1 !
x(n) = $ ' ( u(n) ) X (z) =
# 3&
1 * 1 3 ( z *1
( )
!
!
#
(3 )
Y (z) =
! !
3
2
33
2 2
"
Y
(z)
"
"1==
Y
(z)
"
"1
1
"1
1 " 0.5 # z
111""" (0.5
0.53)##z#zz"1 1 "1("1 )1# z "1# z "1
3 3
Y (z) =
3
2
"
1 " 0.5 # z "1 1 " 1 # z "1
( )
* # 1 &n
#* 1 &n - n
n
# 1 &n - n y(n) = , 3 " % ( ) 2 "*% (## /1"&&u(n)
2 'y(n) =,$, 3 '" % /.1( ) 2 " % #(1 /&" u(n)
,+ $ y(n)
= ,+3 " %$ 2 '( ) 2$"3%' /.( / " u(n)
!
$ '
$ '
1
1
A
B
!
YProcesado
(z) =Digital de Señales.4º"1Ingeniería
# Electrónica.
=
+
"1
1 # z "1 1 " 0.5 # z
1 de"València.
0.5 # zProfesor Emilio
Universitat
1 " Soria.
1 " 1 3 # z "1
3
( )
3
( )
!
!
!
,+
2
3
/.
10
(
!
!
!
!
H (z) = e
P ( BP(|AA| B)) =" P(A)
P ( B | A) " P(A)
P(B)
P
A
|
B
=
!
( )
P ( A | B) =
P ( A | Es ) "!P(Es )
f (0) P(B)
PP(B)
E s | A) =
(
f (x) =H$
(z) = e " x
!
n!
P ( A | E ) " P(E ) !
P( E | A) = # P ( Ek ) "!P( A | Ek )
P ( A | E ) " P(E )
! Z inversa. Métodos (II)
P( E | A) = f (0)
Transformada
k
!
#
n
n
"z "1
s
n=0
s
#
s
# Pk(E ) " P( A | E!)
k
Expansión en potencias de Z.
k
k
P ( A | E ) " P(E )!
n
f s(x) = $
!
n!
n
$
e" x = %
s
s
" xn
("1n=0
) ## xPn (Ek ) " P( A | Ek )
k
n!
s"z "1
La estrategia consiste en expandir la transformada
Z sen una serie de potencias
n=0
n
$de Z para,
"1
(
)
H
(z)
=
e
"1
"
x
n
s
seguidamente
igualar
esta=expansión
a la definición de Transformada
Z"1
e
=
#
x
%
H (z)
e"z
"z
!
n!
H (z) = en=0
!!
Ejemplo
# Taylor
n
El teorema
nos asegura
que
n
n
# de
!
n f (0)
$
$
n k
k
f
(0)
#
"1
n
n
"1
"1
(
)
(
)
n
"1
podemos
(x)= =descomponer
x ! funcione"z =
Se pide determinar la
f (0)
f f(x)
" x "cualquier
n =
#
z
#
f
(x)
=
"
x
$
n!
k
n
n
n!
n!
$
$ n!
sus derivadas n-ésimas en el
secuencia discreta que da f(x) usando
n=0n=0
n=0
n=0
n!
"1
n
"1
"1
(
)
(
)
!!
! !
e"z n=0
=%
# ( z "1 ) =%
origen de la siguiente forma.
lugar a la siguiente
n!
n!
n=0
n=0
transformada Z.
n
$
$
n
n
$
$
"1
(
)
#n
"x
n
"1
(
)
"1
"
x
n
"1
H
(z)
=
x(n)
"
z
e
=
#
x
"
x
n
e
=
#
x
$
%
!"z
!
e
=
#
x
!
n!
#n
n!
n=#$
n=0
!
n=0 = % x(n) " ( z )
H (z)
n!
n=0
!
n=#$
P ( E | A) =
# P(E$)$" P( A | E )
%% ( )
H (z) = e
Esta función no es racional
por lo que no se#
puede n
aplicar lo visto
!
anteriormente
f (x) = $
!
n=0
"z
n
$
"1
"1
"1 n
n=0
$
"n
n=0
H (z) =
n
n=0
% x(n) " (z )
#n
n=#$ $
H (z) =
"z
x(n) " z #n
nn
$
"1
"1 n
n=0
n=0
$
!
n
! !
% x(n) " (z11 )
#n
n=#$
$
n=0
$
H (z) =
(
( )
%
f (0)
("1) # z = ("1)
! ) # z ne x(n)
n ("1) # ( zn ) =%!("1
=
e " =x%
%= n! # u(n)
( ) % n!
)
$
$ !(
n
"1
"1
n!
n!
( ) # z "1 = ( ) # z "n
"z
e
=
n!
% n! ( ) % n! ( )
Procesado Digital de Señales.4º Ingeniería Electrónica.
Universitat de València. Profesor Emilio Soria.
$
( ) %
%
n
#
H (z) =
"1 2
Properties of the z-Transform
1 1
1" p # z )
(
H (z) =
H (z)
= = "1 21 2
H (z)
"1 "1 2
1"(1"
p # z1"
p
#
z
! Differentiation
in
p
# )z z-Domain:
( the
)
(
Z - 39
)
Transformada Z inversa. Métodos1(III)
z
G(z) =
=
"1
1"
p =# z 1) 1 ( z1 " =pz) z z
(
Otro método muy usado !
para! determinar
G(z)
=
! G(z) = G(z) =
=
!
p #)zp # )z("1
z"
p #(z1"
transformadas Z inversas se debe al uso de la (1"(1"
)(zp")(zp") p)
propiedad de la derivada de la transformada Z
"1
!
Ejemplo
dG(z) "1
1
dG(z)
=
z
#
p
#
"1 "1
dG(z)
dG(z)
1"1 12 1
"1
!
"z
#
=
z
#
p
#
!
The
Initial-Value
Theorem:
! "z
# = z #(1"
= #z p# #pz# ) "1
dz# "z dz
!
p
2
"z #
Determina la secuencia que da
lugar a la siguiente Transformada Z
dz
dz
(
(
)
(
) )
NTU-E
)
( (
!
2
"1 2
"1
1"
p
#
z
(
)
1" p #(1"
z p#z )
Aplicando
la propiedad de la derivada se tiene
1
1
n
n
1
$ n$#=g(n)
=pn=#nu(n)
pnn# #pu(n)
z "1 # pz#"1 # zp"1# z# "1p ## p 1# 2 $"11n$2# g(n)
n
#
n
#
g(n)
# u(n)
n
#
g(n)
=
n
#
p
#
u(n)
2
H (z) =
"1
"1
2
2
1"
p
#
z
"1 p # )z )
1" p1"
# z(p #(z1"
! !
(11" p # z "1!)
© Feng-Li Lian 2004
Signals & Systems
!
H (z) =
2
1 1
Para ello nos
en la
"1
1" pbasaremos
# z "1
"1 1
1
z
#
$
# pnn"1
#n"1
u(n)
"1
n"1n
2
z
#
$
#
p
# u(n)
"1
n"1
"1
2
z # z #
$
n
#
p
#
u(n)
propiedad de la derivada usando
$
n
#
p
#
u(n)
"1
2
1"
p
#
z
(
1"
"1 2p # )z )
Properties of"1
the(z-Transform
1
z
!
1"
p
#
z
1"
p
#
z
!
! la siguiente
G(z) =transformada
= Z. !
"1 !
Aplicando
la propiedad del retardo temporal se tiene
(11" p # z ) z (z " p)
1 1
n
n
$ ($
n +1
#
p
#pu(n
+1)+1)
)
2
n
+1
#
# u(n
G(z) =
=
1
(
)
n
1
"1
2
"1
n
"1( n +1) # p # u(n +1)
p # z2p($
1" p # z
(1" $
( z " p)
n# )z+1
) ) # p # u(n +1)
"1
! ! 1""1p #2(z1"
1" p # z
!1
dG(z)
Procesado Digital de Señales.4º
Ingeniería Electrónica.
"1
!
València.
! Universitat de "z
# Profesor Emilio=Soria.
z # p#
"1 2
dz
12
1"
p
#
z
(
)
dG(z) "1
1
! !
"z #
= z # p#
2
"1
1
dz
( (
!
"1
)
(
(
) )
) )
Z - 40
1
"1
1
z
#
p
#
$ n # g(n) = n # pn n # u(n)
"1
! Time
Shifting:
2
z # p # 1" p # z "1 2 $ n # g(n) = n # p # u(n)
( p # z "1 ))
(1"
!!
1
"1
n"1
1
z
#
$
n
#
p
# u(n)
"1
n"1 Z.
Análisis de sistemas L.T.I usandoz la
Transformada
2
#
# u(n)
"1 2 $ n # p
(1"pp#la#zz"1Transformada
)
Por el momento no hemos aplicado al análisis de sistemas discretos
Z. La manera de
1"
(
)
!
!
enlazar el análisis de los sistemas discretos con la transformada Z va a venir dado por dos propiedades
n
11
$
n
+1
#
p
n # u(n +1)
(
)
2
"1 2 $ ( n +1) # p # u(n +1)
"1
1"
p
#
z
( p#z )
1"
"#$%&$'($)*$%!!"" +&%*,--,)./%0$1$00$2%3,%4&%+-5(.&$%
0$&5,)&$ ,1%3#$%6"7%&/&3$-8
LTI
system
δ[n]
1
h[n]
(
!!
n
n
y(n)=x(n)!h(n)
9)%+-5,034)3%50,5$03/%,1%*,):,.(3+,);
© Feng-Li Lian 2004
!!
Y(z)=H(z)$X(z)
!!
N
N
!
Procesado Digital de Señales.4º Ingeniería Electrónica.
Universitat de València. Profesor Emilio Soria.
P
s=o
s=o
Aplicando la propiedad se tiene (condiciones
NTU-EE
iniciales=0)
N
P
(
P
%% N
#k(
#s
#k * = X(z) " $ b " z
#s
Y
(z)
"
1#
a
"
z
'
$
Y (z) " '1# $ ak k" z * = X(z) " $ bs s" z
k=1
s=o
&& k=1
))
s=o
© Feng-Li Lian 2004
La transformada Z de la respuesta
impulsional va a ser el elemento
que nos va a servir para analizar los
!!
sistemas L.T.I discretos.
P
y(n)== $aak" "yy(n(n##kk) )++$bbs" "xx(n(n##s)s)
y(n)
$k
$s
k=1
k=1
Signals & Systems
! 3#$%!"#$" +)%<#+*#%3<,%&$'($)*$&%40$%*,):,.:$2%+&%
()+-5,034)3=
)
Una forma usual de describir un sistema discreto
es mediante una ecuación en diferencias.
P
Signals & Systems
$b
#s
"
z
s
H (z) =
Y (z)
= s=oN
(
X(z) %
#k
'1# $ ak " z *
& k=1
)
13
Análisis de sistemas L.T.I usando la Transformada Z.
Causalidad.
P
P
La transformada Z de una señal estrictamente causal,
vale
#s 0 para
bs " z
bs " z #s
$
n<0,
es
el
exterior
de
una
circunferencia.
“Un sistema es causal
Y (z)
s=o Y (z)
s=o
H (z) =
= H (z)
=
=
N
la Transformada
es
si cumple que h(n)=0 Un sistema es causal si la R.O.C deX(z)
%( elN
(
%
X(z) Z
#k
#k 1#
' $ ak " z *
'1# az=!
exterior de una circunferencia; incluyendo
# n<0”
k "z *
&) k=1
)
& k=1
$
$
Estabilidad.
Un sistema discreto es estable BIBO si ante cualquier
entrada acotada la salida permanece acotada. Se ha visto
que Y(z)=H(z)$X(z). Si se factoriza esta expresión!se tiene
A
k
Yk(z) = $
+ O(X(z))
A
"1 n
pk # z )
Y (z) =!$
+(1"
O(X(z))
"1 nk
k (1" pk # z )
De X(z) no me preocupo (¿?) si me fijo en la parte de H(z) y aplico
g(n) = p n " u(n)
Transformadas Z inversa (recordando que según los polos sean simples no no
g(n) =!p " u(n) g(n) = n s#1 " p n " u(n)
se tiene )
!
s#1
n
g(n)
=
n
"
p
" u(n)
Así pues si se busca una salida acotada la única forma es que |p|<1 (¿y si |p|=1 que pasaría?).
Un sistema es estable si la Transformada Z de la respuesta
impulsional tiene
!
todos los polos dentro de la circunferencia de radio unidad (cualquiera que sea
su orden de!multiplicidad).
Procesado Digital de Señales.4º Ingeniería Electrónica.
Universitat de València. Profesor Emilio Soria.
14
From Transfer Function to Difference Equation
••InInimplementing
a adigital
filter
inin
software
on,on,
say, a DSP,
each
digital
filter
software
a each
DSP,
each
element
requires
execution
time or
• implementing
In
implementing
aadditional
digital filter
in software
on,memory.
say, say,
a DSP,
element
requires
additional
time
memory.
element
requires
additional
execution
time
or
memory.
element
requires
additionalexecution
execution
time
orormemory.
Computational
Elements
• An examination of the number of elements provides some meaAnálisis
de sistemas
L.T.I
usando
laofthe
Transformada
Z. provides
Estructuras.
putational
Elements
sure
of the ‘cost’
ofthe
the
system.of
••An
ofof
number
elements
provides
some
mea•examination
An
examination
the
number
ofof
elements
some
meaAn
examination
number
elements
provides
some
mea2/7
3/7 3/7
elec3600
elec3600
requires
additional ‘real
estate’filter
in the
• In implementing
a digital
in design.
software on, say, a DSP, each
elec3600
elec3600
we were
to
implement
digital
filter
in
VLSI
(a(aVery-Large-Scale
weIfwere
were
implement
digitalfilter
filter
VLSI
(a
Very-Large-Scale
IfIfwe
totoimplement
a adigital
in in
VLSI
Very-Large-Scale
3/7
Circuit)
then
each
adder,
multiplier
and
delay
element
IfIntegrated
we were
to
implement
a digital
filter
in VLSI (a
Very-Large-Scale
Integrated
Circuit)
then
each
adder,
multiplier
and
delay
element
Integrated
Circuit)
then
each
adder,
multiplier
and
delay
element
3/7
requires additional
‘real estate’
in the multiplier
design.
Integrated
Circuit) then
each adder,
requires
additional
‘real
inin
the
design.
requires
additional
‘realestate’
estate’
the
design. and delay element
elec3600
elec3600
elec3600
In the design
of a discrete-time
filter,
we will
seeanalizada
that this can
La transformada
Z permite
la sure
La
primera
en ser
es 2/7
labeque se conoce como forma
of
‘cost’
of
thesystem.
system.
of
the
‘cost’
ofof
the
•sure
Given
athe
rational
transfer
function
sure
of
the
‘cost’
the
system.
done conveniently
anwe
LTI will
system
with
a rational
transfer
e design of a discrete-time
filter,
see
that
this
can
belafunction.
directa
I;
aplicando
ecuación
enb1diferencias
tiene
implementación
deaslos
−M
b0 +
z−1 + · · · + bse
•
Given
a
rational
transfer
function
Computational
Structures
Mz
••Given
a aY
rational
transfer
function
Given
rational
transfer
function
=
H(z)X(z),
H(z)
=
,
(z)
onveniently as an
system
with
a rational
transfer afunction.
• LTI
We already
know
we can represent
difference equation
−1 + · · ·
−N
−M
sistemas
discretos
de that
a00 +
+b
a11zz−1
aM
b
·
·
·
+
b
Nz
−1+−1
−M−M
b1b
z1 z + ·+· ·· ·+· b+MbzM
,
Y
H(z)
= b0b+
(z) = H(z)X(z),
+
which
is
initially
at
rest
as
an
LTI
system
with
a
rational
transfer
0
−1 + · · · +equation:
−N z ,
!
YY
==H(z)X(z),
H(z)
==
(z)
Direct
Form
I
we
can
write
this in the time
domain
asaa1 zdifference
a
+
a
z
diferentes
formas
0
N
H(z)X(z),
H(z)
(z)
−1 −1
−N −N ,
already know that
we can represent a difference equation
a0a+
a
z
+
·
·
·
+
a
z
1
N
function.
a1 z + ·equation:
· · + aN z
0+
"!
we acan
write
this
inathe
time
domain
as
a+
difference
(estructuras).
Los
elementos
y[n]
+
·
·
·
+
y[n
−
N]
=
b
x[n]
·
·
·
+
b
x[n
− M].
0
N
0
M
ch is initially at rest as an LTI system
with
a
rational
transfer
we
can
write
this
in
the
time
domain
as
a
difference
equation:
From
the
recursive
form
of
the
difference
equation,
it
becomes
relawrite
this
in the
time
domain
as+ a· ·difference
equation: #"
• In the design of filters, we we
firstcan
derive
the
function
a
+ · transfer
·write
· + athis
−
N]
=and
b0 x[n]
· so
+ bthat
básicos
en
estas
estructuras
0 y[n]
N y[n
M x[n − M].
•
We
can
then
as
a
recursive
equation,
Elements
ction.
tively easy
to see
the
system
could
be constructed
from
adders,
work back to the difference
equation.
a
++how
· ·· ·· +
aN
y[n
−−
N]N]
==
b0b
x[n]
+ ·+··· ·+· b
x[n
− M].
0 y[n]
Mb
2/7 a
y[n]
·
+
a
y[n
x[n]
+
x[n
−
M]. $#
son los siguientes
0
N
0
M
•
We
can
then
write
this
as
a
recursive
equation,
so
that
1
multipliers
and
delay
%$
ete-time
filter,
will
seeimplement
that
this derive
can
be the equation,
(belements.
+elements:
· · · + bM x[n − M]
y[n]we
=
• To
a difference
need
three
0 x[n]
he
design
ofwe
filters,
we
first
transfer
function
and
Sumador
••We
can
then
write
this
as
a
recursive
equation,
so
that
a
0
1
We can
then
write
this as a recursive
equation, so that
TI system with a rational transfer function.
&%
(b
bM1is:
x[n −
− 1]
M]−!· · · − aN y[n − N]).
y[n]
=
0 x[n] + · · · +
•
The
Direct
Form
I
construction
k back to the difference xequation.
−a
y[n
[n]
2
1 1a0
'&
"
t we can represent a difference
equation
++
· ····+
bMb
x[n
−1]
M]
y[n]
== (b(b
"· · 0· − aN y[n − N]).
0 x[n]
−a
y[n
−
−
1
x
[n]
x[n]
·
+
x[n
−
M]
y[n]
1/a
b
a
1
0
0
M
! we need
!
! a0elements:
!!!"$
!"! #
$
&
%'(
#+%
&'(
#+%
&'(
!!"$
!
!
mplement
a difference
equation,
three
+
•
st
as an LTI system
with a rational
transfer
'
a0x[n] •" ! z−1 ! x[n
#
"
x1 [n]
+x2 [n] x[n]
ax[n]
−
1]
#
#
x[n]
y[n]
−a1 y[n − 1] − · · · − aN y[n
− N]).
−a1 y[n
! − 1]$ − · ·z·−1− aN y[n − N]).
Addition
Multiplication
z−1 Delay
x2 [n]
Multiplicador
(cte)and
s, we " first derive the
transfer function
b! 1 !!"$
%$ 1 •
!"$
#+%
&'($ −a
#+%
&
'( these
"
•
•
The
z-transform
offers
insight
into
possible
arrangements
of
x
[n]
rence
equation.
a
1
"
"
!"! #
$
%'(
!
!
!
!
!
#
#
+&
&
z−1
elements.
#
+x2 [n]
x[n]
ax[n]
x[n]
x[n
z−1 − 1]
z−1
ence equation,
we need
three elements:
'
Addition
Multiplication
Delay
$
!
Retardo.
bM−1
"
!
!!"$
$
#+%
&'($ −aN−1
#+%
&'( % !"$
•
•
a!
z-transform
offers ! insight
into
possible
arrangements
of
these
!
!
"
"
z−1
#
#
#
n]
ax[n]
x[n]
x[n − 1]
&
ments.
z−1
z−1
Multiplication
Delay
$
−a$ N
bM
Procesado Digital de Señales.4º Ingeniería Electrónica.
'
!
%
Universitat de València. Profesor Emilio Soria.
s insight into possible arrangements of these
15
• However,
this not the only possible realisation.
&
'
4
!
"
#
$
%
&
'
!
"
#
$
%
&
'
Integrated
Circuit) then
adder,
multiplier
and delay element
requires
additional
‘realeach
estate’
in the
design.
Ak in the design.
requires additional ‘real estate’
$
Y (z)requires
=
+ O(X(z))
element
additional
"1 sexecution time or memory.
elec3600
!
$
• In implementing
a digital filter+ in
software on, say, a DSP, each
Y (z) =
O(X(z))
"1 in
s software on, say, a DSP, each
• element
In implementing
a
digital
filter
Akpk # z )execution time or memory.
(1"
requires
additional
k
# z number
)
! • An examination
of elements provides some meak (1"ofpkthe
• An examination of the number of elements provides some mea-
Direct Form II Análisis
sure
of the
the‘cost’
‘cost’
system.
n ofof
sure of
thethe
system.
g(n) =lanpTransformada
" u(n)
de sistemas L.T.I
usando
Z. Estructuras.
•• Given
rationaltransfer
transfer
function
Given aa rational
function
La siguiente es la que se!
conoce
g(n) = p "s#1
u(n)
n
−1 + b z −M
g(n)
=
n
"
p
"
u(n)
b0 +bb01 z
+−1b+
·M
· · + bM z−M
1 z· · · +
s#1
n
Y (z) = H(z)X(z),
H(z) =
,
z−M W (z),
.
−N
W (z) =
( (
elec3600
To see another possible realisation, write !
,
Yg(n)
(z) =
= nH(z)X(z),
" p " u(n) 5/7H(z)a=
−1 + ·−1
−N
−N
+
a
z
·
·
+
a
z
0
1
N
como
forma
directa
II
o
canónica
a
+
a
z
+
·
·
·
+
a
z
ealisation,
0
1
N
! write
"
X(z)
−M
!
5/7
we can
can write
this
thethe
time
domain
as a difference
equation:
1 in
. in
Y (z)
+ bM zII W (z), W (z) = we
write1
this
time
domain
as a difference
equation:
0 + · · · Form
" = bDirect
−N
X(z)
a0 + · ·w(n)
· + aN=z
" x(n) # a " w(n #1) + ...# a " w(n # N )
)
)
elec3600
elec3600
"
1 = #1)
# a−1 "N]
w(n
+ ...#
" w(n
# N−) M].
a0w(n)
y[n] =
+ · · ·"+x(n)
aN y[n
b0 x[n]
+ ·a·N· +
bMNx[n
a
a
y[n]
+
·
·
·
+
a
y[n
−
N]
=
b
x[n]
+
·
·
·
+
b
x[n
−
M].
a0an
+
·intermediate
·· + a
0
0
M
a0 0save N
To see
another
possible
realisation,
Nz
#
• By calculating
w[n]
as
step,write
we can
actually
5/7
!
•
We
can
then
write
this
as
a
recursive
equation,
so
that
! weelements
"!
onintermediate
the number of
delay
required.
$
X(z)
s an
step,
can actually
this as a recursive equation, so that
−M save• We can then write
.
Y (z) = b0 + · · · + bM z
W (z), W (z)
= =1=
y(n)
b
"
w(n)
+
...+
b
"
w(n
#
M
)
y(n)
b
"
w(n)
+
...+
b
"
w(n
#
M
)
0+ 0
M − M]
%
a0(b
· · ++
aN
y[n]
= M):
· ·z·−N
+M
bM x[n
ay• elements
0·x[n]
This leadsrequired.
to the Direct Form II realisation (here,
N=
1
a0
(b0 x[n] + · · · + bM x[n − M]
y[n] =
&
• By calculating
as an intermediate step,awe
can
actually
save
−a
− 1] −
· ·utilizar
· − aN y[n − N]).
ct Form II realisation
(here, w[n]
N =w[n]
M):
1 y[n
0
Esta
estructura
se
basa
en
!
b! 0! !"! #
on the number
of
elements
! 0 delay
!
!"! $
#+%
&'( 1/a
$+%
&'( required.
•
−a y[n − 1] − · · · − a y[n − N]).'
1 la variable
los retardos de
"
w[n] x[n]
$
$
y[n]
b! 0 leads
• This
M):
! II realisation (here, N =
! 0
! z −1 Form
$
#+%
&(' 1/a
!"! #
$+%
&'( to the Direct
intermedia,
w(n) a la hora de
•
"
$
$
y[n]
−a
b
# 1
!1
!"$
#+%
&'(#
!"! #
$
&'(
!
w[n]
•
calcular la salida
del sistema y(n).
+%
−1
"
$
$
z
1/a
b
0
0
!!"$
!
!
!!"#
!
#%
&'(
$+%
&'(
•
" traduce en un ahorro
−1+
Este
hecho se
"
−a
b
z
1
1
$
$
x[n]
y[n]
#
!
$
#+%
&'(#
!"! #
$+%
&'(
!
•
−1
!
z
"
$
$
z−1
#
$
#+%
&'(# −aN−1
$
−a# N
•
"
z−1
•
#
!"$
#+%
&'(# −aN−1
$
bN−1
!
"!! #
$+%
&'(
$
−a# N
−a
!"$
#+%
&'(b
# N−1
# 1
!
"!! #
$+%
&•"'(
• $
"
$
z−1
z−1
bN
!
−a
N−1
#
!"$
#+&
%'(#
•
$
Procesado Digital de Señales.4º Ingeniería Electrónica.
N
Universitat
de
València.
Profesor
Emilio
Soria.
!
b
−a# N
•
"
z−1
•
b! 1 "
#
$
bN−1
! %
&
bN
! '
$+%
&'(
!!"#
$
!!"#
$+%
&'(
$
en el número
de retardos
#
!
necesarios para
$ la implementación
del sistema% discreto "de tal forma
que esta estructura
es #la que menos
&
retardos
necesita.
$
'
%
&
'
N
16
Ak
+ O(X(z))
"1 A
s
k
Y(1"
(z) =p$
+ O(X(z))
k #z )
"1 s
Y (z) = $
!
Cascade
Form
Cascade Form
!
k
(1" pk # z )
k
Yet
ispossible
possiblewhen
when
H(z)
is factorised
as (again
Yetanother
anotherrealisation
realisation is
H(z)
is factorised
as (again
6/7
assuming
M
L.T.I
usando
la Transformada
Z. Estructuras.
assuming
M=
= N):
N):
n
Análisis de sistemas
g(n) = p " u(n)
n
g(n) = p " u(n)
Yet another realisation is possible when H(z) is factorised as (again
ck z−1
b
b0
1 −1ck−
z−1
Otra posible estructura es en
6/7
assuming M = N):
H(z)=
=
H11(z)
HknH
= =n
.
(z),
(z)
·····HH
.
H(z)
(z)·!
(z),
(z)
NN
ks#1
−1 −1
s#1
a0
1
−"1d
a
−
g(n)
=
n
"
p
u(n)
k zdk z
cascada; si la función de
b0
1 − ck z−1
H(z) = H(z)
H1 (z)se
· ·puede
· HN (z),
. form:
ThisH
leads
to a
a cascade
k (z) =
• •This
leads
to
form:
transferencia
Aplicando una estructura
a0
1 − cascade
dk z−1
g(n) = n
b0 /a
! 0
!!"$
#+%
&'(
b0 /a
0
#+%
&$ (' HN (z)
!!"$
x[n] !
x[n]
$
!!"#
$%
&'(
!"$
#%
&'(
H1 (z)
b0 /a
! 0
x[n]
Parallel
Form
Parallel
Form
!!"$
#+%
&'(
$
•
+
"
z
+
$
−1
1 HN (z)
w(n)
=
#bloque
a1 " w(nse
#1) + ...# a N " w(n
HN (z)
canonica
cada
1 !"$#%&'( a "a( x(n)
"
!
$
#
&
%
(
'
!
"
!
$
#
&
%
(
'
!
!
• w(n) +
• " w(n #1)
+!"$
+ !"! #
=
" x(n)
+
"
$+%
&'(
!!"$#
#+%
&'( 0# a
$+
&y[n]
%
'( ...# a N! " w(n
1
tiene
•"
•
$
$
!
"
"
y[n]
$ a
$
$
z−1 !"! #
z−1
! 0
$+%
&'(
−1
−1
wk (n) =dx#Nk (n)• +zd−ck ! N" wk (n #1)
z
$ −c1 y[n]
!
•
H1 (z)
factorizar
detolaasiguiente
forma
• This leads
cascade form:
$
!
•
"
d
#1
" p " u(n)
elec3600
!
6/7
elec3600
Cascade Form
H1 (z)
−1
Form
d
−c! 1
zParallel
#1
−cN•
(
dN
−cN
• That is, for conjugate pairs of zeros,
= ck , andH
poles,
dk+1 H
=k+1 (z)$to Hobtain
∗
k+1 combine
d∗
, cwe
and
k (z) pairs
1 (z)
kof
•
That
is,
for
conjugate
of
zeros,
c
=
c
, and poles, dk+1 =
• This leads
directly
to
the
parallel
form
implementation:
k+1
k
∗
En estas dos estructuras, en el caso de tener
!
• This leads directly
to the parallel
dk , we combine
Hk (z) andform
Hk+1of
to obtain
(z)
A" 1
∗ implementation:
#+%
&'(
$+%
&'( %
"!"$
• H !"" #
• obtain
2
−1
d
,
we
combine
Hk (z)
and
to
(z)
# + |c | z −2
k+1
1
−
2
Re
}z
!
! {c
x[n]
k
k
k
H
(z)
1
polos complejosH1se
asocian
por
pares
2
−2 (z) !
=
.
k,k+1
(z)1 − 2Re{ck }z−1 + |ckH
| z
z−1
& −1
2 −2
A
2
1
−
2
Re
{d
}z
+
|d
|
z
H
=
.
1
(z)
−1
k
d$ 1 }z
k,k+1
"
#+%
&2'( −2
$
&'(
"!"#
"
"!"$
•
•− 2A
1 − 2Re{c
+k|ck | z−2
+%
−1
k
conjugados
para
dar
estructuras
de
orden
2.
1
Re
{d
}z
+
|d
|
z
1
#
'
k
k
#+%
&'(H
"
$+%
&'( !
"!"#
"
"!"$
! k,k+1
y[n]
x[n]
=
.
(z)
•
•
2 −2
#
−1
!
!
!
−1
y[n]
x[n]
1 − 2Re{dk }z + |dk | z
z
De forma “encubierta”
estamos aplicando
d$ 1z−1
propiedades dedla
$ 1 convolución (asociativa y
distributiva para ser exactos).
HN (z)
"!"$
#+%
&'(
!
•
#
d$N −1
z
•
#
z
−1
HN (z)
•
#
A" N
! z
!" d$
"#
• Again, complex conjugate poles should be combined.
#$
$%
−1
N
Procesado Digital de Señales.4º Ingeniería Electrónica.
Universitat de València. Profesor Emilio H
Soria.
N (z)
"!" $
#+%
&'(
!
"!" $
#+%
&'(
!
y[n]
"
A" N
A" N
17
elec3600
d#N
−c! 1
elec3600
elec3600
#
• " w ! (n #1)
y
(n)
=
w
(n)
#
c
!
k
k
k + adrational
•
•
y
(n)
=
x
(n)
"
c
#
x
(n
"1)
Under certain
conditions,kwe have found
that
can
write
kzeros
k their
k wekcomplex
k # yk (n !"1)
certain
conditions,
we have
found
that
we
can
write
arational
rational
• We
combine
complex
and poles with
con!
UnderUnder
certain
conditions,
we have
found
that
we
can
write
a
7/7
transfer function in a partial
fraction expansion:
7/7poles
!
7/7
•
We
combine
complex
zeros
and
with
their
complex
contransfer
function
fraction
expansion:
jugate
pairs
tofactorizar
avoid
implementing
arithmetic in hard! complex
"
• Wein
combine
complex
zeros
and
poles
their
complex
contransfer
function
a in
partial
fraction
expansion:
Estructura
ena partial
paralelo;
ahora
H(z)
sewith
puede
de la siguiente
forma
Ak
H(z)in
=hardH1 (z) + · ·y
·+
HNcomplex
=+ d " y −1
(z),
ware.
jugate
pairsarithmetic
to
implementing
arithmetic
hard- #
= Ak " xHkk(z)
(n)
(n.in#1)
jugate pairs to avoid implementing
complex
"
Akavoid
k"(n)
1 −k dk zk
!
A
k
.
H(z)
=
H
+
·
·
·
+
H
H
=
(z)
(z),
(z)
1
N
k
ypairs
=zeros,
Ak "#parallel
xck+1
" ypoles,
H(z) = ware.
H1 (z) + · · · + HN (z),
H
. leads
(z) =
kThat
•ware.
is, for
conjugate
of
=form
c+k∗ ,d
and
dk+1 =
1−
d•zkThis
z−1
directly
to the
of
k (n)
k (n)
k implementation:
k (n #1)
#
−1
!
$
1−
d
∗ k
d# 1
%
&
'
!
"
#
$
%
&
'
$
%
&
'
( )
( )
( )
1" 3 # z
# z ) X (z) =
1 * x(n)(=z 1
$ "' (3u(n)
3
*1
(
z
#
&
3
1*
3
2
3 3
2
Y
(z)
=
"
Y (z) =
3 "1 "
2
1 "A0.5 # z "1 1 "B 1 # z "1
Y (z) =
"1 " 1 1 #!z "1 1
1 " 0.5Y#(z)
z "1
3
=
+
1 " 0.5 # z = A 1 " 13"1 ## z "1B1
"1
! 1
"1
1
!
1
1 " 0.5 # z 3 1 "
1 " 0.5 # z 1 1 "
#z
# z "11
!
Y (z) =
#
=
+
3
3
=
!
1 # z "1 Y (z)* = # 1 &n
"1
# 1# &n - 1
1 " 0.5 # z "1 1 " 1 * # z "1 n 1 " 0.5 # z "1
"1
n - 1" !
1
"
0.5
#
z
1
"
#
z
3 * #1& n
3
,
/ 3
# &
2 y(n) = 3 " %$ 2 (' ) 2 " %$ 3 (' " u(n)
& ) 2 " % #11(3&n/-" u(n)
, 3," % #Y1( (z)
y(n)
=
,
/.
=
"
!
+
y(n) ,= 3$"2% ' ( ) 2$" %3 ' ( //"1
" u(n)
"1
1
1 "$0.5
#
z
! !3
+2,+ $ 2 '
.
1"
#z
3 ' /.
3
2
3
Y (z) =
" !
"1
Y
(z)
=
"
"1
Se puede relacionar el “mundo digital”
con
el
“mundo
analógico”
relacionando
las
Transformadas
más
1
A
1 " 0.5 # z
1" 3 # z
H ( p) = 1 " 0.5 # z "1 1 " 1 # z "1
!
A
n
n
*
3
utilizadas en esos dominios como son la Transformada
y la Transformada
dos
#1&
#!
& Laplace; existiendo
p+b
1de
HH
( p)( p)
= = AZy(n)
,
/
=
3
"
)
2
"
"
u(n)
%
(
%
(
!
bson
formas de hacer este cambio. *Estas
transformaciones
n
n- p+
p+
b las,+ que
$ 2 'se conocen
$ 3 ' /. como Transformación
!
#
&
#
&
1
1
!
* # 1 &n
!
# 1 &n = , 3 " % ( ) 2 " % ( / " u(n)
bilineal y Transformacióny(n)
impulso-invariante.
#b"
t
( 0) 2 " % ( / " u(n)
h(t)y(n)
= A=" e, 3 " % t >
$ 3 ' /.
,+ $ 2 '
!
A
$
'
$ 3 ' /.
2
#b"
t t
,
#b"
+
!!
h(t)
= =A A
" e" e H t( p)
>
00
Impulso-invariante.
h(t)
t >=
p+b
h(n "T ) = A " e#b" n"T " u(n)
!!
A
!
El bloque básico de análisis
de=sistemas lineales continuos#b"#b"
usando
transformadas
H ( p)
n"T
A
h(n
"T"T
) =) =A A" e" e n"T
" u(n)
h(n
" u(n)
H ( p) =
p
+
b
de Laplace es el
definido
por
(es
análogo
a
lo
que
ocurre
en
procesado
digital!!!!).
!
p+b
!
h(t) = A " e#b" t t > 0
!
!
!
!
A
La transformada inversa
Si se
! " u(n) H (z) =
#b" t
h(n "T ) = A " e#b" n"T
h(t) = A " e
t>0
#b"#t z "1
1 "Ae""b#T
AA
de H(p) viene !
dada por
muestrea
h(t)
=
e
tz>"10&
#
!!
H
(z)
=
H (z) =
T
1
+
"b#T "1"1
"b#T
! 1"
1"
!
H (z) = %
(
e e # z# z
h(n "T ) = A " e#b" n"T " u(n)
#b""1
n"T
Transformación bilineal.
2
1
"
z
h(n
"T
)
=
A
"
e
$
'" u(n)
A
!
H (z) =
!
"1
+x(n
x(n
1)))
Ahora el paso es comparar el operador
1x(n)
"(n)
e"b#T
# z!
(
x
+
""1)
!
(
A(n)
=
A(n
"
1)
+
#T
A(n) = A(n " 1) +
#T
!y en
A
“integrador” en!el mundoHanalógico
2
!
(z) =
2
A
!
1 "es
e"b#T
el digital; en el analógico H(p)=1/p
un # z "1
"1
H (z) =#
2 11 "
z"b#T& # z "1
!
"
e
!
integrador; ¿qué sistema digital hace una
p= %
T " X (z)
#1
#1
"1 (
T
"
X
(z)
A(z)
"
1
#
z
=
"
1
+
z
#1
#1
T $1 + z '
operación semejante?. Para determinarlo
A(z) " 1 # z =
!
2 " 1+ z
!
2
de forma sencilla
! hay que plantearse el
significado de la integral: área encerrada
T # 1 + z "1 & !
x(n) = $ ' ( u(n) ) X (z) =
# 3&
1* 1
( )
( ( ))
( )
( )
( )
( )
( )
Análisis de sistemas L.T.I usando la Transformada Z.( )
( )
((
( )
))
H (z) =
por una curva y el eje de abcisas
!
!
Procesado Digital de Señales.4º Ingeniería Electrónica.
((
))
%
(
2 $ 1 " z "1 '
!
Universitat de València. Profesor Emilio Soria.
18
!
( )
2 # 1 " z "1 &
p= %
(
(