Elementos de Dinámica Estructural
Anuncio

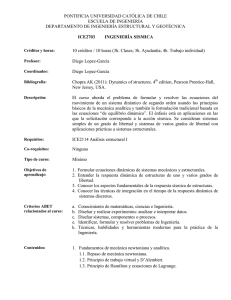
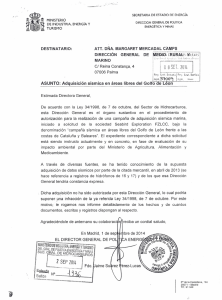
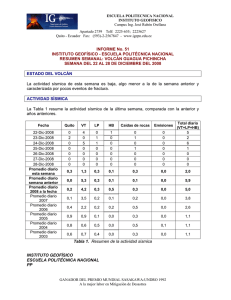
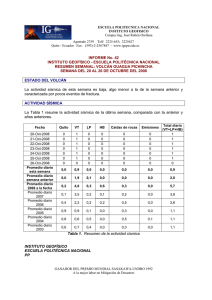
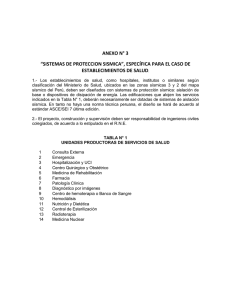
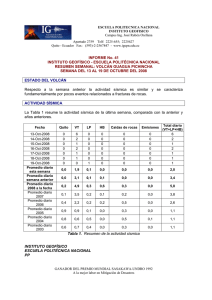
Capítulo 2 Elementos de Dinámica Estructural 2.1 Introducción Ante acciones de tipo dinámico una estructura responde modi…cando su con…guración alrededor de una posición de equilibrio estable. Estos cambios de con…guración pueden alcanzar grandes amplitudes incluso para valores pequeños de la acción excitadora, pudiendo conducir al colapso de la estructura. En este capítulo se revisan algunos de los conceptos básicos del análisis dinámico de estructuras que son de aplicación en las normativas sismorresistentes. Así, en la sección 2 se realiza un breve repaso de los sistemas lineales de un grado de libertad. Se estudian los casos de las vibraciones tanto libres como forzadas y el caso de vibraciones producidas por una excitación de base. A continuación, en la sección 3, se introduce uno de los conceptos clave del cálculo sísmico: la de…nición de la acción por medio de espectros sísmicos de respuesta. La sección 4 se dedica al estudio de sistemas elásticos lineales con varios grados de libertad. Se plantean las ecuaciones del movimiento y se presentan las propiedades de los modos y frecuencias propias de la estructura. La respuesta máxima del sistema ante una solicitación sísmica se obtiene utilizando el análisis modal espectral, i.e., expresando dicha respuesta mediante superposición de modos, obteniendo la respuesta máxima asociada a cada uno de estos modos en base a la acción sísmica de…nida por su espectro de respuesta, y combinando las respuestas máximas modales así calculadas. Finalmente, se hace un breve apunte de los métodos de integración directa de las ecuaciones del movimiento. c Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. °A. CAPÍTULO 2. ELEMENTOS DE DINÁMICA ESTRUCTURAL 2.2 2.2.1 10 Sistemas de un grado de libertad Vibraciones libres Vibraciones libres de sistemas no amortiguados Se estudia la vibración del sistema que se esquematiza en la …gura 2.1, formado por una masa y un muelle de comportamiento elástico y lineal. x(t) kx k m m mx Figura 2.1: Sistema de un g.d.l.. Equilibrio de fuerzas Si se desplaza la masa desde su posición de equilibrio y a continuación se deja vibrar libremente, la masa oscilará alrededor de dicha posición. Aislando la masa y planteando el equilibrio de fuerzas, se obtiene mÄ x + kx = 0 (2.1) La solución a la ecuación (2.1) es de la forma s x(t) = A1 cos ! n t + A2 sen ! n t ; !n = k m (2.2) donde !n es la frecuencia natural o frecuencia propia del sistema (dada en radianes por segundo) y es la frecuencia a que tiende a vibrar el sistema de acuerdo con sus características. A1 y A2 son dos constantes arbitrarias que se calculan a partir de las condiciones iniciales. Amortiguamiento El amortiguamiento es el proceso causante de que un movimiento vibratorio disminuya su amplitud con el tiempo. Su origen puede ser diverso: por rozamiento de dos super…cies, como consecuencia de la fricción interna o histéresis del propio material, etc. Para aproximar las distintas formas de amortiguamiento es habitual en dinámica estructural emplear un amortiguamiento viscoso. En este caso la fuerza amortiguadora es proporcional a la velocidad (2.3) Fa = cx_ donde la constante c de amortiguamiento equivalente es tal que origina la misma disipación de energía que la producida por el amortiguamiento real de la estructura. c Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. °A. CAPÍTULO 2. ELEMENTOS DE DINÁMICA ESTRUCTURAL 11 Vibraciones libres de sistemas amortiguados La …gura 2.2 esquematiza un sistema de un grado de libertad con amortiguamiento viscoso. La ecuación del movimiento viene de…nida en este caso por mÄ x + cx_ + kx = 0 (2.4) La solución a esta ecuación tiene la forma c ¡ 2m t x(t) = e n A1 er1 t + A2 er2 t o s ; r1 = k c2 ¡ = ¡r2 2 4m m (2.5) donde A1 y A2 se calculan de nuevo a partir de las condiciones iniciales. x(t) k c kx m m cx mx Figura 2.2: Sistema de un g.d.l. con amortiguamiento viscoso. Equilibrio de fuerzas. La respuesta del sistema depende del valor de r1 y r2 en la ecuación (2.5). Se pueden distinguir dos casos: 2 c k El sistema está sobreamortiguado y tiende ² Si 4m 2 ¸ m las raíces r1 y r2 son reales. exponencialmente a su posición de equilibrio sin oscilar (…gura 2.3). En el caso particular en que r1 = r2 = 0 se dice que el sistema está críticamente amortiguado, ya que tiende a la posición de equilibrio en el menor tiempo posible. Esto sucede para un valor crítico de la constante de amortiguamiento, ccr , dado por p c2cr k ) c = = 4km = 2m! n (2.6) cr 4m2 m La relación entre la constante de amortiguamiento de un sistema y la constante de amortiguamiento crítico se denomina factor de amortiguamiento »: c c (2.7) = »= ccr 2m! n 2 c k ² Si 4m 2 < m , i.e., si c < ccr , como sucede habitualmente en estructuras de edi…cación, las raíces r1 y r2 son complejas y el sistema vibra con amplitud decreciente hacia su posición de equilibrio (…gura 2.4). La respuesta del sistema adopta entonces la forma s q k c2 ¡ (2.8) = !n 1 ¡ » 2 m 4m2 donde ! d es la frecuencia de vibración amortiguada. Dado que en edi…cación el factor de amortiguamiento de las estructuras suele ser inferior a 0.1, se veri…ca que ! d ' ! n , i.e., la frecuencia de oscilación libre del sistema no va a depender de su amortiguamiento. c ¡ 2m t x(t) = e fA1 cos ! d t + A2 sen !d tg ; c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. !d = 12 x(t) CAPÍTULO 2. ELEMENTOS DE DINÁMICA ESTRUCTURAL t x(t) Figura 2.3: Respuesta de un sistema sobreamortiguado t Figura 2.4: Respuesta de un sistema amortiguado 2.2.2 Vibraciones forzadas Se estudia el caso de un sistema amortiguado de un grado de libertad sometido a una fuerza excitadora de tipo armónico (2.9) F (t) = Fo sen !t según se muestra en la …gura 2.5. Planteando el equilibrio de fuerzas se obtiene la ecuación del movimiento (2.10) mÄ x + cx_ + kx = Fo sen !t cuya solución es la suma de la solución de la ecuación homogénea y una solución particular de la completa, i.e., (2.11) x(t) = xh (t) + xp (t) donde la solución homogénea viene dada por c xh (t) = e¡ 2m t fA1 cos ! d t + A2 sen ! d tg (2.12) y una solución particular de la ecuación completa por xp (t) = s· 1¡ Fo =k ³ ! !n ´2 ¸2 + h 2» !!n c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. i2 sen (!t ¡ ') (2.13) CAPÍTULO 2. ELEMENTOS DE DINÁMICA ESTRUCTURAL x(t) k c 13 kx F(t) m m cx F(t) mx Figura 2.5: Sistema de un g.d.l. sometido a carga armónica. Equilibrio de fuerzas. = Xsen (!t ¡ ') El comportamiento del término xh (t) ya se ha descrito al estudiar las vibraciones libres, y corresponde a la respuesta transitoria del sistema. En sistemas amortiguados esta vibración desaparece al cabo de un cierto tiempo y depende de las condiciones iniciales de velocidad y desplazamiento. El término xp (t) de…ne la respuesta en régimen permanente. En este caso la vibración no desaparece hasta que cesa la excitación exterior. Puesto que en la ecuación (2.13) Fo =k corresponde a la respuesta del sistema para una carga estática de amplitud Fo , se de…ne el coe…ciente de ampli…cación dinámica o factor dinámico de carga como la relación entre las respuestas dinámica y estática del sistema (a una excitación de la misma amplitud) X 1 X = = s· ³ ´2 ¸2 h i2 Fo =k Xest 1 ¡ !!n + 2» !!n (2.14) En la …gura 2.6 se muestra la evolución con la frecuencia excitadora de este coe…ciente. Se distinguen tres zonas: ² ! < ! n : cuando ! ' 0 la fuerza aplicada es cuasi-estática y por tanto la respuesta coincide con la estática. A medida que ! aumenta, el sistema comienza a vibrar en respuesta a la fuerza aplicada, aumentando la ampli…cación según la frecuencia excitadora se aproxima al valor de la frecuencia natural del sistema. El papel que juega el amortiguamiento es doble: por un lado disminuye la ampli…cación de la respuesta y por otro produce un incremento en el desfase '. ² ! ' ! n : en esta zona se produce la máxima ampli…cación de la respuesta. Esto ocurre para una frecuencia de excitación q ! = ! n 1 ¡ 2» 2 (2.15) que prácticamente coincide con ! n para los valores habituales del amortiguamiento (» < 0:1). La ampli…cación obtenida para esta frecuencia es ¯ 1 X ¯¯ 1 ' = q Xest ¯max 2» 1 ¡ 2» 2 2» c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. (2.16) CAPÍTULO 2. ELEMENTOS DE DINÁMICA ESTRUCTURAL 14 10 ξ=0 ξ=0.05 ξ=0.1 ξ=0.2 ξ=0.5 X/Xest 8 6 4 2 0 0,0 0,5 1,0 1,5 ω/ωn 2,0 2,5 3,0 Figura 2.6: Coe…ciente de ampli…cación dinámica x(t) y(t) k (x-y) k c m m c (x-y) mx Figura 2.7: Sistema de un g.d.l. sometido a excitación en su base. Equilibrio de fuerzas. ² ! > ! n : según aumenta el valor de la frecuencia de excitación (! ! 1) al sistema le resulta imposible seguir las oscilaciones inducidas por la acción exterior, por lo que tiende a permanecer en reposo ¯ X ¯¯ !0 (2.17) Xest ¯!!1 2.2.3 Vibraciones producidas por una excitación de la base Las vibraciones producidas por los terremotos están asociadas a un movimiento en la base del sistema (…gura 2.7). A continuación se estudia el caso en que este movimiento es de tipo armónico y(t) = Y sen !t (2.18) Al igual que en los casos anteriores la ecuación del movimiento se obtiene planteando el equilibrio de fuerzas para la masa aislada mÄ x + c(x_ ¡ y) _ + k(x ¡ y) = 0 c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. (2.19) CAPÍTULO 2. ELEMENTOS DE DINÁMICA ESTRUCTURAL 15 Considerando el movimiento relativo entre la masa y la base, z = x ¡ y, la ecuación (2.19) queda mÄ z + cz_ + kz = ¡mÄ y = mY ! 2 sen !t (2.20) que tiene la misma forma que la ecuación del movimiento obtenida al estudiar las vibraciones forzadas con Fo = mY !2 , por lo que para este caso son aplicables todas las conclusiones extraidas en el apartado anterior. 2.3 Espectro de respuesta Cuando la base de un oscilador de un grado de libertad sufre un terremoto caracterizado por un acelerograma a(t), i.e., por una historia de aceleraciones del terreno, el movimiento del sistema viene de…nido por la ecuación mÄ z + cz_ + kz = ¡ma(t) (2.21) o, dividiendo por m, zÄ + 2»! n z_ + ! 2n z = ¡a(t) (2.22) Esta ecuación puede integrarse fácilmente utilizando diversos procedimientos que no se van a detallar aquí1 . En particular, para cualquier sistema caracterizado por su amortiguamiento » y por su frecuencia natural ! n es posible determinar el valor máximo de su respuesta a un acelerograma dado. Si estos valores máximos de respuesta se calculan para todos los posibles sistemas de un grado de libertad, i.e., para todos los posibles valores de » y ! n de interés y se gra…can, se habrá obtenido el denominado espectro sísmico de respuesta del acelerograma a(t). Esta respuesta puede expresarse en desplazamientos, velocidades o aceleraciones, de…niendo en cada caso un espectro de desplazamiento (Sd ), velocidad (Sv ) o aceleración (Sa ). En general, y dado que se trata de obtener la solución de la ecuación (2.22), el espectro se obtiene para un amortiguamiento pre…jado » y una historia de aceleraciones a(t) conocida y se gra…ca en función de la frecuencia ! n (o del período T ) Sd (! n ; ») = jz(t)jmax Sv (! n ; ») = jz(t)j para un acelerograma a(t) determinado _ max Sa (! n ; ») = jÄ z (t) + a(t)jmax (2.23) (2.24) (2.25) donde Sd y Sv son valores relativos y Sa se re…ere al valor total de la aceleración. Estos espectros veri…can las siguientes relaciones2 Sv = ! n Sd Sa = ! 2n Sd (2.26) (2.27) lo que permite representar los tres espectros en una misma grá…ca empleando una escala trilogarítmica (…gura 2.8). En general: 1 véase, e.g., Chopra (1995). Esto es así cuando lo que se están manejando son seudoespectros de respuesta (véase, e.g., Barbat y Canet, 1994). Los seudoespectros se obtienen a partir de los espectros de respuesta introduciendo algunas simpli…caciones habituales en Ingeniería Estructural (» < 0:2 ...), que permiten una mayor facilidad de tratamiento sin pérdida de precisión para el rango de valores de T y » de interés. 2 c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. CAPÍTULO 2. ELEMENTOS DE DINÁMICA ESTRUCTURAL 16 ² Para estructuras de períodos muy bajos (T ! 0), i.e., muy rígidas, Sa ! jÄ y (t)jmax , siendo jÄ y(t)jmax la máxima aceleración del terreno (del acelerograma a(t)). ² Para estructuras de períodos muy largos (T ! 1), i.e., muy ‡exibles, Sd ! jy(t)jmax , siendo jy(t)jmax el desplazamiento máximo del terreno. Figura 2.8: Espectro sísmico de respuesta del terremoto de San Fernando (EE.UU., febrero de 1971). Representación trilogarítmica (»=0.00, 0.05, 0.10, 0.15, 0.20). Por tanto, un espectro sísmico de respuesta resume la respuesta máxima de cualquier sistema de un grado de libertad a un acelerograma determinado a(t). Puesto que para una determinada región geográ…ca es de esperar que los terremotos tengan una serie de características comunes, puede obtenerse un espectro de respuesta tipo (espectro suavizado de diseño) para esa región utilizando para ello los procedimientos desarrollados al efecto en Sismología. La importancia de los espectros radica en que generalmente el proyectista sólo está interesado en los valores máximos de la respuesta a la hora de diseñar el sistema para que resista la acción de un terremoto. c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. CAPÍTULO 2. ELEMENTOS DE DINÁMICA ESTRUCTURAL 2.4 2.4.1 17 Sistemas con varios grados de libertad Ecuaciones del movimiento En el caso de estructuras de edi…cación el análisis dinámico puede simpli…carse considerando un modelo de masas concentradas, sin que ello resulte en una pérdida de precisión signi…cativa. La masa total del sistema se concentra sobre algunos elementos del mismo -fácilmente identi…cablesy la capacidad de deformación sobre otros. mn mi xn(t) xn(t) mn xi(t) mi ki+1 xi(t) ki m2 x2(t) x2(t) m2 k2 m1 x1(t) x1(t) m1 k1 a(t) a(t) Figura 2.9: Edi…cio de cortante Un modelo ampliamente utilizado en el análisis de pórticos planos corresponde al denominado ”edi…cio de cortante” (…gura 2.9). La masa se concentra a nivel de los forjados, que se consideran in…nitamente rígidos en su plano. Los pilares sólo aportan rigidez, pero no masa. Se admite que los giros en las cabezas de los pilares son nulos y que su deformación por axil es despreciable. De esta forma el sistema queda de…nido por un grado de libertad por planta, asociado a la traslación horizontal respecto a la cimentación del edi…cio. Para completar el modelo de edi…cio de cortante se deben incluir de alguna manera las fuerzas de amortiguamiento asociadas a la disipación de energía que se produce durante la vibración del sistema (…gura 2.10). Esto se realiza habitualmente, y al igual que ya se describiera para los sistemas de un grado de libertad, mediante la de…nición de unas fuerzas de amortiguamiento viscoso (i.e., proporcionales a la velocidad), lo que equivale a admitir que existe un mecanismo c Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. °A. CAPÍTULO 2. ELEMENTOS DE DINÁMICA ESTRUCTURAL mn xn(t) cn ki+1 (x i+1-xi) ki+1 xi(t) mi ci H 0 mi 18 ki+1 mi ci xi mi (x i+a(t)) ki ki ki (x i-xi-1) m2 c2 m1 c1 x2(t) k2 x1(t) k1 a(t) Figura 2.10: Edi…cio de cortante con amortiguamiento viscoso. Equilibrio de fuerzas de disipación de energía homogéneo en toda la estructura. Planteando el equilibrio dinámico para cada una de las masas mi (…gura 2.10), se obtiene mi x Äi + ci x_ i + (ki + ki+1 )xi ¡ ki+1 xi+1 ¡ ki xi¡1 = ¡mi a(t) (2.28) o, en forma matricial para todo el sistema, MÄ x + Cx_ + Kx = ¡MJa(t) (2.29) donde J es un vector columna con todos sus elementos iguales a la unidad (J = 1), M es la matriz de masa (diagonal) 0 B B B B B M =B B B B @ 1 m1 C C C C C C C C C A 0 m2 .. . mi 0 .. . (2.30) mn siendo n el número total de plantas -y por tanto de grados de libertad considerados-; K es la matriz de rigidez, que coincide con la del problema estático (cada uno de sus términos kij representa la fuerza que aparece en la coordenada i al dar un desplazamiento estático unidad c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. CAPÍTULO 2. ELEMENTOS DE DINÁMICA ESTRUCTURAL 19 según el grado de libertad j) 0 ¡k2 k1 + k2 B ¡k k2 + k3 ¡k3 2 B B .. B . B K =B ¡ki B B B @ 0 1 C C C C C C C C C A 0 ki + ki+1 ¡ki+1 .. . (2.31) kn donde ki es la rigidez al desplazamiento transversal del conjunto de pilares situado en el nivel i, i.e., entre las plantas i ¡ 1 e i. La rigidez de cada uno de esos pilares viene dada por kp = 12EIp Hi3 siendo Hi la altura de los pilares del nivel i (2.32) C es la matriz de amortiguamiento (diagonal) 0 B B B B B C =B B B B @ 1 c1 C C C C C C C C C A 0 c2 .. . ci 0 .. . (2.33) cn x, x_ y x Ä son vectores conteniendo, respectivamente, los desplazamientos, velocidades y aceleraciones de cada planta; y a(t) es el acelerograma que de…ne la acción sísmica (en la base del edi…cio). Para analizar estructuras tridimensionales caben dos opciones: ² Si el edi…cio es ”razonablemente” regular, puede analizarse a través de dos modelos ortogonales independientes. Los resultados obtenidos para cada una de las direcciones deberán combinarse de acuerdo a unas reglas que, en general, vienen dadas en las normativas sismorresistentes, y que en el caso de la NCSE-94 establecen que ”para cada hipótesis sísmica se combinarán las acciones pésimas de cada modelo con el 30% de las acciones pésimas del otro modelo ortogonal”. ² En el caso de estructuras tridimensionales generales, tanto de barras como continuas, es posible obtener un modelo dinámico3 cuyo comportamiento queda descrito por una ecuación del tipo (2.29), siendo el vector de in‡uencia J en este caso un vector que realiza la descomposición de la excitación a(t) según las direcciones (grados de libertad) consideradas en el análisis, i.e., sus componentes son los desplazamientos de sólido rígido experimentados por los grados de libertad de la estructura cuando la base sufre un desplazamiento unidad en la dirección del sismo. En estos casos puede emplearse una matriz de amortiguamiento proporcional (o de Rayleigh) obtenida como combinación lineal de las matrices de masa y rigidez C =AM+BK (2.34) 3 Veánse, e.g., las formulaciones del Método de los Elementos Finitos dadas en Bathe (1982) c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. CAPÍTULO 2. ELEMENTOS DE DINÁMICA ESTRUCTURAL 20 siendo A y B dos constantes escalares. Generalmente la matriz de masa sólo incluye grados de libertad de traslación y, en cualquier caso, se suele emplear una matriz de masa diagonalizada obtenida a partir de la matriz de masa congruente. 2.4.2 Modos de vibración y frecuencias naturales Obtención de modos y frecuencias naturales Al igual que sucedía en los sistemas de un grado de libertad, las características dinámicas intrínsecas de una estructura de n grados de libertad se obtienen considerando sus vibraciones libres no amortiguadas. En este caso las ecuaciones del movimiento (2.29) se reducen a MÄ x + Kx = 0 (2.35) Esta ecuación admite soluciones no triviales, i.e., compatibles con un movimiento sin fuerzas exteriores aplicadas, de la forma (2.36) x(t) = Xei(!t+') siendo X un vector formado por las amplitudes de los movimientos. Sustituyendo (2.36) en (2.35) se obtiene (K ¡ ! 2 M)X = 0 (2.37) Las ecuaciones (2.37) corresponden a un problema de obtención de autovalores y autovectores. Para que haya soluciones distintas de la trivial debe cumplirse que el determinante de la matriz de coe…cientes sea nulo ¯ ¯ ¯ ¯ (2.38) ¯K ¡ ! 2 M¯ = 0 Como solución de este polinomio característico se obtienen n autovalores ! 2i que corresponden a las n frecuencias naturales o frecuencias propias ! i con las que la estructura puede vibrar libremente. A la frecuencia más baja del sistema se le denomina frecuencia fundamental, ! 1 , y tiene asociado un período fundamental T1 = 2¼ !1 (2.39) Cada autovalor ! 2i lleva asociado un autovector Xi , denominado modo de vibración, que indica la forma de la deformada que adquiere el sistema vibrando con la correspondiente frecuencia natural ! i . Dado que (2.35) es un sistema de ecuaciones homogéneas con determinante nulo, sólo es posible determinar n¡1 componentes de Xi en función de una de ellas, i.e., puede determinarse la forma con que vibra el sistema libremente pero no su amplitud. Resulta habitual normalizar estos modos, e.g., asignando un valor unidad a su primera componente Ái = 8 9 1 > > > > > > > > > > Á > > i2 < = Xi Ái3 = Xi1 > .. > > > > > > . > > > > > : ; Áin c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. (2.40) CAPÍTULO 2. ELEMENTOS DE DINÁMICA ESTRUCTURAL 21 o aplicando cualquier otro criterio para obtener los modos normalizados Ái . En general la estructura vibrará libremente o bien según uno de los modos y su frecuencia propia asociada, o bien según una combinación lineal de dichos modos. Propiedades de los modos de vibración Se puede demostrar fácilmente que los modos de vibración de una estructura satisfacen las siguientes condiciones de ortogonalidad respecto a las matrices de masa y rigidez ÁTi MÁi = Mi ; ÁTi MÁj = 0 i 6= j ÁTi KÁi = ! 2i Mi = Ki ; ÁTi KÁj = 0 i 6= j (2.41) (2.42) donde Mi y Ki son escalares. En caso de que la matriz de amortiguamiento sea de la forma (2.34), los modos también serán ortogonales respecto a ella ÁTi CÁi = ÁTi (AM + BK)Ái = AMi + BKi = Ci ; ÁTi CÁj = 0 i 6= j (2.43) Por tanto, ordenando todos los modos de vibración en una matriz modal © © = [Á1 Á2 ::::::Án ] (2.44) las condiciones de ortogonalidad anteriores resultan en ©M© = M ©C© = C ©K© = K (2.45) (2.46) (2.47) donde M , C y K son matrices diagonales cuyos términos vienen de…nidos por las relaciones (2.41), (2.42) y (2.43). En el caso poco habitual de que existan raíces dobles ! 2i , se puede demostrar que hay in…nitos autovectores asociados a este autovalor contenidos en un plano que es ortogonal al resto de modos de vibración. 2.4.3 Superposición modal Coordenadas generalizadas En la sección anterior se ha visto como los n modos de vibración de un sistema de n grados de libertad son independientes y ortogonales entre sí, por lo que forman una base completa. Por tanto, cualquier movimiento del sistema puede expresarse como combinación lineal de dichos modos n x(t) = X Ái ³ i (t) = ©³ i=1 c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. (2.48) CAPÍTULO 2. ELEMENTOS DE DINÁMICA ESTRUCTURAL 22 donde ³ i (t) son funciones escalares del tiempo. Las coordenadas ³ i se denominan coordenadas generalizadas y describen la posición del sistema referido a un sistema de coordenadas cuyos vectores directores son los modos de vibración. Premultiplicando (2.48) por ÁTi M se obtiene 0 ÁTi Mx = ÁTi M @ n X 1 Áj ³ j (t)A = ÁTi MÁi ³ i (2.49) j=1 dadas las condiciones de ortogonalidad (2.41). De esta forma, los valores de las coordenadas generalizadas ³ i se pueden obtener a partir de las coordenadas xi a partir de ³i = ÁTi Mx ÁTi MÁi (2.50) Método de superposición modal El movimiento de una estructura de n grados de libertad sometida a vibraciones forzadas está regido por las ecuaciones (2.29). Haciendo el cambio de coordenadas cartesianas x a coordenadas generalizadas ³ se obtiene 0 M@ n X j=1 1 0 Áj ³Äj A + C @ n X 1 0 Áj ³_ j A + K @ j=1 n X 1 Áj ³ j A = ¡MJa(t) (2.51) j=1 ya que las formas modales no dependen del tiempo. Premultiplicando esta ecuación por ÁTi y teniendo en cuenta las condiciones de ortogonalidad (2.41-2.43) se obtiene Mi ³Äi + Ci ³_ i + Ki ³ i = ¡ÁTi MJa(t) (2.52) i.e., el sistema de n ecuaciones diferenciales acopladas (2.29) se ha transformado en un conjunto de n ecuaciones independientes, resolubles cada una de ellas por cualquiera de los métodos aplicables a sistemas de un grado de libertad. Dividiendo la ecuación (2.52) por ÁTi MÁi = Mi se obtiene ÁT MJ Ä a(t) = ¡¿ i a(t) ³ i + 2» i ! i ³_ i + ! 2i ³ i = ¡ Ti Ái MÁi (2.53) donde ¿ i se denomina coe…ciente de participación del modo i ¿i = ÁTi MJ ÁTi MÁi (2.54) y re‡eja la relación entre la masa total asociada al modo i (ÁTi MÁi ) y la masa asociada al modo i que moviliza el sismo (ÁTi MJ)4 . En la ecuación (2.53) se ha introducido la de…nición Ci Ci C cri = = 2» i ! i Mi C cri Mi (2.55) Por lo tanto el coe…ciente de participación modal ¿ i cuanti…ca de alguna manera qué parte de la fuerza excitadora total es la encargada de excitar, exclusivamente, el modo i. 4 c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. CAPÍTULO 2. ELEMENTOS DE DINÁMICA ESTRUCTURAL 23 q donde C cri = 2 K i M i es el amortiguamiento crítico del modo i. Para resolver la ecuación (2.53) es habitual evaluar directamente un factor de amortiguamiento para cada modo » i en vez de partir de la matriz de amortiguamiento C. Una vez calculadas a partir de (2.53) las coordenadas generalizadas ³ i (t), se obtiene la evolución en el tiempo de los desplazamientos x(t) mediante la ecuación (2.48). Las fuerzas según cada uno de los grados de libertad considerados en cada instante de tiempo, F(t), se calculan de manera análoga al análisis estático, i.e., F(t) = Kx(t) (2.56) donde K es la matriz de rigidez de la estructura. La desventaja de este tipo de análisis es que proporciona un exceso de información innecesaria, ya que a la hora de diseñar el proyectista está generalmente interesado en la respuesta máxima del sistema (más concretamente en mantener dicha respuesta dentro de unos límites pre…jados), y no en la evolución a lo largo del tiempo de los valores de esa respuesta. Por este motivo, la acción sísmica de diseño suele de…nirse en la mayoría de las normativas sismorresistentes en base a un espectro de respuesta y no en base a acelerogramas, empleándose el análisis modal espectral como procedimiento de cálculo. En general, los modos de vibración correspondientes a las frecuencias propias más bajas (i.e., a los períodos más altos) son los que contienen menor energía de deformación elástica, por lo que son los que condicionan en mayor medida la respuesta del sistema. Por este motivo, para obtener dicha respuesta bastará con considerar las aportaciones de los r primeros modos de vibración r x(t) = X Ái ³ i (t) ; r¿n (2.57) i=1 Además, los modos asociados a las frecuencias más elevadas son los que incorporan un mayor error numérico en su obtención, debido a aspectos tales como la propia discretización de la estructura (se requiere una discretización más detallada para capturar adecuadamente las frecuencias y los modos más altos de la estructura) o el procedimiento numérico empleado para su determinación, por lo que su no inclusión en (2.57) no repercute en una pérdida de precisión en la respuesta. El criterio para decidir el número r de modos cuya aportación al resultado es signi…cativa viene generalmente de…nido en las normativas sismorresistentes, y en el caso de la NCSE-94 se establece que deben considerarse ”aquellos para los que la suma de las masas efectivas sea superior al 90% de la masa movilizada en el movimiento sísmico”. El concepto de masa modal efectiva se presenta en el siguiente apartado. 2.4.4 Análisis Modal Espectral Dada su sencillez de aplicación y los buenos resultados que proporciona, el método de cálculo recomendado por la mayoría de las normas sísmicas es el análisis modal espectral. La respuesta máxima del sistema se obtiene combinando las respuestas máximas calculadas para cada uno c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. CAPÍTULO 2. ELEMENTOS DE DINÁMICA ESTRUCTURAL 24 de sus modos más signi…cativos, en base a una acción sísmica caracterizada por su espectro de respuesta. La idea es simple: dado que, en análisis lineal, cualquier sistema de n grados de libertad puede expresarse como superposición de n sistemas de un grado de libertad –asociados a sus modos de vibración–, y puesto que el espectro sísmico de respuesta permite determinar la respuesta máxima de cada uno de estos sistemas de un grado de libertad a la acción sísmica, es posible obtener la respuesta máxima de la estructura completa –con n grados de libertad– superponiendo las aportaciones de los n sistemas de un grado de libertad en que se ha descompuesto el sistema original. Respuesta máxima modal a un espectro sísmico de respuesta La acción sísmica se de…ne por medio de su espectro de respuesta en aceleraciones, Sa , i.e., por la aceleración máxima de un oscilador de un grado de libertad cuyo movimiento está de…nido por la ecuación (2.22). Comparando (2.22) con la ecuación del movimiento desacoplada para el modo i de un sistema de n grados de libertad (2.53), se deduce que la aceleración máxima asociada a la coordenada generalizada ³ i viene dada por ¯ ¯ ¯Ä ¯ ¯³ i (t)¯ max = ¿ i Sa (! i ; » i ) = ¿ i Sa ji (2.58) El desplazamiento máximo asociado a ³ i se determina a partir de (2.27) j³ i (t)jmax = ¿ i Sa ji ! 2i (2.59) A continuación se obtienen una serie de características modales máximas de especial interés: Desplazamientos modales máximos: Para el modo de vibración i se obtienen los desplazamientos máximos como xi jmax = 8 > xi1 > > > < xi2 9 > > > > = > > > > : > > > > ; .. . xin = Ái j³ i (t)jmax = Ái ¿ i Sa ji Sa j = ´i 2 i 2 !i !i (2.60) max donde ´ i es un vector que contiene los denominados factores de distribución del modo i ´i = ¿ i Ái (2.61) Fuerzas estáticas equivalentes: Una vez conocidos los desplazamientos modales máximos pueden obtenerse las fuerzas sísmicas estáticas equivalentes, Fi , correspondientes al modo de vibración i como Fi = K xi jmax = KÁi ¿ i Sa ji = MÁi ¿ i Sa ji = M´ i Sa ji ! 2i c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. (2.62) CAPÍTULO 2. ELEMENTOS DE DINÁMICA ESTRUCTURAL 25 En el caso de un edi…cio de cortante la ecuación (2.62) se reduce a Fik = mk ´ik Sa ji = ´ ik Sa ji Pk = sik Pk g (2.63) que proporciona la fuerza equivalente correspondiente a la planta k (i.e., al grado de libertad k) y modo de vibración i. En (2.63) sik se denomina coe…ciente sísmico, g es la aceleración de la gravedad y Pk es el peso correspondiente a la masa mk de la planta k. Fin mn Fik mk V ik Fi2 m2 Fi1 m1 Figura 2.11: Obtención del cortante modal Vik A partir de las fuerzas equivalentes Fik se obtiene por equilibrio de fuerzas (…gura 2.11) el cortante Vik de cada planta k en el modo i, i.e., como suma de las Fik existentes entre la última planta y la planta k considerada Vik = n X Fij (2.64) j=k Análogamente, el cortante modal en la base del edi…cio se obtiene como Vi1 = n X j=1 Fij = n X mj ´ ij Sa ji (2.65) j=1 Masa modal efectiva: Para un edi…cio de cortante la masa modal efectiva del modo de vibración i, Mi¤ , se de…ne como aquella que veri…ca la relación Vi1 = Mi¤ Sa ji c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. (2.66) CAPÍTULO 2. ELEMENTOS DE DINÁMICA ESTRUCTURAL 26 i.e., como aquella que asociada a un oscilador de un grado de libertad cuya frecuencia natural coincide con la del modo i, produce el mismo cortante en la base de la estructura que el correspondiente al cortante modal máximo del modo i. Teniendo en cuenta las ecuaciones (2.65) y (2.61) Mi¤ = n X mj ´ij = ¿ i j=1 n X mj Áij (2.67) j=1 Para el caso de una estructura general se obtendría Mi¤ = ¿ i ÁTi MJ (2.68) i.e., el producto del coe…ciente de participación del modo i por la masa asociada al modo i que moviliza el terremoto. Se puede demostrar, como era esperable, que la suma de las masas efectivas de todos los modos de vibración es igual a la masa total de la estructura movilizada en el sismo. La importancia de este concepto radica en que permite establecer un criterio para determinar el número de modos de vibración que se deben incluir en el análisis. Tal como se apuntó anteriormente, la NCSE-94 establece que ”pueden considerarse modos con contribución signi…cativa aquellos para los que la suma de las masas efectivas de los r primeros modos considerados sea superior al 90% de la masa movilizada en el movimiento sísmico” r X i=1 Mi¤ = r X ¿ i ÁTi MJ i=1 = r X ¿ 2i ÁTi MÁi ¸ 0:90JT MJ (2.69) i=1 En el caso de edi…cios de cortante esta condición puede expresarse en la forma r X i=1 Pn 2 k=1 (mk Áik ) 2 k=1 mk Áik Pn ¸ 0:90 n X mk (2.70) k=1 Respuesta máxima total: Combinación de modos Sea S la variable (desplazamientos, tensiones ...) cuyo valor máximo se quiere determinar, y Si su valor máximo en el modo i. Dado que el máximo de cada modo no se produce para los distintos grados de libertad en el mismo instante de tiempo y puesto que, además, dicho máximo se ha obtenido en valor absoluto, S no se podrá calcular como suma directa de los máximos de cada modo. Se han propuesto distintos métodos para calcular S a partir de los valores modales Si . Quizás la regla de combinación más extendida es la que propone la NCSE-94 en su articulado v u r uX S = t Si2 (2.71) i=1 que proporciona resultados razonablemente válidos siempre y cuando los períodos de los r modos considerados di…eran entre sí más de un 10%, i.e., cuando no se produzca acoplamiento entre c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. CAPÍTULO 2. ELEMENTOS DE DINÁMICA ESTRUCTURAL 27 ellos. En caso contrario, se proponen o bien S= r X jSi j (2.72) i=1 que proporciona un valor excesivamente conservador, o bien v uX r u r X t S= Si Sj ¼ij (2.73) i=1 j=1 donde ¼ij es un factor que depende de los valores de las frecuencias naturales y del amortiguamiento de la estructura. 2.4.5 Integración directa de las ecuaciones del movimiento Una alternativa al análisis modal es la integración directa, mediante un algoritmo paso a paso, de las ecuaciones del movimiento (2.29) ² En primer lugar es necesario dividir el intervalo de tiempo a analizar en pequeños subintervalos ¢t. Este proceso de…ne los instantes de tiempo t = ti en que se va a obtener la respuesta (discreta) del sistema. xi+1 ) y velocidades (x_ i+1 ) en función ² En cada instante t = ti+1 se expresan aceleraciones (Ä de los valores de aceleraciones, velocidades y desplazamientos en instantes previos (ya conocidos). ² Estas ecuaciones junto con las ecuaciones del movimiento (2.29) particularizadas para el instante t = ti (métodos explícitos: diferencias centrales...) o t = ti+1 (métodos implícitos: Newmark, Houbolt...) permiten obtener los desplazamientos en t = ti+1 (xi+1 ) y pasar al instante de tiempo siguiente. Hay toda una gama de métodos diferentes para llevar a cabo este proceso. Cada uno de ellos propone una forma de aproximar aceleraciones y velocidades en un instante en función de las variables en instantes anteriores, con el objetivo de mejorar la precisión y la estabilidad de los resultados. La gran ventaja de estos algoritmos frente a los métodos basados en el análisis modal es que son válidos tanto para problemas lineales como no lineales. A cambio, su coste computacional es mucho mayor y frente al análisis modal espectral presentan los mismos inconvenientes que la obtención de la respuesta en el tiempo mediante análisis modal en lo referente al exceso de información proporcionada y a la de…nición de la acción sísmica. c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. Capítulo 3 Conceptos Generales del Comportamiento Sísmico de Estructuras 3.1 Introducción La …losofía del proyecto sismorresistente de estructuras de edi…cación que recogen las normativas se basa en de…nir unos niveles de daño admisible en función de la intensidad de los terremotos que la estructura puede sufrir durante su vida útil: ² Las construcciones deben resistir, en régimen elástico y por tanto sin ningún tipo de daño estructural, los sismos de probabilidad apreciable de ocurrencia durante su vida útil, entendiendo por estos los que tienen un período de retorno1 del mismo orden del período de vida útil de la estructura. ² Ante sismos severos con probabilidad razonable de ocurrencia (a los que la NCSE-94 asigna un período de retorno de quinientos años) se admite que la estructura va a entrar en el rango anelástico. Se acepta por tanto que se produzcan deformaciones permanentes, y consecuentemente daños, más o menos importantes pero que nunca lleguen a provocar el colapso de la estructura. Realmente, a este nivel deberían considerarse dos estados límite diferentes. Ante sismos relativamente severos el daño estructural debe mantenerse dentro de unos límites que permitan la reparación de la estructura con un coste razonable. En cambio, ante el sismo de mayor intensidad que pueda tener lugar el objetivo es evitar el colapso, aunque los daños producidos en la estructura sean irreparables. El objetivo de esta …losofía es diseñar construcciones razonablemente económicas pero seguras, aun a costa de admitir que la acción de un terremoto severo sea muy superior a la acción 1 Se de…ne como período de retorno de un terremoto el intervalo de tiempo medio entre dos sucesos sísmicos de características similares. c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. CAPÍTULO 3. COMPORTAMIENTO SÍSMICO DE ESTRUCTURAS 29 de diseño obtenida de las normativas. Esta diferencia sólo resulta admisible si los elementos estructurales y sus conexiones poseen una capacidad de deformación anelástica adecuada, que garantice que la estructura es capaz de disipar ese exceso de energía deformándose plásticamente. Estas ideas entroncan directamente con el concepto de ductilidad, que se discute en la segunda sección de este capítulo. Otros aspectos que afectan la respuesta sísmica de una estructura y que se tratan en las siguientes secciones son el de los efectos de interacción suelo-estructura, la consideración de torsiones globales de la estructura o la necesidad de incorporar en el análisis los efectos de segundo orden. En todos los casos se hace una breve mención a cómo abordan estos aspectos las vigentes normativas sismorresistentes. 3.2 Ductilidad La energía que un terremoto aporta a la estructura se disipa por el efecto combinado del amortiguamiento y, sobre todo, de las deformaciones anelásticas de sus elementos. Esta capacidad de los elementos estructurales para disipar energía mediante deformaciones cíclicas en el dominio anelástico, sin que se produzca su colapso, es lo que se denomina ductilidad de la estructura. F Fe xmax xe xe xmax x Fe Figura 3.1: Comportamiento elastoplástico ideal de un sistema de un grado de libertad Para centrar ideas se considera el comportamiento elastoplástico de un sistema de un grado de libertad, tal como ilustra la …gura 3.1, en la que se representa la evolución de la fuerza aplicada, F , frente al desplazamiento producido, x. El área encerrada dentro del ciclo de histéresis resultante mide la energía disipada en cada ciclo de carga/descarga. El criterio más extendido para cuanti…car la ductilidad de este sistema consiste en de…nir un coe…ciente de comportamiento por ductilidad xmax (3.1) ¹= xe c Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. °A. CAPÍTULO 3. COMPORTAMIENTO SÍSMICO DE ESTRUCTURAS 30 que relaciona el máximo desplazamiento plástico del modelo con el máximo desplazamiento elástico y lineal. Cuanto mayor sea ¹, mayor será la capacidad de disipar energía del sistema en régimen plástico y por tanto mayor será la diferencia admisible entre las fuerzas sísmicas reales y las fuerzas consideradas para el diseño (…gura 3.2). F DIFERENCIA PERMITIDA POR DUCTILIDAD FUERZA REAL DURANTE UN SISMO SEVERO FUERZA DE DISEÑO SEGÚN NORMATIVAS SISMORRESISTENTES PERÍODO Figura 3.2: Fuerzas sísmicas reales vs Fuerzas consideradas en el diseño En el caso de una estructura con varios grados de libertad, un comportamiento dúctil adecuado deberá permitir la disipación de buena parte de la energía que el sismo aporta a la estructura mediante mecanismos de histéresis estables y bien distribuidos por toda ella, que aseguren que no se produce el colapso global de la estructura por el fallo de alguno de sus elementos. La ductilidad global de la estructura depende de la ductilidad de sus materiales por un lado y de la tipología estructural y los detalles constructivos (más concretamente de las soluciones constructivas adoptadas en los nudos de conexión entre elementos) por otro: ² En general el acero proporciona mayor ductilidad que el hormigón y éste más que la obra de fábrica. ² La ductilidad es mayor en las estructuras desplazables -como pórticos- que en las rígidas -como las apantalladas-, pero siempre que en los nudos exista la capacidad su…ciente para permitir importantes deformaciones. ² A nivel de sección, la capacidad de disipación de energía es mayor en las secciones ‡ectadas que en las comprimidas, por lo que se debe potenciar que sean las ‡ectadas las que se agoten antes. En base a la ductilidad las normativas sismorresistentes permiten minorar las acciones de cálculo (…gura 3.2), y es por ello que muchas de las prescripciones constructivas y recomendaciones de diseño re‡ejadas en tales normativas están orientadas a garantizar precisamente que la estructura tenga la ductilidad esperada. En cualquier caso, el proyectista debe ser consciente del compromiso que adquiere en el diseño y detalle de los elementos estructurales para asegurar el c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. CAPÍTULO 3. COMPORTAMIENTO SÍSMICO DE ESTRUCTURAS 31 Figura 3.3: Espectro de respuesta en aceleraciones (componentes horizontales). Terremoto de Grecia (7/09/99). nivel de ductilidad previsto en el análisis. La limitación al valor de ¹ considerada en la NCSE-94 (¹ = 4 para estructuras de ductilidad muy alta) se impone para establecer un tope sobre dicha minoración de las acciones de diseño y así garantizar que la edi…cación sea capaz de resistir sin daño estructural los sismos de probabilidad apreciable de ocurrencia. La …gura 3.3 ilustra claramente estos conceptos sobre un caso real: el reciente terremoto de Grecia (7 de septiembre de 1999; intensidad 5.9 en la escala de Richter). En ella se representa el espectro de aceleraciones propuesto por la normativa griega vigente, de 1993, y el espectro realmente registrado durante dicho terremoto. En este caso particular se puede observar como los edi…cios más afectados fueron los de períodos fundamentales por debajo de 0.4 segundos, i.e., edi…cios de entre dos y cuatro plantas de altura aproximadamente. En el caso de adoptar valores elevados del coe…ciente de comportamiento por ductilidad, ¹, la NCSE-94 establece en sus comentarios que deberá comprobarse que las deformaciones correspondientes son admisibles para la estructura, elementos secundarios y juntas con edi…caciones contiguas. En este sentido, uno de los aspectos de diseño que otras normativas sí controlan, caso del EC-8, y que sin embargo la NCSE-94 sólo menciona en este comentario -sin …jar unos límites máximos- es el importante papel que el corrimiento horizontal relativo entre plantas juega en el control del daño no estructural (tabiquerías, instalaciones, etc.). Finalmente, cuando los elementos resistentes a fuerzas horizontales sean de diferente ductilidad, la NCSE-94 señala que deberá comprobarse la compatibilidad de sus deformaciones. c Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. °A. CAPÍTULO 3. COMPORTAMIENTO SÍSMICO DE ESTRUCTURAS 3.3 32 Interacción suelo-estructura Las condiciones del terreno y los posibles fenómenos de interacción suelo-estructura son uno de los factores que mayor in‡uencia pueden tener sobre la respuesta estructural. En particular, cuando la estructura se asienta en un terreno rígido, los fenómenos de interacción son despreciables. Las frecuencias propias de la estructura no se ven alteradas por su interacción con el suelo. Igualmente, las características de las ondas sísmicas prácticamente no se ven alteradas por la presencia de la estructura. En este caso el contenido en frecuencias altas del terremoto suele ser signi…cativo, por lo que se ha observado, en términos generales, un mayor nivel de daño en estructuras rígidas que en estructuras ‡exibles. Cuando la estructura se asienta en un terreno blando, los fenómenos de interacción suelo estructura cobran importancia, debiéndose incorporar en el análisis. Las frecuencias naturales del sistema suelo-estructura disminuyen respecto a las de la estructura cimentada en suelo rígido. De igual manera, las ondas sísmicas sufren modi…caciones apreciables debido a la presencia de la estructura. Un suelo blando tiende a …ltrar el contenido en frecuencias del terremoto, ampli…cando los períodos largos. En general se ha observado un mayor daño en estructuras ‡exibles cuando las condiciones son de suelo blando. La NCSE-94 incorpora el efecto de las condiciones locales del terreno modi…cando el espectro elástico de diseño en función de dichas condiciones, distinguiendo tres tipos de suelo en base a la velocidad de propagación de las ondas transversales2 Vs : ² Terreno Tipo I: Vs > 750 m=s ² Terreno Tipo II: 400 m=s < Vs · 750 m=s ² Terreno Tipo II: Vs · 400 m=s 3.4 Efectos de torsión global de la estructura Cuando no coinciden el centro de masas y el centro de torsión o de rigidez en una planta de una edi…cación, aparece en dicha planta un momento torsor que debe ser absorbido por los soportes de la planta. Este fenómeno suele ser debido a una falta de simetría de la edi…cación o a una distribución no uniforme de las masas. En cualquier caso, la NCSE-94 estipula un incremento de la excentricidad del centro de torsión con respecto al de masa para cubrir los efectos de una torsión accidental, estableciendo en su articulado que en las estructuras de edi…cación se deberá considerar una excentricidad adicional de la acción sísmica en cada planta, no menor de 1/20 de la mayor dimensión de la planta en el sentido perpendicular a la dirección del sismo, siempre que las cargas -supuestas de distribución uniforme en el cálculo- pudieran ocupar sólo una parte de la super…cie (…gura 3.4). 2 Resultan destacables las diferencias entre esta clasi…cación y la que realiza el EC-8 en lo referente a las velocidades de corte Vs consideradas c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. CAPÍTULO 3. COMPORTAMIENTO SÍSMICO DE ESTRUCTURAS 33 Figura 3.4: Excentricidad mínima para masas uniformemente repartidas. En caso de modelar la estructura tridimensionalmente para su análisis dinámico, la inclusión de los efectos de torsión resulta automática. Sin embargo, en el caso más habitual de que el modelo de la estructura corresponda al de un edi…cio de cortante en dos direcciones ortogonales, la torsión se incluye en el análisis de manera desacoplada, superponiendo a los esfuerzos producidos por las fuerzas sísmicas equivalentes (obtenidas considerando sólo un grado de libertad de traslación por planta) los esfuerzos que aparecen en los soportes de la estructura a causa de la torsión. El valor del torsor en cada planta viene dado por el momento que producen dichas fuerzas sísmicas equivalentes -aplicadas en el centro de masa- respecto al centro de rigidez de la planta. 3.5 Efectos de segundo orden Si los desplazamientos laterales provocados por la acción sísmica son elevados, se hace necesario considerar los efectos de segundo orden. Así, al cobrar importancia el cambio de geometría de la estructura debido a la aplicación de las cargas horizontales, se produce un momento adicional en los soportes causado por los descentramientos de las cargas verticales. La NCSE-94 permite despreciar dichos efectos cuando el desplome de la cabeza del edi…cio no supere el dos por mil de la altura, o cuando en cada planta se veri…que P d < 0:10F h (3.2) siendo P el peso total por encima de la planta; d el desplazamiento relativo entre la base y la cabeza de los soportes de la planta considerada, según un análisis lineal; F la acción horizontal total por encima de la planta y h la altura entre plantas. Esta última condición equivale a despreciar los efectos de segundo orden cuando el momento adicional inducido por la deformación de la estructura (…gura 3.5) sea menor que el 10% del momento de primer orden provocado por la acción horizontal. c Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. °A. CAPÍTULO 3. COMPORTAMIENTO SÍSMICO DE ESTRUCTURAS MB P B h 7,40 cm V 34 V MA A P d 3,60 cm Figura 3.5: Momentos de segundo orden Sin embargo, en caso de que estas condiciones no se cumplan, la NCSE-94 no propone ninguna alternativa para incluir los efectos de segundo orden. En este sentido, el EC-8 también plantea una relación del tipo (3.2), aunque en su caso el desplazamiento d relativo entre plantas debe estimarse en régimen no lineal (i.e., afectado por el coe…ciente de ductilidad considerado en el análisis), lo cual parece más coherente con la realidad del problema. Adicionalmente, en el caso en que 0:1 < µ = Pd < 0:2 Fh (3.3) el EC-8 permite la inclusión de los efectos de segundo orden incrementando las solicitaciones sísmicas de la planta considerada mediante el factor 1 1¡µ c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. (3.4) Capítulo 4 De…nición de la Acción Sísmica y Métodos de Cálculo en la NCSE-94 4.1 Introducción En este capítulo se presentan los aspectos prácticos del cálculo sísmico de estructuras según la vigente normativa sismorresistente NCSE-94. Se abordan por tanto la de…nición de la acción sísmica y los métodos de análisis para determinar la respuesta estructural a dicha acción. Ambos aspectos están íntimamente relacionados: mientras que en un análisis paso a paso en el dominio del tiempo la excitación deberá de…nirse por un acelerograma, en un análisis modal espectral la acción deberá caracterizarse mediante su espectro sísmico de respuesta, tal como se vio en el segundo capítulo. En cualquier caso las normativas deben ser capaces de proponer procedimientos de análisis lo más claros y simples posibles y que, por supuesto, permitan evaluar de manera su…cientemente aproximada la respuesta de la estructura. Este es el motivo por el cual el análisis modal espectral goza de tan amplia aceptación en las normativas sismorresistentes: su aplicación resulta sencilla y directa y proporciona los valores máximos de la respuesta. De una forma rigurosa, la teoría de los espectros sísmicos de respuesta sólo permitiría la de…nición de la acción sísmica en estructuras de comportamiento elástico y lineal. Sin embargo, las normativas admiten incursiones de la estructura en el rango anelástico ante sismos severos. La NCSE-94, al igual que gran parte de las normativas existentes en el mundo, extiende el concepto de espectro sísmico de respuesta al análisis de sistemas no lineales. Aunque esta extensión no está claramente fundamentada desde un punto de vista teórico, los resultados que proporciona son su…cientemente razonables y de fácil obtención. Para terminar el capítulo se presenta el procedimiento de cálculo simpli…cado recomendado por la NCSE-94 para los casos más usuales de edi…cación y se comparan en un ejemplo los resultados obtenidos por este método y por el método general de análisis. c Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. °A. CAPÍTULO 4. NCSE-94: ACCIÓN SÍSMICA Y MÉTODOS DE CÁLCULO 4.2 4.2.1 36 De…nición de la acción sísmica Consideraciones generales En la introducción se ha puesto de mani…esto la ”dependencia” entre el procedimiento de análisis dinámico empleado y la de…nición de la acción sísmica. Si bien la NCSE-94 observa la posibilidad de efectuar un estudio dinámico directo, establece como método usual de cálculo el análisis modal de la estructura. Por este motivo de…ne la acción mediante su espectro sísmico de respuesta y, aunque permita también su de…nición mediante acelerogramas reales o arti…ciales -que deberán ser compatibles con los espectros dados en la normativa-, no proporcionan ningún procedimiento de obtención de tales acelerogramas, dejando este tema pendiente del criterio del proyectista. Partiendo de una información sísmica básica sobre el emplazamiento geográ…co de la edi…cación, las características locales del terreno de cimentación, la importancia estratégica de la construcción (e.g., hospitales e infraestructuraas básicas se consideran construccionees de especial importancia) y la vida útil de la estructura, la NCSE-94 de…ne la acción sísmica mediante su espectro elástico de respuesta en aceleraciones. Posteriormente, dicho espectro es corregido de acuerdo a las características de amortiguamiento y ductilidad de la estructura, obteniéndose de esta manera el espectro de diseño en base al que calcular los desplazamientos modales máximos y, a partir de ellos, el resto de las variables (esfuerzos, tensiones...). 4.2.2 Información sísmica básica La NCSE-94 proporciona un mapa de peligriosidad sísmica del territorio nacional que suministra, para cada punto del territorio, la aceleración sísmica básica, ab , y el denominado coe…ciente de contribución sísmica K. La aceleración de cálculo, ac , se obtiene en función de ab y de la vida útil (o la importancia) de la construcción. El espectro también depende de las característcas del terreno de cimentación. La in‡uencia de este factor se introduce a través de un coe…ciente de suelo C. De…nidos estos parámentros se está en condiciones de obtener el espectro elástico de respuesta. 4.2.3 Espectro elástico de respuesta La NCSE-94 de…ne el espectro de respuesta de la aceleración absoluta de un sistema de un grado de libertad con un factor de amortiguamiento respecto al crítico » = 0:05 como Sa¤ = ®(T )ac c Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. °A. (4.1) CAPÍTULO 4. NCSE-94: ACCIÓN SÍSMICA Y MÉTODOS DE CÁLCULO 37 siendo ®(T ) una función del período propio del sistema (considerado en segundos) de…nida por ®(T ) = 8 1 + [®(To ) ¡ 1] T =To > > > > > < > > > > > : para T < To ®(To ) para To · T · T1 ®(To )T1 =T para T > T1 (4.2) donde ®(To ) = (3C ¡ 3:8)(K ¡ 1:25) + 2:3 (4.3) (4.4) To = 0:125C + 0:2K ¡ 0:175 0:215K(5C ¡ 1) T1 = (4.5) ®(To ) En la …gura 4.1 se gra…ca ®(T ) para los distintos tipos de terreno considerados en la norma y un coe…ciente de contribución sísmica K = 1:0. Figura 4.1: Espectro elástico de respuesta Para obtener el espectro de diseño tan sólo resta ajustarlo a las características de la estructura que se va a calcular, incorporando mediante un coe…ciente empírico  -dado en la NCSE-94- el efecto del amortiguamiento (si » 6= 0:05) y de la ductilidad de la estructura Sa = Â(º; ¹)Sa¤ = Â(º; ¹)®(T )ac (4.6) donde  es función del coe…ciente corrector por amortiguamiento µ ¶ 0:05 0:4 º= » y del coe…ciente de comportamiento por ductilidad ¹. 4.3 (4.7) Métodos de cálculo La NCSE-94 establece como método habitual de cálculo el análisis modal espectral de la estructura. Adicionalmente, desarrolla un método simpli…cado de cálculo para los casos usuales en edi…cación. También permite el estudio dinámico directo de la estructura. c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. CAPÍTULO 4. NCSE-94: ACCIÓN SÍSMICA Y MÉTODOS DE CÁLCULO 4.3.1 38 Estudio dinámico directo Sólo está justi…cado en casos especiales, como pueden ser centrales nucleares u otras edi…caciones singulares o de especial importancia. Su aplicación presenta inconvenientes a nivel de de…nición de la acción y a nivel del esfuerzo de cálculo implicado: ² La acción debe de…nirse en base a un acelerograma que la normativa no especi…ca y que exige por tanto un análisis previo y un mayor conocimiento sobre la sismología de la zona. ² El proceso de obtención de la respuesta es mucho más costoso. Proporciona mucha más información que el análisis espectral (respuesta para toda una serie de frecuencias o evolución detallada a lo largo del tiempo), pero este exceso de información suele resultar innecesario ya que generalmente basta con conocer la respuesta máxima de la estructura para su correcto diseño. En el caso del EC-8 se permite también la posibilidad de un análisis estocástico basado en la teoría de vibraciones aleatorias, para lo cual la acción debe de…nirse mediante una densidad espectral de potencia compatible con el espectro sísmico de respuesta proporcionado por la normativa. 4.3.2 Análisis modal espectral El modelo discreto de la estructura cuyo comportamiento dinámico se va a analizar ya fue discutido en la sección 2.4.1. Básicamente se pueden considerar o bien un modelo con tres grados de libertad por planta (dos traslaciones y una rotación), o bien -si el edi…cio es de planta regular y con excentricidad de masas respecto al centro de torsión inferior al 10% de la dimensión en planta- dos modelos planos ortogonales independientes con un solo grado de libertad de traslación por planta (edi…cio de cortante). El procedimiento a seguier coincide con los principios generales expuestos en el segundo capítulo: ² Cálculo de los periodos propios (Ti ) y modos de vibración (Ái ) de la estructura. Se deberán incluir en el análisis los r primeros modos con contribución signi…cativa en el resultado (ecuaciones (2.69) o (2.70)) y como mínimo – Tres modos en el caso de modelos planos de la estructura (…gura 4.2). – Cuatro modos en el caso de modelos espaciales de la estructura, dos traslacionales y otros dos rotacionales. – Todos los modos de período superior a To (ecuación (4.4)). ² Determinación de la ordenadas espectrales ®(Ti ) correspondientes a los periodos propios de cada uno de los r modos (i = 1; 2 : : : r) c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. CAPÍTULO 4. NCSE-94: ACCIÓN SÍSMICA Y MÉTODOS DE CÁLCULO 39 Figura 4.2: Modos de vibración para un edi…cio de cortante ² Obtención de los desplazamientos modales máximos equivalente (ecuación (2.60)) para cada uno de los r modos. Sa j (4.8) ui jmax = ´ i 2 i !i donde el vector ´ i contiene los factores de distribución del modo i (ecuación (2.61)), ! i es la frecuencia natural del modo i y Sa ji es el valor del espectro de diseño para el período del modo i, i.e., el valor del espectro de aceleraciones incluyendo las correcciones por amortiguamiento y ductilidad (ecuación (4.6)) Sa ji = Âi (º; ¹)®(Ti )ac (4.9) º·i = ¯·i ¹ (4.10) siendo Âi (º; ¹) = donde ·i es un coe…ciente que adopta los siguientes valores ·i = 8 > > > > > < > > > > > : 1 ¯®(Ti ) ¹=º para Ti = 0 1 para Ti ¸ To f1 + [¯®(To ) ¡ 1] Ti =To g (4.11) para 0 < Ti < To ² Conocidos los deplazamientos modales en cada grado de libertad podemos calcular el resto de las variables modales y así obtener los valores máximos de la respuesta de la estructura para cada uno de los r modos. ² La respuesta total de la estructura se calcula ponderando las aportaciones de cada uno de los modos de acuerdo a los procedimientos descritos en las ecuaciones (2.71-2.73). c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. CAPÍTULO 4. NCSE-94: ACCIÓN SÍSMICA Y MÉTODOS DE CÁLCULO 40 De esta manera, y en el caso particular de los modelos habitualmente empleados para analizar estructuras de edi…cación, se obtienen unas solicitaciones de planta (dos fuerzas y un torsor si el modelo incluye tres grados de libertad por planta; una fuerza en el caso del edi…cio de cortante) para cada modo i que se deberán repartir entre los elementos estructurales: ² En proporción a las componentes utilizadas para la determinación del centro de torsión en el caso de haber considerado tres grados de libertad por planta, o ² Teniendo en cuenta la torsión accidental de planta provocada por la excentricidad de masas mínima …jada en la NCSE-94 para el caso del edi…cio de cortante. Dado que el anterior es un cálculo elástico y lineal que incorpora la realidad del comportamiento anelástico de la estructura a través de su coe…ciente de comportamiento por ductilidad, ¹, los desplazamientos dinámicos máximos que realmente se producen según los grados de libertad considerados en el modelo se deberán obtener como umax = ¹ue (4.12) siendo ue el desplazamiento lineal equivalente calculado en régimen elástico. 4.3.3 Método simpli…cado de cálculo para los casos más usuales de edi…cación Este método sólo es aplicable a las construcciones que cumplan la totalidad de los siguientes requisitos: ² El número de plantas es inferior a 20. ² La altura del edi…cio sobre rasante es inferior a 60 metros. ² Existe regularidad en planta, sin entrantes ni salientes importantes. ² Dispone de soportes continuos hasta cimentación, uniformemente distribuidos en planta y sin cambios bruscos en su rigidez. ² Dispone de regularidad geométrica en planta y altura (…guras 4.3 y 4.4) y de regularidad mecánica en la distribución de rigideces, resistencias y masas, de modo que los centros de masas, rigidez y torsión de todas la plantas están situados, aproximadamente, en la misma vertical. ² La excentricidad del centro de las masas que intervienen en el cálculo sísmico respecto al de torsión es inferior al 10% de la dimensión en planta del edi…cio en cada una de las direcciones principales. Bajo estas circunstancias la estructura se puede analizar mediante un modelo de edi…cio de cortante para dos direcciones ortogonales independientes. c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. CAPÍTULO 4. NCSE-94: ACCIÓN SÍSMICA Y MÉTODOS DE CÁLCULO Figura 4.3: Estructuras regulares en planta c Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. °A. 41 CAPÍTULO 4. NCSE-94: ACCIÓN SÍSMICA Y MÉTODOS DE CÁLCULO Figura 4.4: Estructuras regulares en alzado c Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. °A. 42 CAPÍTULO 4. NCSE-94: ACCIÓN SÍSMICA Y MÉTODOS DE CÁLCULO 43 Períodos propios y modos de vibración La NCSE-94 proporciona fórmulas empíricas que permiten obtener de manera simpli…cada estas características dinámicas de la estructura, así como el número de modos a incluir en el análisis. El período de cada modo i se obtiene como Ti = TF (2i ¡ 1) (4.13) donde TF es el período fundamental de la estructura, que se estima a partir de expresiones simpli…cadas que la NCSE-94 incluye. Así, e.g., para el caso de edi…cios de hormigón armado sin la colaboración de pantallas rigidizadoras TF = 0:09n (4.14) siendo n el número de plantas sobre rasante. Las componentes del modo de vibración Ái se obtienen como µ (2i ¡ 1) ¼hk Áik = sen 2H ¶ (4.15) donde hk es la altura sobre rasante de la planta k y H es la latura total de la edi…cación sobre rasante. En el caso del EC-8 sólo se considera el primer modo de vibración, i.e., el correspondiente al período fundamental TF . La forma modal se estima como Á1k = hk H (4.16) y la fórmula propuesta para el cálculo de TF en el caso de pórticos de hormigón armado di…ere de la proporcionada por la NCSE-94, especialmente para edi…cios de poca altura TF = 0:075H 3=4 (4.17) Fuerzas sísmicas La fuerza sísmica estática equivalente, Fik , correspondiente a la planta k y modo de vibración i se obtiene a partir de la ecuación (2.63) como Fik = sik Pk (4.18) Sa ji g (4.19) siendo el coe…ciente sísmico sik sik = ´ ik donde el espectro de diseño viene dado en este caso por Sa ji = ®1 (Ti )¯ac c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. (4.20) CAPÍTULO 4. NCSE-94: ACCIÓN SÍSMICA Y MÉTODOS DE CÁLCULO donde ¯= º ¹ 44 (4.21) es el denominado coe…ciente de respuesta y ®1 (Ti ) se determina a partir de las ordenadas espectrales ®(Ti ) como 8 > si T < To < ®(To ) (4.22) ®1 (Ti ) = > : ®(T ) si T ¸ To en el caso de los edi…cios de cortante, la expresión de los factores de distribución ´ik se simpli…ca a (ecuaciones (2.61) y (2.64)) Pn mk Áik 2 k=1 mk Áik ´ik = ¿ i Áik = Áik Pk=1 n (4.23) siendo mk la masa de la planta k. Sistema de fuerzas estáticas equivalentes Las fuerzas Fk con las que se va a proceder al cálculo de la estructura se determinan a partir de las fuerzas modales Fik como sigue: ² Obtención de los cortantes Vik de cada planta k en el modo i Vik = n X Fij (4.24) j=k ² Obtención del cortante combinado Vk de la planta k ponderando las contribuciones de cada modo (ecuaciones (2.71-2.73)) v u r uX Vk = t Vik2 (4.25) i=1 ² Obtención de fk por diferencias entre cortantes de plantas Fk = Vk ¡ Vk+1 (4.26) Efectos de torsión por excentricidad accidental El análisis de la estructura debe tener en cuenta la compatibilidad de deformaciones en planta de todos los elementos estructurales, incorporando el efectos de una posible excentricidad accidental c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. CAPÍTULO 4. NCSE-94: ACCIÓN SÍSMICA Y MÉTODOS DE CÁLCULO 45 Figura 4.5: Excentricidad en planta de la acción sísmica de las masas. En edi…cios simétricos la NCSE-94 permite sustituir este análisis por la aplicación a cada elemento estructural de un coe…ciente de mayoración adicional ° n (…gura 4.5) ° nx = 1 + 0:6y=by para sismo en dirección y (4.27) ° ny = 1 + 0:6x=bx para sismo en dirección x (4.28) siendo bx y by las dimensiones de la planta en direcciones x e y respectivamente y x e y las distancias del elemento considerado a los ejes de simetría. 4.4 Ejemplos A continuación se calcula el cortante en la base de una estructura sencilla de edi…cación empleando tanto el procedimeinto general como el método simpli…cado propuestos en la NCSE-94. La …gura 4.6 muestra un esquema del edi…cio considerado. Consta de cinco plantas y su tipología estructural responde a un edi…cio con pórticos de hormigón armado sin la colaboración de pantallas rigidizadoras y planta compartimentada. Se ubica en Sevilla, sobre un terreno de tipo II según la clasi…cación de la NCSE-94. Se trata de una construcción de normal importancia. La estructura es simétrica y totalmente regular, tanto en planta como en alzado, coincidiendo los centros de masa y torsión. En consecuencia, el edi…cio puede analizarse a través de dos modelos planos ortogonales independientes, cada uno de ellos con un sólo grado de libertad –de traslación– por planta (…gura 4.6). La estructura cumple la totalidad de los requisitos establecidos en la NCSE-94 para que el método simpli…cado sea de aplicación. c Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. °A. CAPÍTULO 4. NCSE-94: ACCIÓN SÍSMICA Y MÉTODOS DE CÁLCULO 46 1,04 cm 4m 1,04 cm 4m 1,04 cm 4m 5m 1,56 cm 5m 1,65 cm 5m 1,73 cm 5m 1,73 cm u5 m=134.4 t 3m k5 2 cm 35x35 cm u4 m=134.4 t 35x35 cm 2,16 cm 3m k4 u3 m=134.4 t 40x40 cm 2,16 cm 3m k3 u2 m=134.4 t k2 40x40 cm 2,16 cm 3m u1 m=134.4 t 4m 2,16 cm 45x45 cm k1 Figura 4.6: Edi…cio de 5 plantas y modelo dinámico empleado Información sísmica básica Puesto que la estructura se localiza en Sevilla capital, la aceleración sísmica básica y el coe…ciente de contribución vienen dados por ab = 0:07g = 0:69 m=s2 ; K = 1:0 (4.29) Al tratarse de una construcción de normal importancia, el coe…ciente de riesgo y, por consiguiente, la aceleración sísmica de cálculo se obtienen como ½=1 =) ac = ½ab = 0:69 m=s2 (4.30) El coe…ciente de suelo para un terreno de tipo II es C = 1:4 c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. (4.31) CAPÍTULO 4. NCSE-94: ACCIÓN SÍSMICA Y MÉTODOS DE CÁLCULO 47 Espectro elástico de respuesta Los parámetros para de…nir las ordenadas espectrales vienen dados por ®(To ) = (3C ¡ 3:8)(K ¡ 1:25) + 2:3 = 2:28 (4.32) To = 0:125C + 0:2K ¡ 0:175 = 0:24 s (4.33) T1 = 0:215K(5C ¡ 1) = 0:68 s ®(To ) (4.34) obteniéndose el espectro elástico ®(t) que se muestra en la …gura 4.7. En el caso del método simpli…cado se de…nen unas ordenadas espectrales ®1 (t), que coinciden con las anteriores salvo en el tramo de períodos cortos (0 · T < To ), según se muestra en la …gura 4.8. 3,0 2,7 α(T0) 2,4 2,1 α(T) 1,8 1,5 α(T)= α(T0)T1/T 1+[α(T0)-1]T/T0 1,2 0,9 0,6 0,3 T1=0.68 s T0=0.24 s 0,0 0,0 0,2 0,4 0,6 0,8 1,0 1,2 1,4 1,6 1,8 2,0 T Figura 4.7: Espectro elástico de respuesta 3,0 2,7 α(T0) 2,4 2,1 α(T) 1,8 α(T)=α(T0)T1/T 1,5 1,2 0,9 0,6 0,3 T1=0.68 s 0,0 0,0 0,2 0,4 0,6 0,8 1,0 1,2 1,4 1,6 1,8 2,0 T Figura 4.8: Espectro elástico de respuesta. Método simpli…cado c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. CAPÍTULO 4. NCSE-94: ACCIÓN SÍSMICA Y MÉTODOS DE CÁLCULO 48 Masas de cálculo Se considera una única planta tipo (incluyendo la cubierta): ² carga permanente (incluyendo sobrecarga de tabiquería): G = 500 Kg=m2 ² sobrecarga de utilización: Q = 200 Kg=m2 Resultando una masa de cálculo h i mk = (20 m £ 12 m) £ 500 Kg=m2 + 0:3 £ 200 Kg=m2 = 134400 Kg 4.4.1 (4.35) Método simpli…cado Períodos propios y modos de vibración El período fundamental viene dado por TF = 0:09 £ n = 0:45 s (4.36) Puesto que TF · 0:75 s basta con considerar el primer modo de vibración µ Á1k hk = sen ¼ 2H ¶ =) Á1 = 8 9 0:383 > > > > > > > > > < 0:634 > = 0:831 > > > > > 0:957 > > > > > : ; (4.37) 1:000 siendo hk la altura sobre rasante de la planta k y H = 16 m. Cálculo de las fuerzas sísmicas Para el primer modo F1k = s1k Pk (4.38) donde Pk es el peso correspondiente a la masa mk (Pk = 134400 Kp) y s1k es el coe…ciente sísmico correspondiente a la planta k en el primer modo µ s1k = ¶ ac ®1 (TF )¯´1k g (4.39) donde ®1 (T ) es la ordenada espectral considerada en el método simpli…cado (…gura 4.8) ®1 (TF ) = 2:28 c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. (4.40) CAPÍTULO 4. NCSE-94: ACCIÓN SÍSMICA Y MÉTODOS DE CÁLCULO 49 Suponiendo que la estructura es de ductilidad alta (¹ = 3) se tiene ¯ = 0:29 (4.41) obteniéndose los factores de distribución como P5 j=1 mj Á1j 2 j=1 mj Á1j ´ 1k = Á1k P5 ) ´1 = 8 9 0:462 > > > > > > > > > < 0:765 > = 1:002 > > > > > 1:154 > > > > > : ; (4.42) 1:206 y por tanto s1 = 8 9 0:021 > > > > > > > > > < 0:035 > = ) 0:046 > > > > > 0:053 > > > > > : ; F1 = 0:056 8 9 2822 > > > > > > > > > < 4704 > = 6182 > > > > > 7123 > > > > > : ; Kp (4.43) 7526 Dado que basta con incluir el primer modo en el análisis, el sistema de fuerzas estáticas equivalentes coincide con F1 (4.44) F = F1 Cortante en la base El cortante total en la base es directamente el del único modo considerado V1 = 5 X F1j = 28357 Kp ¼ 28:4 t (4.45) j=1 4.4.2 Procedimiento general Períodos propios y modos de vibración La rigidez equivalente al desplazamiento transversal de los pilares se obtiene para las distintas entreplantas como 12EIp1 = 2:56 £ 108 N=m L3p1 12EIp2 = 20 £ = 3:79 £ 108 N=m L3p2 12EIp4 = 20 £ = 2:22 £ 108 N=m L3p4 k1 = 20 £ kp1 = 20 £ (4.46) k2 = k3 = 20 £ kp2 (4.47) k4 = k5 = 20 £ kp4 c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. (4.48) CAPÍTULO 4. NCSE-94: ACCIÓN SÍSMICA Y MÉTODOS DE CÁLCULO 50 proporcionando una matriz de rigidez 0 B B B K = B B @ 0 B B B B B @ ¡k2 k2 + k3 ¡k3 0 0 k1 + k2 ¡k2 0 0 0 6:35 ¡3:79 0 0 0 ¡3:79 7:58 ¡3:79 0 0 0 ¡k3 k3 + k4 ¡k4 0 0 ¡3:79 6:01 ¡2:22 0 0 0 ¡k4 k4 + k5 ¡k5 0 0 ¡2:22 4:44 ¡2:22 0 0 0 ¡k5 k5 0 0 0 ¡2:22 2:22 1 C C C C= C A 1 C C C C £ 108 C A (4.49) La matriz de masa es diagonal y viene dada por 0 B B B M=B B @ 134400 0 0 0 0 0 134400 0 0 0 0 0 134400 0 0 0 0 0 134400 0 0 0 0 0 134400 1 C C C C C A (4.50) Las frecuencias naturales se obtienen a partir de la ecuación característica ¯ ¯ ¯ ¯ ¯K ¡ ! 2 M¯ = 0 ) ! 21 = 180:1 ; ! 22 = 1253:8 ; ! 23 = 3601:4 ; ! 24 = 5518:2 ; ! 25 = 9257:4 (4.51) lo que proporciona los siguientes períodos propios de la estructura T1 = 0:468 s ; T2 = 0:177 s ; T3 = 0:105 s ; T4 = 0:085 s ; T5 = 0:065 s (4.52) Los modos de vibración se obtienen como los autovalores del sistema Á1 = 8 9 0:199 > > > > > > > > > < 0:321 > = 0:422 > > > > > 0:549 > > > > > : ; 0:616 Á4 = ; Á2 = 8 0:529 > > > > > ¡0:148 < 9 > > > > > = > > > 0:590 > > : > > > > > ; ¡0:535 ¡0:252 8 0:440 > > > > > < 0:542 0:403 9 > > > > > = > > > > > ¡0:139 > > > > > : ; ; Á3 = ¡0:576 ; Á5 = 8 0:457 > > > > > ¡0:733 < 0:482 8 9 ¡0:528 > > > > > > > > > < ¡0:211 > = 0:375 > > > 0:558 > > : ¡0:474 > > > > > ; 9 > > > > > = > > > > > ¡0:143 > > > > > : ; (4.53) 0:031 Modos de vibración a considerar en el análisis Dado que la estructura se está analizando mediante un modelo plano, se deberán considerar al menos tres modos de vibración. c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. CAPÍTULO 4. NCSE-94: ACCIÓN SÍSMICA Y MÉTODOS DE CÁLCULO 51 Adicionalmente, se deben considerar los r primeros modos con contribución signi…cativa, i.e., aquellos para los que la suma de las masas efectivas sea superior al 90% de la masa movilizada en el movimiento sísmico r n X Mi¤ ¸ 0:90 i=1 X mi = 604800 Kg (4.54) i=1 donde las masas modales efectivas se calculan como M1¤ n X = mi ´1i = 596602 Kg (4.55) mi ´2i = 60346 Kg (4.56) i=1 n X M2¤ = i=1 por lo que según este criterio bastarían dos modos (r = 2). Por tanto, deben considerarse los tres primeros modos de vibración. Los factores de distribución asociados a estos tres modos son ´1 = 8 9 0:419 > > > > > > > > > < 0:676 > = 0:889 > > > > > 1:157 > > > > > : ; ; ´2 = 8 0:295 > > > > > < 0:363 9 > > > > > = 0:270 ; ´3 = > > > > > ¡0:093 > > > > > : ; ¡0:105 9 > > > > > = > > > > > ¡0:156 > > > > > : ; (4.57) 0:133 ¡0:386 1:298 8 0:148 > > > > > < 0:059 Desplazamientos modales máximos Los desplazamientos modales máximos se obtienen como ui jmax = ´ i Sa ji ! 2i (4.58) donde Sa ji = Âi (º; ¹)®(Ti )ac (4.59) º·i = ¯·i ¹ (4.60) siendo Âi (º; ¹) = Para una estructura de ductilidad alta y un amortiguamiento del 7% respecto al crítico µ º= 5 ¶0:4 = µ ¶0:4 5 7 = 0:874 ; ¹=3 ) ¯ = 0:29 (4.61) Las ordenadas espectrales adoptan los valores ®(T1 ) = 2:28 ; ®(T2 ) = 1:94 ; ®(T3 ) = 1:56 (4.62) Los valores de ·i se calculan a partir de (4.11), obteniéndose ·1 = 1 ; ·2 = 1:33 ; c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla. ·3 = 1:88 (4.63) CAPÍTULO 4. NCSE-94: ACCIÓN SÍSMICA Y MÉTODOS DE CÁLCULO 52 De esta manera, se obtienen los factores correctores Âi por ductilidad y amortiguamiento como Â1 = 0:29 ; Â2 = 0:39 ; Â3 = 0:55 (4.64) y los valores del espectro de aceleraciones como Sa j1 = 0:46 ; Sa j2 = 0:52 ; Sa j3 = 0:59 (4.65) Por tanto, los desplazamientos modales máximos son u1 jmax = 2:55 £ 10¡3 £ ´ 1 (4.66) u2 jmax = 4:15 £ 10¡4 £ ´ 2 (4.67) u3 jmax = 1:64 £ 10¡4 £ ´ 3 (4.68) Cortante en la base El valor del cortante modal máximo en la base del edi…cio para cada uno de los tres primeros modos se obtiene a partir de la ecuación de equilibrio del conjunto de pilares de planta baja como modo 1 : ³ ´ ³ ´ V11 = k1 £ u11 jmax = 2:56 £ 108 £ 2:55 £ 10¡3 £ 0:419 = 273523 N (4.69) modo 2 : ³ ´ ³ ´ V21 = k1 £ u21 jmax = 2:56 £ 108 £ 4:15 £ 10¡4 £ 0:295 = 31341 N modo 3 (4.70) : ³ ´ ³ ´ V31 = k1 £ u31 jmax = 2:56 £ 108 £ 1:64 £ 10¡4 £ 0:148 = 6214 N (4.71) El cortante en la base total se obtiene ponderando las aportaciones de cada uno de los tres modos v u 3 uX V1 = t Vi12 = 275383 N ¼ 27:5 t (4.72) i=1 Puede observarse el buen grado de aproximación proporcionado por el método simpli…cado. c °A. Sáez. Estructuras III. E.T.S. Arquitectura de Sevilla.