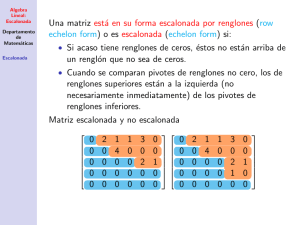
Una matriz está en su forma escalonada reducida por renglones si
Anuncio

Matrices Reducidas Una matriz está en su forma escalonada reducida por renglones si satisface las siguientes propiedades: 1. 2. 3. Los renglones consistentes únicamente con ceros estarán en los últimos renglones de la matriz. Leyendo cada renglón no cero de izquierda a derecha, el primer elemento distinto de cero se llama la entrada líder, y debe de ser un uno. Cada entrada líder estará colocada a la derecha de las entradas líderes de los renglones superiores. Cada columna que contenga una entrada líder uno debe tener ceros en lo que resta de la columna. Una matriz con las propiedades 1 y 2 se dice que está en forma escalonada. Las entradas líderes generan variables líderes y aquellas variables que no sean líderes se llaman variables libres o parámetros. El rango de una matriz es el número de renglones no cero en su forma escalonada reducida. Eliminación de Gauss. 1. 2. 3. Escribe la matriz aumentada del sistema de ecuaciones lineales. Utilice operaciones elementales por renglones para reducir la matriz aumentada a una matriz escalonada. Si el sistema es consistente, resuelve para las variables líderes en términos de las variables libres que restan. Eliminación de Gauss-Jordan. 4. 5. 6. Escribe la matriz aumentada del sistema de ecuaciones lineales. Utilice operaciones elementales por renglones para reducir la matriz aumentada a una matriz escalonada reducida. Si el sistema es consistente, resuelve para las variables líderes en términos de las variables libres que restan. Teorema del Rango Sea A la matriz de coeficientes de un sistema de ecuaciones lineales con n variables. Si el sistema es consistente, entonces Número de variables libres = n − Rango de A Definición. Un sistema de ecuaciones lineales se llama homogéneo si el término constante de cada ecuación es cero. Lema. Si un sistema homogéneo tiene m ecuaciones lineales y n variables, donde m < n, entonces el sistema tiene un número infinito de soluciones. Resolver el siguiente sistema de ecuaciones lineales usando el proceso de Gauss-Jordan. Determina las variables líderes, libres y rango. x1 2 x 2 3x3 9 1. 2 x1 x 2 x3 0 4 x1 x 2 x3 4 w x 2y z 1 w x y z 0 4. x y 1 w x z 2 1 x1 x 2 x3 6 x 4 2 2 2r s 3 1 1 4r s 7 3. x1 x 2 3 x 4 x5 1 2. 6 2 2r 5s 1 1 x1 2 x3 4 x5 8 3 5. Determina por inspección (sin hacer ningún cálculo) si el sistema lineal con la matriz aumentada dada tiene soluciones únicas, soluciones infinitas o no tiene soluciones. 1 2 3 4 0 7 8 0 5 6 9 10 11 12 0 ¿Para que valor(es) de k, si es que existen, el sistema tendrá (a) ninguna solución, (b) solución única, y (c) soluciones infinitas? x y kz 1 7. x ky z 1 kx y z 2 x ky 1 6. kx y 1 8. Encuentre las soluciones de los planos 3x 2 y z 1 y 2 x y 4 z 5 . 9. Determine si las líneas x = p + su intersección. 3 p= 1 , q= 0 1 1 , u= 1 y 1 0 , v = 1 x = q + tv se intersectan y, si lo hacen, encuentre el punto de 2 3 1 Soluciones 24 6 0 12 6 10 2 6 2 2 1. 5 , 2. , 3. 0 + r 1 + s 0 + t 0 , 4. No hay soluciones, 5. Infinidad de 1 1 0 0 0 1 0 1 0 0 Soluciones, 6. (a) No hay solución si k = ─1, (b) Solución única is k ≠ ± 1 (c) Infinidad de soluciones si k = 1, 7. (a) No hay soluciones si k = 1, (b) Solución única si k ≠ ─2, 1 (c) Infinidad de Soluciones si k = ─2, x 0 9 8. y 1 t 10 , z 1 7 9. No se intersectan.