Problema 11 - ingeniería de sistemas y automática
Anuncio

Autómatas
y Sistemas de Control
3o Ingeniería Industrial
Solución problema 11-control discreto (cálculo de parámetros de respuesta de
sistemas discretos)
z−0.2
Sistema G1 (z) = (z+0.2)(z−0.1)
Se trata de un sistema de segundo orden con dos polos reales en z1 = −0.2, z2 = 0.1.
Como el módulo de los polos es menor que 1, el sistema será estable y será posible
calcular los parámetros pedidos. Por no tener polos complejos conjugados no pueden
aplicarse las fórmulas vistas en teoría para un sistema estándar de segundo orden y
deberán calcularse los parámetros directamente. La salida ante escalón unitario es:
Y (z) =
z
z − 0.2
z 2 − 0.2z
z
· G1 (z) =
·
= 3
z−1
z − 1 (z + 0.2)(z − 0.1)
z − 0.9z 2 − 0.12z + 0.02
El valor nal de la salida es:
−1
y∞ = lı́m (1 − z −1 ) · Y (z) = lı́m (1−z
)·
z→1
z→1
=
1
−1 ·
(1−z
)
z − 0.2
=
(z + 0.2)(z − 0.1)
1 − 0.2
= 0.74
(1 + 0.2)(1 − 0.1)
El 5 % de este valor nal es 0.037, por tanto para calcular ns deberemos obtener el
instante de muestreo a partir del cual la salida se mantiene en el intervalo
[0.74 − 0.037, 0.74 + 0.037] = [0.703, 0.777]
Para calcular los parámetros pedidos obtendremos los valores de la secuencia y(k)
calculando la transformada Z inversa usando, por ejemplo, el método de la división
larga. La fdt en exponentes negativos de z es:
Y (z −1 ) =
z −1 − 0.2z −2
1 − 0.9z −1 − 0.12z −2 + 0.02z −3
Por el método de la división larga se obtiene la secuencia:
{y(k)} = {0, 1, 0.7, 0.75, 0.739, 0.7411, . . .}
de donde se deduce que
np = 1, ns = 3
0.1
Sistema G2 (z) = z−0.5
Se trata de un sistema de primer orden con el polo situado en z1 = 0.5. Como el
módulo de este polo es menor que 1, el sistema será estable y será posible calcular los
parámetros pedidos. La salida ante escalón unitario es:
Y (z) =
z
z
0.1
0.1z
· G2 (z) =
·
= 2
z−1
z − 1 z − 0.5
z − 1.5z + 0.5
1
El valor nal de la salida es:
−1
y∞ = lı́m (1 − z −1 ) · Y (z) = lı́m (1−z
)·
z→1
z→1
=
1
−1 · 2
(1−z
) z
0.1z
=
− 1.5z + 0.5
0.1
= 0.2
0.5
El 5 % de este valor nal es 0.01, por tanto para calcular ns deberemos obtener el
instante de muestreo a partir del cual la salida se mantiene en el intervalo
[0.2 − 0.01, 0.2 + 0.01] = [0.19, 0.21]
Para calcular los parámetros pedidos obtendremos los valores de la secuencia y(k)
calculando la transformada Z inversa usando, por ejemplo, el método de la división
larga. La fdt en exponentes negativos de z es:
Y (z −1 ) =
0.1z −1
1 − 1.5z −1 + 0.5z −2
Por el método de la división larga se obtiene la secuencia:
{y(k)} = {0, 0.1, 0.15, 0.175, 0.1875, 0.19375, . . .}
de donde se deduce que el sistema no presenta sobreoscilación (no tiene np ) y
ns = 5
0.3
Sistema G3 (z) = z2 +0.25
Este sistema es de segundo orden con polos complejos conjugados en z = ±0.5j .
Como estos dos polos están dentro del círculo unidad, el sistema es estable y pueden
calcularse los parámetros pedidos. Además, el sistema no tiene ningún cero y su
retardo es 2, por lo que pueden utilizarse las fórmulas correspondientes a un sistema
estándar de segundo orden vistas en teoría:
np =
π
,
θ
ns =
π
σ
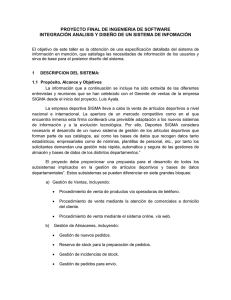
A partir de la gura 1 pueden obtenerse los valores de θ y σ :
• θ=
π
2
• e−σ = 0.5
⇒
−σ = ln 0.5
⇒
Por tanto:
np =
ns =
σ = 0.693
π
π
=
=2
θ
π/2
π
π
=
= 4.5
σ
0.693
⇒
np = 2, ns = 5
2
ns = 5
Figura 1:
Sistema G4 = zz+0.2
2 +0.49
Este sistema es de segundo orden con un par de polos complejos conjugados en
z = ±0.7j . Puesto que | ± 0.7j| < 1, el sistema es estable y es posible calcular
los parámetros pedidos. El sistema tiene un cero que no está situado en el origen, por
lo que no pueden aplicarse directamente las fórmulas vistas en teoría para un sistema
estándar de segundo orden. La salida ante escalón unitario es:
Y (z) =
z
z + 0.2
z 2 + 0.2z
z
· G4 (z) =
· 2
= 3
z−1
z − 1 z + 0.49
z − z 2 + 0.49z − 0.49
El valor nal de la salida es:
−1
y∞ = lı́m (1 − z −1 ) · Y (z) = lı́m (1−z
)·
z→1
z→1
=
1
−1
(1−z
)
·
z + 0.2
=
z 2 + 0.49
1 + 0.2
= 0.8
1 + 0.49
El 5 % de este valor nal es 0.04, por tanto para calcular ns deberemos obtener el
instante de muestreo a partir del cual la salida se mantiene en el intervalo
[0.8 − 0.04, 0.8 + 0.04] = [0.76, 0.84]
Para calcular los parámetros pedidos obtendremos los valores de la secuencia y(k)
calculando la transformada Z inversa usando, por ejemplo, el método de la división
larga. La fdt en exponentes negativos de z es:
Y (z −1 ) =
z −1 + 0.2z −2
1 − z −1 + 0.49z −2 − 0.49z −3
Por el método de la división larga se obtiene la secuencia:
{y(k)} = {0, 1, 1.2, 0.71, 0.612, 0.8521, 0.90012, 0.7824, 0.7590, 0.8166, . . .}
de donde se deduce que
np = 2, ns = 9
3
Sistema G5 (z) =
0.2
(z+0.1)(z+2)
Este sistema es inestable por tener un polo fuera del círculo unidad (z = −2). Por
tanto, no tiene sentido calcular los parámetros pedidos.
Resumiendo todos los resultados anteriores se tiene:
El orden en cuanto a intervalo de pico es:
G1 < G3 = G4
(G2 no tiene sobreoscilación y G5 es inestable)
y en cuanto a intervalo de establecimiento:
G1 < G2 = G3 < G4
(G5 es inestable)
Los valores concretos aparecen en la tabla siguiente:
G1
G2
G3
G4
G5
np
1
−
2
2
−
ns
3
5
5
9
−
→ no tiene sobreoscilación
→ inestable
4