Modelo de Nivel de Líquido
Anuncio

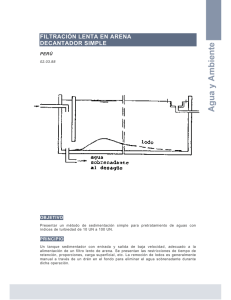
Sistemas de control 67-22 versión 2007 Página 1 de 10 Modelos de nivel de líquido. Buscamos una relación entre Q y H, por el teorema de Bernoulli tomemos la sección 1 en la superficie libre del tanque y la sección 2 en la salida, en ese caso ambas presiones son iguales a la ambiente. La diferencia de alturas es la profundidad del tanque H. Considerando que el fluido es un líquido incompresible tomamos un peso específico P γ 1 + J constante. 2 V + h1 = P2 + V 2 + h2 2g 2g γ 2 1 P1 = P2 = Pambiente h1 -h2 = H y llamamos E la relación de los diámetros de la salida y del tanque φ β= φ 2 1 teniendo en cuenta la ecuación de continuidad V • S =V • S 1 Modelos de Nivel de Líquidos 1 2 2 =Q pág. 1 Página 2 de 10 Sistemas de control 67-22 versión 2007 siendo la superficie de las secciones circulares S= π •φ 2 4 combinando estas últimas tres expresiones tenemos V =V • β 1 2 2 reemplazando esta expresión en la del teorema de Bernoulli y teniendo en cuenta la igualdad de las presiones a la ambiente en las secciones que tomamos queda 4 = 2 g • H 1 • − β V2 2 la velocidad de salida del líquido del tanque queda V2= 2g 1− β 4 • H entonces la expresión del caudal de salida es: Q =C D • S 2•V 2 = CD • S2 • 2g 1− β 4 • H Donde CD es el coeficiente de descarga que tiene en cuenta la eficiencia del orificio de salida agrupamos todo lo que antecede a la raíz de H como una constante K Q=K• H Modelos de Nivel de Líquidos pág. 2 Sistemas de control 67-22 versión 2007 Página 3 de 10 Representamos esta relación de raíz cuadrada (no lineal) . Tomemos el diferencial primero para linealizar la expresión del caudal ´ dQ dQ = q = • dh = K • h dh Q , H Definiremos dos conceptos que tienen aplicación cuando se hace la analogía del problema mecánico a un circuito eléctrico ( en general R,L ,C en distintas configuraciones): Capacitancia: es la razón entre el cambio en la cantidad de líquido acumulado y el cambio de nivel. Se hace esta interpretación puesto que en la ecuación diferencial ocupa el lugar de la superficie del tanque con lo cual se logra una equivalencia con el modelo de carga del capacitor en un circuito RC. Resistencia: es la razón entre el cambio en la diferencia de niveles y el cambio en el caudal de salida Suponemos el valor de la derivada en el punto de funcionamiento constante del valor K´ y a su inversa la llamamos R pues coincide con la resistencia que opone el orificio a la salida de fluido, 1 Modelos de Nivel de Líquidos q 0 h = R pág. 3 Página 4 de 10 Sistemas de control 67-22 versión 2007 las letras minúsculas indican variaciones alrededor del punto de funcionamiento, colocamos el subíndice “o” para simbolizar en este caso las variaciones del caudal de salida , y le colocaremos el subíndice i para simbolizar las variaciones del caudal de entrada El volumen que se acumula en el tanque es la integral del caudal entrante menos el saliente en el tiempo y un diferencial de volumen será dV = S • dh = [Q + q − (Q + q ]• dt i 1 o) A la superficie del tanque se la considera como la capacidad en este modelo por lo que S1 = C por otro lado los caudales de diseño entran sumando y restando , por lo que se cancelan quedando dh C• = q −q i o dt 2 si transformamos las expresiones 1 y 2 nos queda el siguiente sistema que nos permitirá despejar las variaciones del nivel en función del caudal modulado de entrada qo C ⋅ h ( s ) ⋅ s = qi ( s ) − qo ( s ) R ⋅ q 0( s ) = h( s ) despejemos la relación entre el caudal modulado qi(s) y el aumento de nivel h(s): C ⋅ h( s) ⋅ s = qi ( s) − h( s ) R 1 h( s) ⋅ C ⋅ s + = qi ( s) R Modelos de Nivel de Líquidos h( s ) R = qi ( s ) R ⋅ C ⋅ s + 1 pág. 4 Página 5 de 10 Sistemas de control 67-22 versión 2007 Sistemas con dos tanques Q+q H1 + h1 Tanque 1 H2 + h2 R1 C1 Q+q1 R2 C2 Tanque 2 Q+q2 Para resolver el problema planteo las expresiones de C y R para cada tanque. Tanque 1 C1 ⋅ dh1 = q − q1 dt (4) ⇒ (5) C1 ⋅ h1(s) ⋅ s = q (s) − q1(s) R1 = h1 − h 2 q1 ⇒ R1 ⋅ q1(s) = h1(s) − h 2(s) Modelos de Nivel de Líquidos (6) pág. 5 Página 6 de 10 Sistemas de control 67-22 versión 2007 Tanque 2 C2 ⋅ dh 2 = q1 − q 2 dt ⇒ C 2 ⋅ h 2(s) ⋅ s = q1(s) − q 2(s) R2 = (7) h2 q2 R 2 ⋅ q 2(s) = h 2(s) Con las ecuaciones transformadas (4), (5), (6) y (7) puedo calcular las distintas transferencias que me pidan por ejemplo: q 2(s ) q (s ) h 1( s ) h 2(s ) , q (s ) q (s ) q 2(s ) Si sequiere , se debe hacer : q (s ) , De (4) se eliminan las “h” utilizando (5) y (7).(**) De (6) se elimina h2(s) usando la (7). De lo que se obtiene se despeja q1(s) y se lo reemplaza en (**) y listo. q 2(s) 1 = q (s) C1 ⋅ R1 ⋅ C2 ⋅ R 2 ⋅ s 2 + (C1 ⋅ R1 + C1 ⋅ R 2 + C2 ⋅ R 2 ) ⋅ s + 1 Modelos de Nivel de Líquidos pág. 6 Sistemas de control 67-22 versión 2007 Página 7 de 10 Sistemas con realimentación Veamos en primer instancia como reacciona el tanque a una variación del valor deseado (Set point) en principio ya hemos deducido la transferencia del tanque en sí h R GT = = q1 C ⋅ R ⋅ s + 1 el diagrama de bloques sin considerar la perturbación será: Siendo G la productoria de las transferencias de la Rama directa es decir GC . GV . GT , y H la productoria de las transferencias de la rama inversa o de realimentación aplicamos la fórmula deducida para la transferencia total de lazo cerrado es decir: Modelos de Nivel de Líquidos pág. 7 Página 8 de 10 Sistemas de control 67-22 versión 2007 h h s ref G = 1+ G.H Demos valores literales a las transferencias y veamos a través del teorema del valor final de la transformada como corrige por ejemplo un algoritmo de control GC solo proporciona, cuando se da a href un escalón unitario. En estas condiciones tomamos una realimentación unitaria es decir admitimos que la transferencia de la rama de realimentación sea unitaria, de esta manera podemos comparar las variaciones que le damos al valor deseado directamente con la salida sin hacer adaptaciones de las magnitudes. Demos ganancias estáticas genéricas (sin considerarles dinámica alguna) a las transferencias del control y la válvula, admitiendo que reaccionan mucho mas rápido que el tanque. Entonces GC = Kp ganancia proporcional (algoritmo de control solo proporcional). Gv = Kv ganancia de la válvula (respuesta inmediata). GT es la transferencia del tanque ya vista, es decir la salida es el nivel y la entrada es el caudal que manipulamos a través de la válvula de control. Como hemos dicho la realimentación se toma unitaria H = 1 apliquemos la fórmula del lazo cerrado. • • G c GV G T hs = 1+GC•GV •GT •H • href Haciendo los reemplazos según los valores mencionados arriba queda hs = K K 1+ K C • K • c R RCS +1 R • •H V RCS +1 • V • S1 Operando sobre la misma nos queda • • K c KV R 1 = • hs R C S +1+ K C•K V •R S Modelos de Nivel de Líquidos pág. 8 Página 9 de 10 Sistemas de control 67-22 versión 2007 apliquemos entonces el teorema del valor final de la transformada del Laplace que vimos dice: lim t→ ∞ ( f t ) = lim s→ 0 (S • F S ) cual será entonces la salida del sistema cuando le pido que se modifique en una unidad S • K c• K V • R 1 • lims→0 R C S +1+ K C•K V •R S Vemos que el resultado es menor que la unidad que es lo que le solicitamos como valor deseado por lo que un algoritmo solo proporcional no corrige sin error a un sistema como el tanque que es de primer orden , mas adelante estudiaremos esto en mas detalle. K c• K V • R 1+ K C • K V • R < 1 En el caso de no modificar el valor deseado pero si se produce una perturbación como la indicada con NS en la figura al comenzar este tema en principio se debe deducir con álgebra de bloques la transferencia del nivel respecto de esa perturbación teniendo en cuenta el diagrama de bloques que vemos a continuación. GT = hs 1+GC•GV •GT • N s Modelos de Nivel de Líquidos pág. 9 Sistemas de control 67-22 versión 2007 Página 10 de 10 Si reemplazamos por los valores dados y aplicamos el teorema del valor final para un escalón unitario den NS sucede los siguiente hs = R 1 • R C S +1+ K C • K V • R S S •R 1 • limS →0 R C S +1+ K C•K V •R S que resulta nuevamente con un error permanente pues no debiera variar el valor de la variable controlada R >0 1+ K C • K V • R Vemos que cuanto mas ganancia KC en el controlador menor será el error permanente, la inversa de la carga R también influye , pero esta influencia disminuye al crecer. Vemos que la válvula tiene importancia en el control , si su funcionamiento no nos asegura un valor constante de KV o bien si este varía ,en forma no lineal ,o a saltos discretos tendremos ya respuestas que se van de la posibilidad de un análisis con estas herramientas matemáticas Modelos de Nivel de Líquidos pág. 10