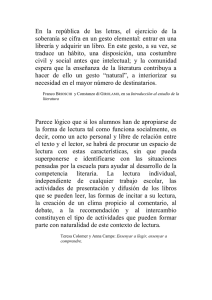
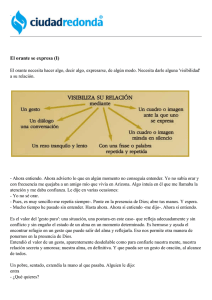
1 Análisis Dinámico del Gesto Alcanzar y Agarrar un Objeto en Individuos que Sufrieron un ACV. Guido Canalis*, Pablo Dieser*, Santiago Gomez Argüello†, Marcos Crespo† y Ariel Braidot* *Facultad de ingeniería UNER, [email protected], (+54)343 4975078 int. 121 Ruta 11 Km 10 Oro Verde-Entre Ríos. † Laboratorio de Marcha y Estudio de Movimiento, (FLENI) Escobar-Buenos Aires. Resumen— El gesto de alcanzar y agarrar requiere la integración del tronco, los brazos y los desplazamientos de la mano en un movimiento suave. La ejecución de estos movimientos se ve alterada en pacientes con hemiparesia espástica. En este trabajo se realiza un análisis dinámico del miembro superior de este gesto en personas que sufrieron un accidente cerebrovascular (ACV). La mayoría de los trabajos realizados sobre el gesto no poseen información sobre los momentos y fuerzas realizadas, los cuales son importantes para poder hacer un análisis más exacto del movimiento. Se analiza las posiciones en el tiempo de 13 marcadores colocados tanto en pacientes como en sujetos de control mientras realizan el gesto de alcanzar y agarrar un objeto con la mano. Estos datos se procesan para ingresarlos en el modelo inverso implementado en un software matemático. A partir de este análisis se puede obtener fuerzas y momentos que participan en los diferentes gestos que puede realizar el miembro superior, y así, poder identificar anomalías en el gesto. Este modelo podrá ser de mucha utilidad en los programas de rehabilitación de pacientes con algún tipo de discapacidad en el miembro superior, por ejemplo accidente cerebro-vasculares. Además el uso complementario de estos modelos permitirá estimar con mayor eficacia el problema a tratar y cuantificar el grado de lesión en términos de la capacidad motriz. Por ejemplo se podrían programar las rutinas de rehabilitación considerando la información dinámica de la actividad de los músculos durante un gesto estándar de la vida cotidiana como lo es alcanzar y agarrar. Palabras clave— Modelo dinámico, Miembro superior, Alcanzar y agarrar. Referencia— “Este trabajo se realiza en el Laboratorio de Biomecánica de la Facultad de Ingeniería-UNER en colaboración con el Instituto Fleni”. I. INTRODUCCIÓN L os accidentes cerebrovasculares (ACV), en inglés “stroke”, representan la tercera causa de muerte en la mayoría de los países desarrollados. Del total de eventos vasculares cerebrales dos tercios ocurren en países en vías de desarrollo. Sin embargo, en América Latina existen pocos estudios epidemiológicos con base poblacional y la mayor parte de la información disponible proviene de registros hospitalarios [6]. Un accidente cerebrovascular sucede cuando el flujo sanguíneo a una parte del cerebro se interrumpe debido a que un vaso sanguíneo en este órgano se bloquea o se rompe. Hay dos tipos principales de accidente cerebrovascular: accidente cerebrovascular isquémico y accidente cerebrovascular hemorrágico. Accidente cerebrovascular isquémico: El accidente cerebrovascular isquémico ocurre cuando un vaso sanguíneo que irriga sangre al cerebro resulta bloqueado por un coágulo de sangre. Accidente cerebrovascular hemorrágico: Un accidente cerebrovascular hemorrágico ocurre cuando un vaso sanguíneo en parte del cerebro se debilita y se rompe, provocando que la sangre se escape hacia el cerebro. Una de las consecuencia más comunes de accidente cerebrovascular es la hemiparesia. En general, el miembro superior parético presenta un déficit de la función motora superior a la extremidad inferior [4]. El patrón típico que presenta el miembro superior espástico de los pacientes que han sufrido un ACV es el siguiente: aducción y rotación interna de hombro. flexión de codo. pronación de antebrazo. flexión de muñeca y dedos. La habilidad de alcanzar y agarrar un objeto es muy importante para el desempeño normal de las personas en las actividades cotidianas de la vida [6]. El tratamiento y la intervención a menudo se centran principalmente en la extremidad inferior, para desarrollar y mejorar la capacidad de caminar de la persona. Sin embargo, la disfunción de las extremidades superiores puede ser igualmente discapacitante, porque afecta todos los días a las tareas funcionales que implican alcanzar, agarrar y manipular objetos [4]. En el ámbito clínico hay una gran variedad de pruebas, pero la deficiencia que estas pruebas presentan es que únicamente proporcionan información sobre la velocidad de la ejecución de la tarea [8]. Por lo cual es necesario el análisis cinemático para obtener mayores resultados, éste ofrece a los médicos una herramienta de medición fiable y objetiva que se puede utilizar para cuantificar los cambios en el movimiento, esta tecnología no siempre es aplicada al análisis de movimiento de las extremidades superiores [5]. La mayoría de los trabajos realizados sobre el gesto no poseen información sobre los momentos y fuerzas realizadas, los cuales son importantes para poder hacer un análisis más exacto del movimiento. El análisis cinemático y dinámico del gesto de alcanzar y agarrar han sido realizados por Randall et al. [2] en el cual a diferencia de 2 este trabajo los pacientes realizan el gesto con el troco muñeca y dedos inmovilizados. En este trabajo se registran las posiciones en el tiempo de 13 marcadores colocados tanto en pacientes como en sujetos de control. En todos los caso los individuos fueron instruidos para realizan el gesto de alcanzar y agarrar un objeto con la mano. Estos datos se procesan para ingresarlos en el modelo inverso implementado en un software matemático. A partir de este análisis se puede obtener fuerzas y momentos que participan en los diferentes gestos que puede realizar el miembro superior, y así, poder identificar anomalías musculo-esqueléticas en el gesto. Este modelo podrá ser de mucha utilidad en los programas de rehabilitación de pacientes con algún tipo de discapacidad en el miembro superior, por ejemplo accidente cerebro vasculares. Además el uso complementario de estos modelos permitirá estimar con mayor eficacia el problema a tratar y cuantificar el grado de lesión en términos de la capacidad motriz. Por ejemplo se podrían programar las rutinas de rehabilitación considerando la información dinámica de la actividad de los músculos durante un gesto estándar de la vida cotidiana como lo es alcanzar y agarrar. II. observa en la Fig. 2. En este trabajo, considerando que la adquisición se realizó con el sujeto en una posición diferente, en la cual no se utilizan todos los marcadores de la Fig. 2 como se observa en la Fig. 3, se debió desarrollar un método de estimación para poder ubicar los centros articulares, la orientación de los segmentos y sus parámetros antropométricos. Fig. 2: Posición de la persona para la ubicación de los centros articulares en la bibliografía [3]. METODOLOGÍA Los datos cinemáticos del tronco y miembrosuperior se adquirieron mediante un sistema deanálisis de movimiento (ELITE-BTS, Italia).Seis cámaras infrarrojas con una frecuencia deadquisición de 100 Hz se utilizaron para registrarla posición de 13 marcadores reflectivos ubicados en (ver Fig. 1): C7: Cervical 7, ACL, ACR: Acromion Left y Right, EST: Manubrio esternal, SACR: Segunda sacra, ASISL, ASISR: Cresta ilíaca Left and Right, OL_R: Elecranon Derecho, ER_R: Estiloides Radial, EU_R: Estiloides Ulnar, 3M_R: Cabeza del 3 metacarpo, IND: Falange distal del Indice, PUL: Falange distal del pulgar. El sujeto inicia su movimiento desde la posición de reposo (ver Fig. 3) para alcanzar el primer objeto delante de él a velocidad confortable. El gesto termina cuando alcanza el objeto. Fig.1: Posición de los marcadores Estos datos se procesan para ingresarlos en el modelo inverso implementado en un software matemático [1]. Para el procesamiento de los datos adquiridos se usó un filtro butterworth de orden 3 y frecuencia de 6 Hz. Para el desarrollo del modelo se empezó calculando los centros articulares del hombro, codo y muñeca, en base a la bibliografía estudiada [3]. En aquel trabajo [3] los centros articulares se identifican con el sujeto en la posición que se Fig. 3: Posición de la persona al iniciar el gesto en este trabajo. Una vez encontrado los centros articulares es necesario encontrar la orientación espacial de cada uno de los segmentos involucrados en la gesto de alcanzar y agarrar, para encontrar esta dirección se debe generar un sistema de ejes de referencia local enclavados en los centros de gravedad de cada segmento, es decir los i, j y k de cada segmento. Se procedió al cálculo de los ángulos relativos de cada uno de las articulaciones en sus tres ejes de rotación que describen el movimiento. Así se definen a los ángulos relativos de cada articulación como una rotación del segmento distal relativa al segmento proximal. Para ello es necesario la definición de un eje articular I. k= flexión- extensión i= rotación interna-externa = abducción- aducción Entonces los ángulos relativos de cada segmento quedan definidos por: = flexión- extensión = abducción-aducción = rotación interna-externa 3 Como el movimiento de los segmentos en el espacio tiene 6 grados de libertad, para poder estudiar la dinámica del movimiento, se requieren 6 coordenadas independientes. Tres variables corresponden a los centros de masa en coordenadas globales XYZ y tres son los ángulos de rotación conocidos como ángulos de Euler (φ, θ, ψ) [1]. Posteriormente se obtuvo la primera deriva y la segunda derivada de éstos ángulos utilizando los coeficientes de Savitsky y Golay de 19 parámetros [5]. Las cuales sirven para poder calcular las velocidades y aceleraciones angulares las que permitirán estimar posteriormente la derivada de los momentos angulares. Para el cálculo de la derivada de los momentos angulares también se requieren los momentos inerciales de cada segmento en los tres ejes. Finalmente para obtener los momentos se necesita calcular las fuerzas actuantes en las articulaciones del hombro, codo y muñeca. Un detalle de la evaluación del modelo se presenta en el Apéndice. El modelo se evalúa empleando el registro de 10 sujetos de control y en esta primer etapa 5 pacientes con ACV, en todos los casos se registraron 10 repeticiones del gesto. III. importante diferencia (figuras cinemáticas, no mostradas en este trabajo) que son una probable causa del aumento de las fuerzas en los tres planos que ejercen los paciente con ACV. Fig.5: Fuerzas globales en el codo RESULTADOS Y DISCUSIÓN La evaluación dinámica del gesto de alcanzar y agarrar es el aspecto más novedoso considerando que no se poseen resultados hasta el momento. Para valorar el modelo propuesto se presenta en las Figs. 4-6 las fuerzas actuantes en las articulaciones del hombro, codo y muñeca durante el gesto para una repetición del gesto de un individuo de control y un paciente. En las tres figuras las fuerzas se reportan normalizadas con el peso del sujeto control/paciente respecto del segmento distal. Se aprecia que la fuerza vertical tiene un valor continuo distinto de 0 previo y posterior al gesto. Esto claramente se corresponde con el sostenimiento contra la gravedad que ejerce el segmento proximal sobre el distal. Las fuerzas mediallateral y anterior tienen valor 0 previo y luego de terminado el gesto. Fig.6: Fuerzas globales en la muñeca IV. CONCLUSIÓN Y TRABAJOS FUTUROS Este primer trabajo nos sirvió para una primera valoración de las diferencias entre paciente con ACV y sujetos de control cuando realizan el gesto de alcanzar y agarrar. La evaluación de las fuerzas en un paciente y en un sujeto de control es la primera etapa del análisis de la dinámica del movimiento. En una segunda etapa se realizará el análisis de la población completa en estudio y se obtendrán los momentos musculares netos para un mayor análisis. APÉNDICE Fig.4: Fuerzas globales en el hombro. En el paciente las fuerzas normalizadas en sus tres componentes y en las tres articulaciones presenta la misma morfología que las fuerzas ejercidas por el sujeto control. No obstante la amplitud en todos los casos es considerablemente mayor en el paciente. Es probable que este incremento de fuerza esté relacionado con la dificultad de los pacientes con ACV de realizar un movimiento suave. Asimismo, la diferencia en el recorrido a lo largo del gesto de los pacientes respecto del grupo de control es otra Centros articulares Centro articular del hombro: El centro articular del hombro está ubicado por debajo del acromion un 17% de la distancia entre los marcadores ACR y ACL en dirección del eje Z. A partir de esta metodología se consideró que el centro articular se encontraba en la dirección del brazo sobre el plano YZ (Fig. 3) en el instante cero. Se obtienen dos vectores u y v en el instante cero, t=0. ( ) = = ( (‖ ( (‖ − 7) ; − 7‖) − − ) ; ‖) = ( ) = ( 7− (‖ 7 − ; ) ; ‖) 4 Se establece la proyección (alfa y beta) respecto del vector OLR-ACR de longitud0.17*ACR-ACL. ℎ = ‖( =− ( (‖ ) ; ‖) − − )‖ ∗ 0.17; − ( = (‖ = ∗ ; ) ; ‖) − − = ℎ∗ = ; = ; = ; ∗ ; Mano: Luego los vectores u y v de los instantes posteriores de tiempo t≠ 0 son utilizados para obtener el vector que posiciona el centro articular a partir del marcador ACR. = = ∗ + ∗ ; + ; − )‖ ∗ ( = (‖ − − ) ; ‖) = ( = (‖ = = + − − ∗( ) ; ‖) ; − 2 + ( (‖ − − = = ( (‖ − − ; + 0.43 ∗ ( = ); − + 0.79 ∗ (3 = ); − ); − Ángulos relativos[1] ó k = ; k Muñeca: = sin ( = sin ( ); ); ∗ ∗ ); ∗ ); ∗ ñ ); ∗ ); ∗ Ángulos de Euler[1] ; = sin ∗ = sin ∗ ; ; ∗ ; Velocidades angulares[1] = ̇ sin sin + ̇ cos ; = ̇ sin cos − ̇ sin ; = ̇ cos + ̇ ; ) ; ‖) = Antebrazo: = = + 0.436 ∗ ( = = sin ) ; ‖) ; ; = Brazo: − − ) ; ‖) − − Centros de gravedad Los centros de gravedad se estimaron [7], ; Ejes de referencia local ( = (‖ (3 (‖3 Codo: = − cos ( = cos ( ); Centro articular de la muñeca: Para estimar el centro articular de la muñeca durante el gesto se ubicó el centro en la posición media entre los marcadores EUR y ERR. = = ) ; ‖) −3 −3 Hombro: = sin ( = sin ( (0.06 + 0.13 ) ; ; ( (‖ = Centro articular del codo: Para estimar el centro articular del codo se calcula un vector con el producto cruz entre los vectores ACR-OLR y OLR-EUR, luego se hace el producto cruz entre este vector y el vector OLR-EUR, obteniendo de esta manera un vector que tiene una dirección aproximada al vector hacia la ubicación del centro articular del codo.Considerando las tablas antropométricas [4] se ubica el centro articular del codo un 6% en dirección del eje Y y un 13% en dirección del eje Z de la longitud del vector OLR-EUR desde el marcador OLR. Se obtiene la longitud .Se multiplicó el vector obtenido por el producto cruz entre w y u con , obteniéndose el desplazamiento desde el marcador OLR, finalmente se obtiene el centro articular centroc. = ‖( = ) ; ‖) ; Aceleraciones angulares[1] = ̈ sin sin + ̇ ̇ cos sin + ̇ ̇ sin cos + ̈ cos − ̇ ̇ sin ; 5 = ̈ sin cos + ̇ ̇ cos cos − ̇ ̇ sin sin − ̈ sin − ̇ ̇ cos ; Fuerzas[1] = ̈ cos − ̇ ̇ sin + ̈ ; Momentos inerciales y masas Los mismos fueron estimados [9]: = + ∗ + ∗ ó = ó = ó = ∗ ̈ . ∗ ̈ . ∗ ̈ b0 -232 -67.9 -13.68 . ; + 9.81 ∗ . ; . Momentos[1] = ; ; ó Para los momentos inerciales Eje transversal brazo antebrazo mano ; . ó b1 1.525 0.855 0.088 ̇ = ∗ b2 1.343 0.376 0.0092 . − . ; ó ̇ = ∗ . − . ; Eje anteroposterior ó b0 -250.7 -64.0 -19.45 brazo antebrazo mano b1 1.560 0.945 0.017 = ∗ b2 1.512 0.341 0.116 b0 -16.9 5.66 -6.26 b1 0.662 0.306 0.076 b2 0.044 -0.088 0.035 b1 0.0301 0.0145 0.0036 Derivada del momento angular[1] ̇ = + − [2] b2 -0.0027 -0.0011 0.0018 [3] [4] [5] [6] ; [7] = [8] [9] ; ̇ = + − ; ̇ Y la del segmento de la siguiente manera: = ̇ + ̇ + ̇ ; . ; ó ó ó ∗ ∗ ∗ . . . ; REFERENCIAS ̇ + − − ó [1] b0 0.250 0.319 -0.117 brazo antebrazo mano . = + + Eje longitudinal brazo antebrazo mano Para la masa ̇ C. Vaughan, B. L. Davis, and J. C. O´Connor, “Dynamics of Human Gait”.Kiboho , vol. II.L. 1999. F. Randall, Julius P., Dewald W., Zev Rymer. “Deficits in the coordination of multijoint arm movements in patientswith hemiparesis: evidence for disturbed control of limb dynamics”. Exp Brain Res. pp. 305-319, 2000. G. Rab K Petuskey, A. Bagley “A method for determination of upper extremity kinematics”, Gait and Posture, Vol. 15 pp. 113-119, 2002. H. Mackey, et al “Reliability of upper and lower limb threedimensional kinematics in children with hemiplegia”, Gait and Posture, Vol. 22 pp. 1–9, 2005. J. C. Russ, “The Image Processing Handbook”, Third Edition, CRC Press, New York, 1999. J.Rojas C. zurru, L. Patrucco, M Romano, P. Riccio,“Registro de enfermedad cerebrovascular isquémica”. Medicina,Vol. 66 pp. 547551. 2006. P. Leva “Adjustments to Zatsiorky-Seluyanov’s Segment Inertia Parameters ”, J. Biomechanics, Vol. 29 pp. 1223-1230. 1996. S. McPhee. “Functional hand evaluations: A review. American Journal of Occupational Therapy”, Am J Occup Ther, Vol.41, 1987. V.M. Zatsiorsky et al. “Method of determining mass inertial characteristics of human body segment”. Journal: Contemporary problems of Biomechanics pag 272-291, 1990.
 0
0
Anuncio
Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados