Control Remoto de la Dirección de un Carro
Anuncio

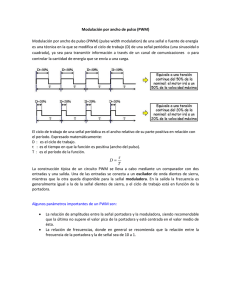
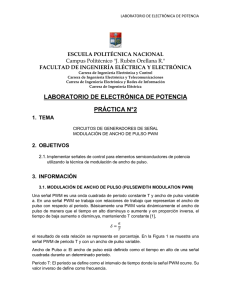
Control Remoto de la Dirección de un Carro Oscar Degracia Javier Murillo Wilber Hernández Universidad Tecnológica de Panamá Resumen- Este proyecto describe una de las aplicaciones de los servomotores en los sistemas de control, hemos tomado un carro al cual le diseñamos un control remoto que controla la dirección. PWM la cual se varía el ciclo de trabajo. El modelo usado fue el S3003 de la marca Futaba, es uno de más accesible en el mercado. En la figura 1 se muestra el servomotor utilizado. Palabras claves- servomotor, control de motor DC, generador de PWM. 1. Introducción General mente la dirección de giro de los autos a control remoto es controlada por un motor cc pero esto también se puede lograr con un servomotor. Los servomotores nos brindan una característica que los motores de corriente continua no tiene que es el control no solo de velocidad, sino también el control de la posición de giro mediante pulsos PWM. El control de la dirección de giro de un servo motor es muy simple y hay diversos circuitos para lograr esto pero surge un problema y es ¿Cómo implementar esto? Y ¿Cómo incluyo el control de la dirección de giro en el control del usuario?. En base estas dos preguntas desarrollamos este proyecto tratando de encontrar las mejores repuestas a estas interrogantes. 2. Materiales y métodos Los elementos utilizados para el desarrollo del proyecto son: un sevomotor, un chasis de un carro defectuoso, circuito generador de un pulso PWM y un circuito para el control de un motor DC (tracción). Servomotor: es un dispositivo similar a un motor de corriente continua que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación, y mantenerse estable en dicha posición. Es decir que consta con la capacidad de ser controlado, tanto en velocidad como en posición. Este control de posición y velocidad se hace mediante una señal Figura 1. Servomotor El chasis del carro, este fue donado de un juguete descompuesto el cual todavía contenía el motor DC para la tracción con un juego de engranes para ajustar la velocidad del carro, ya que el motor DC gira a una velocidad alta. Para el circuito generador del pulso PWM un circuito integrado LM555 en configuración astable. Para poder cambiar el ancho de pulso se colocó un potenciómetro entre las resistencias para así variar las constantes de tiempos y de esta forma variar el ciclo de trabajo. Las constantes de tiempo deben poder ser variadas para lograr que el pulso necesario para poder activar el servomotor. El diodo colocado entre los terminales 6 y 7 del CI es debido a que la señal de salida del integrado es de polaridad inversa de la deseada, es decir el pulso deseado aparecía como un pulso bajo y el no deseado como pulso alto. Al colocar el diodo este nos invierte la señal de salida a la forma deseada para poder controlar el servomotor. En la figura 2 se muestra el diagrama del circuito generador de PWM. Jornada de Actualización Tecnológica 2011 Facultad de Ingeniería Eléctrica Los diodos anti paralelos entre los colectores y emisores son de protección porque el motor es una carga inductiva. En la figura 4 se muestra el diagrama de bloque del sistema de control que armamos de los cuales solo faltaría explicar cómo adaptamos el servomotor a las paletas que controlan la dirección de las ruedas delanteras del carro. Figura PWM. 2. Esquema del circuito generador de Del esquema anterior se deducen las constantes de tiempos presentadas en la ecuación 1 y 2. (1) Figura 4. Diagrama de bloques del sistema (2) La ecuación 1 es para el pulso corto y la ecuación 2 para el pulso largo. El circuito para el control de motor DC se utiliza para controlar el sentido de giro, o sea que el carro avance hacia delante y hacia detrás. En la 3 se muestra el esquema del puente H utilizado para tal función. 4. Resultados Para esto se fabricó un elemento que linealizará el movimiento circular del servomotor. Este fue un reto al momento del diseño, el cual fue por ensayo y erro. Hasta que se obtuvo el elemento de la figura 5, el cual es funcional. . Figura 3. Esquema del circuito para controlar el sentido de la marcha. Figura 4. Paletas directrices De la figura anterior se puede deducir que para que el motor gire en un sentido se debe activar el transistor Q7 y Q3 para ello se le da un pulso a la base del transistor Q6. Para cambiar el sentido de giro se le da el pulso a Q1 para que active los transistores Q4 y Q8 para cambiar la polaridad de voltaje aplicada al motor. El circuito generador de la señal PWM se montó en un mando a distancia del cual se conectó al carro mediante 4 cables, uno para la señal PWM, dos para los pulso que accionarían el motor DC y el ultimo para la referencia ya que el mando y el carro tienen alimentaciones diferentes. Jornada de Actualización Tecnológica 2011 Facultad de Ingeniería Eléctrica El mando utiliza una fuente de 9 voltio (batería) el cual es bajado a 5 voltios con el uso del regulador LM3405 para alimentar el CI LM555 para que generar el pulso PWM a un voltaje dentro del rango aceptable del servomotor. El carro utiliza una alimentación de 6 voltios (4 baterías de 1.5 voltios en serie) para el motor DC y el servomotor. Figura 6. Carro funcional. Este prototipo tiene un alcance un radio de 3 metros desde el mando. Figura 5. Juego de engranes. En la figura 6 se muestra el juego de engranes que se utilizó para disminuir la velocidad del eje de tracción y aumentar el par, para así obtener una mayor fuerza a una menor velocidad. Al ensamblar todo lo anterior descrito obtenemos el carro de la figura 7 (sin carrocería). 1. Recomendaciones Durante el desarrollo del proyecto se surgieron algunas ideas que se le podrían aplicar para mejorar su funcionamiento. Una de esta idea es con respecto al circuito que controla al motor DC es utilizar MOSFET de potencia en el puente H para reducir sus pérdidas en conducción y así prolongar la duración de las baterías. Uno de los puntos más importante que se puede mejorar es el de la conexión del mando con el carro se debería de usar circuitos de radio frecuencia donde sugerimos el uso del par de integrados CI LM1871 (para el transmisor, mando) y el LM1872 (para el receptor, carro). Esto se debe por poder tener cuatros canales dos canales on-off y dos canales análogos (PWM). Esto aumentaría el rango de alcancé considerablemente. Jornada de Actualización Tecnológica 2011 Facultad de Ingeniería Eléctrica