Subsistema de Navegació
Anuncio

Prof. Xavier Estopà
Subsistema de Navegació
Tendència actual i tecnologies
presents i futures.
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
1
Prof. Xavier Estopà
Introducció
• Conjunt d’elements i sistemes de guiatge
que utilitza una aeronau per determinar la
seva posició i seguir unes rutes de
manera conscient.
– Sistemes basats a terra.
– Sistemes basats en satèl·lits.
– Sistemes autònoms.
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
2
Prof. Xavier Estopà
Introducció
• Estratègia europea encaminada a emprar
el GNSS en totes les fases del vol.
• Sistemes d’augmentació.
• Rutes 4D. Business trajectories (SESAR).
• Increment de protagonisme del DME.
• Tractament especial de les aproximacions a
aeroport.
• Impacte ambiental i econòmic.
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
3
Prof. Xavier Estopà
Fites temporals
• 2015. Millora de la xarxa DME i
equipament adequat en aeronaus.
• 2015-2020. Increment de sistemes basats
en GNSS.
– Aterratge CAT-I
– RNAV amb redundància DME.
– ILS per a CAT-III.
• 2020. Aterratge GLS (CAT-III).
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
4
Prof. Xavier Estopà
Equipament a les aeronaus
• Prudència en la concreció dels estàndards.
– Les decisions s’ajornen.
– Impaciència davant les múltiples possibilitats
tecnològiques.
• Preocupació dels fabricants i companyies
aèries.
– No es comencen a fabricar equips fins que es
coneix quin serà l’estàndard escollit.
– Les inversions s’acumulen al final del cicle.
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
5
Prof. Xavier Estopà
Sistemes actuals.
• Sistemes basats a terra.
– Ús exclusiu per a la navegació aèria.
• Prestacions i disponibilitat sota control.
– La seva quantitat dependrà de la orografia i
del número d’aeroports.
– Àrea d’influència desigual.
• Centrats en alguna de les fases del vol.
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
6
Prof. Xavier Estopà
Sistemes actuals.
• Sistemes basats a terra.
– Tipus d’informació subministrada:
• Direcció sobre el pla horitzontal. NDB, VOR.
• Distància entre el sistema i l’aeronau. DME.
• Línia d’orientació amb component horitzontal i
vertical. ILS.
• Combinacions dels anteriors.
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
7
Prof. Xavier Estopà
Sistemes actuals
• Sistemes inercials.
– Autònoms. Acceleròmetres i giròscops.
– Cal ajust inicial. Degeneren amb el temps i el
tipus de maniobres.
– Molt millor si es complementen amb GNSS.
• GNSS.
– Constel·lacions GPS, Glonass, Galileo,...
– Sistemes d’augmentació.
16/09/2010
8
Prof. Xavier Estopà
Detectors de direcció
• Inicialment, disponibilitat de sistemes per
detectar l’origen de senyals ràdio.
– RDF (radio direction finding).
– Facilitat per embarcar sistemes RDF a bord.
• Actualment, amb tecnologia evolucionada,
segueixent essent funcionals.
– Radiogoniometria.
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
9
Prof. Xavier Estopà
NDB (Non directional beacon)
• Radien omnidireccional un senyal modulat
pel codi identificatiu.
• Marge de freqüències: de 200 a 1600 kHz.
– Abast més enllà de la línia de visió.
– Facilitat d’ús de detectors de direcció.
• Determinació de la demora.
• Indiquen l’inici d’una aproximació a
aeroport.
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
10
Prof. Xavier Estopà
NDB (Non directional beacon)
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
11
Prof. Xavier Estopà
NDB (Non directional beacon)
•
•
•
•
Transmissor LF /MF. Redundància.
Modulador d’indicador (3 símbols morse).
Acoblador d’antena.
Antena.
• Sistema d’alimentació auxiliar.
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
12
Prof. Xavier Estopà
NDB (Non directional beacon)
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
13
Prof. Xavier Estopà
NDB
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
14
Prof. Xavier Estopà
NDB
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
15
Prof. Xavier Estopà
NDB
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
16
Prof. Xavier Estopà
NDB.
Antena margarita.
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
17
Prof. Xavier Estopà
NDB. Grup electrògen.
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
18
Prof. Xavier Estopà
Antena de
marker beacon
• 75 MHz.
• Senyal de “punt de
pas” en una trajectòria.
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
19
Prof. Xavier Estopà
Subsistema de Navegació
DME / TACAN
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
1
Prof. Xavier Estopà
Radiotelemetria
• Mesura de la distància entre dos punts.
– a partir del temps que un senyal o soroll
necessita per propagar-se entre ells.
– cal conèixer la velocitat de propagació.
• Dificultat d’establir referència de temps
comú.
– Des d’un dels punts es fixa l’instant inicial i
s’avalua la distància.
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
2
Prof. Xavier Estopà
Radiotelemetria
• La pertorbació es pot emetre de manera
continuada o a impulsos.
• radar d’ona contínua (altimetria)
• radar d’impulsos (vigilància i DME).
• Interrogació – resposta.
• Eco passiu.
• rebot del senyal a l’obstacle.
• detecció primària.
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
3
Prof. Xavier Estopà
Radiotelemetria
• Eco cooperatiu.
– Captació de la interrogació,
– identificació de la interrogació,
– devolució en condicions pre-establertes.
– Detecció secundària.
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
4
Prof. Xavier Estopà
DME
• Distance measurement equipment.
• Permet determinar la distància a la que es
troba l’avió de l’estació que tingui
sintonitzada.
• Habitualment co-ubicat amb un VOR.
– Sistema (rho,theta) estàndard de la OACI.
• Distància en un sistema ILS.
• Referència en sistemes inercials.
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
5
Prof. Xavier Estopà
DME
• Navegació 3D sintonitzant 3 estacions.
– Importància creixent en la RNAV.
– Ampliació del número d’estacions DME.
•
•
•
•
Precisió: +/- 1 NM (186 m).
Disponibilitat i fiabilitat: prop del 100%.
Cobertura: línia de vista.
Escalat continu.
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
6
Prof. Xavier Estopà
DME
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
7
Prof. Xavier Estopà
DME
• L’aeronau interroga amb un senyal polsat.
• Si la freqüència i la separació dels impulsos
són correctes, el responedor (transponder)
genera les respostes:
– Senyals polsats que es retornen a l’interrogador
per a que els processi al seu circuit de
seguiment.
• La distància es mesura tenint present el
temps total de viatge dels senyals,
d’interrogació i de resposta.
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
8
Prof. Xavier Estopà
DME
• El responedor ha de respondre a totes les
interrogacions.
• L’interrogador ha de identificar quins
impulsos corresponen a la resposta de la
seva interrogació.
• L’interrogador és qui determina la
distància.
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
9
Prof. Xavier Estopà
DME
• Tots els senyals tenen polarització vertical.
• El DME treballa a la banda de 962 a 1215
MHz ARNS (aeronautical radionavigation
service).
• Separació entre canals de 1 MHz.
• Hi ha canals tipus “X” i canals tipus “Y”.
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
10
Prof. Xavier Estopà
DME
• Fa referència a la separació de
freqüències del VOR.
• Canal-Y,
– desplaçat 50 kHz de les freqs. del canal X
– Separació entre impulsos de 36 µs.
• Normalment es fan servir els Canals-X.
– Separació de freqüències de 100 kHz.
– Separació entre impulsos de 12 µs.
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
11
Prof. Xavier Estopà
DME
• Precisió:
– és predictible. Errors a l’estació terrestre
menors que 0,1 NM.
– En total, menor al 3% de la distància.
– La major part dels errors provenen dels
instruments.
– Els errors són repetitius a curt termini.
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
12
Prof. Xavier Estopà
DME
• Disponibilitat:
– Es considera del 100%,
– amb indicació quan el sistema està fora de
tolerància.
• Fiabilitat:
– Components d’estat sòlid.
– RMMS (remote maintenance monitoring
systems).
– Propera al 100%.
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
13
Prof. Xavier Estopà
DME
• Capacitat del sistema:
– Al voltant de 100 interrogadors per estació.
– Depèn de la taxa d’interrogacions per
aeronau. Típicament 10 interrogacions per
segon.
• Integritat:
– Monitor de tolerància dels senyals. Deixa fora
de servei quan surt dels marges.
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
14
Prof. Xavier Estopà
DME
– Característiques del senyal:
• impulsos de durada 3,5 µs.
– Canal X:
• 960 MHz < fo < 1023 MHz
– Canal Y:
• 1151 MHz < fo < 1212 MHz.
– La separació entre parell d’impulsos depèn
del moment de funcionament.
• Cerca: 120 pps
• Seguiment: 25 pps
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
15
Prof. Xavier Estopà
DME
– Suposició:
• 95% en tracking (25 interrogacions per segon)
• 5 % en searching (150 interrogacions per segon)
• Per 100 aeronaus: 3000 parell d’impulsos / segon.
– El responedor manté la taxa de 3000 respostes
per segon.
• es manté a la seva sensibilitat màxima.
• cicle de treball del transmissor acotat.
• receptor d’aeronau rep nombre d’impulsos constant.
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
16
Prof. Xavier Estopà
DME
– El responedor:
• No transmet quan està en recepció.
• Per evitar el multi-camí, redueix la sensibilitat
després de cada interrogació vàlida.
– 20 % del temps perdut.
• Identificació durant 3 segons cada 37 segons.
– L’interrogador:
• No informa de pèrdua de senyal fins passats 10 s.
• Segueix interrogant
• presenta l’última mesura o bé prediu la posició.
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
17
Prof. Xavier Estopà
DME
– Monitor d’integritat.
• Situat en un punt fixe a l’entorn de l’estació DME.
• Desconnecta el responedor si durant 10 segons no
transmet correctament.
– Identificador DME
• MORSE a 1350 Hz
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
18
Prof. Xavier Estopà
16/09/2010
19
Prof. Xavier Estopà
16/09/2010
20
Prof. Xavier Estopà
16/09/2010
21
Prof. Xavier Estopà
16/09/2010
22
Prof. Xavier Estopà
Sistemes d’aterratge
Instrument Landing System
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
1
Prof. Xavier Estopà
Operacions en baixa visibilitat
• Cost de les alternatives.
• All weather conditions.
• Instrumental meteorological conditions (IMC).
– visibilitat reduïda en diversos graus.
• Decision height (DH) alçada a la que cal
suspendre la maniobra si no es veu la pista.
– Com millor sigui el sistema d’ajuda, menor serà
l’alçada de decisió (DH).
Curs 2010 - 2011
Sistemes de Navegació Aèria ETSEIAT - UPC
2
Prof. Xavier Estopà
Categories de visibilitat OACI.
• Amb assistència de sistema ILS.
• Categoria I. DH >200 ft. visibilitat > 2600 ft
– RVR (runway visual range) > 1800 ft amb
il·luminació de pista adequada.
– L’avió ha de diposar de receptor ILS i receptor de
balisses de marcació.
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
3
Prof. Xavier Estopà
Categories de visibilitat OACI. (2)
• Categoria II. DH >100 ft.
– RVR (runway visual range) > 1200 ft (350 m).
– L’avió ha de diposar de doble receptor ILS i radar
d’altimetria o bé receptor de balissa interior per
mesurar la DH.
– Guiat d’actitut per a l’aproximació frustrada.
– ...
Curs 2010 - 2011
Sistemes de Navegació Aèria ETSEIAT - UPC
4
Prof. Xavier Estopà
Categories de visibilitat OACI. (3)
• Categoria III.
– IIIA. DH < 100 ft i RVR > 700 ft (200 m)
• “See to land”
– IIIB. DH < 50 ft i RVR > 150 ft (50 m)
• “See to taxi”.
– IIIC. Zero visibility. Sense límits DH ni RVR.
– Per a qualsevol de les categories, han d’estar
certificats l’avió i la tripulació.
Curs 2010 - 2011
Sistemes de Navegació Aèria ETSEIAT - UPC
5
Prof. Xavier Estopà
Aspectes de visibilitat
• Desistir de l’aterratge a la DH es basa en la
visibilitat.
– En altre cas, s’ha de considerar fallada de
l’equipament.
• Alçada d’alerta (alert height) (100 ft) per sota
de la qual es pot continuar l’aterratge en cas
de fallada d’equipament.
• Ceilometers (sostre de núvols).
• Transmissometers (RVR).
Curs 2010 - 2011
Sistemes de Navegació Aèria ETSEIAT - UPC
6
Prof. Xavier Estopà
Il·lumianció en categoria III
Curs 2010 - 2011
Sistemes de Navegació Aèria ETSEIAT - UPC
7
Prof. Xavier Estopà
Aterratge visual / instrumental
• VFR (visual flying rules):
– sostre de núvols > 1000 ft
– visibilitat horitzontal > 3 NM
• IFR (instrument flying rules):
– no-precisió: guiatge lateral
– precisió: guiatge lateral i vertical.
• Ex. CAT I, CAT II i CAT III.
Curs 2010 - 2011
Sistemes de Navegació Aèria ETSEIAT - UPC
8
Prof. Xavier Estopà
Aproximació
• Cada aeroport tindrà els seus procediments
d’aproximació.
– Trajectòria d’aproximació: entre IAF i FAF (initial
and final approach fixes) seguint VOR/DME.
– Guiatge per feixos ràdio de ILS des de 1500 ft
d’alçada.
Curs 2010 - 2011
Sistemes de Navegació Aèria ETSEIAT - UPC
9
Prof. Xavier Estopà
Sistemes d’aterratge automàtic
• A partir de CAT II cal un sistema d’aterratge
automàtic.
• Sistema (BLEU: blind landing experimental
unit) britànic des de la IIGM.
• Evolució lenta:
– Primeres certificacions ILS CAT I als anys 40
– Primeres certificacions ILS CAT III als anys 60
– Primeres certificacions ILS CAT III als anys 70.
Curs 2010 - 2011
Sistemes de Navegació Aèria ETSEIAT - UPC
10
Prof. Xavier Estopà
Curs 2010 - 2011
Sistemes de Navegació Aèria ETSEIAT - UPC
11
Prof. Xavier Estopà
Instrument Landing System
• Antena del localitzador, centrada en pista.
• Glideslope (camí de descens).
• Balisses de marcació.
– Ona contínua, polarització horitzontal.
• Monitors de radiació.
• Opcionalment, sistema DME.
Curs 2010 - 2011
Sistemes de Navegació Aèria ETSEIAT - UPC
12
Prof. Xavier Estopà
Senyals de guiatge ILS
• Bandes de freqüència:
– Localitzador : 40 canals, de 108 a 112 MHz
– Glide slope: 40 canals de 329 a 335 MHz
– Balisses: freqüència única de 75 MHz.
– Freqüències agrupades: sintonia única.
Curs 2010 - 2011
Sistemes de Navegació Aèria ETSEIAT - UPC
13
Prof. Xavier Estopà
Senyals de guiatge ILS. LOCALITZADOR.
• Diagrama de radiació (DDR) genera senyal a
l’avió quan es desvia lateralment del pla
vertical que conté la línia central de la pista.
• Senyal CSB (carrier with sidebands).
– portadora modulada en AM a 90 Hz i 150 Hz
(senyals de navegació).
• Senyal SBO (sidebands only).
• Clearance signals (per resoldre reflexions en
obstacles).
Curs 2010 - 2011
Sistemes de Navegació Aèria ETSEIAT - UPC
14
Prof. Xavier Estopà
Senyals de guiatge ILS. LOCALITZADOR.
Curs 2010 - 2011
Sistemes de Navegació Aèria ETSEIAT - UPC
15
Prof. Xavier Estopà
Senyals de guiatge ILS. LOCALITZADOR.
• A la dreta de l’eix de pista, predomina la
modulació de 150 Hz.
• A l’esquerra de l’eix de pista, predomina la
modulació de 90 Hz.
Curs 2010 - 2011
Sistemes de Navegació Aèria ETSEIAT - UPC
16
Prof. Xavier Estopà
Senyals de guiatge ILS. LOCALITZADOR.
Curs 2010 - 2011
Sistemes de Navegació Aèria ETSEIAT - UPC
17
Prof. Xavier Estopà
Senyals de guiatge ILS. LOCALITZADOR.
• DDM (diferència en la profunditat de
modulació).
• Cal ajustar el CDI (cross-pointer course
deviation) per representar les DDM
mesurades.
Curs 2010 - 2011
Sistemes de Navegació Aèria ETSEIAT - UPC
18
Senyals de guiatge ILS.
CAMÍ de DESCENS.
Prof. Xavier Estopà
• Mateixos senyals que el localitzador.
• Correcció de 3º en elevació per a determinar
el pendent.
• Per sobre dels 3º predomina la modulació de
90 Hz.
• Per sota del pendent de 3º predomina la
modulació de 150 Hz.
Curs 2010 - 2011
Sistemes de Navegació Aèria ETSEIAT - UPC
19
Prof. Xavier Estopà
Senyals de guiatge ILS. LOCALITZADOR.
Curs 2010 - 2011
Sistemes de Navegació Aèria ETSEIAT - UPC
20
Senyals de guiatge ILS.
CAMÍ de DESCENS.
Curs 2010 - 2011
Sistemes de Navegació Aèria ETSEIAT - UPC
Prof. Xavier Estopà
21
Senyals de guiatge ILS.
CAMÍ de DESCENS.
Curs 2010 - 2011
Sistemes de Navegació Aèria ETSEIAT - UPC
Prof. Xavier Estopà
22
Senyals de guiatge ILS.
Esquema d’un receptor.
Curs 2010 - 2011
Sistemes de Navegació Aèria ETSEIAT - UPC
Prof. Xavier Estopà
23
Prof. Xavier Estopà
Balisses de marcació
• Informació puntual de la distància al punt de
contacte. Outer, Middle, Inner.
• Outer: de 4 a 7 NM del llindar de pista (AM
400 Hz, -- morse /s)
• Middle: 3000 ft del llindar (AM 1300 Hz, -. /s).
• Inner: 1000 ft abans del llindar (AM 3000 Hz,
...... /s).
Curs 2010 - 2011
Sistemes de Navegació Aèria ETSEIAT - UPC
24
Prof. Xavier Estopà
Balisses de marcació
Curs 2010 - 2011
Sistemes de Navegació Aèria ETSEIAT - UPC
25
Prof. Xavier Estopà
Balisses de marcació
Curs 2010 - 2011
Sistemes de Navegació Aèria ETSEIAT - UPC
26
Prof. Xavier Estopà
Sistemes d’aterratge
Microwave Landing System
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
27
Prof. Xavier Estopà
MLS
Curs 2010 - 2011
Sistemes de Navegació Aèria ETSEIAT - UPC
28
Prof. Xavier Estopà
MLS
Curs 2010 - 2011
Sistemes de Navegació Aèria ETSEIAT - UPC
29
Prof. Xavier Estopà
MLS
• Supera les prestacions del ILS.
• Gran disponibilitat de canals (a 5 GHz).
• Adoptat al 1985 per la OACI.
• Combinació amb DME/P. (precisió < 100ft).
– Compatible amb el convencional.
• Versió mòbil:MMLS.
Curs 2010 - 2011
Sistemes de Navegació Aèria ETSEIAT - UPC
30
Prof. Xavier Estopà
Subsistema de Navegació
Sistemes de posicionament
hiperbòlics.
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
1
Prof. Xavier Estopà
Referències web
•
•
•
•
http://www.loran.org
http://www.insidegnss.com/node/1806
http://en.wikipedia.org/wiki/LORAN
http://en.wikipedia.org/wiki/OMEGA_Navigati
on_System
• http://www.jproc.ca/hyperbolic/omega.html
• http://www.vlf.it/alphatrond/alpha.htm
• http://www.jproc.ca/hyperbolic/decca_oview.h
tml
2
Prof. Xavier Estopà
3
Prof. Xavier Estopà
4
Prof. Xavier Estopà
16/09/2010
5
Prof. Xavier Estopà
Sistemes de navegació hiperbòlics
•
•
•
•
•
•
LORAN (A,D), LORAN C, eLORAN.
OMEGA.
DECCA.
ALPHA.
CHAYKA
...
6
Prof. Xavier Estopà
Característiques generals
•
•
•
•
Sistemes basats en estacions terrestres.
Gran abast
Freqüències baixes.
Cadenes d’estacions de referència.
7
Prof. Xavier Estopà
Models de propagació
8
Prof. Xavier Estopà
Loran C
•
•
•
•
•
•
Ones terrestres
Freqüència entre 90 i 110 kHz
Abast més enllà de 1000 NM
Anàlisi de diferències de temps d’arribada
Tècnica polsada
Mesura de fase per a més precisió
9
Prof. Xavier Estopà
Loran C
• Cadenes d’estacions terrestres de
referència
– Com a mínim 3 transmissors
•
•
•
•
Estació MASTER
Estacions SECUNDÀRIES
Abast: potència i geometria
Impuls de característiques definides
10
Prof. Xavier Estopà
Loran C
11
Prof. Xavier Estopà
Loran C
• Cada estació transmet sèries d’impulsos
– GRI (group repetition interval)
– Pulse group
• El GRI identifica la cadena d’estacions
• Les transmissions de les estacions no se
superposen dins de l’àrea de cobertura
– Transmeten per torns
12
Prof. Xavier Estopà
Loran C
• Format del senyal:
– número d’impulsos en el grup
– separació d’impulsos en el grup
– fase de la portadora en cada impuls
– temps de transmissió
– temps entre repetició de grups d’impulsos
– retard dels grups d’impulsos de les estacions
secundàries respecte als de la màster.
13
Prof. Xavier Estopà
Loran C
• Una estació pot pertànyer a més d’una
cadena
• GDOP: Geometric Dilution of Precision
• La precisió pot arribar fins als 18 metres
• Té informació d’integritat
– alterant la seqüència d’impulsos
14
Prof. Xavier Estopà
Loran C
15
Prof. Xavier Estopà
Loran C
16
Prof. Xavier Estopà
Loran C. GDOP.
17
Prof. Xavier Estopà
Omega
• Transmeten ones contínues, no impulsos
• Abast: 5000 a 15000 NM
• Precisió: fins a 500 metres, en mode
diferencial
• Hi ha 8 estacions Omega, que donen
cobertura global
16/09/2010
18
Prof. Xavier Estopà
Omega
16/09/2010
19
Prof. Xavier Estopà
Omega
• Multiplexació temps / freqüència:
– Es transmeten 4 senyals de frqüència comú a
totes les estacions: 10.2, 11.33, 13.6 i 11.05 kHz
– Cada estació transmet un senyal propi (únic)
– 8 transmissions separades 0,2 segons
– Períodes de transmissió de durada variable
20
Prof. Xavier Estopà
21
Prof. Xavier Estopà
Subsistema de Navegació
Sistemes de navegació inercials
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
22
Prof. Xavier Estopà
Sistemes de navegació inercial
• Avantatges:
– Les indicacions de posició i velocitat són
instantànies i contínues.
– És un sistema autocontingut, no radiant i no
interferible des de l’exterior del vehicle.
– Permet obtenir informació de navegació en
qualsevol lloc, en totes les condicions
metereològiques i sense estacions de referència
terrestres.
– Dóna informació de posició, velocitat, roll, yaw i
pitch en un vehicle en moviment.
23
Prof. Xavier Estopà
Sistemes de navegació inercial
• Inconvenients:
– La posició i la velocitat es degraden amb el
temps.
– L’equipament és car (NO AVUI EN DIA).
– Cal una alineació inicial (difícil en vehicles en
moviment o per sobre dels 75º N/S).
– La precisió de la informació de navegació
depèn de les maniobres que efectuï el
vehicle.
24
Prof. Xavier Estopà
Plataforma inercial
25
Prof. Xavier Estopà
Subsistema de Navegació
Sistemes de navegació per
satèl·lit
Curs 2010 - 2011
Sistemes de Navegació Aèria
ETSEIAT - UPC
26
Prof. Xavier Estopà
Sistemes de navegació per satèl·lit
• GNSS
– GPS
• EGNOS
• WAAM
– Glonass
– Galileo
• Altres sistemes no globals
27
l.
VOR y VOR-Doppler
La§ ayudas a la navegaci6n por radio VOR y VOR-Doppler son los elementos componentes esenciales de los sis­
temas internacionales de control de tráfico aéreo que se utilizan en la actualidad. Las versiones VOR-S y DVOR-S
pertenecen a una nueva generación de equipos de construcción modular que utilizan tecnología de estado sólido.
G. HOFGEN
Standard Elektrik Lorenz AG, Stuttgart, República Federal de Alemania
Introducción
Tabla de
.
El radiofaro omnidireccional de VHF, VOR, se ha .
adoptado internacionalmente como sistema de ayuda a
la navegaci6n por radio para la navegación aérea. Co­
mo información azimutal, proporciona el ángulo entre
la aeronave y el norte magnético, según se observa
desde la ubicación de la estación terrestre~ El piloto
guía la aeronave de estaci6n en estación de acuerdo
con el rumbo seleccionado con la ayuda de una indi­
cación azimutal constante. Para conseguir esto, el rum­
bo que se va a seguir se ajusta mediante el selector de
rumbo del equipo de a bordo. En un instrumento se
representan las desviaciones de esta r·u ta deseada.
El VOR es un sistema de ayuda a la navegación de
bajo coste y de precisión adecuada, que incluso hoy día
es capaz de proporcionar un servicio satisfactorio con
tal de que las condiciones de propagación sean buenas.
El sistema VOR-Doppler proporciona un método me­
jorado para las medidas azimutales. Las señales radia­
das por los dos sistemas son compatibles, de forma que
los receptores a borc.o pueden trabajar de la misma
manera con esta.ciones terrestres tanto VOR como
VOR Doppler.
La estación terrestre VOR Doppler, aunque carac­
terizada por una mayor inversi6n en equipo, ofrece
un¡l ventaja decisiva sobre el VOR convencional en el
sentido de que permite una notable reducción del error
azimutal en caso de condiciones de propagación ad­
versas.
Los alcances de los sistemas VOR y VOR Doppler
están limitados por las condiciones de propagación de
trayecto visual de las ondas de VHF. Para alturas de
vuelo elevadas, se consiguen alcances de hasta 300 km.
VOR
. Principio de funcionamiento
El sistema VOR funciona con una frecuencia por­
tadora situada en la banda de 10& MHz a 118 MHz y
radia una señal variable juntamente con una señal de
referencia. La diferencia de fase entre estas dos seña­
les se corresponde con el azimut y se evalúa en el recep­
tor de la aeronave. Las líneas de azimut constante son
radiales.
La fase variable es una señal de 3Q Hz que se ob­
tiene haciendo girar un diagrama de radiación direc­
cional en forma de ocho de VHF (por ejemplo de un
dipolo) a.la velocidad de 30 revoluciones por segundo.
Este diagrama direccional se superpone en el espacio a
la portadora radiada omnidireccionalmente y de esta
manera se produce en el receptor una señal modulada
Comunicaciones Eléctricas' N° 50/4 . 1975
abr~viaturas
,
DVOR - Medidor omnidireccional de rumbo en VHF
por efecto Doppler
ICAO - Organizaci6n Internacional de la Aviaci6n Civil
.
VHF - Muy aJta frecuencia
VOR - Radiofaro omnidireccional de VHF
VOR-S - Medidor omnidireccÍonal de rumbo en VHF de
estado sólido
en amplitud a 30 Hz, con una fase que depende del
azimut.
.
La señal de referencia ·es también una onda de 30 Hz
que, sin embargo, está contenida como modulación de
frecuencia en una subpomidora de 9960 Hz con un
desplazamiento de frecuencia de ± 480 Hz. La fre­
cuencia pqrtadora antes indicada está modulada en
amplitud por ·la señal subportadora de 9960 Hz. De
esta manera, se consigue un desacoplamiento satisfac­
torio entre la señal variable y la señal de referencia
que son de la misma frecuencia. Además de llevar la
señal de referencia, la portadora se modula en ampli­
tud con la voz (300 a 3000 Hz) Y la señal de identidad
(1020 Hz).
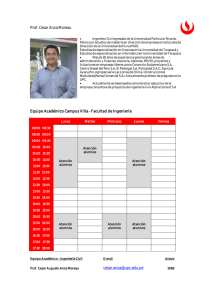
Diseño
La instalación VOR-S de SEL es una estación terres­
tre VOR de construcci6n modular [1]. Las diferentes
unidades funcionales del sistema se han ~ealizado en
forma de unidades enchufables y módulos. La ventaja
de esta construcción radica en la conservaci6n sencilla
y rápida. En caso de fallo, la unidad defect\.IOsa puede
.
sustituirse inmediatamente. .
Otra característica importante del VOR-S es la ex­
tensiva utilización de elementoS de estado sólido. 1n­
cluso la señal variable se genera en un gonióinetro elec­
trónico para eliminar el giro mecánico. Mediante la
adecuada aplicación de la !ecnología de estado sólido
se ha conseguido un alto grado de fiabilidad.
En la figura 1 se muestra el diagrama de bloques de
la estaci6n terrestre VOR-S. El transmisor consta de
excitador, transmisor de portadora y goniómetro elec­
trónico. El modulador suministra el voltaje de modu­
lación para modular en amplitud el transmisir de por­
tadora.
·
.
Las señales de conversación, identidad y la subpor­
tadora de 9960 Hz, que está modulada en frecuencia
por la señal de referencia de 30 Hz, estan superpues­
tas. El conmutador principal de la instalación se go­
bierna mediante un sistema lógico de control, que
inicia el corte o la conmutación en el caso de alarma
del transmisor o del monitor. Las operaciones manuales
269
VOR y VOR-Doppler
RAO IAOOR
Ol.lNIOIRECCIONAl
OETE CTOR
Uf ClllPÚ
OIPOlOS ' - / - - - - - -_
CRUZAOOS
-~­
VOLTAJE
YOOUllOOR
VOZ (300 __ 3000 Hl)
{
IOEHlIoIo 1020 H.)
sEflAl DE JmREHCIA (9960 H.)
duladores electr6nicos con alta estabilidad y lineali­
-dad. En el goniómetro electrónico del VOR-S [3] el pro­
ceso de modulaci6n está separado déL de la generación
de la potencia de salida. De esta manera, la modula­
ci6n puede realizarse a bajo nivel con alta estabilidad
y linealidad.
_
_
El goniómetro álimenta a los diplos cruzados del
dispositivo de antena especial construído con técnica
de circuito impreso. En una placa comÚn de material
aislante se sitúa, además de los dipolos cruzados, el ra­
diador omnidireccional que es una antena de bucle de
cuatro entradas. Para la compensaci6n de las compo­
nentes de radiaci6n polarizadas verticalmente de los
dipolos cruzados se sitÚa, debajo de la cubierta de
plástico, una jaula de polariZación formada por vari­
llas verticales. Otra versi6n del sistema de antena, con­
siste en dos placas de radiadores, con jaula de polari­
zaci6n, apiladas verticalmente una sobre la otra. Esta
antena de dos elementos proporciona una intensidad de
campo que es 5 dB superior para ángulos de elevaci6n
pequeños lo que resulta en un aUmento de alcance.
VOR Doppler
Principio de funcionamiento
220 y_C A.
Fig. 1 Diagrama de- bloques de una estación terrestre VOR-S
(Instalación sencilla).
o de control remoto de apagado, encendidó y conmu­
taci6n se realizan a través del sistema 16gico de control
que tainbi~n lleva a cabo los enclavamientos mútuos
previstos en -el caso de instalación es duales.
_
El sistema monitor VOR-S asegura que la señal
VOR compuesta radiada cumple con las recomenda­
ciones de la ICAO [2] y que en el caso de producirse
un fallo se origina una alarma que -activa el corte o
cambio automático del sistema. Un detector de campo,
instalado en el campo de radiaci6n, capta la señal ra­
diada, la demodula y la lleva a la unidad morutora de
la instalaci6n.
El equipo transmisor de VOR-S se aloja en una ca­
seta cuyo temo sirve, simultáneamente, de contrantena
y de SOporte para el conjunto de antenas. La figura 2
muestra una instalaci6n con una antena formada por
un solo elemento contenida en la cubierta cilíndrica de
plástico. En primer plano y a la izquierda puede verse
el detector de campo.
En el sistema VOR Doppler, las funciones de las ­
dos señales de 30 Hz están intercambiadas en compa­
raci6n a las del VOR normal. Esto significa que la se­
ñal de 30 Hz qu~ modula en amplitud a la portadora ­
de VHF es la señal de referenc'ia y que la señal varia­
ble de 30 Hz está contenida. como modulaci6n de fre­
cuencia en la subportadora de 9960 Hz. El método
consiste básicamente en lo siguiente:
­
La antena de la estación radia la señal portadora
omnidireccional que está modulada en amplitud por la
señal de referencia de 30 Hz. A la distancia R de esta
antena portadora se encuentra un radiador de banda
\,
Características particulares del VOR-S
El VOR-S incorpora un número.dé características
particulares que son de interés, tanto desde el punto de
vista -técnico como del de funcionamiento P, 4J. Estas
comprenden, en primer lugar, la manera de generar la
señal variable mediante un goniómetro electrónico jun­
tamente -con dos dipolos cruzados de un dispositivo de
antena especial.
La modulación en un gonió~etro electrónico pre­
senta algunos problemas, ya que deben utilizarse mo­
270
Fig. 2 Estación terrestre de VOR-S con antena de un solo
elemento (Nieuwkoop, Netherlands).
Comunicaciones Eléctricas' N° 50/4' 1975
VOK y VOR-Doppler
lateral que puede imaginarse girando en una trayec­
toria circular. La frecuencia de la señal de banda lateral
está desplazada + 996Q Hz y - 996Q Hz con. respecto
a la frecuencia portadora. Con el radiador de banda
lateral girando a una velocidad de 30 revoluciones por
segundo se obtiene una. modulación de frecuencia de­
pendiente del azimut de la subportadora debido al
efecto Doppler. Para el desplazamiento de. frecuencia
de ± 480 Hz especificado por la ICAO [2] se obtiene
un círculo de radio R entre 7,1 Y 6,5 ro. que corres­
ponde a la banda de frecuencias de 108 a 11 g. MHz.
Puesto que la rotación no puede realizarse por me­
dios mecánicos, deberá ser simulada. Para conseguir
esto, se disponen en círculo un número de antenas. sen­
cillas esta.cionarias que se alimentan secuencialmente
con energía de banda lateral de RF de tal manera que
el centro de radiación se mueve alrededor del círculO a
la velocidad prescrita.
Aunque la descripción anterior se refiere sólo a la
rotación de una banda lateral única, la extensión al
método de doble banda lateral puede realizarse de for­
ma sencilla. En este caso, las dos bandas laterales cuyos
centros de radiación se mueven en la misma dirección,
son radiadas por puntos opuestos del círculo de an­
tenas.
Diseño
La instalación DVOR-S de SELes una estación te­
rrestre VOR Doppler que es también de construcción
modular y diseñada: en tecnología de estado sólido co­
mo el VOR-S, de manera que 'no necesita más explica­
ciones. Desde luego, muchas unidades enchufables son
idénticas para los dos sistemas, lo que supone una no­
table ventaja para conservación y almacenamiento de
las unidades de repuesto.
El equipo transmisor DVOR-S se aloja, juntamente
con el comnutador electrónico de antena en una caseta
por debajo de la contrantena del conjunto de antenas.
El plano de la COntrantena tiene un diámetro compren­
dido entre 30 y 40 m y una altura sobre el s).lelo entre
3 y 10 m. Este plano comprende las 39 antenas de banda
lateral y la antena portadora en el centro. La figura 3
muestra esta disposición de las antenas.
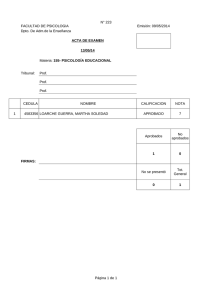
En la figura 4 se muestra el diagrama de bloques de
la instalación DVOR-S. El transmisor de banda late­
ral produce las señales de banda lateral que están des­
plazadas ± 9960 Hz con respecto a la frecuencia por­
tadora y moduladas en amplitud al ritmo de la fre­
cuencia de. conmutación, con una profundidad de mo­
dulación de cerca del 100 "lo. Las curvas envolventes
están desplazadas una respecto de la otra, por un semi­
período. La unidad de conmutación de antena controla
la conmutación secuencial de las antenas que se con­
mutan en el mínimo de voltaje. Al mismo tiempo, la
otra banda lateral de las antenas aproximadamente
opuestas tiene su voltaje máximo.
Fig. 3
Conjunto de antenas de la estación terrestre· VOR Doppler en Salzburgo. en frecuencia que contiene la fase variable [4]. Se uti­
. liza un método de doble banda lateral modificado conocido como método de banda lateral alternativo. Se obtiene a partir del método de doble banda lateral omitiendo una si y otra no las antenas de banda line:-' ral, en el supuesto de que el número resultante de an­
tenas de banda lateral sea impar. Se ha demostrado que la rotación simulada de la radiación de la banda lateral es idéntica a la del método de doble banda late­
ral aunque la transición de radiación no va de una an-
DIPOLO
OE
CAI.IPO/
--/
rRAH~~ISOR
¡......-t-----'
BAl<DA
LATERAL
VOLTAJE
MOOUlAOOR
OZ (SOO ... 3000HZl
IOE~1I0AO
{
SE~IJ.
(10'0 Hz)
DE REFERENCIA (30 H.)
Características particulares del DVOR-S
Una característica particular del sistema DVOR-S
es el tipo de generación de la subportadora modulada
Comunicaciones Eléctricas' N° 50/4 . 1975
220
·Fig. 4
v. e A.
Diagrama de bloques de una estación terrestre DVOR-S.
271
VOR y VOR-Doppler
tena a la antena adyacente, sino a una antena que está
en la posición aproximadamente opuesta en el círculo
y que escl radiando la otra banda lateral.
El método de banda lateral alternativa que ha sido
realizado por -vez primera por SEL,se ha introducido
a nivel internacional con l'esultadosexcelentes. Scob­
tiene un desacoplamiento satisfacroriodebido a que las
antenas que :están radiando simultáneamente se encuen­
tran siem,pre en posición opuesta y no adyacente. Otra
ventaja es la relativamente pequeña inversión en
eqUipo.
Fig, 5
Indicaci6n de rumbo del VOR y VOR Doppler en la
misma ruta. (Estaci6n terrestre en Salzburgo).
Precisión del sistema
Las fuentes de errores de) método VOR son las in­
herentes a la estaciÓn 'terrestre, terreno circundante y a
los errores del receptor de a bordo y del piloto. Los
errores propios de la estación terrestre VOR-S son re­
lativamente pequeños (aproximadamente 1°). En el
VOR el error debido a las condiciones del terreno es el
factor más significativo. Se produce por reflexiones en
los obstáculos situados en el camino de propagación de
la radiación. Además de la información azimutal co­
rrecta, también aparece en el receptor una información
que contiene el azimut del obstáculo reflector. Por adi­
ción vectorial se produce el error, cuya magnitud de­
pende de la intensidad ,de la radiación reflejada, de la
diferencia de fase de RF entre la señal directa y la re­
flejada y de la diferencia entre el azimut del receptor
y del reflector.
En caso de condiciones de propagación adversas, el
VOR Doppler consigue una ventaja decisiva sobre el
VOR debido a la amplia base de antena y a la modu­
lación de frecuencia de la señal variable.
La figura 5 muestra, por vía de ejemplo, la dife­
rencia en la indicación del rumbo entre el VOR y el
VOR Doppler en la misma ruta (estación terrestre en
Salzburgo).
272
Referencias
[1) H. Popp: VOR de estado sólido - Una nueva generación de
ayuda ' a la navegación omnidireceional; Comunicaciones Eléc­
tricas, Vol. 44 (1969), N° 4, págs. 312-321.
[2) ICAO. Aeronautical Telecommunications, Anexo 10, Vol. 1
(julio 1972),
[3) G. HOfgen: Ein elektronisches Goniometer (Un goniómetro
electrónico); Frequenz 22 (1968), N° 2, págs. 32-34.
[4] E, Kramar: Funksysteme für Orrung und Navigation und
ihre Anw.endung in der Verkehrssicherung (Sistema de radio
para localizaci6n y navegaci6n y sus aplicaciones al control
de tráfico); Verlag Berliner Union GmbH, Stuttgarr (1973),
págs. 131-146.
[5) M. Kayron, R. R. Fried: Avionics Navigarion System; John
Wiley & Sons, Nueva York (1969).
[6) W. J. Crone, H. Popp: El VOR Doppler de SEL; Comuni­
caciones Eléctricas, Vol. 43 (1968), N° 2, págs. 152-158.
Günter Hofgen nació en 1935 en Ohorn, Alemania. Se gra­
duó en ingenieda eléctrica en la Universidad Técnica de Berlln.
Recibió el gl'ado de ingeniero diplQffiado en 1959 y el de doc­
tor ingeniero en 1964.
En 1959 . ingres6 en Standard Elekrrik Lorenz AG, Durante
los años siguientes estuvo dedicado a la investigación y des­
arrollo de equipos y sistemas de radionavegación, Desde 1973
encabeza un departamento staH de consultores cientÍficos y de
sistemas.
En 1974 recibió el premio Wolfgang-Martini de la Sociedad
alemana de Navega<:ión y Localizaci6n.
Comunicaciones Eléctricas' N° 50/4 . 1975