Lógica difusa
Anuncio

Lógica difusa
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
Semestre
2010/2
2009/2 2010/2
Bibliografía básica (módulo sistemas Difusos)
• “Neuro-Fuzzy and soft computing”, J.S. Roger Jang, C. Tsai Sun, Eiji
Mizutami, Prentice Hall, 1997.
• “Learning and soft computing: support vector machines, neural
networks, and fuzzy logic models” Vojislav Kecman. MIT Press, 2001.
• “Fuzzy systems for Engineering: a tutorial”,J. Mendel, Procedding of
IEEE Vol. 83, No. 3, March 1995.
• “Fuzzy Logic, Identification and predictive Control”, Jairo Espinosa,
Joos Vandewalle and Vencent Wert, Springer 2004.
• Proceeding of IEEE, IEEE trans. On Fuzzy Systems, Fuzzy sets and
Systems, IEEE Trans. Systems, Man and Cybernectics
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
Introducción
Un sistema inteligente” sería aquel que posee una habilidad
parecida al ser humano para resolver problemas dentro de un
dominio específico, tiene capacidad para adaptarse, aprender
en un ambiente cambiante y explicar como se toman las
decisiones (o acciones)”.
"Los Sistemas Inteligentes basados en redes neuronales,
máquinas de soporte vectorial (SVM) y lógica difusa se están
consolidando como herramientas fundamentales para modelar
sistemas complejos no lineales”
"Los conjuntos difusos y la lógica difusa, que son el
fundamento de los sistemas difusos, han sido desarrollados
buscando modelar la forma como el cerebro manipula
información inexacta e imprecisa”
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
Introducción
“Un sistema inteligente” sería aquel que posee una habilidad
parecida al ser humano para resolver problemas dentro de un
dominio específico, tiene capacidad para adaptarse, aprender en
un ambiente cambiante y explicar como se toman las decisiones ( o
acciones).
En el último siglo ha existido un interés creciente por la
construcción de máquinas inteligentes.
1947, Se definió la Cibernética ( Norbert Wiener) “un estudio
unificado del control y de la comunicación en los animales y las
máquinas”.
La época de la cibernética coincide con el desarrollo de varios
paradigmas:
Evolución de los computadores analógicos a digitales.
Teoría formal de la computación ( Alan Turing).
Computadora basada en lógica digital: John Von Neumann
Primeros modelos del neuron: McCulloch-Pitts (1943),
perceptron (1957) La inteligencia artificial (IA), 1960, John
McCarthy
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
Introducción
Inteligencia Artificial:
“Buscaban definir los métodos algorítmicos capaces de hacer
pensar a los computadores !!”
Hubo una gran efervescencia en la década del 60, debido
a los resultados iniciales se pensaba que se “conseguiría
construir máquinas realmente inteligentes”.
Hubo un declive de las otras áreas: la cibernética y la redes
neuronales.
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
Introducción
1969, Marvin Minsky, mostró mediante un estudio riguroso,
formal, limitaciones en los perceptrones para resolver algunos
problemas. Esto causó una perdida de confianza en el área de
redes neuronales.
La Inteligencia Artificial:
El ser humano utiliza el lenguaje como medio para razonar y
sacar conclusiones.
La IA busca imitar el comportamiento inteligente, tratando de
expresarlo en formas de lenguaje o reglas Simbólicas”
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
Introducción
La Inteligencia Artificial:
“La IA manipula simbolos basandose en la suposición que el
comportamiento inteligente puede ser almacenado en bases de
conocimiento estructuradas simbólicamente”.
El mayor desarrollo de la IA son los sistemas expertos o
Sistemas basados en conocimiento:
“Son complejos programas (software) en los que se codifica
el conocimiento de expertos en una materia muy concreta
enforma de reglas de decisión”.
- La IA se sustenta en el binomio: lógica boolena-máquina de Von
Neumann.
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
Introducción
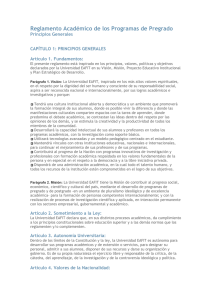
Pregunta
Respuesta
Usuario
(Novato)
Interface de Usuario
Máquina de
Inferencia
Facilidad de
Explicación
Base de Datos
Global
KB
Ingeniero de
Conocimiento
Adquisición de
Conocimiento
Humano
Experto
Hechos
Reglas
Computador
Host
etc...
Estructura de un sistema experto
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
Introducción
Inteligencia computacional:
La inteligencia computacional (soft computing) tiene
Objetivos similares a la IA, pero ha puesto más énfasis
en metodologías inspiradas biológicamente: modelado de
Cerebro, algoritmos evolutivos, lógica difusa).
Softcomputing cubre algunos paradigmas recientes:
- Lógica difusa y sistemas basados en razonamiento difuso.
- Redes neuronales.
- Máquinas de Soporte Vectorial- SVMs.
- Técnicas de optimización basadas en algoritmos genéticos.
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
Algoritmos Géneticos
"Los algoritmos genéticos han sido desarrollados con base en la teoría de la evolución y se usan eficientemente para resolver problemas de optimización".”
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
REDES NEURONALES
"Las redes neuronales artificiales son modeladas a partir de la
observación de la estructura (física) del cerebro".
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
Lógica Difusa
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
Sistemas Difusos Vs Redes Neuronales
Los sistemas difusos:
Han sido desarrolladas buscando modelar la forma como el cerebro
manipula información imprecisa.
La redes neuronales:
Son modeladas a partir de la arquitectura física del cerebro.
(interconexión de neuronas conforman una red Neuronal)
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
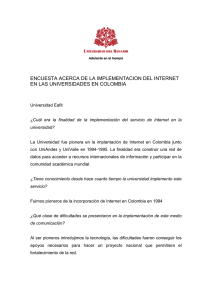
Sistemas Difusos Vs Redes Neuronales
Modelos basados en RN y
MSV
Modelos basados en LD
Caja negra
Caja blanca
No se tiene conocimiento
previo, pero se tienen
medidas (datos),
observaciones, records
Se dispone de un
Conocimiento estructurado
(experiencia, experticia,
o heurísticas ). Se expresa
generalmente en reglas
R1: Si la Velocidad es
alta y distancia es
pequeña
entonces la fuerza en el
freno debería ser
grande.
R2: Si……
Se establece el concepto de
aprendizaje a partir de los datos
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
Sistemas Difusos Vs Redes Neuronales
En algunos casos se puede disponer de ambos: conocimiento previo y
algunos datos
Caja gris
En esta situación se usan ambos: modelos neuro difusos
o modelos fuzzy-neuro
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
SISTEMAS DIFUSOS
Los sistemas difusos y las redes neuronales:
• Estimadores libres de modelos.
• Sistemas dinámicos.
• Ambos tienen la capacidad de modelar procesos no lineales
complejos con un grado arbitrario de exactitud.
• Son tecnologías complementarias:
- Sistemas difusos con habilidades de aprendizaje.
- Redes neuronales con una estructura determinada
por la forma y el proceso de razonamiento propio
de las reglas difusas “If-then”.
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
Sistemas Difusos
Los sistemas difusos pueden usarse en muchos
campos de la ingeniería:
- Control de procesos.
- Modelado no lineal.
- procesamiento de imágenes.
- Comunicaciones.
- Problemas de optimización.
- Sistemas para toma de decisiones.
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
SISTEMAS DIFUSOS
La expresión del conocimiento
Cuando se trabaja con la solución de problemas existen dos
tipos de conocimiento:
Conocimiento objetivo: El cual se expresa en forma de
modelos matemáticos. Estos modelos son usados
corrientemente en la solución de problemas en el campo
de la ingeniería.
Conocimiento subjetivo: el cual es representado en forma
lingüística que es imposible de cualificar con modelos
matemáticos tradicionales.
Ej: “Si el valor de la ganancia es muy alto entonces el
sistema puede ser inestable”
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
CONJUNTOS DIFUSOS
Qué es un conjunto de acuerdo con la teoría clásica?
Es una reunión de elementos que cumplen alguna condición preestablecida.
Notación: A = { x / x cumple alguna condición}
Ejemplo: A = { x R / x > 5 }
B
Conjuntos discretos se pueden
representar con diagramas. Por
ejemplo el conjunto B (de números
enteros entre 1 y 5):
1
2
3
4
5
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
Así:
1 B
2 B
3 B
4 B
5 B
2010/2
2009/2
CONJUNTOS DIFUSOS
La función característica o de pertenencia
Se puede definir un conjunto estableciendo su función de pertenencia (
también llamada función característica).
La función asume la siguiente forma para conjuntos clásicos:
Sea el conjunto A, la función de pertenencia μA(x) será:
1, si x A
μA(x) =
0, a x A.
Ejercicio:
Considere el conjunto de todos los estudiantes del curso como conjunto
universal. Considere C, como el conjunto de los estudiantes con
promedio mayor a 4. Evalúe μC(x) para algunos valores de x.
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
CONJUNTOS DIFUSOS
Ejemplo: sea el conjunto A:
A ={ El conjunto de los números reales mayores que 5}
o equivalentemente:
A = { x R / x ≥ 5}
Entonces: μA(4) = 0
μA(6) = 1
Gráfica de μA(x)
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
μA
1
3 4 5 6 7 ….
UNIVERSIDAD EAFIT
R
2010/2
2009/2
CONJUNTOS DIFUSOS
Conjuntos difusos
La pertenencia de los elementos al conjunto puede ser gradual, lo
cual se expresa mediante la función de pertenencia, que en este
caso puede tomar valores dentro del intervalo [0,1]
Ejemplo:
Sea el conjunto universal X ={ 1, 2, 3, 4, 5, 6, 7, 8, 9}. Sea el
conjunto A = {el número apropiado de cursos que un estudiante
debe tomar en el primer semestre de Ingeniería Física}
A, lo podríamos definir considerando sus elementos junto con sus
valores de pertenencia:
A ={ (1, 0.1), (2,0.3), (3,0.4), (4,0.6), (5,1), (6,0.9), (7,0.6), (8,0.3)
(9, 0.1) }
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
CONJUNTOS DIFUSOS
Conjunto clásico
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
Conjunto Difuso
UNIVERSIDAD EAFIT
2010/2
2009/2
Conjuntos clásicos Vs Conjuntos difusos
•
En los conjuntos difusos la pertenencia de un elemento a un conjunto no es tan drástica. El elemento puede tener un grado de membrecía a dicho conjunto
•
Los conjuntos clásicos se pueden representar de 3 formas
1) Nombrando los elementos del conjunto
Ej: A={a,e,i,o,u}
2) Definiendo una expresión que los miembros cumplan
Ej: A={x| x es una letra vocal}
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
3) Definido por una función característica
Esta función mapea los elementos del
conjunto universo a los elementos del conjunto
{0,1}.
Para cada
entonces x es miembro de
A
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
• En los conjuntos difusos la función característica mapea los elementos al intervalo real [0,1]
• Formalmente
Sea X conjunto universo clásico tal que x sean sus elementos, esto es . Un conjunto difuso A lo definimos mediante
A = { ( x, A (x) ) | x X }
Donde A(x): Función de membresía
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
Ejemplos: A: Conjunto de los hombres jóvenes
B: Conjunto de los hombres de edad media
C: Conjuntos de los hombres viejos
• Cada uno de los conjuntos no posee límites claros y se pueden representar mediante conjuntos difusos.
• Los conjuntos difusos son una forma de representar imprecisión e incertidumbre ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
Las funciones de pertenencia podrían ser:
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
Tipos de funciones de membresía
• En general se puede utilizar cualquier función continua que mapee los de un conjunto universo clásico dado a elementos al intervalo [0,1], las más comunes son:
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
Sigmoide
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
Diferencia entre 2 sigmoides
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
Función Gaussiana
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
Curvas basadas en Splines
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
Función triangular
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
Operaciones básicas sobre conjuntos difusos
• Las operaciones básicas en los conjuntos clásicos son 3
Unión
Ej: A={a,e,i,o,u}
B={b,c,d}
AUB={a,e,i,o,u,b,c,d}
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
Intersección
Ej
A={1,2,3}
B={2,3,4,5}
={2,3}
Complemento
Ej
A={1,2,3}
Comp(A)={4}
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
• La extensión natural para las operaciones está dada por
Unión difusa standard
Intersección difusa standard
Complemento difuso standard
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
Aplicación sencilla
• Supongamos que una persona cualquiera desea ir a tomar una cerveza a un local tradicional, que la cerveza sea barata y que el local quede cerca de su casa
• El dispone de 4 lugares conocidos
• Tiene sed
• Aquí podemos distinguir tres conjuntos difusos
1) Cerveza barata
2) Local tradicional
3) Cercanía a su hogar
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
• Para él :
Una cerveza barata es una que cueste alrededor de $1000 o menos
Un local tradicional es un local que al menos tenga 5 años funcionando.
Que quede cerca de su casa es que no quede a más de 10 cuadras
• Según las preferencias del individuo se pueden construir los siguientes conjuntos difusos
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
Características de los locales
• Debido al planteamiento debemos intersectar los conjuntos
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
• La solución clásica impone que
Precio cerveza<=$1000
Años de servicio>=5 años
Cuadras<=10 cuadras
• Como se deben intersectar los conjuntos, según la solución clásica el local debe estar a lo mas a 10 cuadras, tener a lo menos 5 años de servicio y que la cerveza cueste a lo más $1000
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
SOLUCIÓN
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
• Mediante la solución clásica el individuo se hubiera quedado en su hogar, lo cual no es “consistente” con la hipótesis “Tiene Sed”.
• Mediante la solución difusa deducimos que el individuo posiblemente hubiera ido al Local 3 a disfrutar su cerveza
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
Sistemas Difusos: Fundamentos
Lógica clásica ( una revisión rápida)
En lógica clásica una proposición “p” puede tener dos valores:
ser verdadera (v)
ser Falsa (f)
También se definen varios conectivos tales como:
Y
o entonces si solo si negación
p
q
pq
pq
pq
pq
T
T
F
F
T
F
T
F
T
F
F
F
T
T
T
F
T
F
T
T
T
F
F
T
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
~p
F
F
T
T
2010/2
2009/2
SISTEMAS DIFUSOS
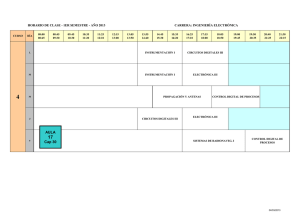
Sistemas difusos (modelo difuso): una visión de alto nivel
Establecen un mapeo no lineal entre un vector de datos de entrada
a una salida escalar (MISO).
Y= f(x)
Sistema Difuso
xUn
y
Reglas
¨Defuzificador¨
¨Fuzificador¨
Mecanismo
inferencia
salida
Vector de entrada
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2
Bibliografía básica (módulo sistemas Difusos)
• “Neuro-Fuzzy and soft computing”, J.S. Roger Jang, C. Tsai Sun, Eiji
Mizutami, Prentice Hall, 1997.
• “Learning and soft computing: support vector machines, neural
networks, and fuzzy logic models” Vojislav Kecman. MIT Press, 2001.
• “Fuzzy systems for Engineering: a tutorial”,J. Mendel, Procedding of
IEEE Vol. 83, No. 3, March 1995.
• “Fuzzy Logic, Identification and predictive Control”, Jairo Espinosa,
Joos Vandewalle and Vencent Wert, Springer 2004.
• Proceeding of IEEE, IEEE trans. On Fuzzy Systems, Fuzzy sets and
Systems, IEEE Trans. Systems, Man and Cybernectics
ControlEmbebidos
e Instrumentación Electrónica
Sistemas
UNIVERSIDAD EAFIT
2010/2
2009/2