Una introducción a los sistemas complementarios (a partir de un
Anuncio

Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Una introducción a los sistemas complementarios
(a partir de un curso de H. Schumacher y K. Çamlibel)
E. Fossas (en colaboración con Carles Batlle)
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Objetivo
presentar los sistemas complementarios como una herramienta útil
para modelar y analizar un caso particular de sistemas híbridos.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Indice
1
Sistemas Híbridos
1
2
3
2
Autómatas Híbridos
Ejemplos
Observaciones
Sistemas complementarios
1
2
3
4
5
6
7
Definición, ejemplos.
Sistemas lineales complementarios.
Modos.
Caso bimodal.
Soluciones, sistemas bien condicionados.
Métodos de integración.
Caso general
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Indice
1
Sistemas Híbridos
1
2
3
2
Autómatas Híbridos
Ejemplos
Observaciones
Sistemas complementarios
1
2
3
4
5
6
7
Definición, ejemplos.
Sistemas lineales complementarios.
Modos.
Caso bimodal.
Soluciones, sistemas bien condicionados.
Métodos de integración.
Caso general
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Indice
1
Sistemas Híbridos
1
2
3
2
Autómatas Híbridos
Ejemplos
Observaciones
Sistemas complementarios
1
2
3
4
5
6
7
Definición, ejemplos.
Sistemas lineales complementarios.
Modos.
Caso bimodal.
Soluciones, sistemas bien condicionados.
Métodos de integración.
Caso general
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Indice
1
Sistemas Híbridos
1
2
3
2
Autómatas Híbridos
Ejemplos
Observaciones
Sistemas complementarios
1
2
3
4
5
6
7
Definición, ejemplos.
Sistemas lineales complementarios.
Modos.
Caso bimodal.
Soluciones, sistemas bien condicionados.
Métodos de integración.
Caso general
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Indice
1
Sistemas Híbridos
1
2
3
2
Autómatas Híbridos
Ejemplos
Observaciones
Sistemas complementarios
1
2
3
4
5
6
7
Definición, ejemplos.
Sistemas lineales complementarios.
Modos.
Caso bimodal.
Soluciones, sistemas bien condicionados.
Métodos de integración.
Caso general
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Indice
1
Sistemas Híbridos
1
2
3
2
Autómatas Híbridos
Ejemplos
Observaciones
Sistemas complementarios
1
2
3
4
5
6
7
Definición, ejemplos.
Sistemas lineales complementarios.
Modos.
Caso bimodal.
Soluciones, sistemas bien condicionados.
Métodos de integración.
Caso general
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Indice
1
Sistemas Híbridos
1
2
3
2
Autómatas Híbridos
Ejemplos
Observaciones
Sistemas complementarios
1
2
3
4
5
6
7
Definición, ejemplos.
Sistemas lineales complementarios.
Modos.
Caso bimodal.
Soluciones, sistemas bien condicionados.
Métodos de integración.
Caso general
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Indice
1
Sistemas Híbridos
1
2
3
2
Autómatas Híbridos
Ejemplos
Observaciones
Sistemas complementarios
1
2
3
4
5
6
7
Definición, ejemplos.
Sistemas lineales complementarios.
Modos.
Caso bimodal.
Soluciones, sistemas bien condicionados.
Métodos de integración.
Caso general
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Indice
1
Sistemas Híbridos
1
2
3
2
Autómatas Híbridos
Ejemplos
Observaciones
Sistemas complementarios
1
2
3
4
5
6
7
Definición, ejemplos.
Sistemas lineales complementarios.
Modos.
Caso bimodal.
Soluciones, sistemas bien condicionados.
Métodos de integración.
Caso general
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Indice
1
Sistemas Híbridos
1
2
3
2
Autómatas Híbridos
Ejemplos
Observaciones
Sistemas complementarios
1
2
3
4
5
6
7
Definición, ejemplos.
Sistemas lineales complementarios.
Modos.
Caso bimodal.
Soluciones, sistemas bien condicionados.
Métodos de integración.
Caso general
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Indice
1
Sistemas Híbridos
1
2
3
2
Autómatas Híbridos
Ejemplos
Observaciones
Sistemas complementarios
1
2
3
4
5
6
7
Definición, ejemplos.
Sistemas lineales complementarios.
Modos.
Caso bimodal.
Soluciones, sistemas bien condicionados.
Métodos de integración.
Caso general
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Indice
1
Sistemas Híbridos
1
2
3
2
Autómatas Híbridos
Ejemplos
Observaciones
Sistemas complementarios
1
2
3
4
5
6
7
Definición, ejemplos.
Sistemas lineales complementarios.
Modos.
Caso bimodal.
Soluciones, sistemas bien condicionados.
Métodos de integración.
Caso general
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
Sistemas híbridos
Los sistemas híbridos son sistemas dinámicos descritos
mediante variables continuas y variables discretas.
Se definen mediante:
campos vectoriales C k indexados por variables discretas,
dominios a los que deben pertenecer las trayectorias definidas
por cada uno de esos campos vectoriales,
condiciones bajo las cuales el sistema dinámico cambia,
condiciones de reinicialización.
Permiten modelar sistemas dinámicos continuos a trozos.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
Sistemas híbridos
Los sistemas híbridos son sistemas dinámicos descritos
mediante variables continuas y variables discretas.
Se definen mediante:
campos vectoriales C k indexados por variables discretas,
dominios a los que deben pertenecer las trayectorias definidas
por cada uno de esos campos vectoriales,
condiciones bajo las cuales el sistema dinámico cambia,
condiciones de reinicialización.
Permiten modelar sistemas dinámicos continuos a trozos.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
Sistemas híbridos
Los sistemas híbridos son sistemas dinámicos descritos
mediante variables continuas y variables discretas.
Se definen mediante:
campos vectoriales C k indexados por variables discretas,
dominios a los que deben pertenecer las trayectorias definidas
por cada uno de esos campos vectoriales,
condiciones bajo las cuales el sistema dinámico cambia,
condiciones de reinicialización.
Permiten modelar sistemas dinámicos continuos a trozos.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
Sistemas híbridos
Los sistemas híbridos son sistemas dinámicos descritos
mediante variables continuas y variables discretas.
Se definen mediante:
campos vectoriales C k indexados por variables discretas,
dominios a los que deben pertenecer las trayectorias definidas
por cada uno de esos campos vectoriales,
condiciones bajo las cuales el sistema dinámico cambia,
condiciones de reinicialización.
Permiten modelar sistemas dinámicos continuos a trozos.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
Sistemas híbridos
Los sistemas híbridos son sistemas dinámicos descritos
mediante variables continuas y variables discretas.
Se definen mediante:
campos vectoriales C k indexados por variables discretas,
dominios a los que deben pertenecer las trayectorias definidas
por cada uno de esos campos vectoriales,
condiciones bajo las cuales el sistema dinámico cambia,
condiciones de reinicialización.
Permiten modelar sistemas dinámicos continuos a trozos.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
Sistemas híbridos
Los sistemas híbridos son sistemas dinámicos descritos
mediante variables continuas y variables discretas.
Se definen mediante:
campos vectoriales C k indexados por variables discretas,
dominios a los que deben pertenecer las trayectorias definidas
por cada uno de esos campos vectoriales,
condiciones bajo las cuales el sistema dinámico cambia,
condiciones de reinicialización.
Permiten modelar sistemas dinámicos continuos a trozos.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
Sistemas híbridos
Los sistemas híbridos son sistemas dinámicos descritos
mediante variables continuas y variables discretas.
Se definen mediante:
campos vectoriales C k indexados por variables discretas,
dominios a los que deben pertenecer las trayectorias definidas
por cada uno de esos campos vectoriales,
condiciones bajo las cuales el sistema dinámico cambia,
condiciones de reinicialización.
Permiten modelar sistemas dinámicos continuos a trozos.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
Autómatas híbridos
Una definición comunmente aceptada de sistema híbrido es la
de autómata híbrido.
Un autómata híbrido es básicamente un grafo dirigido al que
se han asociado sistemas dinámicos continuos a los vértices y
condiciones de transición a los ejes.
Se define mediante un conjunto H = {V, X, f, Init, Inv, Jump},
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
Autómatas híbridos
Una definición comunmente aceptada de sistema híbrido es la
de autómata híbrido.
Un autómata híbrido es básicamente un grafo dirigido al que
se han asociado sistemas dinámicos continuos a los vértices y
condiciones de transición a los ejes.
Se define mediante un conjunto H = {V, X, f, Init, Inv, Jump},
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
Autómatas híbridos
Una definición comunmente aceptada de sistema híbrido es la
de autómata híbrido.
Un autómata híbrido es básicamente un grafo dirigido al que
se han asociado sistemas dinámicos continuos a los vértices y
condiciones de transición a los ejes.
Se define mediante un conjunto H = {V, X, f, Init, Inv, Jump},
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
Autómatas híbridos
Una definición comunmente aceptada de sistema híbrido es la
de autómata híbrido.
Un autómata híbrido es básicamente un grafo dirigido al que
se han asociado sistemas dinámicos continuos a los vértices y
condiciones de transición a los ejes.
Se define mediante un conjunto H = {V, X, f, Init, Inv, Jump},
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
Autómatas híbridos (ii)
V es un conjunto finito. Indexa las diversas dinámicas.
X = {x1 , . . . , xn } conjunto finito y ordenado de variables.
f : V × Rn −→ Rn . Define la dinámica continua en cada uno
de los modos discretos mediante la ecuación ẋ = f (v, x).
Init : V −→ ℘ (Rn ).
Define el conjunto de estados iniciales admisibles.
Inv : V −→ ℘ (Rn ). Las trayectorias definidas por f (v, x)
deben pertenecer al conjunto Inv(v).
Jump : V × Rn −→ ℘ (Rn ) Especifica las transiciones.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
Autómatas híbridos (ii)
V es un conjunto finito. Indexa las diversas dinámicas.
X = {x1 , . . . , xn } conjunto finito y ordenado de variables.
f : V × Rn −→ Rn . Define la dinámica continua en cada uno
de los modos discretos mediante la ecuación ẋ = f (v, x).
Init : V −→ ℘ (Rn ).
Define el conjunto de estados iniciales admisibles.
Inv : V −→ ℘ (Rn ). Las trayectorias definidas por f (v, x)
deben pertenecer al conjunto Inv(v).
Jump : V × Rn −→ ℘ (Rn ) Especifica las transiciones.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
Autómatas híbridos (ii)
V es un conjunto finito. Indexa las diversas dinámicas.
X = {x1 , . . . , xn } conjunto finito y ordenado de variables.
f : V × Rn −→ Rn . Define la dinámica continua en cada uno
de los modos discretos mediante la ecuación ẋ = f (v, x).
Init : V −→ ℘ (Rn ).
Define el conjunto de estados iniciales admisibles.
Inv : V −→ ℘ (Rn ). Las trayectorias definidas por f (v, x)
deben pertenecer al conjunto Inv(v).
Jump : V × Rn −→ ℘ (Rn ) Especifica las transiciones.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
Autómatas híbridos (ii)
V es un conjunto finito. Indexa las diversas dinámicas.
X = {x1 , . . . , xn } conjunto finito y ordenado de variables.
f : V × Rn −→ Rn . Define la dinámica continua en cada uno
de los modos discretos mediante la ecuación ẋ = f (v, x).
Init : V −→ ℘ (Rn ).
Define el conjunto de estados iniciales admisibles.
Inv : V −→ ℘ (Rn ). Las trayectorias definidas por f (v, x)
deben pertenecer al conjunto Inv(v).
Jump : V × Rn −→ ℘ (Rn ) Especifica las transiciones.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
Autómatas híbridos (ii)
V es un conjunto finito. Indexa las diversas dinámicas.
X = {x1 , . . . , xn } conjunto finito y ordenado de variables.
f : V × Rn −→ Rn . Define la dinámica continua en cada uno
de los modos discretos mediante la ecuación ẋ = f (v, x).
Init : V −→ ℘ (Rn ).
Define el conjunto de estados iniciales admisibles.
Inv : V −→ ℘ (Rn ). Las trayectorias definidas por f (v, x)
deben pertenecer al conjunto Inv(v).
Jump : V × Rn −→ ℘ (Rn ) Especifica las transiciones.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
Autómatas híbridos (ii)
V es un conjunto finito. Indexa las diversas dinámicas.
X = {x1 , . . . , xn } conjunto finito y ordenado de variables.
f : V × Rn −→ Rn . Define la dinámica continua en cada uno
de los modos discretos mediante la ecuación ẋ = f (v, x).
Init : V −→ ℘ (Rn ).
Define el conjunto de estados iniciales admisibles.
Inv : V −→ ℘ (Rn ). Las trayectorias definidas por f (v, x)
deben pertenecer al conjunto Inv(v).
Jump : V × Rn −→ ℘ (Rn ) Especifica las transiciones.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
Ejecuciones (i)
Se definen mediante un conjunto (posiblemente infinito) de ternas
(τ, v, x) totalmente ordenadas donde
0 ,
τj = [τj0 , τj1 ] verificando τj0 ≤ τj1 y τj1 = τj+1
xj (t) es solución de ẋ = f (vj , x) con condiciones iniciales
xj (τj0 ) ∈ Init(vj ) para t ∈ [τj0 , τj1 ] y además xj (t) ∈ Inv(vj )
para t ∈ [τj0 , τj1 ),
0 ) ∈ Jump(v , x (τ 1 ))
xj+1 (τj+1
j
j j
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
Ejecuciones (i)
Se definen mediante un conjunto (posiblemente infinito) de ternas
(τ, v, x) totalmente ordenadas donde
0 ,
τj = [τj0 , τj1 ] verificando τj0 ≤ τj1 y τj1 = τj+1
xj (t) es solución de ẋ = f (vj , x) con condiciones iniciales
xj (τj0 ) ∈ Init(vj ) para t ∈ [τj0 , τj1 ] y además xj (t) ∈ Inv(vj )
para t ∈ [τj0 , τj1 ),
0 ) ∈ Jump(v , x (τ 1 ))
xj+1 (τj+1
j
j j
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
Ejecuciones (i)
Se definen mediante un conjunto (posiblemente infinito) de ternas
(τ, v, x) totalmente ordenadas donde
0 ,
τj = [τj0 , τj1 ] verificando τj0 ≤ τj1 y τj1 = τj+1
xj (t) es solución de ẋ = f (vj , x) con condiciones iniciales
xj (τj0 ) ∈ Init(vj ) para t ∈ [τj0 , τj1 ] y además xj (t) ∈ Inv(vj )
para t ∈ [τj0 , τj1 ),
0 ) ∈ Jump(v , x (τ 1 ))
xj+1 (τj+1
j
j j
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
Ejecuciones (i)
Se definen mediante un conjunto (posiblemente infinito) de ternas
(τ, v, x) totalmente ordenadas donde
0 ,
τj = [τj0 , τj1 ] verificando τj0 ≤ τj1 y τj1 = τj+1
xj (t) es solución de ẋ = f (vj , x) con condiciones iniciales
xj (τj0 ) ∈ Init(vj ) para t ∈ [τj0 , τj1 ] y además xj (t) ∈ Inv(vj )
para t ∈ [τj0 , τj1 ),
0 ) ∈ Jump(v , x (τ 1 ))
xj+1 (τj+1
j
j j
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
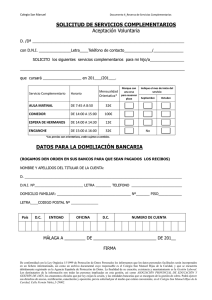
Ejecuciones (ii)
6
v
•
-
6
x
•
τ10
τ11
τ20
τ21
τ30
τ31
τ40
τ41
Ejemplo de una ejecución
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
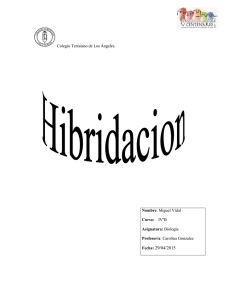
Ejemplo (i)
qin
x1
r1
x2
r2
q1
q2
Sistema de control de dos
tanques de agua.
E. Fossas (en colaboración con Carles Batlle)
x1 , x2 volumen
q1 > 0, q2 > 0 caudal
qin caudal constante
r1 , r2 especificaciones
x1 (0) > r1 y x2 (0) > r2
Datos: r1 = r2 = 1,
(q1 , q2 , qin ) = (2, 3, 4)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
Ejemplo (i)
qin
x1
r1
x2
r2
q1
q2
Sistema de control de dos
tanques de agua.
E. Fossas (en colaboración con Carles Batlle)
x1 , x2 volumen
q1 > 0, q2 > 0 caudal
qin caudal constante
r1 , r2 especificaciones
x1 (0) > r1 y x2 (0) > r2
Datos: r1 = r2 = 1,
(q1 , q2 , qin ) = (2, 3, 4)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
Ejemplo (i)
qin
x1
r1
x2
r2
q1
q2
Sistema de control de dos
tanques de agua.
E. Fossas (en colaboración con Carles Batlle)
x1 , x2 volumen
q1 > 0, q2 > 0 caudal
qin caudal constante
r1 , r2 especificaciones
x1 (0) > r1 y x2 (0) > r2
Datos: r1 = r2 = 1,
(q1 , q2 , qin ) = (2, 3, 4)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
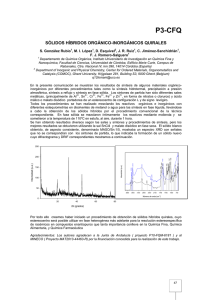
Ejemplo (ii)
x2 ≤ 1
v1
v2
ẋ1 = −2
ẋ2 = 1
x1 ≥ 1
ẋ1 = 2
ẋ2 = −3
x2 ≥ 1
x1 ≤ 1
Autómata híbrido para el sistema de dos tanques de agua.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
Ejemplo (iii)
V = {v1 , v2 },
X = {x1 , x2 },
f (v1 , x) = (2, −3) y f (v2 , x) = (−2, 1)
Init(vi ) = {x ∈ R2 : x1 > 1, x2 > 1}, i = 1, 2
Inv(v1 ) = {x ∈ R2 : x2 ≥ 1} y Inv(v2 ) = {x ∈ R2 : x1 ≥ 1}
{(v1 , x)} si v = v2 y x1 ≤ 1
Jump(v, x) =
{(v2 , x)} si v = v1 y x2 ≤ 1
{(v, x)} en otro caso
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
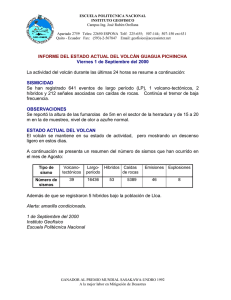
Ejemplo (iv)
2.8
2.6
2.4
x
2.2
1
2
1.8
1.6
1.4
x
2
1.2
1
0.8
0
0.5
1
1.5
time
Una ejecución del autómata híbrido para el sistema de dos tanques
de agua.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
Comentarios
En muchas aplicaciones los sistemas que se consideran
contienen un número elevado de subsistemas discretos, por
ejemplo, una red eléctrica con 10 interruptores da lugar a
210 = 1024 eventos.
Para definir un autómata híbrido se requiere especificar
explícitamente las circunstancias que dan lugar a las
transiciones. Una descripción implícita puede ser más sencilla
de manejar.
La noción de autómata híbrido es muy amplia. Es preferible
considerar sistemas con cierta estructura.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
Comentarios
En muchas aplicaciones los sistemas que se consideran
contienen un número elevado de subsistemas discretos, por
ejemplo, una red eléctrica con 10 interruptores da lugar a
210 = 1024 eventos.
Para definir un autómata híbrido se requiere especificar
explícitamente las circunstancias que dan lugar a las
transiciones. Una descripción implícita puede ser más sencilla
de manejar.
La noción de autómata híbrido es muy amplia. Es preferible
considerar sistemas con cierta estructura.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Autómatas híbridos (i)
Ejecuciones
Ejemplo
Comentarios
Comentarios
En muchas aplicaciones los sistemas que se consideran
contienen un número elevado de subsistemas discretos, por
ejemplo, una red eléctrica con 10 interruptores da lugar a
210 = 1024 eventos.
Para definir un autómata híbrido se requiere especificar
explícitamente las circunstancias que dan lugar a las
transiciones. Una descripción implícita puede ser más sencilla
de manejar.
La noción de autómata híbrido es muy amplia. Es preferible
considerar sistemas con cierta estructura.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Sistemas complementarios. Definición (i)
Los sistemas complementarios forman una clase particular de
sistemas híbridos. Se definen mediante un campo vectorial,
una función de salida
ẋ = f (x, ω)
y = h(x, ω),
x ∈ Rn , y ∈ R, ω ∈ R,
y una condición implícita para las transiciones
{(y, ω) ∈ R2 |[y ≥ 0 y ω = 0] o [ω ≥ 0 y y = 0]}
que se escribe
0 ≤ y ⊥ ω ≥ 0,
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Sistemas complementarios. Definición (i)
Los sistemas complementarios forman una clase particular de
sistemas híbridos. Se definen mediante un campo vectorial,
una función de salida
ẋ = f (x, ω)
y = h(x, ω),
x ∈ Rn , y ∈ R, ω ∈ R,
y una condición implícita para las transiciones
{(y, ω) ∈ R2 |[y ≥ 0 y ω = 0] o [ω ≥ 0 y y = 0]}
que se escribe
0 ≤ y ⊥ ω ≥ 0,
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Sistemas complementarios. Definición (ii)
La misma notación se aplica al caso vectorial y ∈ Rk , ω ∈ Rk .
Nótese que 0 ≤ y ⊥ ω ≥ 0 implica 0 ≤ yi ⊥ ωi ≥ 0.
Una condición inicial x0 es factible si existen y0 , ω0 solución
de y = h(x, ω) que satiafacen las condiciones de
complementariedad.
Los sitemas complementarios son un caso particular de
sistemas cono-complementarios
C ∋ y ⊥ ω ∈ C∗
donde C es un cono en Rn y C ∗ es el cono dual.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Sistemas complementarios. Definición (ii)
La misma notación se aplica al caso vectorial y ∈ Rk , ω ∈ Rk .
Nótese que 0 ≤ y ⊥ ω ≥ 0 implica 0 ≤ yi ⊥ ωi ≥ 0.
Una condición inicial x0 es factible si existen y0 , ω0 solución
de y = h(x, ω) que satiafacen las condiciones de
complementariedad.
Los sitemas complementarios son un caso particular de
sistemas cono-complementarios
C ∋ y ⊥ ω ∈ C∗
donde C es un cono en Rn y C ∗ es el cono dual.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Sistemas complementarios. Definición (ii)
La misma notación se aplica al caso vectorial y ∈ Rk , ω ∈ Rk .
Nótese que 0 ≤ y ⊥ ω ≥ 0 implica 0 ≤ yi ⊥ ωi ≥ 0.
Una condición inicial x0 es factible si existen y0 , ω0 solución
de y = h(x, ω) que satiafacen las condiciones de
complementariedad.
Los sitemas complementarios son un caso particular de
sistemas cono-complementarios
C ∋ y ⊥ ω ∈ C∗
donde C es un cono en Rn y C ∗ es el cono dual.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Ejemplo (i)
~
~
~
~
Hipótesis: resortes lineales, sin fricción, constantes normalizadas a
1, colisiones completamente inelásticas.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Ejemplo (i)
~
~
~
~
Hipótesis: resortes lineales, sin fricción, constantes normalizadas a
1, colisiones completamente inelásticas.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Ejemplo (i)
~
~
~
~
Hipótesis: resortes lineales, sin fricción, constantes normalizadas a
1, colisiones completamente inelásticas.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Ejemplo (ii)
Ecuaciones
q̈1 = −2q1 + q2 + λ
q̈2
+
q̇1 (timp )
= q1 − q2
= 0
mboxJumprule
q1 , q2 denotan las desviaciones respecto a la posición de equilibrio.
λ es la fuerza ejercida por el tope contra la vagoneta 1.
0 ≤ q1 ⊥ λ ≥ 0
En todo momento q1 (t) = 0 o λ(t) = 0.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Ejemplo (iii)
λ = 0 La dinámica viene dada por
q̈1 = −2q1 + q2 + 0
q̈2 = q1 − q2
mientras q1 > 0.
q1 (t1 ) = 0 Si q̇1 (t1 ) > 0 el sistema evoluciona como en el caso
anterior; si q̇1 (t1 ) < 0, q1 (t) = 0 para t ∈ [t1 , t1 + ε). En
consecuencia q1 ≡ 0, q̇1 ≡ 0 y q̈1 ≡ 0 y se tiene
λ(t) = 2q1 (t) − q2 (t) = −q2 (t)
El sistema evoluciona en el subespacio q1 = 0, q̇1 = 0. Está
gobernado por la dinámica
q̈2 = −q2
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Ejemplo (iii)
λ = 0 La dinámica viene dada por
q̈1 = −2q1 + q2 + 0
q̈2 = q1 − q2
mientras q1 > 0.
q1 (t1 ) = 0 Si q̇1 (t1 ) > 0 el sistema evoluciona como en el caso
anterior; si q̇1 (t1 ) < 0, q1 (t) = 0 para t ∈ [t1 , t1 + ε). En
consecuencia q1 ≡ 0, q̇1 ≡ 0 y q̈1 ≡ 0 y se tiene
λ(t) = 2q1 (t) − q2 (t) = −q2 (t)
El sistema evoluciona en el subespacio q1 = 0, q̇1 = 0. Está
gobernado por la dinámica
q̈2 = −q2
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Ejemplo (iii)
λ = 0 La dinámica viene dada por
q̈1 = −2q1 + q2 + 0
q̈2 = q1 − q2
mientras q1 > 0.
q1 (t1 ) = 0 Si q̇1 (t1 ) > 0 el sistema evoluciona como en el caso
anterior; si q̇1 (t1 ) < 0, q1 (t) = 0 para t ∈ [t1 , t1 + ε). En
consecuencia q1 ≡ 0, q̇1 ≡ 0 y q̈1 ≡ 0 y se tiene
λ(t) = 2q1 (t) − q2 (t) = −q2 (t)
El sistema evoluciona en el subespacio q1 = 0, q̇1 = 0. Está
gobernado por la dinámica
q̈2 = −q2
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Ejemplo (iii)
λ = 0 La dinámica viene dada por
q̈1 = −2q1 + q2 + 0
q̈2 = q1 − q2
mientras q1 > 0.
q1 (t1 ) = 0 Si q̇1 (t1 ) > 0 el sistema evoluciona como en el caso
anterior; si q̇1 (t1 ) < 0, q1 (t) = 0 para t ∈ [t1 , t1 + ε). En
consecuencia q1 ≡ 0, q̇1 ≡ 0 y q̈1 ≡ 0 y se tiene
λ(t) = 2q1 (t) − q2 (t) = −q2 (t)
El sistema evoluciona en el subespacio q1 = 0, q̇1 = 0. Está
gobernado por la dinámica
q̈2 = −q2
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Ejemplo (iii)
λ = 0 La dinámica viene dada por
q̈1 = −2q1 + q2 + 0
q̈2 = q1 − q2
mientras q1 > 0.
q1 (t1 ) = 0 Si q̇1 (t1 ) > 0 el sistema evoluciona como en el caso
anterior; si q̇1 (t1 ) < 0, q1 (t) = 0 para t ∈ [t1 , t1 + ε). En
consecuencia q1 ≡ 0, q̇1 ≡ 0 y q̈1 ≡ 0 y se tiene
λ(t) = 2q1 (t) − q2 (t) = −q2 (t)
El sistema evoluciona en el subespacio q1 = 0, q̇1 = 0. Está
gobernado por la dinámica
q̈2 = −q2
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Sistemas lineales complementarios (i)
Son sistemas complementarios en los que el campo vectorial es
lineal.
ẋ = Ax + Bω
y = Cx + Dω
0≤y⊥ω≥0
x0 es una condición inicial factible si, y solamente si, el problema
lineal complementario
y = Cx0 + Dω,
0≤y⊥ω≥0
tiene solución.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Sistemas lineales complementarios (i)
Son sistemas complementarios en los que el campo vectorial es
lineal.
ẋ = Ax + Bω
y = Cx + Dω
0≤y⊥ω≥0
x0 es una condición inicial factible si, y solamente si, el problema
lineal complementario
y = Cx0 + Dω,
0≤y⊥ω≥0
tiene solución.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Sistemas lineales complementarios (ii)
Observación El problema lineal complementario se define de la
siguiente forma: dados q ∈ Rm y M ∈ Rm×n , hallar y, ω ∈ Rm
solución de
y = q + Mω y 0 ≤ y ⊥ ω ≥ 0
Teorema [Samelson/Thrall/Wesler, 1958] LCP (q, M ) tiene una
solución única para cualquier q si, y solamente si, todos los menores
principales de M son positivos.
Una matriz que satisface esta condición se denomina P −matriz.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Modos (i)
Sea el sistema lineal complementario
ẋ = Ax + Bω
y = Cx + Dω
0≤y⊥ω≥0
A consecuencia de las condiciones de complementariedad, en cada
instante t, se tiene un conjunto de índices α tal que
yi (t) = 0 (i ∈ α),
ωi = 0 (i 6∈ α)
De esta forma se define un modo.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Modos (i)
Sea el sistema lineal complementario
ẋ = Ax + Bω
y = Cx + Dω
0≤y⊥ω≥0
A consecuencia de las condiciones de complementariedad, en cada
instante t, se tiene un conjunto de índices α tal que
yi (t) = 0 (i ∈ α),
ωi = 0 (i 6∈ α)
De esta forma se define un modo.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Modos (ii)
La dinámica en el modo α está definida por
ẋ = Ax + B•α ωα
0 = Cα• x + Dαα ωα
donde B•α es la matriz formada por los elementos bij con
1 ≤ i ≤ k y j ∈ α (idem para las demás matrices y vectores).
Se ha obtenido un sistema algebro-diferencial que, bajo ciertas
condiciones, tiene solución única.
La solución determina las cantidades
ωα y yαc = Cαc • x + Dαc α ωα
El sistema evoluciona en el modo α mientras ω ≥ 0 y y ≥ 0.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Modos (ii)
La dinámica en el modo α está definida por
ẋ = Ax + B•α ωα
0 = Cα• x + Dαα ωα
donde B•α es la matriz formada por los elementos bij con
1 ≤ i ≤ k y j ∈ α (idem para las demás matrices y vectores).
Se ha obtenido un sistema algebro-diferencial que, bajo ciertas
condiciones, tiene solución única.
La solución determina las cantidades
ωα y yαc = Cαc • x + Dαc α ωα
El sistema evoluciona en el modo α mientras ω ≥ 0 y y ≥ 0.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Modos (ii)
La dinámica en el modo α está definida por
ẋ = Ax + B•α ωα
0 = Cα• x + Dαα ωα
donde B•α es la matriz formada por los elementos bij con
1 ≤ i ≤ k y j ∈ α (idem para las demás matrices y vectores).
Se ha obtenido un sistema algebro-diferencial que, bajo ciertas
condiciones, tiene solución única.
La solución determina las cantidades
ωα y yαc = Cαc • x + Dαc α ωα
El sistema evoluciona en el modo α mientras ω ≥ 0 y y ≥ 0.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
El caso bimodal, índice cero
Considérese el sistema lineal complementario con un único par de
variables complementarias.
ẋ = Ax + bω,
y = cT x + dω,
0≤y⊥ω≥0
donde b y c son vectores y d es un escalar.
Supongamos d 6= 0 índice cero.
Modo ω = 0 ẋ = Ax, y = cT x ≥ 0.
Modo y = 0 ẋ = Ax + bω, cT x + dω = 0,
que se puede reescribir como
ẋ = A − bd−1 cT x,
ω = −d−1 cT x ≥ 0
Ambos campos vectoriales coinciden en cT x = 0.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
El caso bimodal, índice cero
Considérese el sistema lineal complementario con un único par de
variables complementarias.
ẋ = Ax + bω,
y = cT x + dω,
0≤y⊥ω≥0
donde b y c son vectores y d es un escalar.
Supongamos d 6= 0 índice cero.
Modo ω = 0 ẋ = Ax, y = cT x ≥ 0.
Modo y = 0 ẋ = Ax + bω, cT x + dω = 0,
que se puede reescribir como
ẋ = A − bd−1 cT x,
ω = −d−1 cT x ≥ 0
Ambos campos vectoriales coinciden en cT x = 0.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
El caso bimodal, índice cero
Considérese el sistema lineal complementario con un único par de
variables complementarias.
ẋ = Ax + bω,
y = cT x + dω,
0≤y⊥ω≥0
donde b y c son vectores y d es un escalar.
Supongamos d 6= 0 índice cero.
Modo ω = 0 ẋ = Ax, y = cT x ≥ 0.
Modo y = 0 ẋ = Ax + bω, cT x + dω = 0,
que se puede reescribir como
ẋ = A − bd−1 cT x,
ω = −d−1 cT x ≥ 0
Ambos campos vectoriales coinciden en cT x = 0.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
El caso bimodal, índice cero
Considérese el sistema lineal complementario con un único par de
variables complementarias.
ẋ = Ax + bω,
y = cT x + dω,
0≤y⊥ω≥0
donde b y c son vectores y d es un escalar.
Supongamos d 6= 0 índice cero.
Modo ω = 0 ẋ = Ax, y = cT x ≥ 0.
Modo y = 0 ẋ = Ax + bω, cT x + dω = 0,
que se puede reescribir como
ẋ = A − bd−1 cT x,
ω = −d−1 cT x ≥ 0
Ambos campos vectoriales coinciden en cT x = 0.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
El caso bimodal, índice cero
Considérese el sistema lineal complementario con un único par de
variables complementarias.
ẋ = Ax + bω,
y = cT x + dω,
0≤y⊥ω≥0
donde b y c son vectores y d es un escalar.
Supongamos d 6= 0 índice cero.
Modo ω = 0 ẋ = Ax, y = cT x ≥ 0.
Modo y = 0 ẋ = Ax + bω, cT x + dω = 0,
que se puede reescribir como
ẋ = A − bd−1 cT x,
ω = −d−1 cT x ≥ 0
Ambos campos vectoriales coinciden en cT x = 0.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
El caso bimodal, índice uno
Supongamos ahora d = 0.
Modo ω = 0
ẋ = Ax, y = cT x ≥ 0.
Modo y = 0
ẋ = Ax + bω, cT x = 0, ω ≥ 0.
Derivando se obtiene
cT (Ax + bω) = 0 ⇒ cT Ax + cT bω = 0
Supongamos cT b 6= 0 índice uno, entonces
−1 T
−1 T ω = − cT b
c Ax ≥ 0 y ẋ = I − b cT b
c Ax.
La dinámica evoluciona en el subespacio {x | cT x ≥ 0}.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
El caso bimodal, índice uno
Supongamos ahora d = 0.
Modo ω = 0
ẋ = Ax, y = cT x ≥ 0.
Modo y = 0
ẋ = Ax + bω, cT x = 0, ω ≥ 0.
Derivando se obtiene
cT (Ax + bω) = 0 ⇒ cT Ax + cT bω = 0
Supongamos cT b 6= 0 índice uno, entonces
−1 T
−1 T ω = − cT b
c Ax ≥ 0 y ẋ = I − b cT b
c Ax.
La dinámica evoluciona en el subespacio {x | cT x ≥ 0}.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
El caso bimodal, índice uno
Supongamos ahora d = 0.
Modo ω = 0
ẋ = Ax, y = cT x ≥ 0.
Modo y = 0
ẋ = Ax + bω, cT x = 0, ω ≥ 0.
Derivando se obtiene
cT (Ax + bω) = 0 ⇒ cT Ax + cT bω = 0
Supongamos cT b 6= 0 índice uno, entonces
−1 T
−1 T ω = − cT b
c Ax ≥ 0 y ẋ = I − b cT b
c Ax.
La dinámica evoluciona en el subespacio {x | cT x ≥ 0}.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
El caso bimodal, índice uno
Supongamos ahora d = 0.
Modo ω = 0
ẋ = Ax, y = cT x ≥ 0.
Modo y = 0
ẋ = Ax + bω, cT x = 0, ω ≥ 0.
Derivando se obtiene
cT (Ax + bω) = 0 ⇒ cT Ax + cT bω = 0
Supongamos cT b 6= 0 índice uno, entonces
−1 T
−1 T ω = − cT b
c Ax ≥ 0 y ẋ = I − b cT b
c Ax.
La dinámica evoluciona en el subespacio {x | cT x ≥ 0}.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
El caso bimodal, índice uno
Supongamos ahora d = 0.
Modo ω = 0
ẋ = Ax, y = cT x ≥ 0.
Modo y = 0
ẋ = Ax + bω, cT x = 0, ω ≥ 0.
Derivando se obtiene
cT (Ax + bω) = 0 ⇒ cT Ax + cT bω = 0
Supongamos cT b 6= 0 índice uno, entonces
−1 T
−1 T ω = − cT b
c Ax ≥ 0 y ẋ = I − b cT b
c Ax.
La dinámica evoluciona en el subespacio {x | cT x ≥ 0}.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
El caso bimodal, índice uno
Supongamos ahora d = 0.
Modo ω = 0
ẋ = Ax, y = cT x ≥ 0.
Modo y = 0
ẋ = Ax + bω, cT x = 0, ω ≥ 0.
Derivando se obtiene
cT (Ax + bω) = 0 ⇒ cT Ax + cT bω = 0
Supongamos cT b 6= 0 índice uno, entonces
−1 T
−1 T ω = − cT b
c Ax ≥ 0 y ẋ = I − b cT b
c Ax.
La dinámica evoluciona en el subespacio {x | cT x ≥ 0}.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
El caso bimodal, índice dos
Supongamos ahora d = 0, cT b = 0 y cT Ab 6= 0 índice dos.
Modo ω = 0
ẋ = Ax, y = cT x ≥ 0.
Modo y = 0
ẋ = Ax + bω, cT x = 0, ω ≥ 0.
T
La restricción c x = 0 ⇒ cT (Ax + bω) = 0 ⇒ cT Ax = 0.
Derivando de nuevo:
cT A (Ax + bω) = 0 ⇒ cT A2 x + cT Abω = 0
−1 T 2
ω = − cT Ab
c A x.
La dinámica en modo y = 0 evoluciona en el subespacio de
codimensión dos {x | cT x = 0, y cT Ax = 0}, que es un
subconjunto de la frontera del dominio correspondiente al modo
ω = 0; por lo tanto las trayectorias pueden presentar
discontinuidades en las variables de estado.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
El caso bimodal, índice dos
Supongamos ahora d = 0, cT b = 0 y cT Ab 6= 0 índice dos.
Modo ω = 0
ẋ = Ax, y = cT x ≥ 0.
Modo y = 0
ẋ = Ax + bω, cT x = 0, ω ≥ 0.
T
La restricción c x = 0 ⇒ cT (Ax + bω) = 0 ⇒ cT Ax = 0.
Derivando de nuevo:
cT A (Ax + bω) = 0 ⇒ cT A2 x + cT Abω = 0
−1 T 2
ω = − cT Ab
c A x.
La dinámica en modo y = 0 evoluciona en el subespacio de
codimensión dos {x | cT x = 0, y cT Ax = 0}, que es un
subconjunto de la frontera del dominio correspondiente al modo
ω = 0; por lo tanto las trayectorias pueden presentar
discontinuidades en las variables de estado.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
El caso bimodal, índice dos
Supongamos ahora d = 0, cT b = 0 y cT Ab 6= 0 índice dos.
Modo ω = 0
ẋ = Ax, y = cT x ≥ 0.
Modo y = 0
ẋ = Ax + bω, cT x = 0, ω ≥ 0.
T
La restricción c x = 0 ⇒ cT (Ax + bω) = 0 ⇒ cT Ax = 0.
Derivando de nuevo:
cT A (Ax + bω) = 0 ⇒ cT A2 x + cT Abω = 0
−1 T 2
ω = − cT Ab
c A x.
La dinámica en modo y = 0 evoluciona en el subespacio de
codimensión dos {x | cT x = 0, y cT Ax = 0}, que es un
subconjunto de la frontera del dominio correspondiente al modo
ω = 0; por lo tanto las trayectorias pueden presentar
discontinuidades en las variables de estado.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
El caso bimodal, índice dos
Supongamos ahora d = 0, cT b = 0 y cT Ab 6= 0 índice dos.
Modo ω = 0
ẋ = Ax, y = cT x ≥ 0.
Modo y = 0
ẋ = Ax + bω, cT x = 0, ω ≥ 0.
T
La restricción c x = 0 ⇒ cT (Ax + bω) = 0 ⇒ cT Ax = 0.
Derivando de nuevo:
cT A (Ax + bω) = 0 ⇒ cT A2 x + cT Abω = 0
−1 T 2
ω = − cT Ab
c A x.
La dinámica en modo y = 0 evoluciona en el subespacio de
codimensión dos {x | cT x = 0, y cT Ax = 0}, que es un
subconjunto de la frontera del dominio correspondiente al modo
ω = 0; por lo tanto las trayectorias pueden presentar
discontinuidades en las variables de estado.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
El caso bimodal, índice dos
Supongamos ahora d = 0, cT b = 0 y cT Ab 6= 0 índice dos.
Modo ω = 0
ẋ = Ax, y = cT x ≥ 0.
Modo y = 0
ẋ = Ax + bω, cT x = 0, ω ≥ 0.
T
La restricción c x = 0 ⇒ cT (Ax + bω) = 0 ⇒ cT Ax = 0.
Derivando de nuevo:
cT A (Ax + bω) = 0 ⇒ cT A2 x + cT Abω = 0
−1 T 2
ω = − cT Ab
c A x.
La dinámica en modo y = 0 evoluciona en el subespacio de
codimensión dos {x | cT x = 0, y cT Ax = 0}, que es un
subconjunto de la frontera del dominio correspondiente al modo
ω = 0; por lo tanto las trayectorias pueden presentar
discontinuidades en las variables de estado.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
El caso bimodal, índice dos
Supongamos ahora d = 0, cT b = 0 y cT Ab 6= 0 índice dos.
Modo ω = 0
ẋ = Ax, y = cT x ≥ 0.
Modo y = 0
ẋ = Ax + bω, cT x = 0, ω ≥ 0.
T
La restricción c x = 0 ⇒ cT (Ax + bω) = 0 ⇒ cT Ax = 0.
Derivando de nuevo:
cT A (Ax + bω) = 0 ⇒ cT A2 x + cT Abω = 0
−1 T 2
ω = − cT Ab
c A x.
La dinámica en modo y = 0 evoluciona en el subespacio de
codimensión dos {x | cT x = 0, y cT Ax = 0}, que es un
subconjunto de la frontera del dominio correspondiente al modo
ω = 0; por lo tanto las trayectorias pueden presentar
discontinuidades en las variables de estado.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Soluciones
Una terna (x(t), y(t), ω(t)) de funciones donde x(t) es continua y
diferenciable a trozos e y(t) y ω(t) son continuas a trozos es una
solución a futuro del sistema complementario
ẋ = f (x, ω)
y = h(x, ω),
0 ≤ y ⊥ ω ≥ 0,
si existe una sucesión creciente t0 < t1 < t2 , . . . de forma que en
cada intervalo (ti , ti+1 ) se verifiquen las ecuaciones que definen el
sistema complementario.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Soluciones (ii)
Observaciones
Con esta definición se obtienen soluciones continuas para las
variables de estado y puede darse el fenómeno de Zenón. Para
admitir discontinuidades en las variables de estado se necesita
una regla de reinicialización que, para sistemas lineales se
puede especificar de forma genérica.
No se tienen, en general, teoremas de existencia y unicidad de
soluciones.
En el caso lineal, asumiendo condiciones de pasividad para
(A, B, C, D), se tienen resultados que garantizan la existencia
de soluciones y caracterizan la unicidad.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Soluciones (ii)
Observaciones
Con esta definición se obtienen soluciones continuas para las
variables de estado y puede darse el fenómeno de Zenón. Para
admitir discontinuidades en las variables de estado se necesita
una regla de reinicialización que, para sistemas lineales se
puede especificar de forma genérica.
No se tienen, en general, teoremas de existencia y unicidad de
soluciones.
En el caso lineal, asumiendo condiciones de pasividad para
(A, B, C, D), se tienen resultados que garantizan la existencia
de soluciones y caracterizan la unicidad.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Soluciones (ii)
Observaciones
Con esta definición se obtienen soluciones continuas para las
variables de estado y puede darse el fenómeno de Zenón. Para
admitir discontinuidades en las variables de estado se necesita
una regla de reinicialización que, para sistemas lineales se
puede especificar de forma genérica.
No se tienen, en general, teoremas de existencia y unicidad de
soluciones.
En el caso lineal, asumiendo condiciones de pasividad para
(A, B, C, D), se tienen resultados que garantizan la existencia
de soluciones y caracterizan la unicidad.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Métodos de integración
Discretización y backward Euler.
xk+1 − xk
= Axk+1 + Bωk+1
h
yk+1 = Cxk+1 + Dωk+1
Resolviendo para xk+1 y sustituyendo se tiene
yk+1 = C(I − hA)−1 xk + [D + hC(I − hA)−1 B]ωk+1
Resolviendo el LCP y sustituyendo,
xk+1 := (I − hA)−1 xk + h(I − hA)−1 Bωk+1
Asumiendo condiciones de pasividad para (A, B, C, D), M. Hemels
y K. Çamlibel prueban la convergencia hacia la solución.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Métodos de integración
Discretización y backward Euler.
xk+1 − xk
= Axk+1 + Bωk+1
h
yk+1 = Cxk+1 + Dωk+1
Resolviendo para xk+1 y sustituyendo se tiene
yk+1 = C(I − hA)−1 xk + [D + hC(I − hA)−1 B]ωk+1
Resolviendo el LCP y sustituyendo,
xk+1 := (I − hA)−1 xk + h(I − hA)−1 Bωk+1
Asumiendo condiciones de pasividad para (A, B, C, D), M. Hemels
y K. Çamlibel prueban la convergencia hacia la solución.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Métodos de integración
Discretización y backward Euler.
xk+1 − xk
= Axk+1 + Bωk+1
h
yk+1 = Cxk+1 + Dωk+1
Resolviendo para xk+1 y sustituyendo se tiene
yk+1 = C(I − hA)−1 xk + [D + hC(I − hA)−1 B]ωk+1
Resolviendo el LCP y sustituyendo,
xk+1 := (I − hA)−1 xk + h(I − hA)−1 Bωk+1
Asumiendo condiciones de pasividad para (A, B, C, D), M. Hemels
y K. Çamlibel prueban la convergencia hacia la solución.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Métodos de integración
Discretización y backward Euler.
xk+1 − xk
= Axk+1 + Bωk+1
h
yk+1 = Cxk+1 + Dωk+1
Resolviendo para xk+1 y sustituyendo se tiene
yk+1 = C(I − hA)−1 xk + [D + hC(I − hA)−1 B]ωk+1
Resolviendo el LCP y sustituyendo,
xk+1 := (I − hA)−1 xk + h(I − hA)−1 Bωk+1
Asumiendo condiciones de pasividad para (A, B, C, D), M. Hemels
y K. Çamlibel prueban la convergencia hacia la solución.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Métodos de integración
Discretización y backward Euler.
xk+1 − xk
= Axk+1 + Bωk+1
h
yk+1 = Cxk+1 + Dωk+1
Resolviendo para xk+1 y sustituyendo se tiene
yk+1 = C(I − hA)−1 xk + [D + hC(I − hA)−1 B]ωk+1
Resolviendo el LCP y sustituyendo,
xk+1 := (I − hA)−1 xk + h(I − hA)−1 Bωk+1
Asumiendo condiciones de pasividad para (A, B, C, D), M. Hemels
y K. Çamlibel prueban la convergencia hacia la solución.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Caso afín (i)
ẋ = f (x) +
k
X
gi (x)ωi
i=1
y1 = h1 (x, ω1 , . . . , ωk )
..
.
. = ..
yk = hk (x, ω1 , . . . , ωk )
0≤y⊥ω≥0
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Caso afín (ii)
En el supuesto de analiticidad de las funciones hi y bajo ciertas
condiciones específicas
grado relativo constante y uniforme, ρ,
la matriz Lgi Lρ−1
f hj (x) es una P-matriz,
las condiciones iniciales son admisibles:
(h(x0 ), . . . , Lρ−1
f h(x0 )) es lexicográficamente no negativa,
se pueden construir soluciones a futuro.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Caso afín (ii)
En el supuesto de analiticidad de las funciones hi y bajo ciertas
condiciones específicas
grado relativo constante y uniforme, ρ,
la matriz Lgi Lρ−1
f hj (x) es una P-matriz,
las condiciones iniciales son admisibles:
(h(x0 ), . . . , Lρ−1
f h(x0 )) es lexicográficamente no negativa,
se pueden construir soluciones a futuro.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Caso afín (ii)
En el supuesto de analiticidad de las funciones hi y bajo ciertas
condiciones específicas
grado relativo constante y uniforme, ρ,
la matriz Lgi Lρ−1
f hj (x) es una P-matriz,
las condiciones iniciales son admisibles:
(h(x0 ), . . . , Lρ−1
f h(x0 )) es lexicográficamente no negativa,
se pueden construir soluciones a futuro.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Caso afín (ii)
En el supuesto de analiticidad de las funciones hi y bajo ciertas
condiciones específicas
grado relativo constante y uniforme, ρ,
la matriz Lgi Lρ−1
f hj (x) es una P-matriz,
las condiciones iniciales son admisibles:
(h(x0 ), . . . , Lρ−1
f h(x0 )) es lexicográficamente no negativa,
se pueden construir soluciones a futuro.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Caso afín (ii)
En el supuesto de analiticidad de las funciones hi y bajo ciertas
condiciones específicas
grado relativo constante y uniforme, ρ,
la matriz Lgi Lρ−1
f hj (x) es una P-matriz,
las condiciones iniciales son admisibles:
(h(x0 ), . . . , Lρ−1
f h(x0 )) es lexicográficamente no negativa,
se pueden construir soluciones a futuro.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Definición, ejemplos
Sistemas lineales complementarios
Modos
El caso bimodal
Soluciones (i)
Métodos de integración
Caso general
Caso afín (ii)
En el supuesto de analiticidad de las funciones hi y bajo ciertas
condiciones específicas
grado relativo constante y uniforme, ρ,
la matriz Lgi Lρ−1
f hj (x) es una P-matriz,
las condiciones iniciales son admisibles:
(h(x0 ), . . . , Lρ−1
f h(x0 )) es lexicográficamente no negativa,
se pueden construir soluciones a futuro.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Cuestiones
Controlabilidad, alcanzabilidad y observabilidad en sistemas
complementarios.
Bifurcaciones en sistemas (lineales) complementarios.
Algoritmos de integración eficientes y precisos para sistemas de
dimensiones grandes.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Cuestiones
Controlabilidad, alcanzabilidad y observabilidad en sistemas
complementarios.
Bifurcaciones en sistemas (lineales) complementarios.
Algoritmos de integración eficientes y precisos para sistemas de
dimensiones grandes.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Cuestiones
Controlabilidad, alcanzabilidad y observabilidad en sistemas
complementarios.
Bifurcaciones en sistemas (lineales) complementarios.
Algoritmos de integración eficientes y precisos para sistemas de
dimensiones grandes.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Referencias
Hybrid Systems. Curso EE291E: Hybrid Systems. John Koo y
Shankar Sastry.
Complementarity Systems. J.M. Schumacher, M. Hemels y K.
Çamlibel.
Complementarity Systems. J.M. Schumacher, Arjan van der
Schaft.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Referencias
Hybrid Systems. Curso EE291E: Hybrid Systems. John Koo y
Shankar Sastry.
Complementarity Systems. J.M. Schumacher, M. Hemels y K.
Çamlibel.
Complementarity Systems. J.M. Schumacher, Arjan van der
Schaft.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Referencias
Hybrid Systems. Curso EE291E: Hybrid Systems. John Koo y
Shankar Sastry.
Complementarity Systems. J.M. Schumacher, M. Hemels y K.
Çamlibel.
Complementarity Systems. J.M. Schumacher, Arjan van der
Schaft.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Sistemas pasivos (i)
El sistema
ẋ = Ax + Bω
y = Cx + Dω
es pasivo si existe una función V : Rn −→ R+ tal que para
cualquier 0 ≤ t0 < t1 y para cualquier trayectoria (x, ω, y) del
sistema se verifica:
Z t1
V (x(t0 )) +
y T (τ )ω(τ )dτ ≥ V (x(t1 ))
t0
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008
Indice
Sistemas híbridos
Sistemas Complementarios
Conclusiones
Sistemas pasivos (ii)
El sistema
ẋ = Ax + Bω
y = Cx + Dω
es pasivo si existe una matriz simétrica, definida positiva P tal que
T
A P + P A P B − CT
B T P − C −D − DT
es semidefinida negativa.
E. Fossas (en colaboración con Carles Batlle)
Seminario del grupo ACES, 06/03/2008