Evaluación de técnicas basadas en conocimiento para el diseño de
Anuncio

EVALUACION DE TECNICAS BASADAS EN CONOCIMIENTO
PARA EL DISEÑO DE CONTROLES DE EXCITACION EN
SISTEMAS DE POTENCIA.
Felipe Morales, Aldo Cipriano y Hugh Rudnick
Facultad de Ingeniería, Pontificia Universidad Católica de Chile
Casilla 306, Correo 22, Santiago, Chile
Tel: 56-2-6864281; fax: 56-2-5522563; e-mail: fmoralsi@ puc.cl
Resumen: En el trabajo se comparan por simulación tres métodos de diseño de estabilizadores en sistemas de
potencia. El primer diseño se basa en reglas heurísticas, el segundo en lógica difusa y el tercero utiliza las teorías de
control H∞ y control proyectivo. Como objetivo de control se considera mejorar la estabilidad y la respuesta
dinámica de un generador conectado a una barra infinita.
Abstract: This paper compares by simulation three design methods of power systems stabilizers. The first design is
based on heuristic rules, the second on fuzzy logic and the third one uses the H∞ and projective control theories. The
control objective is to improve the stability and to enhance the dynamic response of a generator connected to an
infinite busbar.
Keywords: Estabilizadores de sistemas de potencia, sistemas basados en reglas, lógica difusa, control H∞, control
proyectivo.
1. INTRODUCCION
La complejidad creciente que han alcanzado los
sistemas eléctricos de potencia, debido al aumento de
interconexiones, al uso de nuevas tecnologías y a la
necesidad de operar el sistema económicamente, ha
llevado a crear herramientas que permiten incrementar
la seguridad, especialmente en condiciones muy
cercanas a los límites de estabilidad. La utilización de
controles suplementarios en la excitatriz de los
generadores es un medio efectivo para extender los
límites de estabilidad y mejorar la operación de
sistemas eléctricos de potencia (Anderson y Fouad,
1993; Kundur, 1994).
En las últimas dos décadas se ha desarrollado un
número considerable de técnicas para sintonizar
estabilizadores en sistemas de potencia (Power System
Stabilizers, PSS), basadas en diseños secuenciales o
coordinados. El método favorecido por la industria
consiste en la sintonización secuencial de
compensadores de adelanto o atraso de fase (Chow y
Sanchez-Gasca, 1989). Por el contrario, las técnicas de
sintonización coordinada de estabilizadores para
sistemas multimáquinas, evaluadas positivamente en
numerosas investigaciones, han tenido un impacto
práctico muy reducido. Una importante razón para ello
es la carencia de modelos suficientemente precisos. La
presencia de perturbaciones, el desconocimiento en los
parámetros del sistema, las dinámicas no modeladas o
no consideradas, la aleatoriedad de las condiciones de
operación, la variabilidad de la topología, etc.,
dificultan la utilización de técnicas que requieren de un
conocimiento preciso del modelo del sistema.
En este trabajo se analizan tres técnicas de diseño de
estabilizadores para sistemas de potencia. Dos de los
diseños se realizan utilizando técnicas basadas en
conocimiento (King y Mamdani, 1977; Hiyama, 1990;
Hassan, Malik y Hope, 1991). El primero de los
estabilizadores está compuesto por reglas heurísticas y
el segundo emplea la lógica difusa para determinar el
grado de validez de las reglas condicionales. El tercer
estabilizador en estudio posee la estructura de un
compensador análogo de dos etapas el que se sintoniza
utilizando las teorías de control óptimo en H∞ y control
proyectivo subóptimo (Morales, 1993). En todos los
casos el objetivo de control es mejorar la estabilidad y
el comportamiento de un generador conectado a una
barra infinita.
A continuación se describe el contenido del trabajo. En
la sección 2 se presenta la estructura y el modelo del
sistema de potencia en estudio. En la sección 3 se
describen los tres métodos de diseño de los
estabilizadores. En la sección 4 se presentan los
resultados obtenidos al evaluar mediante simulación no
lineal la operación del sistema de potencia con los tres
estabilizadores propuestos. Finalmente, se presenta el
análisis de los resultados obtenidos y las conclusiones
con las ventajas y desventajas de los tres métodos, en
aspectos relativos a la operación del sistema eléctrico
de potencia, simplicidad o complejidad en el diseño del
estabilizador y su implementación en tiempo real.
2.
ESTRUCTURA
POTENCIA
DEL
SISTEMA
DE
2.1 Modelo del Sistema Eléctrico de Potencia
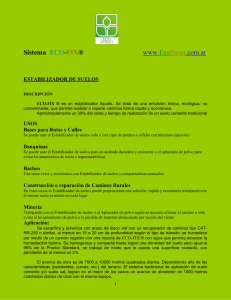
La Fig. 1 muestra el sistema eléctrico de potencia en
estudio (Morales, 1993); éste se compone de un
generador sincrónico equipado con regulador
automático de tensión, conectado a una barra infinita
por medio de una línea de transmisión.
T1
V
G1
en el eje directo; Efd es la tensión de excitación de la
máquina. El escalar u es la variable manipulada.
2.2 Estructura del Estabilizador de Sistemas de
Potencia
La Fig. 2 muestra el diagrama en bloques del sistema
de excitación, el que incluye un estabilizador cuya
entrada es la señal Y. El estabilizador modula el error
entre la tensión de referencia del generador, Vref, y la
tensión de terminales de éste, Vt.; su objetivo es
producir un torque de amortiguación en fase con la
velocidad del generador, compensando así el atraso de
fase del conjunto generador, excitación y carga. Sin
este dispositivo y en condiciones de carga elevada y/o
líneas de transmisión débiles, se generan oscilaciones
electromecánicas con una frecuencia comprendida
entre los 0,2 y 2,5 Hz. Estas oscilaciones, con factor de
amortiguación bajo o negativo, limitan severamente la
capacidad de transmisión. La reducción de la
generación para restaurar el nivel de amortiguación es
una solución viable; sin embargo, los costos asociados
a ésta pueden ser poco recomendables. Otra alternativa
consiste en la reducción de la ganancia del regulador
de tensión, pero su consecuencia es una reducción del
tiempo crítico de despeje de falla frente a
perturbaciones que afecten la estabilidad transitoria del
sistema de potencia.
V ref
+
Vt
mx
Ka
1+sTa
-
-
E fd
mn
mx
mn
3
2
L1
1
Fig. 1. Generador conectado a una barra infinita.
Para propósitos de diseñar los controles de excitación
se utiliza un modelo simplificado del sistema eléctrico
de potencia (Anderson y Fouad, 1993; Kundur, 1994),
representado por un conjunto de cuatro ecuaciones
diferenciales no lineales del tipo:
.
x = f ( x, u )
donde x(t) ∈ R4, es el vector de variables de estado
definido como:
[
x t = w δ E ,q E fd
]
U
Estabilizador
Y
Fig. 2. Diagrama en
excitación.
bloques del sistema
de
Los estabilizadores basados en conocimiento operan
con señales discretas. La señal de entrada para cada
intervalo de muestreo corresponde a la desviación
discretizada de la velocidad angular del rotor, w(k),
respecto a la velocidad sincrónica wref(k). La señal de
control, u(t), viene dada por:
u ( t ) = U(k ); kTs < t < (k + 1)Ts
donde Ts es intervalo de muestreo y k es un entero.
y w es la velocidad angular del rotor relativa a la barra
infinita; δ es el ángulo del rotor relativo a la barra
infinita; Eq' es la tensión proporcional al enlace de flujo
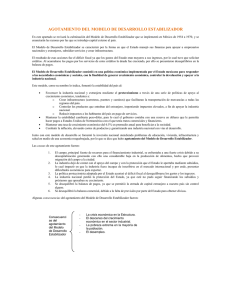
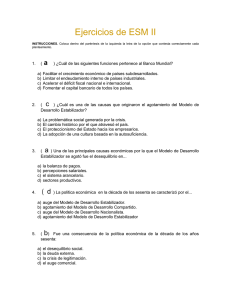
Las Figuras 3 y 4 muestran la estructura que poseen los
estabilizadores basados en heurísticas y lógica difusa
respectivamente. Estos requieren de funciones de
conversión análoga/digital y digital/análoga, y de un
microcomputador en el que se incorpora la base de
conocimiento y el motor de inferencias. Además, el
estabilizador basado en lógica difusa necesita de
interfases de fusificación y defusificación.
El valor de U se fijó en consideración al límite de
saturación de la señal de control. El valor de L se
estimó a partir del valor de la velocidad del generador
en el momento de despejar un cortocircuito trifásico en
los terminales de éste, dada por:
w tcl = w o + Pm ( t cl − t o ) / 2H
microcomputador
SISTEMA
EXPERTO
Y
A/D
con w0=0 pu, Pm=0,8 pu, tcl=0,02 seg., t0=0 seg. y
H=4,63 seg., a partir de lo cual se obtiene wtcl=0,0018
pu. Los valores de ajuste son:
U
BASE DE
CONOCIMIENTO
D/A
MOTOR DE
INFERENCIAS
U = 0.100 pu y L = 0.001 pu.
Fig. 3. Estructura del estabilizador basado en reglas
heurísticas.
U(k)
U
U/2
BASE DE
CONOCIMIENTO
Y
U
A/D
FUSIFICACION
MOTOR DE
INFERENCIAS
DEFUSIFICACION
U/4
U/8
D/A
-L
-L/2
-L/4
microcomputador
Fig. 4. Estructura del
lógica difusa.
L/8
L/4
L/2
estabilizador
basado
-U/2
en
La Figura 5 muestra la estructura de un estabilizador
clásico de sistemas de potencia, consistente en un
compensador dinámico de dos etapas que opera en
base a señales análogas. La señal de entrada al
estabilizador corresponde a las desviaciones en la
velocidad angular en pu, w/w0.
L
[w-wref](k)
-U/4
-U
Fig. 6. Representación gráfica
reglas condicionales.
del
conjunto de
3.2 Estabilizador Basado en Lógica Difusa
Y
2
(T1S +T2S +1)
K
(T3S+1)(T4S+1)
De manera similar al estabilizador basado en reglas
heurísticas, la base de conocimiento del estabilizador
difuso incluye cinco reglas que tienen la forma:
U
Fig. 5. Estructura de un estabilizador de sistemas
de potencia.
3. DISEÑO DE ESTABILIZADORES
SISTEMAS DE POTENCIA
DE
3.1 Estabilizador Basado en Heurísticas
El estabilizador basado en heurísticas consta de catorce
reglas expresadas como sentencias del tipo "Si...
entonces ...", las cuales pueden representarse
gráficamente como muestra la Figura 6. Por ejemplo, si
[w-wref](k) es menor que -L, la regla activa es:
Si [w - w ref ](k) < −L Entonces U(k) = -U
Si [w - w ref ]( k ) = A i Entonces U i ( k ) = B i
Los conjuntos difusos Ai se han definido como (ver
Fig. 7):
A1 = { [w-wref](k) < -L/2 }
A2 = { -L < [w-wref](k) < 0 }
A3 = { -L/2 < [w-wref](k) < L/2 }
A4 = { 0 < [w-wref](k) < L }
A5 = { L/2 < [w-wref](k) }
mientras que los conjuntos difusos Bi corresponden a:
B1 = { -M }
B2 = { -0.2M }
B3 = { 0 }
B4 = { 0.2M }
B5 = { M }
En este caso el parámetro L determina el universo de
discusión para la señal de entrada al estabilizador y el
parámetro M determina los límites máximo y mínimo
para la variable manipulada. La Figura 7 muestra las
funciones de pertenencia seleccionadas para la
velocidad angular del generador. La señal de control se
obtiene entonces mediante:
U ( t ) = U ( k );
kT s < t < (k + 1)T s
3
U(k) = (
3
å W ( k )) å W ( k ) U ( k )
−1
j
i
i
i =1
j= 1
donde Wi en el instante k es el grado de activación de
la regla i. Los valores de ajuste se fijaron siguiendo el
mismo criterio que en 3.1, como:
M = 0.100 pu y L = 0.001 pu.
1
-L
-L/2
L/2
L
[w-wref](k)
Fig. 7. Universo de discusión
pertenencia.
y
funciones de
3.3 Diseño del Estabilizador H∞-proyectivo
El estabilizador H∞-proyectivo se diseñó en base a las
teorías de control óptimo en H∞ y control proyectivo,
siguiendo el procedimiento descrito en (Morales,
1993).
La condición de operación elegida para la obtención
del modelo lineal, sobre el cual se basó la sintonización
de este estabilizador, corresponde a una potencia de
generación de 0,85 pu. El valor del índice de rechazo a
perturbaciones se fijó en 0,018, y la perturbación
estructurada corresponde a:
[0,013
0,000
0,074
59,222
K1=74,621;
T4=0,007.
T1=0,009;
T2=0,180;
T3=0,040;
4. EVALUACION DE LOS ESTABILIZADORES
MEDIANTE SIMULACION
El desempeño de los estabilizadores fue evaluado
mediante simulación no lineal del sistema eléctrico de
potencia. Se incluyó saturación en las señales de salida
del estabilizador y del regulador automático de tensión.
Las simulaciones no lineales fueron realizadas
mediante el uso del software de propósitos específicos
MATLABMR.
El análisis del sistema se efectuó para dos condiciones
de operación, CO1 y CO2, de las cuales CO1 fue
elegida como base para el diseño del estabilizador H∞proyectivo. En ambas condiciones el sistema se somete
a una perturbación de tipo cortocircuito trifásico de
línea a tierra en la barra terminal del transformador 1.
Se considera que el tiempo de despeje de la falla, tcl, es
0,02 seg. y que el elemento perturbado continúa en
operación. La potencia de entrada al generador en la
condición de operación 1 corresponde a 0,85 pu y en la
condición de operación 2 alcanza a 1 pu.
Las simulaciones mostradas en las Figuras 8, 9 y 10
presentan la respuesta del sistema en lazo cerrado
operando en la condición 1; para efectos de facilitar la
comparación las respuestas se han reunido por
variable. La Figura 8 presenta la respuesta en el ángulo
de torque, en la Figura 9 se muestra la tensión de
excitación y en la Figura 10 se muestra la variable
manipulada. La Figura 11 presenta la respuesta en el
ángulo de torque del sistema en lazo cerrado operando
en la condición 2. En las Figuras 8 a 11 se utiliza la
siguiente nomenclatura para denominar a los
estabilizadores:
H : Estabilizador heurístico.
D : Estabilizador difuso.
C : Estabilizador H∞-proyectivo.
LA: Sin estabilizador.
]t w d ( t )
donde wd(t) es una perturbación con energía acotada y
norma2=1; la salida regulada corresponde al ángulo de
torque del generador. La autoestructura retenida por el
control proyectivo corresponde al espectro dominante
dado como referencia por la solución al problema de
control en H∞ (3 valores propios con sus respectivos
vectores propios). El espectro final de valores propios
(Λ) del modelo lineal en lazo cerrado es:
Λ = [-156,3; -7,6+3,5j; -7,6-3,5j; -11.0; -8,9+0,7j; -8,9
-0,7j]
Los valores de ajuste para el estabilizador son:
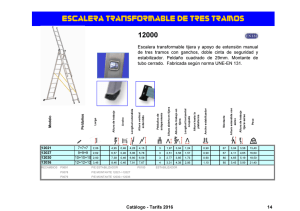
Fig. 8. Simulación no lineal del sistema máquina
barra infinita operando en la condición 1.
amplitud se eliminan con el estabilizador heurístico en
aproximadamente 12 segundos, mientras que con el
estabilizador difuso ésto ocurre ya a los 5 seg. El
estabilizador H∞-proyectivo, por su parte, presenta una
superioridad
considerable
en
términos
de
amortiguación.
Fig. 9. Simulación no lineal del sistema máquina
barra infinita operando en la condición 1.
Al observar la Figura 9 se aprecia que en el caso de los
estabilizadores basados en conocimiento, la tensión de
excitación experimenta una fuerte variación en los dos
primeros ciclos de saturación. Una variación similar se
observa en la señal de control (Fig. 10); éstas se
reducen considerablemente cuando se utiliza el
estabilizador H∞-proyectivo.
La robustez de los esquemas propuestos se observa al
analizar la repuesta del sistema en dos condiciones de
operación (Figuras 8 y 11). La respuesta, en términos
de amortiguación, es similar para las dos condiciones
de operación. Esta característica es más notoria en los
controladores basados en conocimiento, permitiendo
concluir que no se requiere la resintonización de los
parámetros libres de diseño al variar la condición de
operación del sistema de potencia.
Fig. 10. Simulación no lineal del sistema máquina
barra infinita operando en la condición 1.
Al observar las Figuras 8 y 11 se observa que cuando
el sistema de potencia opera con los estabilizadores
basados en conocimiento, el ángulo del rotor presenta
una considerable disminución en el valor máximo que
alcanza. Esta característica permite concluir que
aumentó el torque de sincronización de la máquina, y
por ende, el tiempo límite de despeje de fallas. Esta
característica se presenta más débilmente con el
estabilizador H∞-proyectivo.
De los resultados de simulación se concluye una
evidente superioridad del estabilizador H∞-proyectivo,
la que puede asociarse a que en su diseño se hace uso
del modelo del sistema eléctrico de potencia. Sin
embargo, en casos de gran incertidumbre en el modelo,
el diseño del estabilizador H∞-proyectivo se dificulta
enormemente. Por otro lado, las dos etapas en este
estabilizador
incrementan
enormemente
su
potencialidad, lo que es congruente con la teoría de
control óptimo y con las respuestas que se han
observado (Figuras 8 y 11).
Fig. 11. Simulación no lineal del sistema máquina
barra infinita operando en la condición 2.
ANALISIS Y CONCLUSIONES
Al analizar las Figuras 8 y 11 se observa que el ángulo
del rotor presenta un considerable y satisfactorio
aumento de la amortiguación cuando se utilizan los
estabilizadores heurísticos y difusos, en relación a la
operación sin estabilizador. En ambos casos, al
observar las respuestas en un intervalo mayor de
tiempo, se destaca que las oscilaciones de baja
La implementación en tiempo real de estabilizadores
basados en conocimiento requiere de un
microcomputador con funciones de conversión
análoga/digital y digital/análoga, pero no necesita
algoritmos de control más complejos, lo que es
ventajoso en sistemas de control en tiempo real.
La resultados presentados en este trabajo abren
interesantes perspectivas para iniciar investigaciones
destinadas a estudiar la aplicación de estabilizadores
difusos, y sus métodos de sintonía, a sistemas eléctricos
de potencia multimáquinas.
REFERENCIAS.
Anderson, P., Fouad, A. (1993). Power System Control
and Stability, IEEE Press, New York.
Chow, J., Sanchez-Gasca, J. (1989). Pole Placement
Designs of Power System Stabilizers, IEEE
Trans. on Power Systems, Vol. 4, Nº1, pp.
271-277.
Hassan, M., Malik, O., Hope, G. (1991). A Fuzzy
Logic Stabilizer for a Synchronous Machine,
IEEE Trans. on Energy Conversion, Vol. 6,
Nº3, pp. 407-413.
Hiyama, T. (1990). Rule-Based Stabilizer for MultiMachine Power System, IEEE Trans. on
Power Systems, Vol. 5, Nº2, pp. 403-409.
King, P., Mamdani, E. (1977). The Application of
Fuzzy Control Systems to Industrial
Processes, Automatica, Vol. 13, pp. 235-242.
Kundur, P. (1994). Power System Stability and
Control, McGraw-Hill, Inc.
Matlab (1987). Control Toolbox de Matlab, The
Mathworks, Versión 3.13.
Morales, F. (1993). Proyecto de ESP Descentralizados
con Espectro de referencia Robusto,
Proyecto de Título Ing. Civil Eléctrico,
Universidad Católica de Valparaíso, Chile.
AGRADECIMIENTOS
Los autores agradecen el apoyo otorgado por el
proyecto FONDECYT 1960394.