Simulador Convertidores DC-DC - deeea
Anuncio

Dept d'Eng. Electrònica, Elèctrica, i Automàtica (DEEEA)
Escola Tècnica Superior d'Enginyeria (ETSE)
Universitat Rovira i Virgili (URV)
Proyecto Final de Carrera
Simulador Convertidores DC-DC
AUTOR: Víctor Galera Ortega
DIRECTOR: Abdelali El Aroudi
FECHA: Junio-2002
SIMSCP - Simulador Convertidores Dc-Dc
ÍNDICE
E.T.S.E : ELECTRÓNICA INDUSTRIAL
PÁG.
1.- Introducción .................................................................................................................. 6
2.- Objetivos del Proyecto ................................................................................................ 10
3.- Bases Teóricas ............................................................................................................. 12
3.1.- Introducción ......................................................................................................... 12
3.2.- Convertidores DC-DC.......................................................................................... 14
3.2.1.- Modos de conducción...................................................................................... 15
3.2.2.- Ciclo de trabajo. .............................................................................................. 16
4.- Estudio de los Convertidores utilizados por el Simulador....................................... 18
4.1.- Convertidor Buck (Reductor) ............................................................................. 18
4.1.1.- Funcionamiento Básico del convertidor Buck................................................. 18
4.1.1.1 Modo de conducción continua (MCC)........................................................ 19
4.1.1.2 Modo de conducción discontinua (MCD)................................................... 21
4.2.- Convertidor Boost (Elevador) ............................................................................. 23
4.2.1.- Funcionamiento Básico del convertidor Boost................................................ 24
4.2.1.1 Modo de conducción continua (MCC)........................................................ 24
4.2.1.2 Modo de conducción discontinua (MCD)................................................... 27
4.3.- Convertidor Buck-Boost (Reductor-Elevador).................................................. 28
4.3.1.- Funcionamiento Básico del convertidor Buck-Boost ...................................... 29
4.3.1.1 Modo de conducción continua (MCC)........................................................ 30
4.3.1.2 Modo de conducción discontinua (MCD)................................................... 31
4.4.- Convertidor Cuk .................................................................................................. 33
4.4.1.- Funcionamiento Básico del convertidor Cúk .................................................. 34
4.4.1.1 Modo de conducción continua (MCC)........................................................ 34
4.4.1.2 Modo de conducción discontinua (MCD)................................................... 36
4.5.- Convertidor SEPIC .............................................................................................. 38
4.5.1.- Funcionamiento Básico del convertidor SEPIC .............................................. 39
4.5.1.1 Modo de conducción continua (MCC)........................................................ 40
4.5.1.2 Modo de conducción discontinua (MCD)................................................... 42
2
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
4.6.- Convertidor Buck con Filtro de Entrada ........................................................... 44
4.6.1.- Funcionamiento Básico del convertidor Buck con Filtro de Entrada .............. 44
4.6.1.1 Modo de conducción continua (MCC)........................................................ 45
4.6.1.2 Modo de conducción discontinua (MCD)................................................... 47
4.7.- Convertidor Boost con Filtro de Salida .............................................................. 48
4.7.1.- Funcionamiento Básico del convertidor Boost con Filtro de Salida................ 49
4.7.1.1 Modo de conducción continua (MCC)........................................................ 53
4.7.1.2 Modo de conducción discontinua (MCD)................................................... 51
5.- Lazo de control ............................................................................................................ 54
5.1.- Lazo abierto .......................................................................................................... 54
5.2.- Lazo cerrado ......................................................................................................... 56
5.2.1.- Sistema de control a frecuencia fija................................................................. 58
5.2.1.1 Sistema de Control PWM por muestra de Tensión ..................................... 59
5.2.1.2 Sistema de Control PWM por muestra de Corriente .................................. 60
5.2.1.3 Sistema de Control PWM por muestra combinada Tensión-Corriente....... 62
5.2.1.4 Histéresis .................................................................................................... 63
6.- Solución de las Ecuaciones Diferenciales de los Convertidores............................... 65
6.1.- Las Matrices de los Convertidores...................................................................... 66
6.1.1.- Matrices del convertidor Buck ........................................................................ 66
6.1.2.- Matrices del convertidor Boost ....................................................................... 67
6.1.3.- Matrices del convertidor Buck- Boost............................................................. 68
6.1.4.- Matrices del convertidor Cúk .......................................................................... 69
6.1.5.- Matrices del convertidor SEPIC ...................................................................... 70
6.1.6.- Matrices del convertidor Buck con filtro de entrada ....................................... 71
6.1.7.- Matrices del convertidor Boost con filtro de salida......................................... 72
6.2.- Algoritmo de cálculo ............................................................................................ 73
7.- El Simulador SIMSCP ................................................................................................ 76
7.1.- Descripción General............................................................................................. 76
3
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
7.2.- Menú Principal ..................................................................................................... 76
7.3.- Pantalla de configuración .................................................................................... 78
7.3.1.- Ajuste de parámetros ....................................................................................... 81
7.3.1.1 Componentes .............................................................................................. 81
7.3.1.2 Condiciones iniciales (CI) .......................................................................... 82
7.3.1.3 Consignas ................................................................................................... 82
7.3.1.4 Muestras, ciclos y constantes...................................................................... 83
7.3.2.- Lógica de Control............................................................................................ 85
7.3.3.- Modos de operación MCC/MCD .................................................................... 88
7.3.4.- Biestables (Latch)............................................................................................ 91
7.3.4.1 Evitar Multiconmutaciones......................................................................... 92
7.3.4.2 Forzado....................................................................................................... 94
7.3.5.- La Perturbación ............................................................................................... 99
7.3.6.- Tensión de Entrada........................................................................................ 101
7.3.7.- Estabilizadores .............................................................................................. 103
7.3.7.1 TDAS (Time-Delay Auto Synchronization) ............................................... 104
7.3.7.2 Estabilización de la dinámica cambiando la amplitud de Rampa ciclo a
ciclo .......................................................................................................... 108
7.4.- Pantalla de representación ................................................................................ 110
7.4.1.- Representación de Variables ......................................................................... 116
7.4.2.- Plano/Espacio de Estados.............................................................................. 117
7.4.2.1 Curva Característica ................................................................................ 121
7.4.2.2 Banda de regulación................................................................................. 130
7.4.3.- Sección de Poincaré ...................................................................................... 137
7.4.4.- Diagrama de Bifurcación............................................................................... 142
7.4.5.- Creación de ficheros .mat .............................................................................. 146
7.4.6.- El Informe ..................................................................................................... 148
8.- Simulaciones .............................................................................................................. 158
8.1.- La dinámica en modo deslizante “Sliding”....................................................... 150
8.2.- Control con Histéresis ........................................................................................ 152
8.3.- Corrector Factor de Potencia ............................................................................ 157
4
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
9.- Conclusiones .............................................................................................................. 160
10.- Bibliografía .............................................................................................................. 162
11.- Anexos ...................................................................................................................... 165
11.1.- Algoritmo de cálculo. Simuladorr.m................................................................ 165
5
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
1.- Introducción
El comportamiento caótico ocurre naturalmente en sistemas dinámicos no lineales. El
caos se ha vuelto un sujeto de moda en muchas actividades marcadas de la ciencia no lineal
durante las últimas décadas. Esta atrayendo no sólo a científicos en diferentes, relevantes y
relacionados campos de la ciencia sino también a filósofos y escritores. Los primeros
esfuerzos para investigar este comportamiento son debidos al matemático francés Henri
Poincaré cuando estudiaba la atracción gravitacional entre planetas y estrellas.
El primer circuito electrónico en el cual se ha detectado el caos es el denominado
oscilador de Van Der Pol. Años más tarde, el bien conocido ahora circuito de Chua, ha
sido y es un sujeto de muchos trabajos científicos. Durante mucho tiempo, el caos se
consideraba más como un accidente (mal diseño) que como un comportamiento natural y
una dinámica posible. Lo que ha hecho que los ingenieros han venido haciendo con el
caos, hasta hace muy poco, una sola cosa: simplemente, evitar que ocurra.
Recientemente, matemáticos, físicos e ingenieros han dedicado muchos esfuerzos al
análisis y la caracterización del caos en numerosos sistemas de diferentes ramas de la
ciencia como puede ser la dinámica de los fluidos, reacciones químicas, dinámica de los
láseres, comunicaciones y circuitos electrónicos.
Hasta hace poco, se ha demostrado que el caos es manejable, que cabe sacarle
provecho, y que, incluso, es de valor incomparable. De hecho ya se ha aplicado para
aumentar la potencia de los láseres, para sincronizar la salida de los circuitos electrónicos,
para controlar las oscilaciones en las reacciones químicas, para estabilizar el errático latir
de corazón de los animales enfermos y para codificar los mensajes electrónicos y
garantizar el secreto de las comunicaciones.
Delante los resultados obtenidos hasta ahora y la cantidad de esfuerzos dedicados a la
investigación del comportamiento caótico, nos podemos convencer, entonces, que en un
futuro próximo, los ingenieros ya no rehuirán del caos, sino, que lo adoptarán.
6
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
La dinámica caótica en la electrónica de potencia se empezó a estudiar cuando unos
autores de la universidad de Surrey (Reino Unido) publicaron un articulo en el cual
destacan la posibilidad de la dinámica caótica en un convertidor de tipo Buck (reductor)
[Hamill et al., 1992] [1].
Para aumentar la eficiencia y reducir el peso, el tamaño y el coste de los sistemas
electrónicos de potencia, los convertidores continua-continua (DC-DC) son unos de los
circuitos más utilizados. Básicamente, se usan en todas las situaciones donde hay una
necesidad de mantener una tensión a un nivel deseado. La realización de estos circuitos es
mediante una apropiada acción de conmutación entre dos topologías diferentes que
usualmente se lleva a cabo mediante modulación de anchura de pulsos PWM o bien
mediante el control de estructura variable denominado, a veces, control en modo de
deslizamiento (Sliding mode control) [Venkataramanan et al., 1985] [2]. La diferencia
entre la filosofía de los dos métodos es que el primero esta basado en técnicas de
promediación y modelado en dominio de la frecuencia, mientras que el segundo esta
basado sobre técnicas del dominio de tiempo.
La conmutación forzada por la naturaleza del control de estos convertidores hace que
la combinación de la planta con el sistema de control sea altamente no lineal y
consecuentemente, estos reguladores pueden producir fenómenos no lineales como el
comportamiento caótico. En la mayoría de los trabajos sobre el diseño y el estudio del
comportamiento de estos circuitos, que entran en una clase amplia de sistemas llamados
sistemas de estructura variable VSS, esta basado en la linealización del modelo
promediado en el caso PWM o bien en la utilización del método del control equivalente en
el caso del control en modo de deslizamiento. Un tal proceder, no puede predecir las
posibles dinámicas no lineales que pueden ocurrir en los reguladores DCDC.
Esta limitación ha llevado a que algunos investigadores a que no adopten estas
técnicas de promediación ni las del control equivalente. Actualmente no se conoce la
relación entre el tipo de dinámica de los convertidores y los valores de los parámetros,
excepto en el caso de altas frecuencias cuando se puede emplear el modelo de promediado.
Y aun en el caso de altas frecuencias, los convertidores pueden entrar en dinámica
cuasiperiódica o caotica para ciertos valores de los parámetros.
7
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
La caracterización bifurcacional de los convertidores DC-DC daría un mapa del
comportamiento de los convertidores que permitirá a los ingenieros de diseño de
convertidores DC-DC conocer que parámetros utilizar para obtener una cierta dinámica. En
concreto, esta caracterización permitiría conocer qué parámetros usar para obtener un caos
robusto, dinámica que permitiría abordar la disminución del ruido EMI.
El estudio de estos sistemas mediante modelos continuos lineales a tramos o mediante
modelos discretos es conveniente para conservar las propiedades del sistema y por lo tanto
predecir los posibles fenómenos que pueden ocurrir. Recientemente se ha confirmado
mediante montajes experimentales que circuitos que se pueden cualificar de ‘muy
sencillos’ son capaces de manifestar una plétora de dinámicas complicadas.
Estas dinámicas no hubieran sido explicadas si se hubiera considerado el modelo
linealizado de estos sistemas ya que es difícil si no es imposible, conservar las propiedades
intrínsecas no lineales del sistema (discontinuidades en el modelo, conmutaciones)
responsables a cualquier fenómeno no lineal. Actualmente, cada vez es más claro que las
discontinuidades en estos sistemas no puede ser ignoradas y que son esenciales para
entender los orígenes del complicado comportamiento que pueden manifestar.
Estas consideraciones pueden jugar un papel importante en el desarrollo de nuevas
herramientas analíticas que a su vez permitirán un mejor entendimiento de las
bifurcaciones y el caos en sistemas dinámicos conmutados tal como son los convertidores
electrónicos de potencia. Años más tarde, varios artículos publicados en diferentes revistas
analizan la dinámica no lineal y las posibles vías por las cuales un convertidor se puede
llevar a trabajar en el régimen caótico [Barnerjee et al., 1999] [3].
Muy recientemente, se ha mostrado mediante simulación y experimentación que estos
sistemas tanto si están controlados por modulación de anchura de pulsos, como cuando
están controlados en modo de deslizamiento, son capaces de manifestar bifurcaciones y
caos [El Aroudi et al., 1999] [4], [El Aroudi et al., 2000] [5].
8
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
En esta línea de trabajo, se han descubierto la ruta hacia el caos por doblamiento de
periodos, por vía de la cuasi-periodicidad [El Aroudi et al., 1999] [4], [El Aroudi et al.,
2000] [5], y la dinámica caótica debida a una bifurcación típica de los sistemas
conmutados como son los convertidores DC-DC. Se espera que un entendimiento detallado
de la naturaleza de los fenómenos descritos anteriormente llevará a un progreso adicional
en diferentes áreas de ingeniería. En particular, la electrónica de potencia es un posible
campo de aplicación.
El análisis y la clasificación de estas bifurcaciones es el sujeto de muchas
investigaciones en curso. En todas las vías hacía el caos citadas anteriormente, se ha
observado que cuando el convertidor alcanza el régimen caótico, el espectro de la tensión
de salida se ve modificado respecto a cuando el convertidor trabaja en régimen periódico.
En realidad, eran estas modificaciones espectrales asociadas al régimen caótico que
han proporcionado a diferentes investigadores una motivación importante para estudiarlo.
Por naturaleza los convertidores DC-DC trabajan en un permanente régimen transitorio,
conmutando corrientes entre diversas ramas del sistema y dando lugar a la generación de
armónicos, sobretensiones, picos de corriente. Lo cual hace que su espectro sea una
superposición de picos a los armónicos de la frecuencia de trabajo, y que la energía de su
espectro esté concentrada a esas frecuencias.
9
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
2.- Objetivos del Proyecto
El objetivo principal de este Proyecto es, aportar una herramienta de trabajo en la
Simulación de Convertidores DC-DC, en un entorno de trabajo interactivo entre el usuario
y el programa.
Se pretende crear un programa bajo el entorno MATLAB V6.0, en el cual el usuario pueda
Simular el comportamiento de uno de los siguientes Convertidores:
•
Buck (reductor)
•
Boost (elevador)
•
Buck-Boost (reductor-elevador)
•
Cúk
•
SEPIC
•
Buck con Filtro de Entrada
•
Boost con Filtro de Salida.
Este Simulador engloba el Convertidor DC-DC seleccionado, junto con un lazo de
control, permitiendo al usuario la modificación de cualquier parámetro. Haciendo uso del
ajuste de los parámetros se pueden implementar diferentes controles, como puede ser el
control PWM, control con Histéresis, control de Corriente máxima,... También incluye una
sección donde se permite ajustar la precisión y duración de la simulación.
Para todos los convertidores se dispone de la posibilidad de simular los dos modos de
funcionamiento posible: “Modo conducción continua” (MCC) y “Modo conducción
discontinua” (MCD), resolviendo directamente las ecuaciones que describen al sistema.
Por otro lado, unas de las opciones más importantes que presenta el Simulador es la
capacidad de representación. Permite seleccionar entre cuatro pantallas de representación
según sea la necesidad del usuario. En cada una de ellas se tiene la posibilidad de
representar cualquier variable en el dominio del tiempo y su correspondiente FFT.
10
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
También permite la representación del Plano/Espacio de estados, la sección de
Poincaré y el Diagrama de Bifurcación.
En este proyecto también se permite simular la actuación de los siguientes
estabilizadores: Estabilizador de la dinámica cambiando la Amplitud de Rampa ciclo a
ciclo y el TDAS (Time Delay AutoSynchronization). En los cuales se pueda seleccionar el
periodo de activación y ajustar sus parámetros correspondientes.
Para poder simular un comportamiento bastante completo del Convertidor DC-DC,
junto con su lazo de control, el Simulador tiene en cuenta la introducción de una
perturbación dentro de una simulación determinada. La perturbación será de tipo escalón,
que puede ser aplicable a cualquier parámetro, indicando el periodo de actuación y el
nuevo valor a adoptar.
El Simulador permite obtener un informe con todos los datos pertenecientes a una
simulación realizada, pudiendo ser visualizado en pantalla o enviado a imprimir. Por otro
lado presenta la oportunidad de crear un fichero.mat donde se almacenan los datos
suficientes para poder realizar nuevamente dicha simulación. Esta última característica es
especialmente útil cuando interesa recuperar simulaciones realizadas con anterioridad.
La finalidad de este Simulador es que sirva de herramienta y de ayuda, para introducir
de forma didáctica al estudiante e investigador en el mundo de los Convertidores DC-DC,
y en particular en el mundo de los sistemas conmutados en general.
11
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
3.- Bases Teóricas
3.1.- Introducción
Una de las partes más importantes de la electrónica es la denominada electrónica de
potencia, que estudia la conversión y control de la energía eléctrica y sus aplicaciones
tratando de maximizar el rendimiento, o lo que es lo mismo, minimizar la disipación de
energía.
En la década de los 80 se pasó del concepto de conversión y control en general de la
energía eléctrica al concepto de modulación del flujo de energía utilizando convertidores
conmutados, dotados de elementos conmutadores estáticos del tipo semiconductores de
potencia. Los cuales tienen la capacidad de trabajar a frecuencias de conmutación elevadas
y soportar potencias relativamente elevadas. Así que los convertidores de energía eléctrica
que se estudian en el ámbito de la electrónica de potencia se denominan convertidores
estáticos.
Dentro de los convertidores estáticos se pueden encontrar diferentes clases, según el
tipo de energía que convierta. Dependiendo de la conversión que realiza, el circuito recibe
un nombre determinado:
-
Cicloconvertidor: es el convertidor que proporciona una corriente alterna a
partir de otra corriente alterna (Convertidor AC-AC).
-
Rectificador: convierte una tensión alterna en una tensión continua (Convertidor
AC-DC). Primeramente se rectifica la señal y luego se filtra. Para obtener la
señal continua a la salida, se hará pasar la señal por el regulador.
-
Ondulador: suministra una tensión alterna a partir de una tensión continua
(Convertidor DC-AC). En primer lugar se troceará la señal, para después
obtener su valor medio mediante un condensador. Para obtener la señal
senoidal, se coloca a la salida un convertidor resonante.
12
SIMSCP - Simulador Convertidores Dc-Dc
-
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Troceador o Chopper: convierte una determinada tensión continua en otra
tensión continua con bajo rizado (Convertidor DC-DC).
Cada uno de estos tipos presenta una gran amalgama de topologías, cada una de ellas
diseñada para obedecer a unas especificaciones concretas.
El principio de funcionamiento será el mismo para todos los convertidores
conmutados, es el principio de almacenamiento y transferencia de energía en ciclos de
conmutación. Durante el primer intervalo del ciclo de trabajo, el convertidor almacena la
energía en la bobina, transfiriendo en el segundo intervalo de trabajo esta energía al
condensador. El control gobierna los estados de conducción y de bloqueo de los
conmutadores.
Con el objetivo de convertir energía eléctrica con la máxima eficiencia, los
convertidores de potencia ideales poseen únicamente elementos que no presentan pérdidas,
es decir, que no absorben potencia. Se pueden aproximar dos grupos básicos de
componentes reales que presentan pérdidas mínimas:
-
Componentes reactivos: Son los elementos que almacenan energía, como los
condensadores y bobinas. Estos componentes absorben energía del circuito, la
almacenan y finalmente la devuelven al circuito.
-
Componentes conmutadores: Son dispositivos que se comportan idealmente
como interruptores, es decir, sin pérdidas de conmutación; en estado de
conmutación (‘ON’) presentan una tensión en bornes nula (v=0), y en estado de
corte (‘OFF’) tienen una corriente de paso nula (i=0). De esta manera el
producto V·i será siempre cero y no disiparan potencia. Otro punto importante
para que los interruptores conmutados disipen la menor potencia posible, es
procurar que los tiempos de conmutación sean muy pequeños, es decir que la
conmutación sea lo más rápida posible para evitar estar mucho tiempo en la
zona lineal.
13
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
3.2.- Convertidores DC-DC
Los convertidores DC-DC son circuitos que controlan la carga y descarga de energía
en sus elementos pasivos almacenadores de energía, es decir, condensadores y bobinas,
consiguiendo un cambio en el nivel de una tensión continua; quedando el flujo de energía
determinado por el uso y control de elementos conmutadores.
Otra manera de describir estos convertidores sería definir estos circuitos como
troceadores (Choppers) de la señal continua que proviene de la entrada utilizando para ello
elementos conmutadores y haciendo pasar la señal troceada por un filtro pasabajos,
realizado con elementos almacenadores de energía, y obteniendo otra tensión de salida
continua. Por lo que la conversión DC-DC significa la obtención de una tensión continua
con unas características determinadas a partir de otro nivel de tensión que no las posee.
Dentro de los convertidores DC-DC se pueden encontrar varios tipos. Una primera
división de los diferentes tipos se encuentra, como en los interruptores conmutadores,
desde el punto de vista del numero de cuadrantes en que se puede actuar el convertidor, es
decir, si existe o no la posibilidad de obtener un flujo de potencia bidireccional.
Así pues, existen sistemas unidireccionales, denominados también convertidores de un
cuadrante, y sistemas reversibles, subdividiendo éstos últimos en convertidores de dos
cuadrantes y de cuatro cuadrantes. Se utilizará el tipo que proceda dependiendo de las
características de la aplicación con que se trabaje, generalmente según el tipo de carga que
alimente el convertidor DC-DC. Por otro lado, los que solamente admiten funcionamiento
en un cuadrante se pueden subdividir en las denominadas tres configuraciones básicas y el
chopper de acumulación capacitiva, también conocido como convertidor Cuk.
Las tres configuraciones básicas son: Convertidor Buck (o reductor), Convertidor
Boost (o elevador) y Convertidor Buck-Boost (ó elevador-reductor), los cuales son
objetivos de este proyecto junto al Cúk, SEPIC, Buck con filtro de Entrada y Boost con
filtro de Salida.
14
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
A parte de estos convertidores DC-DC existen otros tipos, como los convertidores con
aislamiento galvánico o convertidores resonantes.
Como ya se mencionó anteriormente, el principio de funcionamiento es el mismo para
todos ellos, y se trata del principio de almacenamiento y transferencia de energía en ciclos
de conmutación.
Las variables de estados para los convertidores serán las tensiones en los
condensadores y las corrientes en los inductores. También se incluye como variable de
estado, la diferencia existente entre la tensión de salida y la tensión deseada (siendo
contemplada como variable del error), cuando el controlador incluye un término integral.
3.2.1.- Modos de conducción
Todos los convertidores pueden presentar dos modos de conducción, los cuales se
deben a la relación entre el tiempo en el que el conmutador se encuentra cerrado, y el
tiempo necesario para que la bobina descargue totalmente la energía almacenada
previamente [11]. Los modos de conducción posibles son:
-
Modo de conducción continua (MCC): La intensidad que fluye por la carga
fluctúa entre unos valores máximo y mínimo, pero nunca llega a anularse. Esto
se debe a que el conmutador deberá estar bloqueado un intervalo de tiempo que
permita a la intensidad en la carga no hacerse cero. De este modo, al comenzar
el siguiente periodo la intensidad podrá partir de un valor inicial, I L ( MIN ) .
-
Modo de conducción discontinua (MCD): La intensidad en la carga se hace nula
en un momento determinado a lo largo de un intervalo de tiempo Toff durante
el cual el interruptor esta abierto. El tiempo que permanece abierto el
interruptor es mayor que el tiempo que puede estar la bobina cediendo energía,
con lo que al iniciarse el siguiente periodo la intensidad en la carga partirá de
cero.
15
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
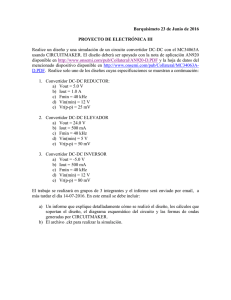
Ambos modos de operación quedan reflejados en la figura 1, para el caso de un
chopper reductor.
Fig. 1. Intensidad en la bobina para un chopper reductor para modos
de conducción MCC y MCD.
3.2.2.- Ciclo de trabajo.
El interruptor se abre y se cierra siguiendo una señal de periodo “T”. El tiempo
durante el cual el interruptor esta cerrado, se denominará tiempo de conducción, “ TON ”.
Por otro lado el tiempo que el interruptor permanece abierto, se llamara tiempo de bloqueo,
“ TOFF ”. La suma de TON y TOFF forman el periodo del convertidor (T).
En un convertidor la potencia entregada a la carga esta en función de δ , cociente entre
TON y T. Pues bien, a dicho cociente se le denomina “ciclo de trabajo”. Y se define como
la fracción del periodo del convertidor en el cual el interruptor se halla cerrado.
δ =
TON
(1)
T
16
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Observando la expresión anterior (1) se puede deducir que se presentan tres formas
diferentes de modificar el ciclo de trabajo, y por tanto la tensión de salida.
-
Variando el tiempo de conducción TON , al mismo tiempo que se mantiene T
fijo. Llamado también Modulación por Ancho de Pulso (PWM) ya que la
frecuencia de la señal del convertidor se mantiene constante mientras que no
ocurre así con la anchura del pulso que define el tiempo de conducción del
convertidor.
-
Variando T y conservando TON constante. Denominado Modulación de
Frecuencia ya que es la frecuencia del convertidor la que varia. El
inconveniente mas destacado de este método de control se encuentra en la
generación indeseada de armónicos a frecuencias impredecibles, por lo que el
diseño del consiguiente filtro se revestirá de una complejidad en algunos casos
excesiva.
-
Modificando ambos, el tiempo de conducción TON y T.
A continuación se centrará en el funcionamiento y comportamiento de los
convertidores DC-DC a que hacen referencia este proyecto.
17
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
4.- Estudio de los Convertidores utilizados por el Simulador
4.1.- Convertidor Buck (Reductor)
El convertidor Buck, es un tipo de convertidor conmutado DC-DC también conocido
por el nombre de convertidor reductor (Step-Down) [7],[8]. La función de este convertidor
es mantener una tensión de salida inferior a la de entrada regulada frente a variaciones de
la tensión de entrada o de la carga.
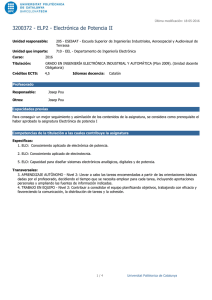
En la figura 2, se muestra el esquema del convertidor Buck. En el modelo del
convertidor utilizado en este proyecto se han incluido tanto la resistencia serie de la
bobina, como la resistencia serie del condensador.
Este convertidor forma parte de la familia de los convertidores de segundo orden, ya
que en el se encuentran dos elementos almacenadores de energía. Se muestra el circuito del
convertidor en lazo abierto para realizar un estudio detallado de su funcionamiento y
definición de las variables de estados.
Fig. 2. Esquema de un convertidor DC-DC tipo Buck (reductor)
4.1.1.- Funcionamiento Básico del convertidor Buck
En un regulador reductor, el voltaje promedio de salida Vo , es menor que el voltaje de
entrada Vin , de ahí la palabra “reductor”.
18
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
El interruptor S conmuta a una frecuencia de conmutación f=1/T. Se distingue dos
modos de operación según si la corriente por el inductor L se anula durante el periodo de
operación T o si por el contrario se mantiene a un valor de corriente I L ( MIN ) .
Seguidamente se describen los modos de conducción, y en cada uno de ellos se
observarán sus topologías y se obtendrán las ecuaciones características del sistema, que
expresadas en forma matricial serán las utilizadas por el Simulador del proyecto.
4.1.1.1 Modo de conducción continua (MCC)
En este modo de funcionamiento la intensidad que fluye por el inductor fluctúa entre
unos valores máximo y mínimo, pero nunca llega a anularse. Esto, como se verá más
adelante, se debe a la relación entre el tiempo en el que el interruptor se encuentra cerrado,
y el tiempo necesario para que la bobina descargue totalmente la energía almacenada
previamente.
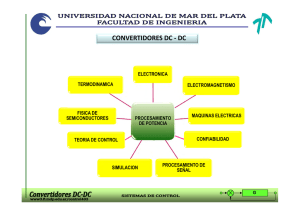
En t=0 comienza a conducir el interruptor S (primera topología), el circuito
equivalente de esta topología esta representado en la figura 3. Como la tensión de salida Vo
es menor que la tensión de entrada Vin, la corriente por inductor L será creciente durante
este intervalo. La corriente que circula por el interruptor es igual a la de L.
Fig. 3. Convertidor Buck durante “topología ON”, intervalo 0 < t < TON
Durante el intervalo de tiempo en que el interruptor se halla en conducción, es decir
“ON”, y el diodo se halla en corte, “OFF”, se dice que el convertidor se encuentra en la
“topología ON”.
19
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Esta topología se cumplirá durante el intervalo 0 < t < δT , donde δ es el ciclo de
trabajo (duty cycle). De ahí que dicho intervalo sea conocido como el “intervalo TON ”, es
decir 0 < t < TON .
Durante la “topología ON” se verifican las siguientes expresiones:
dVC
R
1
·i L
·VC +
= −
dt
(R + RC )·C
(R + RC )·C
R·RC i L Vin
di L
R
· +
·VC − RSL +
= −
dt
L
R + RC L
(R + RC )·L
(2)
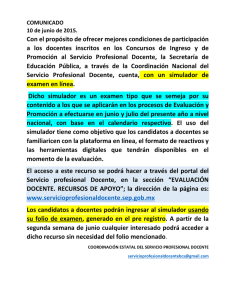
Un tiempo δT después se desconecta el interruptor S (segunda topología). Se genera
entonces una sobretensión que hace conducir al diodo D (diodo de marcha libre)
manteniendo así la continuidad de la corriente por L. El nuevo circuito esta representado en
la figura 4. La corriente por el inductor es ahora decreciente, por lo que se abate hasta que
en el siguiente ciclo el interruptor se vuelve a activar.
Fig. 4. Convertidor Buck durante “topología OFF”, intervalo TOFF < t < T .
Durante el intervalo de tiempo en que el interruptor se halla desconectado, es decir
“OFF”, y el diodo de marcha libre se halla en conducción, “ON”, se dice que el
convertidor se encuentra en la “topología OFF”. Esta topología se cumplirá durante el
intervalo, δT < t < T . Por lo que dicho intervalo es conocido como el “intervalo TOFF ”, es
decir, TON < t < T .
20
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Durante la “topología OFF” se verifican las siguientes expresiones:
dVC
R
1
·i L
·VC +
= −
dt
(R + RC )·C
(R + RC )·C
di L
R·RC i L
R
·
·VC − RSL +
= −
dt
R + RC L
(R + RC )·L
(3)
El modo de conducción continua se asocia al hecho de que el interruptor y el diodo
nunca estarán en bloqueo a la vez.
De este modo se puede decir que: T = TON + TOFF
Será la ley de control la que determinará la duración de los subintervalos de
conmutación a partir de las variables de estado del convertidor y de las posibles variables
de estado del subsistema de control.
4.1.1.2 Modo de conducción discontinua (MCD)
El modo de conducción discontinua presenta tres topologías. Las dos primeras son
iguales a las topologías presentadas para el modo de conducción continua, y la tercera se
define cuando los dos elementos conmutadores diodo de marcha libre e interruptor, están
bloqueados (OFF) a la vez.
La tercera topología se debe a que la bobina tiene tiempo suficiente para descargar la
energía almacenada.
Supondremos que la corriente se anula a partir de algún instante del intervalo
TON < t < T , hasta t=T. En t=0 comienza a conducir el interruptor S, el circuito resultante
es el mismo que el representado en la figura 3. Un tiempo δT después se desconecta el
interruptor S y conduce el diodo de marcha libre. El nuevo circuito es el representado en la
figura 4.
21
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
En el instante t = t off ' la corriente i L se anula, el circuito resultante de esta nueva
topología esta representado en la figura 5.
Fig. 5. Convertidor Buck durante “topología OFF’ ”, intervalo T
<t <T
OFF
'
De este modo se puede decir que: T = TON + TOFF + TOFF '
Por lo que las expresiones para el modo de conducción discontinuo son:
•
Durante la “topología ON” (S-“ON”, D-“OFF”):
dVC
R
1
·i L
·VC +
= −
dt
(R + RC )·C
(R + RC )·C
di L
R·RC i L Vin
R
· +
·VC − RSL +
= −
dt
R + RC L
L
(R + RC )·L
•
(4)
Durante la “topología OFF” (S-“OFF”, D-“ON”):
dVC
1
R
·VC +
·i L
= −
(
)
(
)
+
·
+
·
dt
R
R
C
R
R
C
C
C
R·RC i L
di L
R
·VC − RSL +
·
= −
dt
R + RC L
(R + RC )·L
(5)
22
SIMSCP - Simulador Convertidores Dc-Dc
•
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Durante la “topología OFF’ ” (S-“OFF”, D-“OFF”):
dVC
VC
=−
(R + RC )·C
dt
di L
=0
dt
(6)
4.2.- Convertidor Boost (Elevador)
El convertidor Boost, es un tipo de convertidor conmutado DC-DC también conocido
por el nombre de convertidor elevador (Step-Up) o chopper paralelo [6]. La función de este
convertidor es mantener una tensión de salida regulada frente a variaciones de la tensión de
entrada o de la carga.
Su principal aplicación se halla en la fuente de alimentación conmutadas (F.A.C.S) y
en el frenado regenerativo de los motores DC.
En la figura 6, se muestra el esquema del convertidor Boost. En el modelo del
convertidor utilizado en este proyecto se han incluido tanto la resistencia serie de la
bobina, como la resistencia serie del condensador.
Fig. 6. Esquema de un convertidor DC-DC tipo Boost
Este tipo de convertidor también es de segundo orden, ya que en él se pueden apreciar
dos elementos almacenadores de energía. Se muestra el circuito del convertidor en lazo
abierto para realizar un estudio detallado de su funcionamiento y definición de las
variables de estados.
23
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
4.2.1.- Funcionamiento Básico del convertidor Boost
En un regulador elevador, el voltaje promedio de salida Vo , es mayor que el voltaje de
entrada Vin , de ahí la palabra “elevador”. Se distingue al igual que en el Buck, dos modos
de operación, según la corriente por el inductor L se anule durante el periodo de operación
T: MCC y MCD.
En este convertidor, la energía que procede de la entrada Vin es conducida por el
elemento de conmutación para ser almacenada en la bobina. Este almacenamiento de
energía se efectúa durante el periodo de conducción del interruptor, no existiendo durante
este intervalo ningún tipo de transferencia de energía a la carga.
Cuando el conmutador se abre, la tensión que se produce en bornes de la bobina se
suma a la tensión de la fuente obteniéndose una tensión de salida superior a esta última y
con idéntica polaridad. Al mismo tiempo, la energía almacenada previamente por la bobina
es transferida a la carga.
Seguidamente se describen los modos de conducción, y en cada uno de ellos se
observarán sus topologías, de las cuales se obtendrán las ecuaciones características del
sistema, que expresadas en forma matricial serán las utilizadas por el Simulador del
proyecto.
4.2.1.1 Modo de conducción continua (MCC)
El transistor conmuta periódicamente con una frecuencia de conmutación ( f = 1 / T );
por tanto, el circuito presentará dos topologías según el estado en que se encuentre el
interruptor.
En t=0 comienza a conducir el interruptor S (“topología ON”), el circuito equivalente
de esta topología esta representado en la figura 7.
24
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Fig. 7. Convertidor Boost durante “topología ON”, intervalo 0 < t < TON
Durante el “intervalo TON ”, es decir 0 < t < TON , en que el interruptor se halla en
conducción (“ON”), por lo que solamente se establecerá flujo de corriente a través de la
bobina, ya que el diodo se encuentra polarizado inversamente, por lo tanto la corriente que
pasará por él será prácticamente nula ( i D ≅ 0 ).
A lo largo de este intervalo se producirá el almacenamiento de la energía en L.
Por consiguiente, en bornes de la bobina resulta una diferencia de potencial constante
de valor igual a la tensión de entrada Vin .
Durante la “topología ON” se verifican las siguientes expresiones:
dVC
VC
=−
(R + RC )·C
dt
di L
V
R
= − SL ·i L + in
dt
L
L
(7)
Un tiempo δT después el interruptor pasa a bloqueo (“topología OFF”). Se producirá
una inversión de polaridad en la bobina, debido a la imposibilidad de variar bruscamente la
intensidad que pasa por ella por lo que hace conducir al diodo D (diodo de marcha libre)
manteniendo así la continuidad de la corriente por L.
El nuevo circuito esta representado en la figura 8.
25
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Fig. 8. Convertidor Boost durante “topología OFF”, intervalo TOFF < t < T .
Ahora la bobina actúa como generador, sumándose su tensión a la tensión existente a
la entrada del convertidor. El condensador se carga a través del diodo con una tensión de
valor Vin menos la tensión inducida en la bobina. Por ello la corriente en la bobina es
decreciente mientras el interruptor no entra nuevamente en estado de conducción.
Gracias a dicha inversión de polaridad, la bobina actúa como receptor en el primer
estado y como generador en el segundo.
El filtro utilizado, C, tiene como misión recibir la energía que previamente ha
almacenado la bobina, manteniendo la tensión y corriente de salida durante todo el tiempo
que la bobina no entrega energía a la salida.
Durante el intervalo de tiempo TON < t < T en que el convertidor presenta esta
“topología OFF” se verifican las siguientes expresiones:
dVC
1
R
·VC +
·i L
= −
dt
(R + RC )·C
(R + RC )·C
R·RC i L Vin
di L
R
·VC − RSL +
· +
= −
dt
R + RC L
L
(R + RC )·L
(8)
26
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
4.2.1.2 Modo de conducción discontinua (MCD)
El modo de conducción discontinua presenta tres topologías. Las dos primeras son
iguales a las topologías presentadas para el modo de conducción continua, y la tercera se
define cuando los dos elementos conmutadores diodo de marcha libre e interruptor, están
bloqueados (OFF) a la vez.
La tercera topología se debe a que la bobina tiene tiempo suficiente para descargar la
energía almacenada.
Supondremos que la corriente se anula a partir de algún instante del intervalo
TON < t < T , hasta t=T. En t=0 comienza a conducir el interruptor S, el circuito resultante
es el mismo que el representado en la figura 7. Un tiempo δT después se desconecta el
interruptor S y conduce el diodo de marcha libre. El nuevo circuito es el representado en la
figura 8.
En el instante t = t off ' la corriente i L se anula, el circuito resultante de esta nueva
topología esta representado en la figura 9.
Fig. 9. Convertidor Boost durante “topología OFF’ ”, intervalo T
<t <T
OFF
'
Por lo que las expresiones para el modo de conducción discontinuo son:
•
Durante la “topología ON” (S-“ON”, D-“OFF”):
27
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
dVC
VC
=−
(R + RC )·C
dt
(9)
di L
V
R
= − SL ·i L + in
L
dt
L
•
Durante la “topología OFF” (S-“OFF”, D-“ON”):
dVC
R
1
·i L
·VC +
= −
(
)
(
)
dt
R
R
C
R
R
C
+
+
·
·
C
C
R·RC i L Vin
di L
R
· +
·VC − RSL +
= −
dt
L
R + RC L
(R + RC )·L
•
(10)
Durante la “topología OFF’ ” (S-“OFF”, D-“OFF”):
dVC
VC
=−
(R + RC )·C
dt
di L
=0
dt
(11)
4.3.- Convertidor Buck-Boost (Reductor-Elevador)
El convertidor Buck-Boost, es un tipo de convertidor conmutado DC-DC también
conocido por el nombre de convertidor “reductor-elevador” [5]. La principal aplicación de
este convertidor, que como su nombre indica puede trabajar tanto de convertidor elevador
como de reductor, se encuentra en aquellas fuentes conmutadas en las que se desea que la
polaridad de la tensión de salida sea contraria a la existente a la entrada del convertidor.
En la figura 10 aparece la disposición del circuito para un convertidor Buck-Boost.
Este tipo de convertidor se puede obtener a partir de la conexión en cascada de los dos
convertidores básicos mencionados anteriormente, Buck y Boost, de tal forma que la razón
de conversión del mismo vendrá configurada por el producto de las razones
correspondientes a estos dos convertidores.
28
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
En el modelo del convertidor utilizado en este proyecto se han incluido tanto la
resistencia serie de la bobina, como la resistencia serie del condensador.
Fig. 10. Esquema de un convertidor DC-DC tipo Buck-Boost
4.3.1.- Funcionamiento Básico del convertidor Buck-Boost
Un Convertidor Buck-Boost suministra un voltaje de salida que puede ser menor o
mayor que el voltaje de entrada, de ahí el nombre “reductor-elevador”; la polaridad del
voltaje de salida es opuesta a la del voltaje de entrada. Este regulador también se conoce
como regulador inversor.
Cuando el interruptor S se cierra, la fuente de entrada Vin se conecta a la bobina, al
mismo tiempo que el diodo D queda polarizado inversamente. Como consecuencia de esto,
la intensidad que circula por la inductancia crece linealmente, almacenando energía.
Transcurrido el TON , el interruptor se abre, con lo que la energía almacenada
previamente en la bobina se transfiere a través del diodo, al resto del circuito. Durante este
intervalo, TOFF del convertidor, la fuente no suministra ningún tipo de energía. Se
distingue al igual que en los convertidores anteriores, dos modos de operación, según la
corriente por el inductor L se anule durante el periodo de operación T: MCC y MCD.
De la misma forma que hemos venido haciendo con los anteriores convertidores,
seguidamente se describen los posibles modos de conducción.
29
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Para cada uno de ellos se observarán sus topologías, de las cuales se obtendrán las
ecuaciones características del sistema, que expresadas en forma matricial serán las
utilizadas por el Simulador del proyecto.
4.3.1.1 Modo de conducción continua (MCC)
El transistor conmuta periódicamente con una frecuencia de conmutación ( f = 1 / T );
por tanto, el circuito presentará dos topologías según el estado en que se encuentre el
interruptor. En t=0 comienza a conducir el interruptor S (“topología ON”), el circuito
equivalente de esta topología esta representado en la figura 11.
Fig. 11. Convertidor Buck-Boost durante “topología ON”, intervalo 0 < t < TON
Durante el “intervalo TON ”, es decir 0 < t < TON , en que el interruptor se halla en
conducción (“ON”) y por lo que solamente se establecerá flujo de corriente a través de la
bobina, ya que el diodo se encuentra polarizado inversamente, por lo tanto la corriente que
pasará por él será prácticamente nula ( i D ≅ 0 ). A lo largo de este intervalo se producirá el
almacenamiento de la energía en L.
Por consiguiente, en bornes de la bobina resulta una diferencia de potencial constante
de valor igual a la tensión de entrada Vin . Durante la “topología ON” se verifican las
siguientes expresiones:
dVC
VC
=−
(R + RC )·C
dt
di L
V
R
= − SL ·i L + in
dt
L
L
(12)
30
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Un tiempo δT después el interruptor pasa a bloqueo (“topología OFF”). Se genera
entonces una sobretensión que hace conducir al diodo D (diodo de marcha libre)
manteniendo así la continuidad de la corriente por L. El nuevo circuito esta representado
en la figura 12.
Fig. 12. Convertidor Buck-Boost durante “topología OFF”, intervalo TOFF < t < T .
Debido a la continuidad de la corriente, el condensador provoca una tensión inversa a
la carga, mientras el interruptor no entra nuevamente en estado de conducción.
Durante el intervalo de tiempo TON < t < T en que el convertidor presenta esta
“topología OFF” se verifican las siguientes expresiones:
dVC
1
R
·i L
·VC +
= −
dt
(R + RC )·C
(R + RC )·C
di L
R·RC i L
R
·
·VC − RSL +
= −
dt
R + RC L
(R + RC )·L
(13)
4.3.1.2 Modo de conducción discontinua (MCD)
El modo de conducción discontinua presenta tres topologías. Las dos primeras son
iguales a las topologías presentadas para el modo de conducción continua, y la tercera se
define cuando los dos elementos conmutadores diodo de marcha libre e interruptor, están
bloqueados (OFF) a la vez.
31
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
La tercera topología se debe a que la bobina tiene tiempo suficiente para descargar la
energía almacenada.
Supondremos que la corriente se anula a partir de algún instante del intervalo
TON < t < T , hasta t=T. En t=0 comienza a conducir el interruptor S, el circuito resultante
es el mismo que el representado en la figura 11. Un tiempo δT después se desconecta el
interruptor S y conduce el diodo de marcha libre. El nuevo circuito es el representado en la
figura 12.
En el instante t = t off ' la corriente i L se anula, el circuito resultante de esta nueva
topología esta representado en la figura 13.
Fig. 13. Convertidor Buck-Boost durante “topología OFF’ ”, intervalo T
<t <T
OFF
'
Por lo que las expresiones para el modo de conducción discontinuo para el convertidor
Buck-Boost son:
•
Durante la “topología ON” (S-“ON”, D-“OFF”):
dVC
VC
=−
(R + RC )·C
dt
di L
V
R
= − SL ·i L + in
dt
L
L
(14)
32
SIMSCP - Simulador Convertidores Dc-Dc
•
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Durante la “topología OFF” (S-“OFF”, D-“ON”):
dVC
R
1
·i L
·VC +
= −
dt
(R + RC )·C
(R + RC )·C
di L
R·RC i L
R
·
·VC − RSL +
= −
dt
R + RC L
(R + RC )·L
•
(15)
Durante la “topología OFF’ ” (S-“OFF”, D-“OFF”):
dVC
VC
=−
(R + RC )·C
dt
di L
=0
dt
(16)
4.4.- Convertidor Cuk
El convertidor Cuk, es un tipo de convertidor conmutado DC-DC perteneciente a la
familia de convertidores de cuarto orden [20]. En este convertidor se pueden apreciar la
existencia de dos condensadores (C1,C2) y de dos inductores (L1,L2). Los subíndices 1
hacen referencia a los elementos almacenadores de la entrada, y por lo contrario el
subíndice 2 hacen referencia a los de la salida.
La función de este convertidor es mantener una tensión de salida regulada frente a
variaciones de la tensión de entrada o de la carga.
Fig. 14. Esquema de un convertidor DC-DC tipo Cuk
33
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
En la figura 14 aparece la disposición del circuito para un convertidor Cuk. En el
modelo del convertidor utilizado en este proyecto se han incluido tanto las resistencias
series de las bobinas, como las resistencias serie de los condensadores.
4.4.1.- Funcionamiento Básico del convertidor Cúk
Un Convertidor Cúk suministra un voltaje de salida que puede ser menor o mayor que
el voltaje de entrada, la polaridad del voltaje de salida es opuesta a la del voltaje de
entrada. Este regulador también se conoce como regulador inversor.
Cuando el interruptor S se cierra, la fuente de entrada Vin se conecta a la bobina L1, al
mismo tiempo que el diodo D queda polarizado inversamente. Como consecuencia de esto,
la intensidad que circula por la inductancia L1 crece linealmente, almacenando energía.
Transcurrido el TON , el interruptor se abre, con lo que la energía almacenada
previamente en la bobina L1 junto con la de entrada se transfiere al condensador de entrada
C1. Durante este intervalo, TOFF del convertidor, la fuente no suministra ningún tipo de
energía a la salida. Por el contrario esta situación hace que el inductor L2 permita la
circulación de corriente en el mismo sentido, hacia el condensador C2 y la carga.
Se distingue al igual que en los convertidores anteriores, dos modos de operación,
según las corrientes por los inductores se anulen durante el periodo de operación T: MCC
y MCD.
De la misma manera en que se han analizado los convertidores anteriores, se analizará
el siguiente convertidor, el cual a partir de las diferentes topologías de funcionamiento se
extraerán las ecuaciones características, que serán estudiadas posteriormente.
4.4.1.1 Modo de conducción continua (MCC)
Al igual que el regulador Buck-Boost (reductor-elevador), el regulador Cúk
proporciona un voltaje de salida que puede ser menor o mayor, siendo la polaridad del
voltaje de salida opuesta a la polaridad del voltaje de entrada.
34
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
En t=0 comienza a conducir el interruptor S (“topología ON”), el circuito equivalente
de esta topología esta representado en la figura 15.
Fig. 15. Convertidor Cúk durante “topología ON”, intervalo 0 < t < TON
Durante el “intervalo TON ”, es decir 0 < t < TON , en que el interruptor se halla en
conducción (“ON”) y el diodo D tiene polarización inversa, por lo que la corriente se eleva
a través del inductor L1.
Simultáneamente, el voltaje del capacitor C1 pone en polarización inversa al diodo D
y lo desactiva. El capacitor C1 descarga su energía en el circuito formado por C1,C2, la
carga y L2. Las expresiones que determinan esta topología son las siguientes:
dVC 2
1
R
·i L 2
·VC 2 +
= −
dt
(R + RC 2 )·C 2
(R + RC 2 )·C 2
di L 2
R·RC 2 i L 2 VC1
R
· +
·VC 2 − RC1 + RS 2 +
= −
dt
R + RC 2 L 2 L 2 (17)
(R + RC 2 )·L 2
dVC1
i
= − L2
dt
C1
V
di L1
R
= − S1 ·i L1 + in
dt
L1
L1
La “topología OFF” empieza cuando se desconecta el interruptor, cuyo circuito se
representa en la figura 16. Se carga el capacitor C1 a partir del suministro de entrada y la
energía almacenada en el inductor L2 se transfiere a la carga.
35
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Fig. 16. Convertidor Cúk durante “topología OFF”, intervalo TOFF < t < T .
El diodo D y el interruptor proporcionan una conmutación sincronía. El capacitor C1
es el medio para la transferencia de energía de la fuente a la carga.
Las expresiones pertenecientes a la “topología OFF” son:
dVC 2
1
R
·i L 2
·VC 2 +
= −
dt
(R + RC 2 )·C 2
(R + RC 2 )·C 2
di L 2
R·RC 2 i L 2
R
·
·VC 2 − RS 2 +
= −
dt
R + RC 2 L 2 (18)
(R + RC 2 )·L 2
dVC1 i L1
=
dt
C1
V
V
di L1
R + RS 1
= − C1
·i L 2 − C1 + in
dt
L1
L1 L1
4.4.1.2 Modo de conducción discontinua (MCD)
El modo de conducción discontinua presenta tres topologías, igual que los
convertidores anteriores. Las dos primeras son iguales a las topologías presentadas para el
modo de conducción continua, y la tercera se define cuando los dos elementos
conmutadores diodo de marcha libre e interruptor, están bloqueados (OFF) a la vez.
La tercera topología se debe a que las dos bobinas tienen tiempo suficiente para
descargar la energía almacenada. Por lo tanto la condición para que esta tercera topología
ocurra es cuando la suma de las corrientes de los inductores se hagan cero.
36
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Supondremos que la suma de las corrientes se anula a partir de algún instante del
intervalo TON < t < T , hasta t=T. En t=0 comienza a conducir el interruptor S, el circuito
resultante es el mismo que el representado en la figura 15. Un tiempo δT después se
desconecta el interruptor S y conduce el diodo de marcha libre. El nuevo circuito es el
representado en la figura 16.
En el instante t = t off ' la suma de las corrientes i L1 + i L 2 se anula, por lo que el circuito
resultante de esta nueva topología esta representado en la figura 17.
Fig. 17. Convertidor Cúk durante “topología OFF’ ”, intervalo T
<t <T
OFF
'
Analizando el convertidor para el modo de conducción discontinua, se extraen las
siguientes expresiones, según la topología:
•
Durante la “topología ON” (S-“ON”, D-“OFF”):
dVC 2
1
R
·VC 2 +
·i L 2
= −
dt
(R + RC 2 )·C 2
(R + RC 2 )·C 2
R·RC 2
di L 2
R
·VC 2 − RC1 + RS 2 +
= −
(
)
dt
R + RC 2
R + RC 2 · L 2
dVC1
i
= − L2
dt
C1
V
di L1
R
= − S1 ·i L1 + in
dt
L1
L1
i L 2 VC1
· +
L2 L2
(19)
37
SIMSCP - Simulador Convertidores Dc-Dc
•
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Durante la “topología OFF” (S-“OFF”, D-“ON”):
dVC 2
1
R
·i L 2
·VC 2 +
= −
dt
(R + RC 2 )·C 2
(R + RC 2 )·C 2
R· RC 2
di L 2
R
·VC 2 − RS 2 +
= −
(
)
dt
R
R
·
L
2
R
+ RC 2
+
C2
dVC1 i L1
=
dt
C1
di L1
V
V
R + RS 1
= − C 1
·i L 2 − C1 + in
dt
L
1
L
1
L1
•
iL 2
·
L2
(20)
Durante la “topología OFF’ ” (S-“OFF”, D-“OFF”):
dVC 2
1
R
·i L1
·VC 2 +
= −
dt
(R + RC 2 )·C 2
(R + RC 2 )·C 2
R· RC 2
di L 2
R
·VC 2 − RS1 + RC1 + RS 2 +
=
· L1 + L 2)
R + RC 2
dt
(R + RC 2 )(
VC 1
Vin
+
−
(L1 + L 2) (L1 + L 2)
dVC1 i L1
=
dt
C1
VC 1
di L1
R
·VC 2 −
= −
− ...
· L1 + L 2)
(L1 + L 2 )
dt
(R + RC 2 )(
R· RC 2
− RS1 + RC1 + RS 2 +
R + RC 2
iL 2
·
+ ...
(L 2 + L1)
(21)
i L1
Vin
·
+
(L1 + L 2) (L1 + L 2)
4.5.- Convertidor SEPIC
El convertidor SEPIC, es también un tipo de convertidor conmutado DC-DC
perteneciente a la familia de convertidores de cuarto orden [14]. En la figura 18 aparece la
disposición del circuito para un convertidor SEPIC.
Como se puede apreciar este convertidor contiene cuatro elementos almacenadores de
energía: dos condensadores (C1,C2) y dos inductores (L1,L2), en los cuales también se
tienen en cuenta sus respectivas resistencias serie.
38
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Fig. 18. Esquema de un convertidor DC-DC tipo SEPIC
La función de este convertidor es mantener una tensión de salida regulada frente a
variaciones de la tensión de entrada o de la carga.
4.5.1.- Funcionamiento Básico del convertidor SEPIC
Un Convertidor SEPIC suministra un voltaje de salida que puede ser menor o mayor
que el voltaje de entrada, la polaridad del voltaje de salida es la misma a la del voltaje de
entrada.
Cuando el interruptor S se cierra, la fuente de entrada Vin se conecta a la bobina L1, al
mismo tiempo que el diodo D queda polarizado inversamente. Como consecuencia de esto,
la intensidad que circula por la inductancia L1 crece linealmente, almacenando energía. En
esta situación el condensador C1 alimenta al inductor L2 y el potencial de C2 es entregado a
la carga.
Transcurrido el TON , el interruptor se abre, con lo que la energía almacenada
previamente en la bobina L1 junto con la de entrada se transfiere al condensador de entrada
C1. Este intervalo del convertidor hace que la energía almacenada en el inductor L2 se
transfiera a C2 y la carga.
Se distingue al igual que en los convertidores anteriores, dos modos de operación,
según las corrientes por los inductores se anulen durante el periodo de operación T: MCC
y MCD.
39
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
De la misma manera que se analizaron los convertidores anteriores, se analizara el
SEPIC identificando los dos posibles modos de funcionamiento del convertidor y
estudiando sus respectivas ecuaciones características que representan el comportamiento
durante las diferentes topologías.
4.5.1.1 Modo de conducción continua (MCC)
En t=0 comienza a conducir el interruptor S (“topología ON”), el circuito equivalente
de esta topología esta representado en la figura 19.
Fig. 19. Convertidor SEPIC durante “topología ON”, intervalo 0 < t < TON .
Durante el “intervalo TON ”, es decir 0 < t < TON , el interruptor se halla en conducción
(“ON”), por lo que la corriente se eleva a través del inductor L1.
Simultáneamente, el voltaje del capacitor C1 pone en polarización inversa al diodo D
y lo desactiva. El capacitor C1 descarga su energía en el inductor L2, de igual forma que el
C2 lo descarga a la carga. Las expresiones que determinan esta topología son las siguientes:
dVC 2
1
·VC 2
= −
dt
(R + RC 2 )·C 2
V
di L 2
R + RS 2
= − C1
·i L 2 + C1
dt
L2
L 2 (22)
dVC1
i
= − L2
dt
C1
V
di L1
R
= − S1 ·i L1 + in
dt
L1
L1
40
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
La “topología OFF” empieza cuando se desconecta el interruptor, cuyo circuito se
representa en la figura 20. Se carga el capacitor C1 a partir del suministro de entrada y la
energía almacenada en el inductor L2 se transfiere al C2 y a la carga. El diodo D y el
interruptor proporcionan una conmutación sincronía.
Se puede apreciar que el capacitor C1 es el medio para la transferencia de energía de la
fuente a la carga y que la energía es transferida por todo el convertidor durante el periodo
del convertidor.
Fig. 20. Convertidor SEPIC durante “topología OFF”, intervalo TOFF < t < T .
Las expresiones pertenecientes a la “topología OFF” son:
dVC 2
1
R
1
·i L1
·i L 2 +
·VC 2 +
= −
(
)
(
)
(
)
dt
R
R
·
C
2
R
R
·
C
2
R
R
·
C
2
+
+
+
C2
C2
C2
di L 2
R·RC 2 i L 2 R·RC 2 i L1
R
·
· −
·VC 2 − RS 2 +
= −
dt
R + RC 2 L 2 R + RC 2 L 2
(R + RC 2 )·L 2
dVC1 i L1
=
dt
C1
R·RC 2
di L1
R
·VC 2 −
= −
dt
(R + RC 2 )·L1
R + RC 2
R·RC 2
− RS1 + RC1 +
R + RC 2
(23)
i L 2 VC1
· −
− ...
L1 L1
i L1 Vin
· +
L1 L1
41
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
4.5.1.2 Modo de conducción discontinua (MCD)
El modo de conducción discontinua presenta tres topologías, igual que los
convertidores anteriores. Las dos primeras son iguales a las topologías presentadas para el
modo de conducción continua, y la tercera se define cuando los dos elementos
conmutadores diodo de marcha libre e interruptor, están bloqueados (OFF) a la vez.
La tercera topología se debe a que las dos bobinas tienen tiempo suficiente para
descargar la energía almacenada. Por lo tanto esta tercera topología ocurrirá igual que en el
convertidor Cúk, es decir, cuando la suma de las corrientes de los inductores se hagan cero.
Supondremos que la suma de las corrientes se anula a partir de algún instante del
intervalo TON < t < T , hasta t=T. En t=0 comienza a conducir el interruptor S, el circuito
resultante es el mismo que el representado en la figura 19. Un tiempo δT después se
desconecta el interruptor S y conduce el diodo de marcha libre. El nuevo circuito es el
representado en la figura 20.
En el instante t = t off ' la suma de las corrientes i L1 + i L 2 se anula, por lo que el circuito
resultante de esta nueva topología esta representado en la figura 21.
Fig. 21. Convertidor SEPIC durante “topología OFF’ ”, intervalo T
<t <T .
OFF
'
Analizando el convertidor para el modo de conducción discontinua, se extraen las
siguientes expresiones, según la topología:
42
SIMSCP - Simulador Convertidores Dc-Dc
•
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Durante la “topología ON” (S-“ON”, D-“OFF”):
dVC 2
1
·VC 2
= −
dt
(R + RC 2 )·C 2
di L 2
V
R + RS 2
= − C1
·i L 2 + C1
dt
L2
L2
dVC1
i
= − L2
dt
C1
di L1
V
RS 1
= −
·i L1 + in
dt
L1
L1
•
(24)
Durante la “topología OFF” (S-“OFF”, D-“ON”):
dVC 2
1
1
R
·VC 2 +
·i L 2 +
·i L1
= −
(
)
(
)
(
)
+
+
+
·
2
·
2
·
2
R
R
C
R
R
C
dt
R
R
C
C2
C2
C2
R·RC 2 i L 2 R·RC 2 i L1
di L 2
R
·VC 2 − RS 2 +
· −
·
= −
R + RC 2 L 2 R + RC 2 L 2
dt
(R + RC 2 )·L 2
dVC1 i L1
=
dt
C1
R·RC 2
di L1
R
·VC 2 −
= −
dt
(R + RC 2 )·L1
R + RC 2
R·RC 2
− RS1 + RC1 +
R
+ RC 2
•
(25)
i L 2 VC1
· −
− ...
L1 L1
i L1 Vin
· +
L1 L1
Durante la “topología OFF’ ” (S-“OFF”, D-“OFF”):
dVC 2
1
·VC 2
= −
dt
(R + RC 2 )·C 2
VC1
Vin
di L 2
iL2
= −(RS 1 + RC1 + RS 2 )·
+
−
dt
(L2 + L1) (L1 + L2) (L1 + L2)
dVC1
i L 2 i L1
=−
+
dt
C1 C1
VC1
Vin
di L1
i L1
=−
− (RS1 + RC1 + RS 2 )·
+
dt
(L1 + L2)
(L1 + L2) (L1 + L2)
(26)
43
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
4.6.- Convertidor Buck con Filtro de Entrada
El convertidor Buck con filtro de entrada, es un tipo de convertidor conmutado DCDC perteneciente a la familia de convertidores de cuarto orden. En este convertidor se
pueden apreciar la existencia de dos condensadores y de dos inductores. La función de este
convertidor es mantener una tensión de salida regulada frente a variaciones de la tensión de
entrada o de la carga.
En la figura 22 aparece la disposición del circuito para un convertidor Buk con filtro
de entrada. En el modelo del convertidor utilizado en este proyecto se han incluido tanto
las resistencias series de las bobinas, como las resistencias serie de los condensadores.
Fig. 22. Esquema de un convertidor DC-DC tipo Buck con filtro de entrada
4.6.1.- Funcionamiento Básico del convertidor Buck con Filtro de Entrada
Un Convertidor Buck con Filtro de Entrada suministra un voltaje de salida que puede
ser menor o mayor que el voltaje de entrada, la polaridad del voltaje de salida es la misma
a la del voltaje de entrada.
Cuando el interruptor S se cierra, la fuente de entrada Vin se conecta a la bobina L1, al
mismo tiempo que el inductor es conectado con el resto del circuito. Al cerrarse el
interruptor el voltaje de C1 provoca que el diodo D quede polarizado inversamente. Como
consecuencia de esto, la intensidad que circula por la inductancia L1 crece linealmente, que
junto con el potencial de la entrada y del condensador C1 cargan el inductor L2, al mismo
tiempo que el potencial de C2 es entregado a la carga.
44
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Transcurrido el TON , el interruptor se abre, con lo que la energía almacenada
previamente en la bobina L1 junto con la de entrada se carga el condensador de entrada C1.
Este intervalo del convertidor hace que la energía almacenada en el inductor L2 se
transfiera a C2 y la carga.
Se distingue al igual que en los convertidores anteriores, dos modos de operación,
según la corriente por el inductor L2 se anule durante el periodo de operación T: MCC y
MCD.
De la misma manera en que se han analizado los convertidores anteriores, se analizará
el siguiente convertidor, el cual a partir de las diferentes topologías de funcionamiento se
extraerán las ecuaciones características, que serán estudiadas posteriormente.
4.6.1.1 Modo de conducción continua (MCC)
En t=0 comienza a conducir el interruptor S (“topología ON”), el circuito equivalente
de esta topología esta representado en la figura 23.
Fig. 23. Convertidor Buck con filtro de entrada durante “topología ON”, intervalo 0 < t < TON
Durante el “intervalo TON ”, es decir 0 < t < TON , en que el interruptor se halla en
conducción (“ON”), el potencial del condensador C1 provoca que el diodo D tenga
polarización inversa, por lo que la corriente se eleva a través del inductor L1.
Como consecuencia de esto, la intensidad que circula por la inductancia L1 crece
linealmente, que junto con el potencial de la entrada y del condensador C1 se carga el
inductor L2, al mismo tiempo que el potencial de C2 es entregado a la carga.
45
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Las expresiones que determinan esta topología son las siguientes:
dVC 2
1
R
·i L 2
·VC 2 +
= −
dt
(R + RC 2 )·C 2
(R + RC 2 )·C 2
di L 2
R·RC 2
1
·VC 2 − RC1 + RS 2 +
= −
dt
R + RC 2
(R + RC 2 )·L 2
i L 2 VC1 RC1
· +
·i L1
+
L2 L2 L 2
(27)
dVC1
i
i
= − L 2 + L1
dt
C1 C1
V
V
di L1 RC1
R + RC1
=
·i L1 + in
·i L 2 − C1 − S 1
dt
L1
L1
L1
L1
La “topología OFF” empieza cuando se desconecta el interruptor, cuyo circuito se
representa en la figura 24. La energía almacenada previamente en la bobina L1 junto con la
de entrada se carga el condensador de entrada C1. Este intervalo del convertidor hace que
la energía almacenada en el inductor L2 se transfiera a C2 y la carga.
Fig. 24. Convertidor Buck con filtro de entrada durante “topología OFF”, intervalo TOFF < t < T .
Las expresiones pertenecientes a la “topología OFF” son:
dVC 2
1
R
·i L 2
·VC 2 +
= −
dt
(R + RC 2 )·C 2
(R + RC 2 )·C 2
R· RC 2
di L 2
R
·VC 2 − RS 2 +
= −
dt
R + RC 2
(R + RC 2 )·L 2
dVC1 i L1
=
dt
C1
di L1
V
V
R + RC 1
= − C1 − S1
·i L1 + in
dt
L1
L1
L1
iL 2
·
L 2 (28)
46
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
4.6.1.2 Modo de conducción discontinua (MCD)
El modo de conducción discontinua presenta tres topologías, igual que los
convertidores anteriores. Las dos primeras son iguales a las topologías presentadas para el
modo de conducción continua, y la tercera se define cuando los dos elementos
conmutadores diodo de marcha libre e interruptor, están bloqueados (OFF) a la vez.
La tercera topología se debe a que la bobina L2 tiene tiempo suficiente para descargar
la energía almacenada.
Supondremos que la corriente se anula a partir de algún instante del intervalo
TON < t < T , hasta t=T. En t=0 comienza a conducir el interruptor S, el circuito resultante
es el mismo que el representado en la figura 23. Un tiempo δT después se desconecta el
interruptor S y conduce el diodo de marcha libre. El nuevo circuito es el representado en la
figura 24.
En el instante t = t off ' la corriente i L 2 se anula, por lo que el circuito resultante de esta
nueva topología esta representado en la figura 25.
Fig. 25. Convertidor Buck con filtro de entrada durante “topología OFF’ ”, intervalo T
<t <T
OFF
'
Analizando el convertidor para el modo de conducción discontinua, se extraen las
siguientes expresiones, según la topología:
•
Durante la “topología ON” (S-“ON”, D-“OFF”):
47
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
dVC 2
1
R
·i L 2
·VC 2 +
= −
dt
(R + RC 2 )·C 2
(R + RC 2 )·C 2
R· RC 2
di L 2
1
·VC 2 − RC1 + RS 2 +
= −
(
)
dt
R
R
·
L
2
R
+ RC 2
+
C2
dVC1
i
i
= − L 2 + L1
dt
C1 C1
di L1 RC1
V
V
R + RC 1
=
·i L 2 − C1 − S 1
·i L1 + in
dt
L
1
L
1
L
1
L1
•
i L 2 VC 1 RC 1
· +
+
·i L1
L 2 L2 L 2
(29)
Durante la “topología OFF” (S-“OFF”, D-“ON”):
dVC 2
1
R
·i L 2
·VC 2 +
= −
dt
(R + RC 2 )·C 2
(R + RC 2 )·C 2
R· RC 2
di L 2
R
·VC 2 − RS 2 +
= −
dt
R + RC 2
(R + RC 2 )·L 2
dVC1 i L1
=
dt
C1
V
di L1
V
R + RC 1
= − C1 − S1
·i L1 + in
L1
dt
L1
L1
•
iL 2
·
L2
(30)
Durante la “topología OFF’ ” (S-“OFF”, D-“OFF”):
dVC 2
1
·VC 2
= −
dt
(R + RC 2 )·C 2
dVC1 i L1
=
dt
C1
V
V
di L1
R + RC1
= − C1 − S1
·i L1 + in
dt
L1
L1
L1
(31)
4.7.- Convertidor Boost con Filtro de Salida
El convertidor Boost con filtro de salida, es un tipo de convertidor conmutado DC-DC
perteneciente también a la familia de convertidores de cuarto orden. Por lo que en este
convertidor se pueden apreciar también la existencia de dos condensadores (C1,C2) y de
dos inductores (L1,L2). La función de este convertidor es mantener una tensión de salida
regulada frente a variaciones de la tensión de entrada o de la carga.
48
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
En la figura 26 aparece la disposición del circuito para un convertidor Boost con filtro
de salida. En el modelo del convertidor utilizado en este proyecto se han incluido tanto las
resistencias series de las bobinas, como las resistencias serie de los condensadores.
Fig. 26. Esquema de un convertidor DC-DC tipo Boost con filtro de salida
4.7.1.- Funcionamiento Básico del convertidor Boost con Filtro de Salida
Un Convertidor Boost con Filtro de Salida suministra un voltaje de salida que puede
ser menor o mayor que el voltaje de entrada, la polaridad del voltaje de salida es la misma
a la del voltaje de entrada.
El comportamiento del convertidor es parecido al del Buck con filtro de entrada, con
la única diferencia que cuando el interruptor S se cierra, la fuente de entrada Vin se conecta
a la bobina L1, mientras que el potencial de C1 se entrega a la bobina L2, C2 y a la carga.
Cuando el interruptor se abre, y el diodo conduce, esto provoca la misma situación que
en convertidor anterior durante la “topología ON”, es decir, transfiere la energía de la
entrada a la salida, haciendo uso de los elementos almacenadores de energía.
Al igual que en los convertidores anteriores, se distinguen dos modos de operación:
MCC y MCD. A continuación se extraerán las ecuaciones características, a partir de las
diferentes topologías posibles del convertidor.
4.7.1.1 Modo de conducción continua (MCC)
En t=0 comienza a conducir el interruptor S (“topología ON”), el circuito equivalente
de esta topología esta representado en la figura 27.
49
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Fig. 27. Convertidor Boost con filtro de Salida durante “topología ON”, intervalo 0 < t < TON
Durante el “intervalo TON ”, es decir 0 < t < TON , en que el interruptor se halla en
conducción (“ON”) y el diodo D tiene polarización inversa, la bobina L1 se carga a traves
de la tensión de entrada.
Simultáneamente, se produce la descarga del condensador C1 sobre el circuito
formado por L2,C2, y la carga.
Las expresiones que determinan esta topología son las siguientes:
dVC 2
1
R
·VC 2 +
·i L 2
= −
dt
(R + RC 2 )·C 2
(R + RC 2 )·C 2
R·RC 2
di L 2
R
·VC 2 − RC1 + RS 2 +
= −
dt
R + RC 2
(R + RC 2 )·L 2
dVC1
i
= − L2
dt
C1
V
di L1
R
= − S1 ·i L1 + in
dt
L1
L1
i L 2 VC1
· +
L 2 L 2 (32)
La “topología OFF” empieza cuando se desconecta el interruptor, cuyo circuito se
representa en la figura 28. El comportamiento del convertidor en esta topología es el
mismo que presenta el convertidor anterior durante la “topología ON”, es decir, se
transfiere la energía desde la fuente de entrada a la carga haciendo uso de los elementos
almacenadores de energía.
50
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Fig. 28. Convertidor Boost con filtro de Salida durante “topología OFF”, intervalo TOFF < t < T .
Las expresiones pertenecientes a la “topología OFF” son:
dVC 2
1
R
·i L 2
·VC 2 +
= −
dt
(R + RC 2 )·C 2
(R + RC 2 )·C 2
R· RC 2
di L 2
1
·VC 2 − RC1 + RS 2 +
= −
dt
R + RC 2
(R + RC 2 )·L 2
dVC1
i
i
= − L 2 + L1
dt
C1 C1
V
V
di L1 RC1
R + RC 1
=
·i L 2 − C1 − S 1
·i L1 + in
L1
L1
L1
dt
L1
i L 2 VC 1 RC 1
· +
+
·i L1
(33)
L 2 L2 L 2
4.7.1.2 Modo de conducción discontinua (MCD)
El modo de conducción discontinua presenta tres topologías, igual que los
convertidores anteriores. Las dos primeras son iguales a las topologías presentadas para el
modo de conducción continua, y la tercera se define cuando los dos elementos
conmutadores diodo de marcha libre e interruptor, están bloqueados (OFF) a la vez.
La tercera topología se debe a que la bobina L1 tiene tiempo suficiente para descargar
la energía almacenada. Supondremos que la corriente se anula a partir de algún instante del
intervalo TON < t < T , hasta t=T.
En t=0 comienza a conducir el interruptor S, el circuito resultante es el mismo que el
representado en la figura 27. Un tiempo δT después se desconecta el interruptor S y
conduce el diodo de marcha libre. El nuevo circuito es el representado en la figura 28.
51
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
En el instante t = t off ' la corriente i L1 se anula, por lo que el circuito resultante de esta
nueva topología esta representado en la figura 29.
Fig. 29. Convertidor Boost con filtro de Salida durante “topología OFF’ ”, intervalo T
<t <T
OFF
'
Analizando el convertidor para el modo de conducción discontinua, se extraen las
siguientes expresiones, según la topología:
•
Durante la “topología ON” (S-“ON”, D-“OFF”):
dVC 2
1
R
·VC 2 +
·i L 2
= −
(
)
(
)
+
·
2
·
2
+
R
R
C
dt
R
R
C
C2
C2
R·RC 2
di L 2
R
·VC 2 − RC1 + RS 2 +
= −
dt
R + RC 2
(R + RC 2 )·L 2
dVC1
i
= − L2
dt
C1
V
di L1
R
= − S1 ·i L1 + in
dt
L1
L1
•
i L 2 VC1
· +
L2 L2
(34)
Durante la “topología OFF” (S-“OFF”, D-“ON”):
dVC 2
1
R
·VC 2 +
·i L 2
= −
dt
(R + RC 2 )·C 2
(R + RC 2 )·C 2
R· RC 2
di L 2
1
·VC 2 − RC1 + RS 2 +
= −
(
)
dt
R
+
R
·
L
2
R
+ RC 2
C2
dVC1
i
i
= − L 2 + L1
dt
C1 C1
di L1 RC1
V
V
R + RC 1
=
·i L 2 − C1 − S 1
·i L1 + in
dt
L
1
L
1
L
1
L1
i L 2 VC 1 RC 1
· +
+
·i L1
L 2 L2 L 2
(35)
52
SIMSCP - Simulador Convertidores Dc-Dc
•
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Durante la “topología OFF’ ” (S-“OFF”, D-“OFF”):
dVC 2
R + RC1
R
·VC1
·VC 2 +
= −
dt
(RC1·(R + RC 2 ) + RC 2 ·R )·C 2
(RC1·(R + RC 2 ) + RC 2 ·R )·C 2
(36)
dVC1
R
R + RC1
·VC1
·VC 2 −
=
(
(
)
)
(
(
)
)
dt
R
·
R
R
R
·
R
·
C
1
R
·
R
+
R
+
R
·
R
·
C
1
+
+
C2
C2
C2
C2
C1
C1
53
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
5.- Lazo de control
En los apartados anteriores se han estudiado los distintos tipos de convertidores
utilizados en el Simulador SIMSCP. Estos convertidores pueden sufrir variaciones tanto de
sus parámetros exteriores (tensión de entrada, variaciones de la potencia requerida por la
carga) como de los parámetros interiores (derivas de capacidades, autoinducciones por
envejecimiento, y calentamiento).
Estas variaciones influirán en el comportamiento según el sistema de control que
presente el convertidor. Los convertidores pueden funcionar tanto en Lazo abierto como en
Lazo cerrado.
A continuación se describen los sistemas de control según se encuentre trabajando el
convertidor.
5.1.- Lazo abierto
El convertidor trabajando en lazo abierto no tiene ningún tipo de realimentación, por
lo que la señal de conmutación (señal que gobierna el estado del conmutador) vendrá
determinada al efectuar la comparación entre una señal de referencia, con otra señal de
frecuencia fija procedente de un oscilador que determina la frecuencia de funcionamiento
del sistema.
Para representar el funcionamiento del lazo abierto se ha escogido el convertidor Buck
(reductor), el cual se representa en la figura 30. Este tipo de control es aplicable a los
diferentes convertidores utilizados por el simulador SIMSCP.
La rampa esta caracterizada por sus valores alto Vu , bajo VL y su periodo T, tal y
como se describe en la siguiente ecuación:
Vramp (t ) = V L +
VU − V L
·t (37)
T
54
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Fig. 30. Convertidor Buck en lazo abierto
La comparación de la señal de control Vcont, (la referencia,(Vref)) con la rampa
(Vramp), genera la señal de conmutación que actúa sobre el conmutador resultando en dos
posibilidades difrentes conocidas en la literatura como “Trailing Edge Modulation” (TEM)
que tiene como lógica de control la siguiente:
Vcont > Vramp → S : ON
Vcont < Vramp → S : OFF
(38-a)
y “Leading Edge Mo dulation” (LEM) que tiene como lógica de control la siguiente:
Vcont < Vramp → S : ON
Vcont > Vramp → S : OFF
(38-b)
Variando el nivel de referencia de la señal Vcont, se pueden modificar los tiempos de
conducción y de bloqueo del conmutador con el objetivo de obtener ciclos de trabajos
diferentes.
55
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Al permanecer los valores de TON y TOFF fijos en el circuito, el ciclo de trabajo del
convertidor será constante, con lo cual si sufriera variaciones tanto de sus parámetros
exteriores (rizado de la tensión de entrada o variaciones de la carga) como de los interiores
(cambios de frecuencia de la señal de control, derivas de capacidades, autoinducciones por
envejecimiento, calentamiento), la tensión de salida también se vería afectada (convertidor
no regulado).
Haciendo uso del simulador SIMSCP, en la figura siguiente se ilustran los tiempos de
conmutación en función de la comparación de la señal Vcont con la Vramp.
Fig. 31. Representación de los tiempos de conducción. Lógica ON-OFF
La descripción del lazo abierto es valida para cualquier convertidor (segundo y cuarto
orden) a que hace referencia el simulador, ya que en dicho lazo no intervienen las variables
de estado.
5.2.- Lazo cerrado
Independientemente del tipo de convertidor, el nivel de la señal de salida depende
directamente del ciclo de trabajo, por tanto a fin de mantener constante el nivel de dicha
señal, el valor del ciclo de trabajo ha de variar según las condiciones instantáneas de
potencia requerida por la carga.
56
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Para que el convertidor dependa poco de la variación de los parámetros se debe
regular con un circuito de control (controlador) que suministre una consigna (tensión o
corriente) y que intente mantener el estado del convertidor próximo a ella.
Por lo que la regulación se efectúa en lazo cerrado mediante lazos de prealimentación
y de realimentación que traducen las desviaciones en una desviación de signo contrario de
la potencia entregada a la carga modificando el ciclo de trabajo de la señal de conmutación
[15].
La prealimentación es el control que traduce las desviaciones de los parámetros y la
realimentación es el control que traduce las desviaciones de su estado actual ( vC , i L ) en una
señal de error que lleva la información de la desviación del estado actual respecto del
requerido, y que para hacerlo periódicamente, se ayuda de unas señales de reloj auxiliares
periódicas. Al conjunto convertidor más controlador se denomina regulador.
El modulador es el elemento encargado de regular los tiempos de conducción y de
bloqueo del conmutador, es decir, el ciclo de trabajo de la señal de conmutación, en
función de las señales recibidas desde los elementos de muestra y referencia. Así, ante
posibles variaciones de la señal de entrada, el sistema debe reaccionar para compensar
dicha variación. Por ejemplo, en el caso de que la tensión de entrada disminuya, el circuito
de control aumentará el ciclo de trabajo de la señal de ataque al conmutador a fin de
mantener constante la tensión de salida. Por otra parte, si la carga varía de valor, el control
actuará de forma similar a lo explicado respecto a la entrada.
Naturalmente, la variación del ciclo de trabajo o margen de control tiene siempre unos
límites que dependen, en general, de las tensiones de entrada y de salida, de la frecuencia
de conmutación y de la rapidez con que el sistema deba retornar a sus condiciones de
equilibrio.
Básicamente, el control de la señal de salida puede efectuarse de dos formas
diferentes, cuya naturaleza, dependiente de las características de la señal de conmutación,
da lugar a dos sistemas de control diferentes:
57
SIMSCP - Simulador Convertidores Dc-Dc
•
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Sistema de control a frecuencia fija: la frecuencia de conmutación se mantiene
constante, variando únicamente el tiempo de conducción t ON de la señal.
•
Sistema de control a frecuencia variable: puede efectuarse a su vez de dos formas
diferentes, según que el tiempo de conducción sea fijo o variable.
En este proyecto esta basado en el sistema de control a frecuencia fija, por lo que a
continuación se estudia su funcionamiento.
5.2.1.- Sistema de control a frecuencia fija
Este método consiste en combinar la señal de error, obtenida al efectuar la
comparación entre la señal de muestra y la señal de referencia, con otra señal de frecuencia
fija procedente de un oscilador que determina la frecuencia de funcionamiento del sistema
[8].
El resultado de esta combinación es otra señal, cuya frecuencia queda fijada por el
oscilador y cuyo ciclo de trabajo es función de la señal de salida. Se dice entonces que la
señal obtenida está modulada mediante Modulación por Ancho de Pulso, (PWM) [9].
Dependiendo de la forma en que se toma la muestra, estos sistemas pueden clasificarse
a su vez en:
•
Sistema de control PWM por muestra de tensión.
•
Sistema de control PWM por muestra de corriente.
•
Sistemas de control PWM por muestra combinada tensión-corriente.
En estos modos de control es necesario efectuar el cálculo de los sensores de forma
que estos no supongan una carga apreciable en la parte del circuito donde han de
conectarse.
58
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
5.2.1.1 Sistema de Control PWM por muestra de Tensión
Este tipo de control también se conoce con el nombre de Control de Tensión. En el
diagrama de bloques mostrado en la figura 32 se observa que la muestra se toma
directamente de la salida del circuito.
Esta muestra es comparada analógicamente con una tensión de referencia, cuyo valor,
depende de la magnitud de la tensión de salida deseada. De esta comparación se obtiene el
error, el cual se amplifica para darle flexibilidad operativa. Por lo que la expresión de la
señal de control para los convertidores de segundo orden corresponde al siguiente tipo:
Vcont = Kv·(Vo − Vref ) (39)
Donde la Vo es la tensión de salida, Vref la tensión de referencia y Kv es la
amplificación de dicho error. Los posibles cambios en la tensión de salida, son detectados
por el elemento de muestra, de tal forma quedan reflejados en la expresión (39).
Fig. 32. Convertidor Buck controlado por tensión.
59
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
La comparación de la señal de control Vcont, con la rampa (Vramp), genera la señal de
conmutación que en función de su magnitud, actúa sobre el conmutador obligando al
convertidor a variar su ciclo de trabajo.
La regulación de la tensión de salida no es inmediata y depende de la magnitud de la
variación, por tanto, es posible que el circuito necesite de varios ciclos de conmutación
para llevar la señal de salida al nivel deseado.
En los convertidores de cuarto orden al existir dos condensadores (C1,C2), se obtienen
dos puntos de muestra diferentes. Cada una de estas tensiones ( VC1 , VC 2 ) son comparadas
con sus referencias ( Vref 1 ,Vref 2 ), definiendo así la expresión de la señal de control para
estos tipos de convertidores:
Vcont = K v1 ·(Vc1 − Vref 1 ) + K v 2 ·(Vc 2 − Vref 2 ) (40)
En estos convertidores haciendo uso de las constantes Kv1 y Kv2, se puede hacer
depender la señal Vcont tanto del voltaje del condensador C1, como del condensador C2 o
de los dos al mismo tiempo.
5.2.1.2 Sistema de Control PWM por muestra de Corriente
Este sistema de control es conocido también por el nombre de Control de
Corriente. En la figura 33 se muestra el diagrama de bloques correspondiente.
En este tipo de control la muestra es de corriente, normalmente se toma en el inductor,
ya que es la zona donde se producen las máximas variaciones de la corriente por la carga.
Este sistema estabiliza al circuito frente a las posibles variaciones de la señal de entrada.
Esta muestra de corriente es comparada con una referencia Iref, por lo que la
expresión de la señal Vcont vendrá expresada en función de la corriente.
Vcont = Ki·(i − Iref ) (41)
60
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Donde i es la corriente que circula por el inductor, Iref la corriente de referencia y Ki
es la ganancia que se le da a este error.
De la misma forma que en el control de tensión, la comparación de la señal de control
Vcont, con la rampa (Vramp), genera la señal de conmutación que en función de su
magnitud, actúa sobre el conmutador obligando al convertidor a variar su ciclo de trabajo.
Fig. 33. Convertidor Buck controlado por corriente.
En los convertidores de cuarto orden al existir dos inductores (L1,L2), se obtienen dos
puntos de muestra diferentes. Cada una de estas corrientes( i L1 , i L 2 ) son comparadas con sus
referencias ( I ref 1 , I ref 2 ), definiendo así la expresión de la señal de control para estos tipos
de convertidores:
Vcont = K i1 ·(i L1 − I ref 1 ) + K i 2 ·(i L 2 − I ref 2 ) (42)
61
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
En estos convertidores haciendo uso de las constantes Ki1 y Ki2, se puede hacer
depender la señal Vcont tanto de la corriente del inductor L1, como del inductor L2 o de las
dos al mismo tiempo.
5.2.1.3 Sistema de Control PWM por muestra combinada Tensión-Corriente.
Combinando ambos efectos, el circuito obtenido queda estabilizado ante cualquier
variación, tanto de la tensión de entrada como del valor de la carga. Este sistema de control
queda reflejado en la figura 34.
Fig. 34. Convertidor Buck controlado por tensión-corriente.
Este tipo de control es actualmente el más completo y se utiliza generalmente cuando
el bloque regulador se diseña a partir de circuitos integrados. Este tipo de control recibe
también el nombre de “Control lineal de Estado” o también “Control de doble lazo”.
62
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Mediante este sistema, la señal Vcont obtenida en el circuito de control por tensión se
combina analógicamente con la señal generada por el circuito de control por corriente, tal y
como se presenta en la siguiente expresión:
Vcont = a·[Kv·(Vo − Vref ) + Ki·(i − Iref )] (43)
Igualmente la comparación de la señal de control Vcont, con la rampa (Vramp), genera
la señal de conmutación proporcional a las variaciones tanto de entrada como de salida del
regulador, reestableciendo las condiciones de régimen prefijadas para la carga, obligando
al convertidor a variar su ciclo de trabajo.
Este sistema de control para los convertidores de cuarto orden también viene
determinado por la combinación analógica de la señal Vcont obtenida por el control de
tensión con la del control de corriente. Siendo la expresión de la señal de control general:
[
]
Vcont = a· K V 1 ·(VC1 − Vref 1 ) + K C 2 ·(VC 2 − Vref 2 ) + K i1 ·(i L1 − I ref 1 ) + K i 2 ·(i L 2 − I ref 2 ) (44)
5.2.1.4 Histéresis
La teoría de control demuestra que los reguladores pueden presentar dinámicas
especificas, denominadas refractivas y deslizantes. Si una orbita llega a una región
deslizante, el estado del regulador se desliza por ella conmutando a una frecuencia
teóricamente infinita. Por lo que si se alcanza en ella un ciclo límite, este será de frecuencia
de conmutación infinita que, aunque en la práctica esta limitada por los tiempos de
conmutación de los interruptores, produce elevadas pérdidas de potencia que destruyen
rápidamente el interruptor por elevación de su temperatura.
Un método para impedir este fenómeno consiste en introducir una histéresis en el
comparador (regulación autónoma con histéresis) que produce a través del conjunto de
parámetros del regulador una dinámica periódica de periodo T [12]. Por lo tanto cuando el
control regule, variará tanto el periodo T de la dinámica como el ciclo de trabajo. Este tipo
de regulador recibe el nombre de “free running” o “autooscilantes”.
63
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
La comparación que se viene haciendo en los sistemas de control anteriores se basa
simplemente en la comparación de la señal Vcont con la Vramp. Esta comparación es
modificada al introducir la Histéresis.
En la figura 35 se representa el convertidor Buck, junto con el control de estado con
control de histéresis.
Fig. 35. Convertidor Buck con control de histéresis.
Dicho control introduce una variación de los limites de la tensión de rampa, es decir,
Vramp ± Vh (donde Vh es el incremento a añadir). Por lo que la nueva comparación viene
descrita por la siguiente expresión:
Vcont <> Vramp ± Vh (45)
En el caso de los convertidores de segundo orden:
a·[Kv·(Vo − Vref ) + Ki·(i − Iref )] <> Vramp ± Vh (46)
O bien, en los convertidores de cuarto orden:
[
]
a· K V 1 ·(VC1 − Vref 1 ) + K C 2 ·(VC 2 − Vref 2 ) + K i1 ·(i L1 − I ref 1 ) + K i 2 ·(i L 2 − I ref 2 ) <> Vramp ± Vh (47)
64
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
6.- Solución de las Ecuaciones Diferenciales de los Convertidores
Generalmente, en relación con el funcionamiento del interruptor, los estados a tener en
cuenta son dos: ON y OFF. En el caso de que el sistema presente un funcionamiento en
modo de conduccion discontinuo (MCD), se consideran tres estados: ON, OFF y OFF’.
Durante cada configuración las ecuaciones que describen el sistema son ecuaciones
lineales e invariantes en el tiempo (LTI) que de una manera compacta se pueden escribir en
la forma siguiente:
x& (t ) = A·x(t ) + B
vc(t )
x(t ) =
i L (t )
(48)
Siendo x la variable correspondiente al vector de estado que contiene las tensiones y
las corrientes de los elementos almacenadores de energía. Las matrices A y B, describen el
comportamiento del convertidor según en la topología en que se encuentre. Dichas
matrices son construidas a partir de las ecuaciones diferenciales de los diferentes
convertidores a simular, expresadas de forma matricial. Los elementos que introducen
pérdidas, como la resistencia serie del condensador y/o la resistencia serie de la bobina,
también se incluyen en las matrices anteriores.
Si el convertidor se encuentra funcionando en modo de conducción continuo (MCC)
las matrices serán las siguientes:
x& = A1 ⋅ x + B1
durante TON
x& = A2 ⋅ x + B2
durante TOFF
(49)
Si por el contrario el convertidor se encuentra funcionando en modo de conducción
discontinuo (MCD), se introduce una nueva matriz (A3,B3) debido a una nueva topología
( TOFF ′' ).
x& = A1 ⋅ x + B1
durante TON
x& = A2 ⋅ x + B2
durante TOFF (50)
x& = A3 ⋅ x + B3
durante TOFF ′ '
65
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
En cada una de las matrices de los diferentes convertidores a que hace referencia el
simulador SIMSCP, se introduce la integral del error entre la variable de salida y la tensión
deseada. Dicha variable se describe tal y como se muestra en la expresión (51)
T
s = ∫ (Vo − Vdes ) (51)
0
Donde s define como la integral del error, Vo la tensión de salida y Vdes la tensión
deseada en el convertidor. La introducción en las matrices se consigue derivando dicha
expresión, de tal forma que cumpla la expresión anteriormente explicada (52).
ds
= Vo − Vdes (52)
dt
A continuación se describen las matrices de los convertidores, según su topología.
6.1.- Las Matrices de los Convertidores
En los convertidores de segundo orden (Buck, Boost, Buck-Boost) al añadirle una
tercera variable las matrices presentará una dimensión (3x3), y en los convertidores de
cuarto orden (Cúk, SEPIC, Buck con Filtro de Entrada, Boost con Filtro de Salida) las
matrices resultantes serán de dimensión (5x5).
6.1.1.- Matrices del convertidor Buck
A partir del sistema de ecuaciones diferenciales (4), (5) y (6), y teniendo en cuenta la
variable de error las matrices resultantes para cada una de sus topologías son:
Topología ON:
AON
dVc
1
dt −
( R + Rc)·C
R
dIL
= −
=
dt ( R + Rc )·L
1
ds
dt
R
( R + Rc)·C
Rs·( R + Rc) + R·Rc
−
( R + Rc )·L
0
0
Vc
0· IL
0 S
BON
0
Vin
=
L
− Vdes
66
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Topología OFF:
dVc
1
dt −
( R + Rc )·C
dIL
R
= −
=
dt ( R + Rc)·L
1
ds
dt
AOFF
0
Vc
0· IL
0 S
R
( R + Rc )·C
Rs·( R + Rc) + R·Rc
−
( R + Rc)·L
0
BOFF
0
= 0
− Vdes
Topología OFF’:
AOFF '
dVc
1
dt −
( R + Rc )·C
dIL
=
0
=
dt
1
ds
dt
0 0 Vc
0 0· IL
0 0 S
BOFF '
0
= 0
− Vdes
6.1.2.- Matrices del convertidor Boost
A partir del sistema de ecuaciones diferenciales (9), (10) y (11), y teniendo en cuenta
la variable de error las matrices resultantes para cada una de sus topologías son:
Topología ON:
AON
dVc
1
dt −
( R + Rc)·C
dIL
=
=
0
dt
1
ds
dt
0
−
Rs
L
0
0
Vc
0· IL
0 S
BON
0
Vin
=
L
− Vdes
Topología OFF:
AOFF
dVc
1
dt −
( R + Rc )·C
dIL
R
= −
=
dt ( R + Rc)·L
1
ds
dt
R
( R + Rc )·C
Rs·( R + Rc) + R·Rc
−
( R + Rc)·L
0
0
Vc
0· IL
0 S
BOFF
0
Vin
=
L
− Vdes
Topología OFF’:
67
SIMSCP - Simulador Convertidores Dc-Dc
AOFF '
dVc
1
dt −
( R + Rc )·C
dIL
=
0
=
dt
1
ds
dt
E.T.S.E : ELECTRÓNICA INDUSTRIAL
0 0 Vc
0 0· IL
0 0 S
BOFF '
0
= 0
− Vdes
6.1.3.- Matrices del convertidor Buck- Boost
A partir del sistema de ecuaciones diferenciales (14), (15) y (16), y teniendo en cuenta
la variable de error las matrices resultantes para cada una de sus topologías son:
Topología ON:
AON
dVc
1
dt −
( R + Rc)·C
dIL
=
=
0
dt
1
ds
dt
0
−
Rs
L
0
0
Vc
0· IL
0 S
BON
0
Vin
=
L
− Vdes
Topología OFF:
dVc
1
dt −
( R + Rc )·C
R
dIL
= −
=
dt ( R + Rc)·L
1
ds
dt
AOFF
R
( R + Rc )·C
Rs·( R + Rc) + R·Rc
−
( R + Rc)·L
0
0
Vc
0· IL
0 S
BOFF
0
= 0
− Vdes
Topología OFF’:
AOFF '
dVc
1
dt −
( R + Rc )·C
dIL
=
=
0
dt
1
ds
dt
0 0 Vc
0 0· IL
0 0 S
BOFF '
0
= 0
− Vdes
68
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
6.1.4.- Matrices del convertidor Cúk
A partir del sistema de ecuaciones diferenciales (19), (20) y (21), y teniendo en cuenta
la variable de error las matrices resultantes para cada una de sus topologías son:
Topología ON:
AON
dVc 2
dt
1
R
−
+
+
(
R
Rc
2
)·
C
2
(
R
Rc
2)·C 2
dIL 2
R
R·Rc 2 1
dt −
( R + Rc 2)·L 2 − Rc1 + Rs 2 + R + Rc 2 · L 2
dVc1
=
=
1
dt 0
−
dIL1
C1
0
dt 0
ds 1
0
dt
0
0
0
Vc 2
1
0
0 IL 2
L2
·Vc1
0
0
0
IL1
Rs1 S
−
0
0
L1
0
0
0
BON
0
0
= 0
Vin
L1
− Vdes
BOFF
0
0
= 0
Vin
L1
− Vdes
Topología OFF:
AOFF
dVc 2
dt
R
1
0
−
dIL 2 ( R + Rc 2)·C 2 ( R + Rc 2)·C 2
R
R·Rc 2 1
dt −
( R + Rc 2)·L 2 − Rs 2 + R + Rc 2 · L 2 0
dVc1
=
=
dt 0
0
0
dIL1
( Rc1 + Rs1)
1
−
−
dt 0
L
L
1
1
ds 1
0
0
dt
0
0
Vc 2
0
0 IL 2
·Vc1
1
0
C1 IL1
0
0 S
0
0
Topología OFF’:
A
OFF'
dVc2
dt
1
−
R
+
Rc
(
2)·C2
dIL2
R
dt
(R + Rc2)·(L1 + L2)
dVc1
=
=
dt 0
dIL1
R
−
dt (R + Rc2)·(L1 + L2)
ds 1
dt
R
0
0
− Rs1 + Rc1 + Rs2 +
R·Rc2
1
1
·
R + Rc2 ( L1 + L2) ( L1 + L2)
( R + Rc2)·C2
0
0
0
1
0
0
0
C1
0
−
0
0
1
( L1 + L2)
− Rs1 + Rc1 + Rs2 +
0
R·Rc2
1
0
·
R + Rc2 ( L1 + L2)
0
Vc2
IL2
·Vc1
IL1
S
69
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
BOFF '
0
Vin
−
( L1 + L 2)
= 0
Vin
( L1 + L 2)
− Vdes
6.1.5.- Matrices del convertidor SEPIC
A partir del sistema de ecuaciones diferenciales (24), (25) y (26), y teniendo en cuenta
la variable de error las matrices resultantes para cada una de sus topologías son:
Topología ON:
AON
dVc 2
dt
1
−
+
R
Rc
(
2)·C 2
dIL 2
dt
0
dVc1
=
=
dt 0
dIL1
dt 0
ds 1
dt
0
−
(Rc1 + Rs 2)
L2
1
−
C1
0
0
0
0
0
Vc 2
1
0
0 IL 2
L2
·Vc1
0
0
0
IL1
Rs1
−
0
0 S
L1
0
0
0
BON
0
0
= 0
Vin
L1
− Vdes
Topología OFF:
AOFF
dVc2
1
dt
− ( R + Rc2)·C2
dIL
2
R
dt −
( R + Rc2)·L2
dVc1
=
=
dt 0
dIL1
R
dt − ( R + Rc2)·L1
ds
1
dt
R
0
( R + Rc2)·C2
R·Rc2 1
− Rs2 +
0
·
R
+ Rc2 L2
0
−
0
Rc2·R
( R + Rc2)·L1
R
( Rc2 + R)·C2
Rc2·R
−
( Rc2 + R)·L2
1
0
C1
1
R·Rc2 1
−
− Rs1 + Rc1 +
L1
R + Rc2 L1
0
0
0
0
Vc2
0 IL2
0
·Vc1 BOFF = 0
0
Vin
IL1
L1
0 S
− Vdes
0
70
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Topología OFF’:
AOFF'
dVc2
1
dt
− (R + Rc2)·C2
dIL2
dt 0
dVc1
=
=
dt 0
dIL1
dt 0
ds
1
dt
0
Vc2
1
1
− (Rs1+ Rc1 + Rs2)·
0
0 IL2
(L1+ L2) (L1+ L2)
·Vc1
1
1
−
0
0
C1
C1
IL1
1
1
−
− (Rs1 + Rc1+ Rs2)
0
0 S
(L1+ L2)
(L1 + L2)
0
0
0
0
0
0
0
BOFF'
0
Vin
−
(L1 + L2)
= 0
Vin
+
(
1
2
)
L
L
− Vdes
6.1.6.- Matrices del convertidor Buck con filtro de entrada
A partir del sistema de ecuaciones diferenciales (29), (30) y (31), y teniendo en cuenta
la variable de error las matrices resultantes para cada una de sus topologías son:
Topología ON:
AON
dVc 2
dt
1
R
−
+
+
(
2
)·
2
(
2)·C 2
R
Rc
C
R
Rc
2
dIL
R
R·Rc 2 1
dt −
( R + Rc 2)·L2 − Rc1 + Rs 2 + R + Rc 2 · L 2
1
dVc
=
=
1
dt 0
−
dIL1
C1
Rc1
dt 0
L1
ds 1
0
dt
0
0
1
L2
Rc1
L2
1
0
C1
1
( Rs1 + Rc1)
−
−
L1
L1
0
0
0
Vc 2
0 IL2
·Vc1
0
IL1
0 S
0
BON
0
0
= 0
Vin
L1
− Vdes
BOFF
0
0
= 0
Vin
L
− Vdes
Topología OFF:
AOFF
dVc 2
dt
1
R
0
−
+
+
(
2
)·
2
(
2)·C 2
R
Rc
C
R
Rc
dIL 2
R
R·Rc 2 1
dt −
( R + Rc 2)·L 2 − Rs 2 + R + Rc 2 · L 2 0
dVc1
=
=
dt 0
0
0
dIL1
1
−
0
dt 0
L
1
ds 1
0
0
dt
0
0
1
C1
( Rs1 + Rc1)
−
L1
0
0
Vc 2
0 IL2
·Vc1
0
IL1
0 S
0
71
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Topología OFF’:
dVc 2
dt
1
dIL 2 − ( R + Rc 2)·C 2
dt
0
dVc1
= 0
=
dt
dIL1
0
dt
ds 1
dt
AOFF '
0 0
0
0 0
0
1
0 0
C1
1
( Rs1 + Rc1)
−
0 −
L1
L1
0 0
0
0 Vc 2
0 IL 2
0·Vc1
IL1
0
S
0
BOFF '
0
0
= 0
Vin
L1
− Vdes
6.1.7.- Matrices del convertidor Boost con filtro de salida
A partir del sistema de ecuaciones diferenciales (34), (35) y (36), y teniendo en cuenta
la variable de error, las matrices resultantes para cada una de sus topologías son:
Topología ON:
AON
dVc 2
dt
R
1
−
dIL 2 ( R + Rc 2)·C 2 ( R + Rc 2)·C 2
R
R·Rc 2 1
dt −
( R + Rc 2)·L 2 − Rc1 + Rs 2 + R + Rc 2 · L 2
dVc
1
=
=
1
dt 0
−
dIL1
C1
0
0
dt
ds 1
0
dt
0
Vc 2
1
0
0 IL 2
L2
·Vc1
0
0
0
IL1
Rs1 S
−
0
0
L1
0
0
0
0
0
BON
0
0
= 0
Vin
L1
− Vdes
Topología OFF:
AOFF
dVc 2
dt
1
R
−
R
Rc
C
R
Rc
(
+
2
)·
2
(
+
2)·C 2
dIL
2
R
R·Rc 2 1
dt −
( R + Rc 2)·L 2 − Rc1 + Rs 2 + R + Rc 2 · L 2
dVc1
=
=
1
dt 0
−
dIL1
C1
Rc1
dt 0
L1
ds 1
0
dt
0
1
L2
0
Rc1
L2
1
0
C1
1
( Rs1 + Rc1)
−
−
L1
L1
0
0
0
Vc 2
0 IL 2
·Vc1
0
IL1
0 S
0
BOFF
0
0
= 0
Vin
L1
− Vdes
72
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Topología OFF’:
AOFF '
dVc2
dt
R + Rc1
dIL2 −
dt ( Rc1 ⋅ ( R + Rc2) + Rc2 ⋅ R)·C 2
0
dVc1
R
=
=
dt ( Rc1 ⋅ ( R + Rc2) + Rc2 ⋅ R)·C 2
dIL1
0
dt 1
ds
dt
R
( Rc1 ⋅ ( R + Rc2) + Rc2 ⋅ R)·C 2
0 0
R + Rc1
0 −
( Rc1 ⋅ ( R + Rc2) + Rc2 ⋅ R)·C1
0 0
0
0 0
0 0 Vc2
0 0 IL2
0 0·Vc1
IL1
0 0
S
0 0
BOFF '
0
0
= 0
0
− Vdes
6.2.- Algoritmo de cálculo
Un sistema dinámico determinista es aquel sistema cuyo estado en cualquier instante
puede ser determinado completamente a partir de su estado inicial y su ecuación que
describe exactamente su comportamiento. Un circuito que contiene elementos resistivos
(resistencias y/o fuentes de tensión y/o corriente) y elementos de almacenamiento de
energía (condensadores y/o inductores) puede ser modelado como un sistema dinámico
determinista continuo en el tiempo. La evolución del estado del circuito se describe
mediante un sistema ordinario de ecuaciones diferenciales llamadas ecuaciones de estado.
A continuación se describe el procesado de las ecuaciones de estado de los
convertidores para poder llevar a cabo la simulación. Primeramente se debe encontrar la
solución del sistema matricial:
x& (t ) = A·x(t ) + B ⇒ x& (t ) − A·x(t ) = B (53)
e − At ·( x& (t ) − A·x(t )) = e − At ·B (54)
d − At
(e · x(t )) = e − At ·B (55)
dt
Integrando entre un tiempo inicial t o y t
t
e − At ·x(t ) − e − At0 ·x(t 0 ) = ∫ e − Aτ ·Bdτ (56)
t
73
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Multiplicando por e At y reorganizando los términos, la solución es:
t
x(t ) = e A(t −t0 ) · x(t 0 ) + ∫ e A(t −τ ) ·Bdτ (57)
t
El algoritmo de calculo se basa en procesar directamente las soluciones analíticas de
cada topología dentro de un periodo. El sistema se describe mediante un determinado
número de muestras dentro del periodo, a partir de las cuales se permite conocer su
dinámica. A partir de unas condiciones iniciales establecidas, el simulador trabaja con las
soluciones analíticas de cada topología, quedando por resolver los instantes de
conmutación.
Para ello se ha utilizado la función fsolve, para calcular con precisión el instante de
conmutación, es decir, los ceros de la ecuación:
f (t ) = vcont (t ) − vramp(t ) (58)
El algoritmo llama a la función cuando se detecta un cambio de signo en la función
f(t), por lo tanto se avanza con un paso condicionado por el número de muestras, en busca
del cambio de signo. Una vez encontrado el intervalo donde se produce el cruce, la función
fsolve
proporciona el tiempo (tn) en el cual se anula f(t) y por lo tanto habrá una
conmutación. Es a partir de este instante cuando se realiza el cambio de topología,
quedando establecidas las condiciones iniciales con las muestras de la topología anterior
hasta el tiempo (tn).
Las matrices a utilizar en cada momento hacen referencia a la “Topología ON” y
“Topología OFF”, las cuales vendrán determinadas por el tipo de convertidor
seleccionado y del tipo de lógica establecida para la simulación (descrita en apartado
7.3.2).
Para la simulación de un determinado número de periodos se condicionan las muestras
de tal manera, que las muestras de final de ciclo son las condiciones iniciales para el
siguiente.
74
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
A medida que la variable tiempo avanza, el simulador va generando continuamente
datos que, a su vez son recogidos y tratados por una determinada sección del programa.
En el caso de configurar el simulador con el modo discontinuo, el algoritmo de calculo
procesa igualmente las soluciones analíticas de cada topología con la única diferencia de
tener en cuenta la corriente del inductor. El procesado es el mismo que el explicado
anteriormente, con la peculiaridad de que durante la “Topología OFF” debe tener en
cuenta que la corriente del inductor no sea inferior a cero (corriente circulando en sentido
contrario).
Para ello se utiliza nuevamente la función fsolve, asociada a fichero condi23 para
calcular con precisión el instante de conmutación, es decir, los ceros de la ecuación:
f (t ) = i L (t ) (59)
El algoritmo llama a la función cuando estando en la “Topología OFF” detecta un
valor negativo para la corriente del inductor, en el caso de convertidores de segundo orden
(en los convertidores de cuarto orden corresponde a una combinación lineal de dichas
corrientes), por lo tanto se avanza con un paso condicionado por el número de muestras, en
busca del cambio de signo. Una vez encontrado el intervalo donde se produce el cruce, la
función fsolve proporciona el tiempo (tn) en el cual se encuentra el cero de la función. Es a
partir de este cuando se realiza el cambio de “Topología OFF” a “OFF’ ”, quedando
establecidas las condiciones iniciales con las muestras de la “Topología OFF” hasta el
tiempo (tn).
El simulador tiene la posibilidad de hacer barridos de parámetros, lo que quiere decir
que se ha de poder realizar varias simulaciones consecutivas. Estas simulaciones pueden
actuar de forma aislada o de forma cooperativa: pueden generar resultados independientes
o bien construir un gráfico entre todas ellas. También tiene la posibilidad de realizar
modificaciones de parámetros dentro de una simulación, con el fin de poder simular
posibles perturbaciones en los parámetros del sistema.
75
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
7.- El Simulador SIMSCP
7.1.- Descripción General
El programa de Simulación de Convertidores DC-DC, (SIMSCP),
realizado en
MATLAB V6.1, permite al usuario de forma interactiva modelar su sistema a simular de
una manera cómoda y sencilla.
Para la realización de este proyecto se ha utilizado la herramienta GUIDE (Graphical
User Interface Development Environment). El Simulador se compone de un “Menú
Principal”, donde el usuario selecciona el convertidor que desee simular. Una vez elegido
uno de los siete convertidores ofrecidos por el simulador se accede a la “Pantalla de
configuración”. En esta pantalla el usuario mediante el uso del ratón y teclado, configura
todos los parámetros y comportamientos que desee incluir en la simulación.
Ajustados los parámetros se accede a las “Pantallas de Simulación”. El Simulador
ofrece cuatro pantallas de simulación según la necesidad requerida por el usuario. Por
defecto se accede a la “Pantalla principal de Simulación”, siendo las tres pantallas
restantes “hijas” de esta.
Cada una de estas pantallas que componen el Simulador SIMSCP se describen a
continuación.
7.2.- Menú Principal
En el arranque del programa, es necesario definir las condiciones iniciales de
funcionamiento y el entorno de la pantalla de simulación para la interacción con el usuario.
La función que arranca el Simulador, SIMSCP se divide en las funciones de:
-
Configuración del programa
-
Presentación del Simulador (figura 36)
-
Creación del entorno de interfaz entre usuario y el programa (“Menú
Principal”).
76
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Fig. 36. Presentación del Simulador “SIMSCP”.
La pantalla de presentación se visualiza durante un segundo. Al finalizar se define la
pantalla de selección de convertidor “Menú Principal” mediante la función menu, siendo
mostrada en la figura 37.
Fig. 37. Menú Principal
Desde esta pantalla se pueden acceder mediante push-button, a simular unos de los
siete convertidores contemplados en este proyecto: Buck, Boost, Buck-Boost, Cúk, SEPIC,
Buck con Filtro de Entrada y Boost con Filtro de Salida. Cada unos de estos push-button,
esta asociado a la función simulbuck, y a una variable global (CONVERTIDOR) que determina
el convertidor a simular.
77
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
El push-button “Salir”, asociado a la función quit permite al usuario la salida directa
del simulador, cerrando así la pantalla “Menú Principal”.
7.3.- Pantalla de configuración
Esta pantalla puede ser construida mediante dos funciones que dependerán del orden
del convertidor seleccionado. En ella se definen una serie de controles uicontrol, [pushbutton, radio-button, checkbox,..] con los cuales el usuario puede introducir los valores de
los parámetros, como activar o desactivar las diferentes opciones presentadas por el
Simulador.
Según el tipo de convertidor (segundo o cuarto orden) a simular esta pantalla
presentara una serie de modificaciones debido a la complejidad del circuito (variables de
estado). Para ilustrar dicha pantalla se ha escogido el convertidor Buck, la cual es
representada en la figura 38.
Fig. 38. Representación Pantalla Configuración
78
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Independientemente del convertidor seleccionado, la “Pantalla de configuración”
presenta unos valores y opciones por defecto, para evitar que el usuario cada vez que
arranque el simulador tenga que introducir todos los parámetros. De esta forma solamente
modificará aquellos parámetros que no sean apropiados para su simulación.
En esta pantalla se pueden destacar una serie de grupos, los cuales hacen referencia a
un comportamiento determinado del circuito a simular. Una parte de esta pantalla es
dedicada al ajuste de los parámetros que forman el convertidor, permitiendo también la
modificación de la tensión de entrada aplicada al mismo.
Otra zona de especial interés es el ajuste de las condiciones iniciales de las variables
de estado, que su número estará determinado por el orden del convertidor seleccionado. En
esta pantalla también se le permite al usuario modificar los parámetros que construyen la
señal de control, es decir, tanto las consignas (referencias) para cada variable de estado
como las constantes multiplicativas.
Se permite ajustar la función rampa variando los limites ( Vu , V L ), como el ajuste de su
periodo. Ofreciendo la posibilidad de introducir la Histéresis del comparador.
La solicitud de información más importante se centra en el número de muestras y en
el número de ciclos a simular, ya que estos dos parámetros determinan la precisión y
duración de la simulación.
A parte de valores numéricos el usuario puede seleccionar una serie de opciones como
la lógica de control establecida durante la simulación, como también seleccionar el modo
de funcionamiento del convertidor: MCC o MCD. El usuario puede hacer uso de los
estabilizadores ofrecidos por el simulador seleccionando el tipo de estabilizador deseado, y
ajustando los parámetros del mismo.
Mediante los radio button se activan o desactivan los diferentes latch ofrecidos por el
simulador, entre ellos destaca: “Evitar Multiconmutaciones”, “Forzar ON” y “Forzar
OFF”.
79
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Una de las últimas cosas añadidas a este simulador es la oportunidad de introducir una
perturbación del tipo escalón de cualquier variable del circuito durante una simulación.
Este fenómeno enriquece al simulador ya que se puede comprobar como responde el
sistema variando uno de sus parámetros.
Por último existe un marco de seis push-button, donde el usuario selecciona la
siguiente operación a realizar por el simulador SIMSCP. A continuación se describen cada
una de las acciones asociadas a los diferentes controles:
-
El push-button “Volver”: Permite al usuario volver al “Menú Principal”, para
poder seleccionar otro convertidor.
-
El push-button “Simular”: esta asociado a la función simuladorr3, en el caso
que el radio button Perturbacion se encuentre seleccionado. En caso contrario
esta asociado a la función simuladorr, encargada de iniciar la simulación
utilizando los parámetros introducidos en la “Pantalla de configuración”.
Antes de comenzar la simulación se comprueba que los parámetros introducidos
por el usuario sean correctos, en caso contrario se le avisará mediante un
mensaje del error producido. Durante la simulación la función waitbar, se
encarga de visualizar el estado del procesado mediante una barra, donde su
posición depende del número de ciclos simulados con respecto al total a
simular, tal y como se representa en la figura 39. Este control permite acceder a
la “Pantalla principal de representación”.
Fig. 39. Estado del Procesado de la simulación.
-
El push-button “About”: Permite recuperar la presentación del Simulador,
visualizando el nombre del Director y del Creador del presente Proyecto.
80
SIMSCP - Simulador Convertidores Dc-Dc
-
E.T.S.E : ELECTRÓNICA INDUSTRIAL
El push-button “Ayuda”: De manera interactiva el simulador ofrece al usuario
la información necesaria para poder rellenar todos los campos de configuración.
-
El push-button “Informe”: Asociado a la función informe, presenta un listado
con toda la información de la configuración, pudiendo ser impreso.
-
El push-button “Salir”, asociado a la función quit permite al usuario la salida
directa del simulador SIMSCP, cerrando así la “Pantalla de Configuración”.
7.3.1.- Ajuste de parámetros
El ajuste de los parámetros se consigue mediante los controles button tipo edit,
proporcionados por la función uicontrol. El usuario con la ayuda del teclado y ratón
introduce los valores de los parámetros necesarios para la simulación.
La validación de los valores introducidos se consigue cambiando de edit o
simplemente pulsando la tecla return. Si algún valor introducido por el usuario es erróneo
el simulador le informa con un mensaje de error. A continuación se describen los
diferentes apartados que componen la “Pantalla de configuración”.
7.3.1.1 Componentes
El conjunto de controles edit text que forman el apartado de componentes de la
“Pantalla de configuración”, permiten al usuario introducir los valores de los elementos
que describen al propio convertidor. En el caso de convertidores de segundo orden los
parámetros son los siguientes:
-
“R”: determina el valor de la resistencia de carga del convertidor.
“C”: ajusta el valor del condensador del propio convertidor.
“Rc”: determina el valor de la resistencia serie del condensador.
“L”: define el valor de la bobina.
“Rs”: la resistencia serie de la bobina.
En el caso de simular convertidores de cuarto orden, la información solicitada para el
ajuste se ve modificada al verse incrementado el número de elementos reactivos del propio
convertidor. Estos nuevos valores consisten en los siguientes:
81
SIMSCP - Simulador Convertidores Dc-Dc
-
E.T.S.E : ELECTRÓNICA INDUSTRIAL
“R”: el valor de la Resistencia de carga del convertidor.
“ C1 ”: ajusta el Condensador de entrada del convertidor.
“ Rc1 ”: la resistencia serie del condensador de entrada(C1).
“ L1 ”: bobina de entrada del convertidor.
“ Rs1 ”: la resistencia serie de la bobina de entrada (L1).
“ C 2 ”: ajusta el Condensador de salida del convertidor.
“ Rc 2 ”: la resistencia serie del condensador de salida (C2).
“ L2 ”: bobina de salida del convertidor.
“ Rs 2 ”: la resistencia serie de la bobina de salida (L2).
Cada uno de estos edit está asociado a una variable interna del programa que permiten
definir las matrices de los convertidores a simular.
7.3.1.2 Condiciones iniciales (CI)
Para la introducción de las condiciones iniciales de las variables de estado se dispone
de tres controles tipo edit, para el caso de los convertidores de segundo orden y de cinco
controles en el caso de convertidores de cuarto orden.
Debido a la introducción de la variable de error en la definición de las matrices de los
convertidores, también se ha permitido introducir su condición inicial como parámetro.
Estos valores una vez validados son introducidos en un vector columna, tal y como se
definen matricialmente las variables de estado, respetando su posición.
CI tension (Vc)
xo = CI corriente (i L )
CI error ( s )
ó
CI
CI
xo = CI
CI
CI
tension (Vc 2 )
corriente (i L 2 )
tension (Vc1 )
corriente (i L1 )
error ( s )
7.3.1.3 Consignas
Para el ajuste de las consignas o referencias se han utilizado button tipo edit. Tal y
como se describió en el lazo de control, cada una de las variables de estado tiene su
consigna o referencia. Por lo que el número de edit vendrá determinado por el convertidor
que se esté simulando.
82
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Para los convertidores de segundo orden de dispone de dos edit que permiten el ajuste
de los valores para la referencia de tensión y de corriente. Observando la expresión de la
señal de control se aprecian estas dos referencias.
[ (
) (
Vcont = a· Kv· Vo − Vref + Ki· i − Iref
)] (60)
Por el contrario, para los convertidores de cuarto orden presentan cuatro edit, al
existir dos tensiones y dos corrientes. Observando la expresión de la señal de control se
aprecian estas cuatro referencias.
Vcont = a· K V 1 ·VC1 − Vref 1 + K V 2 ·VC 2 − Vref 2 + K i1 · i L1 − I ref 1 + K i 2 · i L 2 − I ref 2 (61)
Dentro de este grupo de consignas también se permite ajustar el valor de la tensión de
salida deseada del convertidor, Vdes. Este valor es utilizado en la variable de error, (variable
añadida en las definiciones de las matrices).
T
s = ∫ (Vo − Vdes )
0
→
ds
= Vo − Vdes (62)
dt
7.3.1.4 Muestras, ciclos y constan tes.
La “Pantalla de configuración”, presenta una sección donde se permite la
introducción del número de muestras, número de ciclos a simular y el ajuste de las
diferentes constantes utilizadas en la expresión de control.
Con la ayuda del button tipo edit, se permite que el usuario pueda introducir el número
de muestras por ciclo, utilizado por el programa. Dicho número configurará la precisión
del algoritmo de calculo, el cual esta explicado en apartados anteriores.
Por otro lado, a través también de un button tipo edit, el usuario puede ajustar el
número de ciclos a simular. Una vez introducidos y validados los valores en estos edit, se
comprueba que sean positivos y diferentes de cero, evitando así valores incorrectos.
83
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
En caso de introducir valores negativos o cero, el simulador informa al usuario
mediante un mensaje de error, creado mediante la función warndlg.
En función del número de muestras y del número de ciclos, se determinará el tiempo
de procesado del simulador. Cuanto mayor sean los valores, mayor es el tiempo de
simulación y viceversa.
El número de las constantes a ajustar viene determinado por el tipo de convertidor
seleccionado. Viendo la expresión de control para cada uno de ellos, se determinan las
constantes requeridas. En el caso de simular convertidores de segundo orden la expresión
de control se define en la expresión (63), donde se observan las constantes Kv, Ki, Kint y
Kvin.
[
]
Vcont = a· K V ·(V − V ref ) + K i ·(i − I ref ) + K int ·s + K vin ·Vin (63)
Por el contrario, en el caso de simular convertidores de cuarto orden la expresión de
control se define en la expresión (64), donde se observan las constantes Kv1, Ki1 ,Kv2 ,Ki2,
Kint y Kvin.
[
Vcont = a· K V 1 ·(V C1 − V ref 1 ) + K V 2 ·(VC 2 − V ref 2 ) + K i1 ·(i L1 − I ref 1 ) + K i 2 ·(i L 2 − I ref 2 ) + K int ·s + K vin ·Vin
]
(64)
Independientemente del convertidor a simular, en esta sección se presentan unas
constantes fijas, entre las cuales destaca la propia constante a, incluida en la expresión de
control de ambos tipos de convertidores. El ajuste de esta constante se realiza mediante un
control button tipo edit.
Otro parámetro a introducir dentro de esta sección es el valor de la Histerésis, este
ajuste se realiza también mediante edit. Dentro de esta pantalla también se permite ajustar
la función rampa, la cual esta caracterizada por sus valores alto Vu , bajo VL y su periodo T,
tal y como se describe en la siguiente ecuación:
84
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Vramp (t ) = V L +
VU − V L
·t (65)
T
7.3.2.- Lógica de Control
En este proyecto se han tenido en cuenta dos posibles versiones para la realización del
control PWM. Estas dos versiones se caracterizan por la obtención de la señal error y por
la comparación de la señal de control con la rampa, tal y como se describe en la figura
siguiente.
Fig. 40. Versiones posibles para el control PWM: a) Lógica control ON-OFF
b) Lógica control OFF-ON
A continuación se describen cada una de ellas, las cuales se identifican como “Lógica
ON-OFF” y “Lógica OFF-ON”. La visualización de cada una de estas lógicas, se
consigue mediante la ayuda del simulador SIMSCP, ilustrando una orbita periódica junto
con la señal rampa.
•
Lógica ON-OFF
Esta lógica de control se define al realizar la comparación de la señal de control Vcont,
( Vcont = a (Vref − v) ) con la rampa (Vramp), generando así la señal de conmutación que
actúa sobre el interruptor de la siguiente forma:
85
SIMSCP - Simulador Convertidores Dc-Dc
Vcont > Vramp → S : ON
Vcont < Vramp → S : OFF
E.T.S.E : ELECTRÓNICA INDUSTRIAL
(66)
Haciendo uso de estas expresiones, una manera de representar gráficamente la lógica
de control ON-OFF, es la mostrada en la figura 41:
Fig. 41. Representación de la lógica ON-OFF.
•
Lógica OFF-ON
Del mismo modo la lógica OFF-ON, determina la comparación de la señal de control
Vcont, ( Vcont = a (v − Vref ) ) con la rampa (Vramp), generando la señal de conmutación que
actúa sobre el interruptor de la siguiente forma:
Vcont < Vramp → S : ON
Vcont > Vramp → S : OFF
(67)
Haciendo uso de estas expresiones, una manera de representar gráficamente la lógica
de control OFF-ON, es la mostrada en la figura 42:
86
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Fig. 42. Representación de la Lógica OFF-ON.
Para poder llevar a cabo esta selección de lógicas de control, es necesario introducir un
parámetro (cont) en la señal de control el cual adecue la comparación en cada momento. La
expresión de la señal de control para los convertidores de segundo orden:
Vcont = cont·a·[Kv·(Vo − Vref ) + Ki·(i − Iref )] (68)
Para convertidores de cuarto orden:
[
]
Vcont = cont·a· K V 1 ·(VC1 − Vref 1 ) + K V 2 ·(VC 2 − Vref 2 ) + K i1 ·(i L1 − I ref 1 ) + K i 2 ·(i L 2 − I ref 2 ) (69)
El simulador SIMSCP, mediante el control tipo radio button permite la selección de
las dos lógicas de funcionamiento. El radio button “ON-OFF”, ajusta la “lógica ONOFF” estableciendo la variable cont=-1. Por el contrario el radio button “OFF-ON”, se
encarga de ajustar la “lógica OFF-ON” estableciendo la variable cont=1.
87
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
7.3.3.- Modos de operación MCC/MCD
El simulador SIMSCP permite para los diferentes convertidores seleccionar entre los
dos modos de operación posibles: Modo Conducción Continua (MCC) y Modo Conducción
Discontinua (MCD). La selección se realiza mediante el control tipo radio button: “Modo
Continuo” y “Modo Discontinuo”.
En el modo MCC el simulador utiliza las matrices correspondientes a la topología ON
y a la topología OFF dependiendo de la lógica de control seleccionada. Este modo de
funcionamiento no tiene en cuenta las corrientes de los interruptores, simplemente se
centra en la comparación de la señal de control con la rampa, la cual determinará los
cambios de topología correspondientes y por tanto las matrices a utilizar.
Por el contrario el modo MCD puede utilizar tanto las matrices de la topología ON,
topología OFF o la topología OFF’. El modo discontinuo habitual se produce cuando el
interruptor esta abierto (OFF), porque le obliga la señal moduladora, y el diodo, que
debería conducir, deja de hacerlo porque la corriente intenta circular en sentido contrario.
La detección del modo discontinuo para los convertidores de segundo orden se
produce cuando la corriente del inductor se hace cero. En cambio para los convertidores de
cuarto orden se basa en una combinación lineal de las corrientes de los inductores.
A continuación se describen las condiciones que permiten la detección del modo
discontinuo para los diferentes convertidores de cuarto orden:
-
Convertidor Cúk y SEPIC: En estos convertidores la detección se basa en que la
suma de las corrientes de los dos inductores se haga cero, es decir: i L1 + i L 2 = 0 .
-
Convertidor Buck con Filtro de Entrada: En este convertidor la detección se
centra en la corriente del inductor de salida (L2), es decir: i L 2 = 0 .
-
Convertidor Boost con Filtro de Salida: La detección se realiza contemplando
la corriente del inductor entrada (L1), es decir: i L1 = 0 .
88
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
En las figuras siguientes se ilustran el Modo de Conducción Continua (MCC) y el
Modo de Conducción Discontinua (MCD) para los convertidores de segundo y cuarto
orden. En la figura 43 se representa la corriente del inductor del convertidor Buck
configurado en MCC.
Fig. 43. Corriente del inductor en el convertidor Buck, configurado en MCC
Como se puede obervar la corriente se hace negativa en determinados periodos de
simulación, por lo que la corriente cambia de sentido en el diodo. En la figura 44 se
muestra la corriente del inductor una vez que se activa el Modo Discontinuo.
Fig. 44. Corriente del inductor en el convertidor Buck, configurado en MCD
89
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
La activación del Modo discontinuo ha permitido que la corriente no circule en sentido
contrario, esto se debe al tener en cuenta el comportamiento del convertidor durante la
topología OFF’.
Para ilustrar el modo de conducción discontinua para los convertidores de cuarto
orden se ha utilizado el convertidor SEPIC. En la figura 45 se ilustran las corrientes por los
dos inductores (i L1 , i L 2 ) y la suma de ellas (i L1 + i L 2 ) , configurado en MCC.
IL1, IL2,
IL1+ IL2
Fig. 45. Corrientes en el SEPIC configurado en MCC.
Como se puede observar las corrientes de los diferentes inductores adoptan valores
positivos y negativos, por lo que la suma de estas también. Esto es debido a que durante la
configuración MCC se utilizan solamente las configuraciones de las topologías ON y OFF.
En la figura 46 se representan estas corrientes una vez que se activa el Modo
Discontinuo.
90
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
IL1, IL2,
IL1+ IL2
Fig. 46. Corrientes en el SEPIC configurado en MCD.
Con la representación anterior se pone de manifiesto que la activación del Modo
Discontinuo para el convertidor SEPIC se produce cuando la suma de las corrientes se
anula: i L1 + i L 2 = 0 .
7.3.4.- Biestables (Latch)
El modelo PWM tradicional es aplicable con ciertas restricciones ya que no permite
evitar las multiconmutaciones producidas dentro de un periodo, ni forzar una topología
determinada a final de ciclo.
Para asegurar que se produzca una y solo una conmutación por ciclo, se añade al
control PWM un flip-flop como inhibidor de las multiconmutaciones. De la misma manera
se añade un biestable a través del cual permite el forzado de las diferentes topologías.
91
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
A continuación se describen cada uno de estos Latch, mostrando algunas
representaciones donde se observe su comportamiento y eficacia.
7.3.4.1 Evitar Multiconmutacione s
Dependiendo de los valores introducidos y del tipo de control seleccionado, puede
darse el caso que en algunos periodos de conmutación la señal de control cruce dos o más
veces con la rampa, produciendo así subintervalos de conmutación dentro del periodo, en
lugar de los dos habituales [9].
Una manera de evitar este fenómeno es introduciendo un latch, el cual permita
eliminar todas estas multiconmutaciones producidas dentro del periodo. El simulador
SIMSCP permite la simulación de este tipo de latch, seleccionando desde la “Pantalla de
configuración”, el button tipo edit, “Evitar Multiconmutaciones”.
La función de este tipo de latch consiste en detectar el primer cambio de topología
producido (si existe), a través de la comparación de la señal de control con la rampa, dentro
de un periodo. Una vez detectado el primer cambio inhibe los posibles siguientes,
manteniendo al convertidor en su topología hasta final de ciclo.
Al finalizar el periodo actual, nuevamente debe detectar el primer cambio de topología
producido (si existe), realizando así el mismo proceso para cada unos de los ciclos a
simular.
En las siguientes figuras se ilustra el funcionamiento del Latch,”Evitar
Multiconmutaciones”. En la figura 47 se representa una dinámica donde existen
multicionmutaciones dentro de los periodos de simulación. Una vez que se activa el Latch,
estas multiconmutaciones son inhibidas, ya que a partir de la primera conmutación el
convertidor se mantiene en dicha topología hasta final de ciclo. El resultado de la
activación del Latch se representa en la figura 48.
92
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Fig. 47. Representación de las multiconmutaciones
Fig. 48. Efecto del Latch, “Evitar Multiconmutaciones”
El esquema general de este control se representa en la figura 49. Se puede observar
que la señal moduladora viene determinada directamente por el Latch, el cual utiliza la
señal de salida del comparador y la señal clock, que viene determinada por los periodos de
la rampa. En posibles implementaciones esta señal de reloj puede ser generada por un
clock externo, sin tener relación con la señal rampa.
93
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Fig. 49. Esquema general del circuito de control con Latch.
7.3.4.2 Forzado
Otro tipo de Latch implementado en el simulador SIMSCP, es el de poder forzar a una
topología determinada a final de ciclo. Se permite forzar tanto a la “topología ON” como a
la “topología OFF”, seleccionando desde la “Pantalla de configuración”, el radio button ,
“Forzar ON” o “Forzar OFF” .
El forzado impide que los interruptores conmuten a una frecuencia de conmutación
infinita, evitando así su destrucción. También permite controlar la corriente del inductor
para garantizar su estabilidad y por lo que se denomina popularmente control de corriente
[13],[18].
A continuación se describen los dos tipos de forzados posibles en el simulador
SIMSCP.
94
SIMSCP - Simulador Convertidores Dc-Dc
•
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Forzar ON
Para poder llevar a cabo este tipo de forzado, se añade al control PWM un biestable
tipo RS, donde su entrada R(Reset) es igual a la salida del comparador, su entrada S(Set) se
conecta a la señal de reloj y su salida Q(quit) es la señal de conmutación que actúa sobre el
interruptor. El esquema del diagrama del control de corriente, es mostrado en la figura
siguiente.
Fig. 50. Diagrama del Forzado “ON”
En este modo control de corriente, el controlador especifica el valor máximo de la
corriente del inductor. La corriente del inductor es comparada con una corriente de
referencia, la cual realiza el Reset del Biestable. De manera más exacta, el interruptor S es
activado “ON” a cada comienzo de ciclo (t=nT, n ∈ N y T el periodo de reloj) y
desactivado “OFF” cuando el valor de la corriente del inductor alcanza a la referencia
máxima. El interruptor permanecerá en “OFF” hasta el comienzo del siguiente ciclo. Si
llega un pulso de reloj mientras el interruptor esta en estado “ON”, este es ignorado.
En la figura 51 se representa un Control de Corriente Máxima (CCM), donde la
corriente esta limitada a una referencia fija. En este proyecto se ha configurado la señal
clock, mediante los periodos de la función rampa. Haciendo uso del forzado se observa que
la corriente al comienzo de cada ciclo conmuta a la topología ON, y si el valor de la
corriente alcanza al valor máximo establecido por la referencia, conmuta a la topología
OFF.
95
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Fig. 51. Control Corriente Máxima con referencia fija.
Se puede observar como el interruptor permanece en “OFF” hasta el comienzo del
siguiente ciclo. Si llega un pulso de reloj mientras el interruptor esta en estado “ON”, este
es ignorado tal y como ocurre para el pulso de reloj 16.
Por otro lado el simulador SIMSCP permite la variación de la señal de referencia en
función de la tensión de salida, de la funcion rampa o de ambas a la vez. En la figura 52 se
representa un CCM con aportación de tensión.
Fig. 52. CCM con aportación de señal de salida.
96
SIMSCP - Simulador Convertidores Dc-Dc
•
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Forzar OFF
Para poder llevar a cabo este tipo de forzado, se añade al control PWM un biestable
tipo RS, donde su entrada S(Set) es conectada a la salida del comparador, su entrada
R(Reset) es a la señal de reloj y su salida Q(quit) es la señal de conmutación que actúa
sobre el interruptor. El esquema del diagrama del control de corriente, es mostrado en la
figura siguiente.
Fig. 53. Diagrama del Forzado “ON”
En este modo control de corriente, el controlador especifica el valor mímimo de la
corriente del inductor. La corriente del inductor es comparada con una corriente de
referencia, la cual realiza el Set del Biestable. De manera más exacta, el interruptor S es
desactivado “OFF” a cada comienzo de ciclo (t=nT, n ∈ N y T el periodo de reloj) y
activado “ON” cuando el valor de la corriente del inductor alcanza a la referencia
prefijada. El interruptor permanecerá en “ON” hasta el comienzo del siguiente ciclo. Si
llega un pulso de reloj mientras el interruptor esta en estado “OFF”, este es ignorado.
En la figura 54 se representa un Control de Corriente mínima (CCM), donde la
corriente esta limitada a una referencia fija. En este proyecto se ha configurado la señal
clock, mediante los periodos de la función rampa. Haciendo uso del forzado se observa que
la corriente al comienzo de cada ciclo conmuta a la “topología OFF”, y si el valor de la
corriente alcanza al valor mínimo establecido por la referencia, conmuta a la “topología
OFF”.
97
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Fig. 54. Control Corriente mínima con referencia fija.
Se puede observar como el interruptor permanece en “ON” hasta el comienzo del
siguiente ciclo. Si llega un pulso de reloj mientras el interruptor esta en estado “OFF”,
este es ignorado tal y como ocurre para el pulso de reloj 1.
El simulador SIMSCP permite la variación de la señal de referencia en función de la
tensión de salida, de la funcion rampa o de ambas a la vez. En la figura 55 se representa un
CCm con aportación de tensión.
Fig. 55. CCM con aportación de señal de salida.
98
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Por otro lado, para el modo control de corriente, una buena regulación requiere que la
tensión de salida intervenga en la señal de realimentación. Además se añade una rampa
compensadora para estabilizar a una orbita periódica. El esquema general de este control se
representa en la figura siguiente.
Fig. 56. Esquema general del control para el forzado.
7.3.5.- La Perturbación
El simulador SIMSCP ofrece la oportunidad de poder introducir una perturbación del
tipo escalón en cualquier variable del sistema, tanto del propio convertidor como del lazo
de control. Con este detalle se permite estudiar el comportamiento del sistema frente a
posibles variaciones de sus parámetros.
Para su configuración se dispone de un control tipo popup menu, donde el usuario
selecciona la variable a modificar. Este listado presenta variaciones según el tipo de
convertidor que se simule. También contiene dos button tipo edit, con los cuales se le
permite introducir el periodo de activación de la perturbación, y el nuevo valor a adoptar
por el parámetro.
99
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
En la validación de los valores se comprueba que el periodo de activación de la
perturbación sea menor al número de ciclos total a simular, en caso de ser superior se avisa
al usuario mediante un mensaje de error.
Una perturbación que tiene aplicación en caso raso real, es variar la resistencia de
carga del convertidor. Se ha configurado el simulador SIMSCP, de tal manera que la
resistencia de carga varie su valor de R = 22Ω (Orbita Periódica) a R = 500Ω en el
periodo de simulación 20. En la figura 57 se representa el comportamiento de dicha
perturbación.
Fig. 57. Representación de la perturbación de la resistencia de carga.
Como se puede observar la dinámica periódica se mantiene hasta el periodo donde la
resistencia de carga sufre la perturbación. A partir de este, la dinámica deja de ser
periódica mostrando el comportamiento a esta perturbación.
Otra de las posibles pertubaciones del simulador SIMSCP es la de poder variar
cualquier señal. Por ejempo, en la figura 58 se representa la perturbación sufrida por la
señal rampa, donde al variar su amplitud de Vu = 8.2V (Orbita Periódica) a Vu = 12V en el
periodo de activación 10, se observa como la dinámica periódica se mantiene hasta el
periodo donde la señal rampa sufre la perturbación.
100
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Fig. 58. Efecto de la perturbación al variar Vu.
7.3.6.- Tensión de Entrada
La tensión de entrada utilizada por el simulador se compone principalmente por dos
componentes: una componente continua y una alterna. Antes de ser aplicada al convertidor
es introducida a un bloque rectificador de onda completa, tal y como se puede observar en
la figura 59.
Fig. 59. Representación de la tensión de entrada en un convertidor Buck.
La expresión que describe la tensión de entrada es la siguiente:
Vin = Vdc + K ·sen(ωt ) (70)
101
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
De esta manera se permite al usuario definir una tensión de entrada en función a sus
necesidades. Ya que haciendo uso de la constante de excitación K le permite obtener una
tensión continua, una tensión senoidal rectificada pura o combinación de ambas.
Desde la “Pantalla de configuración”, se permite mediante el control button tipo edit,
ajustar los siguientes parámetros relacionados con la tensión de entrada:
-
edit “Vdc”, permite al usuario introducir el valor de continua de la tensión de
entrada.
-
edit “Kex”, (constante de excitación), define el grado de aportación de la
componente senoidal rectificada en la señal de entrada.
-
edit “F(Hz)”, asigna la frecuencia de la senoidal en la tensión de entrada. Esta
frecuencia será multiplicada por el factor 2·π para obtener la frecuencia
angular.
Debido a que la frecuencia de conmutación del convertidor es normalmente mucho
mayor a la frecuencia de la tensión de entrada, se puede considerar que las variaciones de
la tensión de entrada debidas a la componente alterna, son nulas durante un periodo de
simulación. De esta forma la tensión de entrada permanecerá constante durante el periodo
de conmutación del convertidor.
En la figura 60 se demuestra dicho efecto, donde se ha configurado la tensión de
entrada con una frecuencia, f = 100Hz y la señal rampa con un periodo T = 200µs . En esta
representación hay que hacer notar los escalones producidos por la tensión de entrada
utilizada por el simulador, siendo en la realidad de menor amplitud y con un mayor ajuste a
la tensión de entrada real.
102
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Fig. 60. Representación de la tensión de entrada
En la representación anterior la señal de color azul pertene a la tensión de entrada, y la
señal escalonada de color rojo, a la tensión utilizada por el programa durante la simulación.
Se puede observar como la tensión de entrada utilizada por el simulador es practicamente
constante durante cada ciclo de simulación.
En la expresión de la señal de control se introduce un nuevo componente, K vin ·Vin , con
el cual se permite hacer variar la señal de control en función de la tensión de entrada. Por
lo que la expresión de la señal de control resultante para los convertidores de segundo
orden queda de la siguiente forma:
[
Vcont = a· K V ·(V − V ref ) + K i ·(i − I ref ) + K int ·s + K vin ·Vin
]
(71)
Y para los convertidores de cuarto orden:
[
Vcont = a· K V 1 ·(V C1 − V ref 1 ) + K V 2 ·(VC 2 − V ref 2 ) + K i1 ·(i L1 − I ref 1 ) + K i 2 ·(i L 2 − I ref 2 ) + K int ·s + K vin ·Vin
]
(72)
7.3.7.- Estabilizadores
Los diferentes regimenes de funcionamiento punto de equilibrio, periódico y cuasiperiódico fueron identificados y clasificados desde los primeros días de la electrónica. En
103
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
cambio, la existencia de otros comportamientos de estado permanente en circuitos
electrónicos solo ha sido conocida en los últimos años.
Tradicionalmente, los comportamientos inusuales en las ciencias físicas eran descritos
como extraños, a pesar de que matemáticamente sus fundamentos ya estaban
especificados.
Actualmente, el comportamiento caótico se define intuitivamente como aquel estado
estacionario limitado que no es un punto de equilibrio, ni es periódico, ni cuasi-periódico.
Recientemente, diferentes estrategias se han estudiado para sacar un sistema dinámico de
su regimen caótico y llevarlo a trabajar en un regimen periódico podiendo de esta manera
estabilizar la dinámica del sitema.
El Simulador SIMSCP, ofrece la oportunidad de utilizar dos estabilizadores: TDAS
(Time Delay AutoSynchronization) y la estabilización mediante el cambio del valor de
algun parámetro cada ciclo. En este proyecto se utilizará como parámetro a cambiar la
Amplitud de la señal diente de sierra.. Cada uno de ellos son explicados en los siguientes
apartados.
7.3.7.1 TDAS (Time-Delay Auto Synchronization)
Un método que permite la supresión del régimen caótico en los sistemas dinámicos no
lineales es el de la autosincronización mediante el uso de muestras retardas o control TDAS
(Time-Delay Auto Syncronization) [19].
En un convertidor DC-DC clásico, el control PWM se consigue comparando la señal
de control con una señal en rampa de periodo T. El control TDAS añade a la señal de
control otra señal VTDAS (t ) , que es una combinación lineal de las diferencias entre la
tensión del condensador y la corriente en la bobina actuales v(t) e i(t), con la tensión y
corriente que había un tiempo “τ ” anterior, v(t − τ ) e i (t − τ ) .
El tiempo “τ ” es el retardo TDAS y ha de ser un múltiplo del periodo de la rampa. Se
llama control TDAS de orden k aquel en que “τ ” es igual a k·T.
104
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Para los convertidores de segundo orden la señal VTDAS (t ) es la siguiente:
VTDAS (t ) = η·[α ·(v(t ) − v(t − τ )) + β ·(i (t ) − i (t − τ ))] (73)
Donde α (ganancia adimensional TDAS) y β (resistencia TDAS) son los pesos
correspondientes a la tensión y a la corriente, y donde η es un factor de amplificación
adimensional como a los dos sumandos.
En un convertidor DC-DC PWM dotado de un modulador de periodo T, la propiedad
fundamental del control TDAS de orden k, es que suprime cualquier dinámica preexistente
(caótica, periódica o cuasiperiódica), y genera una dinámica periódica estable de periodo
kT, si se cumplen dos condiciones:
a)
que, en el convertidor sin TDAS, coexista con la dinámica estacionaria, una
dinámica periódica inestable de periodo kT.
b)
Que los parámetros α y β del control TDAS de orden k tengan valores
adecuados, es decir, que pertenezcan a una cierta región del espacio de
parámetros llamada región de control de orden k. Cuanto mayor es k, mas
pequeña es la región de control.
La expresión VTDAS (t ) , es añadida a la expresión de control, con la que informa del
ajuste a realizar para lograr ajustar las variables de estado a sus respectivas consignas o
referencias. Cuanto mayor sea el número de muestras por ciclo, mejor será la estabilización
producida por el TDAS.La señal VTDAS (t ) puede incluir la integral del error. De este modo
la expresión a optar es la siguiente:
VTDAS (t ) = η·[α ·(v(t ) − v(t − τ )) + β ·(i (t ) − i (t − τ )) + γ ·( s (t ) − s (t − τ ))] (74)
Observando las expresiones (73) y (74), se puede apreciar la necesidad de ajustar las
constantes: η , α , β y γ . Por lo que en la “Pantalla de configuración”, se presenta una
sección donde se pueden ajustar dichas constantes mediante button del tipo edit, y
105
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
seleccionar mediante checkbox el TDAS con control integral. Dentro de esta sección
también se permite ajustar mediante button tipo edit, el periodo de activación. En el caso
de introducir un periodo de activación superior al número total de ciclos a simular, se
avisará al usuario mediante un mensaje de error.
De la misma forma que se define la señal VTDAS (t ) para los convertidores de segundo
orden, se puede describir para los convertidores de cuarto orden. Al existir cuatro variables
de estado la expresión incrementa el número de componentes:
VTDAS (t ) = η·[α 1 ·(vC1 (t ) − vC1 (t − τ )) + β1 ·(i L1 (t ) − i L1 (t − τ )) + ...
+ α 2 ·(vC 2 (t ) − vC 2 (t − τ )) + β 2 ·(i L 2 (t ) − i L 2 (t − τ ))]
(75)
Esta señal VTDAS (t ) también puede incluir la integral del error. De este modo la
expresión a optar es la siguiente:
VTDAS (t ) = η·[α 1 ·(vC ! (t ) − vC1 (t − τ )) + β 1 ·(i L1 (t ) − i L1 (t − τ )) + ...
+ α 2 ·(vC 2 (t ) − vC 2 (t − τ )) + β 2 ·(i L 2 (t ) − i L 2 (t − τ )) + ... (76)
+ γ ··(s (t ) − s (t − τ ))]
Observando las expresiones (75) y (76), se puede apreciar la necesidad de ajustar las
constantes: η , α 1 , β 1 ,α , 2 β 2 y γ . Por lo que en la “Pantalla de configuración”, se presenta
una sección donde se pueden ajustar dichas constantes mediante button del tipo edit y de
igual forma seleccionar mediante el checkbox el TDAS con control integral. Para estos
convertidores también se permite ajustar el periodo de activación mediante control button
tipo edit.
Una vez explicado el estabilizador TDAS, se pueden describir las expresiones de
control globales utilizadas por el algoritmo de cálculo, para cada uno de los tipos de
convertidores posibles son las siguientes:
-
En el caso del estabilizador TDAS sin control integral:
106
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Vcont (t ) = Vcont (t ) + VTDAS (t ) + V ENTRADA (t ) (77)
-
En el caso del estabilizador TDAS con control integral:
Vcont (t ) = Vcont (t ) + VTDAS + INTEGRAL (t ) + V ENTRADA (t ) (78)
En las figuras siguientes se ilustra el efecto del estabilizador TDAS frente a
comportamientos inestables. En la figura 61 se representa un posible comportamiento de
los convertidores, donde se observa una dinámica inestable.
Fig. 61. Comportamiento inestable del convertidor.
Ajustando el estabilizador TDAS con los siguientes parámetros se obtiene el
comportamiento representado en la figura 62.
rho=0.5
alpha=0.15
beta=-4.5
gamma=4 [19].
107
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Fig. 62. Actuación del estabilizador TDAS.
Como se puede observar antes del periodo de activación del estabilizador presenta una
dinámica inestable o caótica, es a partir de este (en el periodo 20), cuando el TDAS actúa
para obtener una dinámica estable o controlada en el régimen estacionario.
7.3.7.2 Estabilizacion de la dinam ica cambiando la Amplitud de Rampa ciclo a ciclo
Otro método que permite la supresión del régimen caótico en los sistemas dinámicos
no lineales es el de la variación del valor de algún parámetro, por ejemplo la amplitud de
la señal diente de sierra.
Este tipo de estabilizador se basa en la modificación del parámetro Vu de la rampa,
para cada ciclo de simulación. La expresión que determina dicha modificación es la
siguiente:
vu = Vu − K ·( X fin ciclo − X Orbita Periodica ) (79)
Donde Vu es el valor introducido desde la “Pantalla de configuración”, Xfin ciclo es el
vector con las variables de estado a final de ciclo y XOrbita Periodica es el vector de variables
de estados que determina la posible orbita periódica para los correspondientes parámetros
introducidos en la “Pantalla de configuración”.
108
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
La función switchinc, mediante un algoritmo de calculo proporciona el valor de las
variables de estados que determinan la posible orbita periódica, al final (o al principio) de
un ciclo, para los parámetros dados en la pantalla de configuración. Estas variables son
calculadas al inicio de la simulación y utilizadas durante todo el programa.
Para hacer depender esta modificación de cualquier variable de estado se introduce el
vector columna K donde el número de constantes contenidas es igual al número de
variables de estados del convertidor seleccionado.
De este modo mediante controles button del tipo edit, se introducen los
correspondientes valores de las diferentes constantes que componen dicho vector. El
número de controles edit, vendrá determinado por el orden del convertidor a simular. En
este estabilizador también se permite ajustar el tiempo de activación, controlando que este
no supere al número de ciclos totales a simular.
Un modo de poder ilustrar el efecto de este estabilizador es el mostrado en las figuras
siguientes. En la figura 63 se representa un comportamiento donde la dinámica tiende a
una topología determinada. Se puede apreciar como la amplitud de la rampa es constante
durante toda la simulación.
Fig. 63. Comportamiento de una dinámica especial.
109
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Activando el estabilizador en el periodo 20, se obtiene el comportamiento
representado en la figura 64.
Fig. 64. Actuación del estabilizador Amplitud de Rampa.
Se puede observar como el estabilizador hace variar la ampliud de la rampa de tal
forma poder controlar la dinámica del sistema. Un detalle importante de este estabilizador
es que a pesar de las variaciónes posibles de la amplitud, en el régimen estacionario o
permanente, la rampa vuelve a su amplitud fijada previamente.
7.4.- Pantalla de representación
Una vez realizada la simulación se accede a la “Pantalla principal de
representación”. Esta pantalla es construida mediante la función simulbuck. En ella se
definen una serie de controles uicontrol, [push-button, radio-button, checkbox,..] a través
de los cuales el usuario puede representar las variables del sistema, como activar o
desactivar las diferentes funciones ofrecidas por el Simulador.
Según el tipo de convertidor a simular (segundo o cuarto orden) esta pantalla
presentará una serie de modificaciones debido a la complejidad del circuito (variables de
estado). Para ilustrar su contenido se ha escogido la “Pantalla principal de
representación” para los convertidores de segundo orden, la cual es representada en la
figura 65.
110
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Fig. 65. Pantalla principal de representación para los convertidores de segundo orden.
En esta pantalla mediante la función de aplicación axes, se define la dimensión de los
ejes donde se representarán las variables y los posibles diagramas.
La utilización de axes sirve para controlar el escalado y la apariencia de los ejes de
referencia (definir las unidades de distancia). La simulación dinámica depende de estos
ejes creados al inicio de la función, siendo todos los gráficos posteriores “hijos” de este.
Después de definir-acotar el espacio de la simulación, se diseña la implementación del
interface de usuario. A partir de los cuales se ofrece una gran variedad de representaciones
como pueden ser:
-
Representación del Espacio de estados.
-
La realización del Diagrama de Bifurcación.
-
Representación de la Sección de Poincaré.
-
Representación de las variables del sistema.
111
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Todas estas representaciones son tratadas en los apartados siguientes. A continuación
se describen las funciones ofrecidas por la “Pantalla principal de representación”,
indiferentemente del tipo de convertidor.
Esta pantalla ofrece una serie de push button, los cuales hacen referencia al estado de
los ejes. El push button “zoom”, asociado al comando zoom, se encarga con la ayuda del
ratón proporcionar una herramienta para aumentar la representación en aquellas zonas que
sean de interés. La limitación de esta herramienta viene determinada por la precisión del
propio Matlab.
El push button “Borrar” y el push button “Restaurar”, presentan una función similar
ya que los dos controles permiten limpiar el grafico de representación. La diferencia
existente es que el push button “Borrar” solamente permite borrar las representaciones
realizadas en los ejes, mientras que el push button “Restaurar” no tan solo borra las
representaciones sino que posiciona los ejes a su estado inicial o por defecto. Este control
es de gran utilidad una vez que se haya realizado una representación tridimensional (3D).
El push button “Rotar”, asociado al comando rotate, permite al usuario con la ayuda
del ratón posicionar los ejes de la forma que se desee. Este control inhabilita el push button
“zoom”, ya que de esta forma se evita que la gráfica se vaya fuera de los límites prefijados.
Una vez accionado el push button “Restaurar”, se permite nuevamente el uso del zoom.
Una opción de gran utilidad es la de permitir ajustar el rango de los ejes. Esta
herramienta se consigue mediante el push button “Ajustar Ejes”, que asociado a la función
axlimdlg visualiza una pantalla donde se permite la modificación del escalado de los ejes
independientemente del estado en que se encuentren (bidimensional o tridimensional).
El push button “Grid”, asociado al comando grid permite la activación o
desactivación de la cuadricula de los ejes. Mediante el push-button “Imprimir”, asociado a
la función printdlg, se ofrece la posibilidad de imprimir las diferentes representaciones
realizadas.
112
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Desde esta pantalla se permite guardar o cargar simulaciones realizadas con
anterioridad, mediante el push-button “*.mat>” asociado a la función fiherosmat.
Para satisfacer las necesidades del usuario, el simulador presenta tres pantallas de
representación adicionales donde el único detalle que las diferencia es en el número de
axes(): dos, tres y cuatro gráficos. Esta opción es de gran importancia cuando el usuario
desee comparar diferentes representaciones al mismo tiempo.
El push button “Plot2graf”, asociado a la función plot2graf permite el acceso a la
pantalla de dos gráficos (axes). Esta función se encarga de crear la “Pantalla Plot2graf”,
representada en la figura 66, y cerrar la “Pantalla principal de representación”.
Fig. 66. Representación de la “Pantalla Plot2graf”.
Cada una de estas pantallas son accesibles desde la “Pantalla principal de
representación”, las cuales pueden ser seleccionas mediante sus respectivos push button.
En todas ellas se permite la representación de las variables, Plano de Estados y la Sección
de Poincaré, ya que son las representaciones más comunes a ser comparadas.
113
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Cada uno de los ejes presenta los mismos push button, que para el descrito en la
“Pantalla principal de representación”. La única diferencia presentada es la utilización de
un control tipo checkbox “Activa”, con el que se determina cual de los ejes es el activo
para poder realizar las representaciones correspondientes.
De la misma manera el push button “Plot3graf”, asociado a la función plot3graf
permite el acceso a la pantalla de tres gráficos (axes). Esta función se encarga de crear la
“Pantalla Plot3graf”, representada en la figura 67, y cerrar la “Pantalla principal de
representación”.
Fig. 67. Representación de la “Pantalla Plot3graf”.
El push button “Plot4graf”, asociado a la función plot4graf permite el acceso a la
pantalla de cuatro gráficos (axes). Esta función se encarga de crear la “Pantalla
Plot4graf”, representada en la figura 68, y cerrar la “Pantalla principal de
representación”.
114
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Fig. 68. Representación de la “Pantalla Plot4graf”.
Por último en cada una de las diferentes pantallas de representación existe un marco
de cuatro push-button, donde el usuario selecciona la siguiente operación a realizar por el
simulador SIMSCP. A continuación se describen cada una de las acciones asociadas a los
diferentes controles:
-
El push-button “Volver”: Permite al usuario volver a la “Pantalla de
configuración”, donde puede modificar cualquier valor de parámetro o ajuste
del control.
-
El push-button “Ayuda”: De manera interactiva el simulador ofrece al usuario
la información necesaria para poder hacer uso de las opciones ofrecidas por el
simulador.
-
El push-button “Salir”, asociado a la función quit permite al usuario la salida
directa del simulador SIMSCP, cerrando así la pantalla en que se encuentre en
ese momento: “Pantalla principal de representación”, “plot2graf”,”plot3graf”
o “plot4graf”.
115
SIMSCP - Simulador Convertidores Dc-Dc
-
E.T.S.E : ELECTRÓNICA INDUSTRIAL
El push-button “Volver al Menú Principal”, asociado a la función menu
permite al usuario volver a la pantalla “Menú Principal”, cerrando así la
“Pantalla principal de configuración”.
7.4.1.- Representación de Variables
La representación de las variables se realiza mediante controles del tipo radio button,
popup menu y push button. A través de los radio button se determinan las variables a
representar, con los diferentes popup menu, se confirman el tipo de color y el estilo de
línea, y con el push button “Representar”, se ejecuta la orden de representación. En la tabla
siguiente se representa un listado con todas las opciones del tipo de color y del estilo de
línea permitido en el simulador.
Tabla.1. Colores, markers y estilo de línea.
La representación se permite tanto en función del tiempo como en función de los
periodos. Para ello se dispone de los controles radio button “F(T)” y radio button “F(t)”.
El push button “Representar”, asociado a la función dibujar(xx,xa,xb) se encarga de
realizar el plot en función de la variable y el tipo de representación seleccionado. Esta
función presenta tres argumentos de entrada, con los cuales se le indica la variable a
representar (xx), el color (xa) y el tipo de línea (xb).
Por otra parte el simulador también permite la representación de la Transformada
discreta de Fourier (FFT) de cualquier variable. Para ello se dispone de los controles radio
button “FFT” y radio button “stem”.
116
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Si se activan algunos de los controles anteriores el push button “Representar”, se
asocia a la función dibujar2(xx,xa,xb,xc), el cual se encarga de realizar y representar la
FFT, en función de la variable y el tipo de representación seleccionado. Esta función
presenta cuatro argumentos de entrada, con los cuales se le indica la variable a representar
(xx), el color (xa), el tipo de línea (xb) y la representación mediante pulsos (xc). A través
del comando fftshift se mueve la componente continua al centro del espectro.
Como se ha podido observar el push button Representar, se asocia a la función dibujar
o bien dibujar2, dependiendo del radio button seleccionados.
7.4.2.- Plano/Espacio de Estados
El estado de un sistema dinámico es el conjunto de variables (llamadas variables de
estado) que con su conocimiento en el instante to conjuntamente con el conocimiento de la
entrada para t>to determinan el comportamiento del sistema en cualquier instante t>to.
Esta definición es buena para sistemas lineales. Para sistemas no lineales la definición
seria la misma con la importante diferencia de que la determinación del estado inicial tiene
que ser con una precisión infinita con tal de poder predecir su estado.
Ahora podemos definir el espacio de estados como el espacio n-dimensional donde sus
ejes coordenados representan las variables de estado. De esta manera el estado del sistema
vendrá determinado por un punto en este espacio de estados, y el espacio de estados será la
representación de todos los posibles estados del sistema.
Desde la “Pantalla principal de Representación”, se permite representar el “Espacio
de Estados”. En la figura 69 se observa la sección donde el usuario puede ajustar las
diferentes opciones que determinan dicha representación:
Fig. 69. Activacion del espacio de estados
117
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
La activación del Espacio de Estados se realiza mediante el radio Button, “Espacio de
Estados”. Mediante popup menu, se selecciona las variables a representar con el orden
x,y,z. Cada uno de estos popup menu, contienen las variables de estado y la variable
tiempo, permitiendo así cualquier combinación a ser representada. Este listado varia según
el convertidor que se esté simulando debido al número de variables de estado.
Dentro de esta sección se observa el push-button, “Opciones”, a través del cual se
accede a las opciones mostradas en la figura siguiente:
Fig. 70. Opciones del Espacio de Estados
Las opciones presentadas para este tipo de representación es la de poder eliminar el
régimen transitorio, el cual se activa seleccionando el checkbox, “Eliminar Transitorio” e
indicando el periodo a partir del cual se considera el régimen estacionario. Para introducir
dicho valor se utiliza un control button tipo edit, donde en la validación se comprueba que
no supere al número de periodos totales a simular.
La representación del Plano de Estados, se permite desde las diferentes pantallas de
representación: plot2graf, plot3graf y plot4graf. En las cuales la activación se realiza
mediante el radio Button, “Plano de Estados”.
En los sistemas no-lineales puede haber varios conjuntos limite distintos cada uno con
su correspondiente cuenca de atracción o conjunto de condiciones iniciales que convergen
hacia ese estado final.
De esta forma, cuando el convertidor ha superado el transitorio inicial de regulación
pueden darse tres tipos de estados estacionarios:
118
SIMSCP - Simulador Convertidores Dc-Dc
•
-
Solución periódica.
-
Solución cuasi-periódica.
-
Comportamiento caótico.
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Soluciones periódicas
Un sistema no-autónomo tiene soluciones periódicas si para algún T>0 se cumple:
θ t ( x * , t o ) = θ t +T ( x * , t o ) (80)
Un sistema no-autónomo con soluciones periódicas presenta ciclos limite en el espacio
de estado cilíndrico cuando es convertido en un sistema autónomo. Este periodo T mínimo
es a su vez un múltiplo K del periodo de la señal externa de control (Vramp) y entonces se
podrá hablar de solución fundamental si K=1 o de subarmónicos de orden-K si K>1.
En la figura 71 se representa el plano de estado para una orbita periódica.
Fig. 71. Plano de estados de una orbita periódica.
El simulador SIMSCP, permite visualizar el plano de estado de manera tridimensional,
llamándose ahora “Espacio de Estados”. Eligiendo una correcta configuración para las
diferentes variables que lo componen, se puede visualizar tal y como se representa en la
figura 72.
119
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Fig. 72. Representación del Espacio de Estados
•
Soluciones cuasi-periódicas
Una solución cuasi-periódica puede ser expresada como suma de un número contable
de funciones periódicas. En los convertidores analizados podrían darse situaciones 2periodicas, lo que quiere decir que la solución cuasi-periódica es descrita por dos
frecuencias inconmensurables que forman una base entera y finita:
f i = k1 f1 + k 2 f 2 (81)
Una posible demostración de una orbita cuasi-periodica es la mostrada en la figura
siguiente.
Fig. 73. Plano de estados de una Orbita Cuasi-Periodica.
120
SIMSCP - Simulador Convertidores Dc-Dc
•
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Comportamiento Caótico
El comportamiento caótico se puede definir como un estado estacionario acotado que
no corresponde ni a un punto de equilibrio, ni a una solución periódica, ni tampoco a una
cuasi-periódica. En los convertidores, la dinámica caótica exhibe tanto multiconmutaciones
como ciclos muertos o ciclos sin conmutación alguna [10].
La zona del espacio donde queda confinada esta complicada trayectoria se denomina
Atractor Extraño. Este atractor extraño es un ente de geometría complicada cuya estructura
es análoga a un conjunto de Cantor y cuya dimensión fractal es no-entera. En la figura 74
se representa el plano de estados de una dinámica caótica.
Fig. 74. Plano de estados de una dinámica Caótica.
La dinámica caótica también exhibe sensibilidad a las condiciones iniciales. Una
perturbación infinitesimal es amplificada con el tiempo hasta el punto de producirse una
total incorrelación entre la trayectoria fiducial y la perturbada.
7.4.2.1 Curva Característica
A partir del modelo promediado del convertidor se puede obtener el vector de estado,
donde sus componentes normalizadas son la tensión del condensador y la corriente del
inductor para un valor determinado del ciclo de trabajo.
Los puntos de equilibrio de estas variables de estado se pueden obtener de la siguiente
condición: X& (t ) = 0 .
121
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Por lo tanto cumpliendo dicha condición, a partir del modelo promediado se pueden
conocer, las relaciones entre la corriente y tensión normalizadas correspondientes al punto
de equilibrio.
Esta serie de puntos corresponde a una curva en el plano de estados, la cual se
denomina “Curva Característica (CC)”. En su representación se pueden observar los
diferentes ciclos límites para diferentes valores del ciclo de trabajo.
El simulador SIMSCP, permite la representación de las CC de los convertidores Buck,
Boost, Buck-Boost, las cuales son comentadas a continuación. Las CC de los restantes
convertidores no han sido objetivo en el desarrollo del presente proyecto.
•
Curva Característica del Convertidor Buck
Para el desarrollo de la curva característica del convertidor Buck, se ha tenido que
obtener su modelo promediado, tal y como se describe en las ecuaciones (82).
dVC
R
1
·i L
·VC +
= −
dt
(R + RC )·C
(R + RC )·C
di L
R·RC i L Vin
R
· +
·VC − R SL +
·d
= −
dt
R + RC L
L
(R + RC )·L
(82)
Tal y como se ha descrito anteriormente, para determinar los puntos de equilibrios se
di
dVc
= 0 y L = 0 . Obteniendo el sistema
debe cumplir la condicion: X& (t ) = 0 , es decir:
dt
dt
de ecuaciones siguiente.
0 = −VC + R·i L
0 = − R·VC − [R SL ·(R + RC ) + R·RC ]·i L + Vin ·( R + RC )·d
(83)
Para la representación de la CC, es necesario determinar los valores máximo y
mínimos de la corriente.
122
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
El máximo valor de corriente se obtiene del sistema de ecuaciones (83), cuando d=1.
Por lo tanto, substituyendo el valor de d se obtienen las siguientes ecuaciones.
VC = R·i L
0 = − R·VC − [R SL ·(R + RC ) + R·RC ]·i L + Vin ·( R + RC )
(84)
Substituyendo el valor de Vc, resulta la expresión:
0 = − R 2 ·i L − [R SL ·(R + RC ) + R·RC ]·i L + Vin ·( R + RC )
iL =
Despejando la variable corriente (iL):
(85)
Vin ·( R + RC )
R + [RSL ·(R + RC ) + R·RC ]
(86)
2
Del mismo modo el valor mínimo de corriente, se obtiene del sistema de ecuaciones
(83) haciendo d=0. Por lo tanto, substituyendo el valor de d se obtienen las siguientes
ecuaciones.
VC = R·i L
0 = − R·VC − [R SL ·(R + RC ) + R·RC ]·i L
(87)
Substituyendo el valor de Vc, se obtiene:
0 = − R 2 ·i L − [R SL ·(R + RC ) + R·RC ]·i L
De donde se afirma que:
iL = 0
(88)
(89)
Una vez conocidos los valores extremos de la corriente, se debe extraer del sistema de
ecuaciones (83), una expresión en la que se exprese la Vc=f(iL). De manera directa se
obtiene la siguiente relación:
VC = R·i L (90)
123
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
En la figura 75 se representa la curva característica del Convertidor Buck, donde se
puede observar que es una linea recta.
Fig. 75. Curva Característica del Convertidor Buck.
•
Curva Característica del Convertidor Boost
Para el desarrollo de la curva característica del convertidor Boost, se ha tenido que
obtener su modelo promediado, tal y como se describe en las ecuaciones (91).
dVC
R
1
·i L ·(1 − d )
·VC +
= −
dt
(R + RC )·C
(R + RC )·C
R·(1 − d )
di L
R·RC
R ·d
·VC − SL ·i L − R SL +
= −
dt
R + RC
L
(R + RC )·L
i L ·(1 − d ) Vin
·
+
L
L
(91)
Tal y como se ha descrito anteriormente, para determinar los puntos de equilibrios se
di
dVc
= 0 y L = 0 . Obteniendo el sistema
debe cumplir la condicion: X& (t ) = 0 , es decir:
dt
dt
de ecuaciones siguiente.
0 = −VC + R·i L ·(1 − d )
0 = − R·VC ·(1 − d ) − [RSL ·(R + RC )·i L ·d ] − [RSL ·(R + RC ) + R·RC ]·i L ·(1 − d ) + Vin ·( R + RC )
(92)
Para la representación de la CC, es necesario determinar los valores máximo y
mínimos de la corriente.
124
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
El máximo valor de corriente se obtiene del sistema de ecuaciones (92), cuando d=1.
Por lo tanto, substituyendo el valor de d se obtienen las siguientes ecuaciones.
Vc = 0
0 = −[R SL ·(R + RC )·i L ] + Vin ·( R + RC )
Rescribiendo la segunda ecuación se obtiene:
Despejando la corriente (iL): i L =
(93)
[RSL ·(R + RC )·i L ] = Vin ·(R + RC )
Vin ·( R + RC ) Vin
=
RSL ·(R + RC ) RSL
(94)
(95)
Del mismo modo el valor mínimo de corriente, se obtiene del sistema de ecuaciones
(92) haciendo d=0. Por lo tanto, substituyendo el valor de d se obtienen las siguientes
ecuaciones.
VC = R·i L
0 = − R·VC − [R SL ·(R + RC ) + R·RC ]·i L + Vin ·( R + RC )
(96)
Substituyendo el valor de Vc y rescribiendo nuevamente la ecuación se obtiene la
expresión siguiente:
R 2 ·i L + [R SL ·(R + RC ) + R·RC ]·i L = Vin ·( R + RC )
iL =
Despejando la corriente( iL):
Vin ·( R + RC )
R + [RSL ·(R + RC ) + R·RC ]
2
(97)
(98)
Una vez conocidos los valores extremos de la corriente, se debe extraer del sistema de
ecuaciones (92), una expresión en la que se exprese la Vc=f(iL). La manera de obtener
dicha relación es despejando el ciclo de trabajo.
d =1−
VC
(99)
R·i L
125
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
y substituyéndolo en la expresión
0 = − R·VC ·(1 − d ) − [RSL ·(R + RC )·i L ·d ] − [RSL ·(R + RC ) + R·RC ]·i L ·(1 − d ) + Vin ·( R + RC )
(100)
donde se obtiene
V
R ·(R + RC )·VC [R SL ·(R + RC ) + R·RC ]·VC
0 = − C − R SL ·(R + RC )·i L + SL
−
+ Vin ·( R + RC )
iL
R
R
2
(101)
Rescribiendo la expresión se puede observar que se obtiene una ecuación de segundo
orden.
2
VC
+ RC ·VC = Vin ·( R + RC ) − R SL ·(R + RC )·i L (102)
iL
VC + RC ·VC ·i L − Vin ·i L ·( R + RC ) + R SL ·(R + RC )·i L = 0 (103)
2
2
Siendo la variable incógnita la tensión del condensador se obtiene la siguiente
solución, la cual nos proporciona la expresión que relaciona la Vc=f(iL).
VC =
− RC ·i L ±
(RC ·i L )2 − 4·(RSL ·(R + RC )·i L 2 − Vin ·i L ·(R + RC ))
2
(104)
En la figura 76 se representa la curva característica del convertidor Boost, donde se
puede observar su forma de parábola.
126
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Fig. 76. Curva Característica del Convertidor Boost.
•
Curva Característica del Convertidor Buck-Boost
Para el desarrollo de la curva característica del convertidor Buck-Boost, se ha tenido
que obtener su modelo promediado, tal y como se describe en las ecuaciones (105).
dVC
R
1
·i L ·(1 − d )
·VC +
= −
dt
(R + RC )·C
(R + RC )·C
R·(1 − d )
di L
R·RC
R ·d
·VC − SL ·i L − R SL +
= −
dt
R + RC
L
(R + RC )·L
(105)
i L ·(1 − d ) Vin
·
·d
+
L
L
Tal y como se ha descrito anteriormente, para determinar los puntos de equilibrios se
di
dVc
= 0 y L = 0 . Obteniendo el sistema
debe cumplir la condicion: X& (t ) = 0 , es decir:
dt
dt
de ecuaciones siguiente (106).
0 = −VC + R·i L ·(1 − d )
0 = − R·VC ·(1 − d ) − [R SL ·(R + RC )·i L ·d ] − [R SL ·(R + RC ) + R·RC ]·i L ·(1 − d ) + Vin ·( R + RC )·d
Para la representación de la CC, es necesario determinar los valores máximo y
mínimos de la corriente.
El máximo valor de corriente se obtiene del sistema de ecuaciones (106), cuando d=1.
Por lo tanto, substituyendo el valor de d se obtienen las siguientes ecuaciones.
127
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Vc = 0
0 = −[R SL ·(R + RC )·i L ] + Vin ·( R + RC )
Rescribiendo la segunda ecuación se obtiene:
Despejando la corriente (iL): i L =
(107)
[RSL ·(R + RC )·i L ] = Vin ·(R + RC )
Vin ·( R + RC ) Vin
=
RSL ·(R + RC ) RSL
(108)
(109)
Del mismo modo el valor mínimo de corriente, se obtiene del sistema de ecuaciones
(106) haciendo d=0. Por lo tanto, substituyendo el valor de d se obtienen las siguientes
ecuaciones.
VC = R·i L
0 = − R·VC − [R SL ·(R + RC ) + R·RC ]·i L
(110)
Substituyendo el valor de Vc y rescribiendo nuevamente la ecuación se obtiene la
expresión siguiente:
R 2 ·i L + [R SL ·(R + RC ) + R·RC ]·i L = 0
Despejando la corriente (iL): i L = 0
(111)
(112)
Una vez conocidos los valores extremos de la corriente, se debe extraer del sistema de
ecuaciones (106), una expresión en la que se exprese la Vc=f(iL). La manera de obtener
dicha relación es despejando el ciclo de trabajo.
d =1−
VC
(113)
R·i L
y substituyéndolo en la expresión
128
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
0 = − R·VC ·(1 − d ) − [R SL ·(R + RC )·i L ·d ] − [R SL ·(R + RC ) + R·RC ]·i L ·(1 − d ) + Vin ·( R + RC )·d
(114)
donde se obtiene:
VC
V
− R SL ·(R + RC )·i L − RC ·VC + Vin ·( R + RC )·1 − C (115)
iL
R·i L
2
0=−
Rescribiendo la expresión se puede observar que se obtiene una ecuación de segundo
orden.
VC
V ·( R + RC )·VC
+ RC ·VC + in
= Vin ·( R + RC ) − R SL ·(R + RC )·i L (116)
iL
R·i L
2
R·VC + VC ·[RC ·R·i L + Vin ·( R + RC )] − Vin ·i L ·R·( R + RC ) + R SL ·R·(R + RC )·i L = 0 (117)
2
2
Siendo la variable incógnita la tensión del condensador se obtiene la siguiente
solución, la cual nos proporciona la expresión que relaciona la Vc=f(iL).
VC =
− [RC ·R·i L + Vin ·( R + RC )] ±
(RC ·R·i L + Vin ·( R + RC ))2 − 4·R·(RSL ·R·(R + RC )·i L 2 − Vin ·i L ·R·(R + RC ) ) (118)
2·R
En la figura 77 se representa la curva característica del Convertidor Buck-Boost,
donde se puede observar su forma de parábola.
Fig. 77. Curva Característica del Convertidor Buck-Boost.
129
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
7.4.2.2 Banda de regulación
De manera general las conmutaciones del interruptor vienen determinadas por la
comparación de la señal de control (implementada mediante una combinación no lineal de
las variables de estado), con una señal rampa (determinada por los valores Vu y VL.).
Dicha comparación puede incorporar una histéresis tal y como se describe en la
expresión (119).
cont·a·[kv·(v − Vref ) + ki·(i − Iref )] <> Vramp ± Vh (119)
Observando que las conmutaciones entre los diferentes estados posibles del
convertidor estan relacionados con las variables de estado (v,i), estas condiciones de
conmutación pueden ser representadas en el plano de estados, llamándose “Banda de
Regulación”. Dicha representación determina los limites de conmutación y refleja las
topologías de funcionamiento del convertidor.
Para poder representar las respectivas bandas, se tiene en cuenta las posibles
comparaciones a adoptar (120).
Vu
VL
cont·a·[kv·(v − Vref ) + ki·(i − Iref )] =
(120)
Vu + Vh
V − Vh
L
A continuación se describe el procedimiento para la obtención de las coordenadas que
determinan las diferentes rectas que componen la “banda de regulación”.
•
Recta producida por la componente Vu:
De la igualdad: cont·a·[kv·(v − Vref ) + ki·(i − Iref )] = Vu , se obtienen las siguientes
coordenadas.
Haciendo v=0
i=
(Vu cont·a ) + kv·Vref + ki·Iref
ki
(121)
130
SIMSCP - Simulador Convertidores Dc-Dc
Haciendo i=0
•
E.T.S.E : ELECTRÓNICA INDUSTRIAL
v=
(Vu cont·a ) + kv·Vref + ki·Iref
kv
(122)
Recta producida por la componente VL:
De la igualdad: cont·a·[kv·(v − Vref ) + ki·(i − Iref )] = V L , se obtienen las siguientes
coordenadas.
Haciendo v=0
Haciendo i=0
VL
cont·a + kv·Vref + ki·Iref
i=
(123)
ki
V L
cont·a + kv·Vref + ki·Iref
v=
(124)
kv
En la figura 78 se representan las dos rectas descritas anteriormente. Esta
representación es valida si ki y kv son diferentes de cero.
(Vucont·a)+ kv·Vref + ki·Iref
ki
(VLcont·a)+ kv·Vref + ki·Iref
ki
VL
kvVref + ki·Iref
cont·a + ·
kv
(
)
Fig. 78. Banda de Regulación para
Vu
kvVref + ki·Iref
cont·a + ·
kv
(
ki ≠ 0 y kv ≠ 0
)
131
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
De forma muy similar se obtienen las dos rectas que definen la banda de regulación en
el caso de existir Histéresis.
•
Recta producida por la componente Vu+Vh:
De la igualdad:
cont·a·[kv·(v − Vref ) + ki·(i − Iref )] = Vu + Vh , se obtienen las
siguientes coordenadas.
•
Haciendo v=0
i=
Haciendo i=0
v=
(Vu + Vh cont·a ) + kv·Vref + ki·Iref
ki
(Vu + Vh cont·a ) + kv·Vref + ki·Iref
kv
(125)
(126)
Recta producida por la componente VL-Vh:
De la igualdad:
cont·a·[kv·(v − Vref ) + ki·(i − Iref )] = V L − Vh , se obtienen las
siguientes coordenadas.
Haciendo v=0
Haciendo i=0
V L − Vh
+ kv·Vref + ki·Iref
cont·a
i=
(127)
ki
V L − Vh
+ kv·Vref + ki·Iref
cont·a
v=
(128)
kv
La representación de estas dos rectas son semejantes a las de la figura 78, la única
diferencia existente estan en las nuevas coordenadas obtenidas del análisis. Como se puede
observar estas rectas sufren variaciones en el caso de que las constantes ki y kv adopten
valores nulos, es decir: ki = 0 y kv = 0 .
132
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
En el caso de que ki = 0 , las nuevas coordenadas de las diferentes rectas son las
siguientes.
•
Recta producida por la componente Vu:
De la igualdad: cont·a·[kv·(v − Vref ) + ki·(i − Iref )] = Vu , se obtienen las siguientes
coordenadas.
Haciendo v =
Haciendo v =
•
(Vu cont·a ) + kv·Vref
kv
(Vu cont·a ) + kv·Vref
kv
i = i MÁXIMA (129)
i = i MÍNIMA (130)
Recta producida por la componente VL:
De la igualdad: cont·a·[kv·(v − Vref ) + ki·(i − Iref )] = V L , se obtienen las siguientes
coordenadas.
V L
cont·a + kv·Vref
Haciendo v =
kv
V L
cont·a + kv·Vref
Haciendo v =
kv
i = i MÁXIMA (131)
i = i MÍNIMA (132)
En la figura 79 se representan las dos rectas descritas anteriormente. En esta
representación se puede observar como las rectas son verticales y limitadas al valor
máximo y mínimo de corriente en cada momento.
133
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
máxima
mínima
(VLcont·a)+ kv·Vref (Vucont·a)+ kv·Vref
kv
kv
Fig. 79. Banda de Regulación para ki=0.
•
Recta producida por la componente Vu+Vh:
De la igualdad:
cont·a·[kv·(v − Vref ) + ki·(i − Iref )] = Vu + Vh , se obtienen las
siguientes coordenadas.
Haciendo v =
Haciendo v =
•
(Vu + Vh cont·a ) + kv·Vref
kv
(Vu + Vh cont·a ) + kv·Vref
kv
i = i MÁXIMA (133)
i = i MÍNIMA (134)
Recta producida por la componente VL-Vh:
De la igualdad:
cont·a·[kv·(v − Vref ) + ki·(i − Iref )] = V L − Vh , se obtienen las
siguientes coordenadas.
V L − Vh
+ kv·Vref
cont·a
Haciendo v =
kv
i = i MÁXIMA (135)
134
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
+ kv·Vref
V L − Vh
cont·a
Haciendo v =
kv
i = i MÍNIMA (136)
La representación de estas dos rectas son semejantes a las de la figura 79, la única
diferencia existente estan en las nuevas coordenadas obtenidas del análisis.
En el caso de que kv = 0 , las nuevas coordenadas de las diferentes rectas son las
siguientes.
•
Recta producida por la componente Vu:
De la igualdad: cont·a·[kv·(v − Vref ) + ki·(i − Iref )] = Vu , se obtienen las siguientes
coordenadas.
Haciendo v = v MÁXIMA
Haciendo v = v MÍNIMA
•
i=
i=
(Vu cont·a ) + ki·Iref
ki
(Vu cont·a ) + ki·Iref
ki
(137)
(138)
Recta producida por la componente VL:
De la igualdad: cont·a·[kv·(v − Vref ) + ki·(i − Iref )] = V L , se obtienen las siguientes
coordenadas.
Haciendo v = v MÁXIMA
Haciendo v = v MÍNIMA
VL
cont·a + ki·Iref
i=
(139)
ki
VL
cont·a + ki·Iref
i=
(140)
ki
135
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
En la figura 80 se representan las dos rectas descritas anteriormente.
(Vucont·a)+ ki·Iref
ki
(VLcont·a)+ ki·Iref
ki
mínima
máxima
Fig. 80. Banda de Regulacion para kv=0.
En esta representación se puede observar como las rectas son horizontales y limitadas
al valor máximo y mínimo de tensión en cada momento.
•
Recta producida por la componente Vu+Vh:
De la igualdad:
cont·a·[kv·(v − Vref ) + ki·(i − Iref )] = Vu + Vh , se obtienen las
siguientes coordenadas.
•
Haciendo v = v MÁXIMA
i=
Haciendo v = v MÍNIMA
i=
(Vu + Vh cont·a ) + ki·Iref
ki
(Vu + Vh cont·a ) + ki·Iref
ki
(141)
(142)
Recta producida por la componente VL-Vh:
De la igualdad:
cont·a·[kv·(v − Vref ) + ki·(i − Iref )] = V L − Vh , se obtienen las
siguientes coordenadas.
Haciendo v = v MÁXIMA
V L − Vh
+ ki·Iref
cont
·
a
i=
ki
(143)
136
SIMSCP - Simulador Convertidores Dc-Dc
Haciendo v = v MÍNIMA
E.T.S.E : ELECTRÓNICA INDUSTRIAL
+ ki·Iref
V L − Vh
cont·a
i=
ki
(144)
La representación de estas dos rectas son semejantes a las de la figura (80), la única
diferencia existente estan en las nuevas coordenadas obtenidas del análisis.
7.4.3.- Sección de Poincaré
La aplicación de Poincaré es una herramienta de análisis de los sistemas dinámicos. Su
característica principal es transformar un sistema continuo de orden n en un sistema
discreto de orden n-1. Constituye, por tanto, el puente entre los sistemas continuos y los
discretos.
Para el sistema no-autónomo transformado en uno autónomo con una periodicidad T
igual a la de la señal rampa, la aplicación de Poincaré consiste en definir en el espacio de
estado cilíndrico, un plano de intersección de fase constante. Dicho de forma sencilla: se
muestrean las variables de estado cada periodo de la rampa.
Al hacer uso de la aplicación de Poincaré, las soluciones del sistema continuo se
transforman en soluciones del sistema discreto. La correspondencia entre soluciones del
estado estacionario de ambos sistemas es la siguiente:
Sistema continuo
Sistema discreto
Ciclo Límite de periodo nT
n puntos
Toro 2-periódico
Curva cerrada
Caos
Nube de puntos
La representación de la solución de la aplicación de Poincaré de una trayectoria se
denomina sección de Poincaré puesto que visualiza los puntos de intersección con el plano
de fase constante. También se puede definir otro tipo de plano que no esté relacionado con
la fase.
137
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Por ejemplo, se puede visualizar los puntos de conmutación o cambio de topología sin
mas que tomar la tensión de la rampa como plano de intersección.
Desde la “Pantalla principal de Representación”, se permite representar la “Sección
de Poincaré”. En la figura 81 se observa la sección donde el usuario puede ajustar las
diferentes opciones que determinan dicha representación:
Fig. 81. Activación de la Sección de Poincaré
La activación de la Sección de Poincaré se realiza mediante el radio Button, “Sección
Poincaré”. Mediante button tipo edit, se indican el número de cambios de topología
producidos durante la simulación. Mediante el uso de checkbox se determina la posición
del eje tensión, el cual determina el eje de la corriente.
En el caso de los convertidores de cuarto orden, la sección donde el usuario puede
ajustar las diferentes opciones se ve modificada debido al número de variables de estado tal
y como se representa en la figura siguiente.
Fig. 82. Activación de la Sección de Poincaré
Al existir cuatro variables de estado, se permite representar la Seccion de Poincaré en
función de cualquier variable mediante dos controles tipo popup menu. Cada uno de ellos
hace referencia a una coordenada, por lo que se asignan las variables a cada una de ellas.
138
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Dentro de esta sección se observa el push-button, “Opciones Poincaré”, a través del
cual se accede a las opciones mostradas en la figura siguiente:
Fig. 83. Opciones de Poincaré.
Las opciones presentadas para este tipo de representación es la de poder eliminar el
régimen transitorio, el cual se activa seleccionando el checkbox, “Eliminar Transitorio” e
indicando la muestra a partir del cual se considera el régimen estacionario. Para introducir
dicho valor se utiliza un control button tipo edit, donde en la validación se comprueba que
no supere al número de muestras de cambio de topología totales.
Por otro lado, para la realización de la Seccion de Poincaré se presenta una serie de
checkbox con los cuales el usuario puede determinar el tipo de muestra a utilizar. Cada uno
de ellos son explicados a continuación.
-
Muestra tn. Cambio Topología (on-off|off-on): Permite realizar la sección de
Poincaré con las muestras del cambio de topología producidas durante la
simulación.
-
Muestra fin ciclo: Realiza la sección utilizando las muestras de las variables de
estado a final de ciclo.
-
Muestra on-off: Con esta opción se permite seleccionar solamente las muestras
producidas por el cambio de topología de ON a OFF.
-
Muestra off-on: De la misma manera esta permite seleccionar solamente las
muestras producidas por el cambio de topología de OFF a ON.
139
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Los dos últimos checkbox: “Muestra on-off” y “Muestra off-on” son de gran interés
cuando se realice una simulación con Histéresis, ya que permiten realizar la “Seccion de
Poincaré” utilizando las muestras de cualquier cambio de topología.
A parte de todas estas opciones se presenta un control button tipo edit con el cual se
permite seleccionar cualquier muestra dentro del periodo, comprobando que esta muestra
se encuentre dentro del número total de muestras introducidas desde la “Pantalla de
Configuración”.
Para que las diferentes opciones tengan efecto se debe accionar el push button,
“Cerrar”, encargado de volver a la “Pantalla principal de Representación”.
Tal y como se ha comentado en este apartado la Sección de Poincaré de una orbita nT
periódica se convierte en una representación de n puntos. A continuación se muestra la
Seccion de Poincaré de una dinámica caótica [7],[9] resultando el Atractor Extraño en la
figura 84.
Fig. 84. Seccion de Poincare de un Atractor Extraño.
El simulador SIMSCP permite la representación de la Sección de Poincaré para las
diferentes posiciones de la tensión y corriente. En la figura 85 se representa el anterior
Atractor pero intercambiando las variables de posición [10].
140
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Fig. 85. Seccion de Poincare invertida de un Atractor Extraño.
La Seccion de la figura 86 se ha obtenido haciendo uso del flip-flop, quedando
inhibidas las multiconmutaciones. Se observa que esta medida no elimina en absoluto el
comportamiento caótico, y que incluso puede llegar a forzar su aparición ya que elimina la
posibilidad de aparición de ciclos límite estables con conmutaciones [9].
Fig. 86. Seccion de Poincare de un Atractor Extraño evitando multiconmutaciones.
141
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Por otro lado el atractor extraño que aparece con el uso del flip-flop es más grande en
tamaño, lo cual supone mayor rizado de tensión y corriente. El uso del flip-flop evita la
reducción del rendimiento del convertidor cuando se produce dinámica caótica a costa de
empeorar considerablemente su dinámica.
Se observa que cuando la dinámica es caótica, ciertas regiones del espacio de fases son
visitadas con una cierta regularidad y en absoluto otras. Esta complicada
estructura
geométrica denominada Atractor Extraño, corresponde a un estado estacionario cuya
cuenca de atracción es todo el plano de estados.
7.4.4.- Diagrama de Bifurcación
En muchos sistemas dinámicos en los que aparece caos al variar un parámetro, previo
a este comportamiento hay una secuencia de bifurcaciones. Partiendo de un sistema cuyo
atractor es un ciclo limite, al variar el parámetro se producen cambios cualitativos en la
dinámica del sistema, llamados bifurcaciones, en los que se dobla el periodo del ciclo
limite, esto son las oscilaciones subharmonicas. A partir de un cierto valor del parámetro el
atractor ya es caótico [16].
La manera de representar el fenómeno de las bifurcaciones es mediante un “Diagrama
de Bifurcaciones”. Se hace un muestreo una variable de estado cada periodo de
conmutación una vez que se ha alcanzado el régimen estacionario. Este muestreo se realiza
para los diferentes valores de barrido del parámetro. Si la oscilación del sistema tiene un
periodo igual al de conmutación, todas las muestras caerán en el mismo punto, si es una
oscilación subharmonica habrá dos, cuatro o más puntos diferentes y si es caótico nunca se
repetirá la misma secuencia. Una representación de todas estas muestras en una misma
gráfica cuyo eje de abcisas es el parámetro cuya variación provoca las bifurcaciones, es un
“Diagrama de Bifurcaciones”.
Desde la “Pantalla principal de Representación”, se permite realizar el diagrama de
Bifurcación. En la figura 87 se observa la sección donde el usuario puede ajustar las
diferentes opciones que determinan el diagrama.
142
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Fig. 87. Ajuste de la Bifurcación.
La activación del diagrama de Bifurcación se realiza mediante el radio Button,
“Diagrama Bifurcacion”. La selección del parámetro a variar se selecciona mediante un
popup menu “Parametro”, donde contiene un listado de los parámetros más significantes
para realizar el barrido. Este listado varia según el convertidor que se esté simulando. Por
otra parte mediante button del tipo edit, se permite al usuario ajustar tanto los valores
máximo y mínimos del barrido del parámetro, como el incremento durante el intervalo.
Mediante el popup menu, “Representa”, se permite seleccionar la variable de estado a
representar en función del barrido del parámetro. Con esta opción, se permite representar el
diagrama de Bifurcación para cualquier variable de estado indiferentemente del parámetro
de barrido.
Dentro de esta sección se observan dos push-button: “Opciones Muestras” y
“Opciones Bifurcación”. Seleccionando el push-button: “Opciones Muestras”, se accede
a las opciones mostradas en la figura siguiente:
Fig. 88. Opciones Muestras de Bifurcación.
En esta sección se permite ajustar el tipo de muestra escogida para realizar el diagrama
de Bifurcación.
143
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Mediante el checkbox, “Muestra tn (Cambio Top)” de permite realizar el diagrama
con las muestras del cambio de topología producidas durante toda la simulación. Se
permite también realizar el diagrama de bifurcación mediante las muestras de las variables
de estado al final de ciclo, seleccionando así el checkbox, “Muestra fin de ciclo”. Por
ultimo, mediante un button tipo edit, se permite seleccionar la muestra deseada dentro del
periodo. En la validación se comprueba que la muestra seleccionada sea inferior al número
de muestras por periodo introducido desde la “Pantalla de configuración”, en caso
contrario se informa mediante un mensaje de error.
Otra de las opciones presente en esta sección es la poder eliminar el régimen
transitorio, mediante el checkbox, “Eliminar Transitorio”. Esta opción es valida para el
checkbox, “Muestra tn (Cambio Top)” ya que se elimina el transitorio indicando la
muestra de cambio deseada. Para los otros tipos de muestras, se permite el eliminar el
régimen transitorio dentro de las “Opciones Bifurcación”. Esta sección se cierra
accionando el push-button, “Cerrar” el cual realiza el set de las diferentes opciones y
volviendo a la “Pantalla principal de representación”.
Seleccionando el push-button: “Opciones Bifurcación”, se accede a las opciones
mostradas en la figura siguiente:
Fig. 89. Opciones de Bifurcación.
En esta sección se permite el ajuste de las condiciones iniciales para cada valor de
barrido del parámetro seleccionado. Cada una de ellas son seleccionadas mediante
checkbox, las cuales inhibe las restantes permitiendo así una sola activa. A continuación se
describen cada una de ellas:
144
SIMSCP - Simulador Convertidores Dc-Dc
-
E.T.S.E : ELECTRÓNICA INDUSTRIAL
“Condición Periodicidad para Min y Mantenida”: Esta opción asigna como
condiciones iniciales aquellas los valores de las variables de estado que
describen una orbita periódica para el valor min del parámetro de bifurcación.
Estas condiciones son mantenidas (las mismas) para cada valor de barrido de
este parámetro.
-
“Condición Periodicidad para Min y Actualizada”: Esta opción para el primer
valor de barrido del parámetro, asigna como condiciones iniciales los valores de
las variables de estado que describen una orbita periódica para el valor min del
parámetro de bifurcación. Siendo para los restantes valores de barrido, los
últimos valores de las variables de estado, ahí el nombre de “Actualizada”.
-
“Siempre condición Periodicidad”: Esta opción es la que requiere mayor
tiempo de procesado ya que para cada valor de barrido del parámetro encuentra
los valores de las variables de estado que describan una orbita periódica y las
asigna como condiciones iniciales.
En una larga simulación en la que se comienza en régimen estacionario y el parámetro
Vin se varía muy lentamente, el sistema va pasando de un régimen estacionario a otro,
siguiendo la evolución del atractor [7],[9]. Si muestreamos esta simulación cada periodo de
conmutación tendremos los datos del diagrama de bifurcaciones representado en la figura
90.
Fig. 90. Diagrama de Bifurcacion para un barrido de Vdc.
145
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
En la representación anterior se puede apreciar como partiendo de una dinámina
periódica, el hecho de variar el parámetro Vin provoca que la dinámica del sistema pase a
ser doblemente periódica, hasta que llega un cierto punto donde se estable el Caos.
En la figura 91 se representa una ampliación del Diagrama de Bifurcación anterior,
donde se pueden observar más claramente cada una de estas ramificaciones producidas
durante la simulación.
Fig. 91. Ampliación del Diagrama de Bifurcación
7.4.5.- Creación de ficheros .mat
Debido al uso del simulador se observó la necesidad de poder guardar y recuperar
simulaciones realizadas con anterioridad. De modo que para satisfacer las necesidades
requeridas por el usuario se optó por añadir al simulador una característica muy
importante, como es la capacidad de guardar y crear ficheros de datos.
Esta es una opción bastante común en los programas de simulación. Para ofrecer esta
capacidad se ha necesitado la ayuda de los ficheros .mat, que ofrece Matlab. Mediante el
push button, “.mat>” asociado a la función ficherosmat se accede a la pantalla de
“Ficheros .mat”.
146
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Fig. 92. Pantalla ficheros.mat
Dicha pantalla se divide en dos funciones principales: crear o guardar ficheros .mat.
Cada una de estas funciones son seleccionadas mediante controles tipo checkbox. Para
cada una de estas funciones se incluyen cinco radio button, los cuales determinan el
nombre del fichero a utilizar. Los nombres de los ficheros a elegir serán:
-
Simulacion1.mat
-
Simulacion2.mat
-
Simulacion3.mat
-
Simulacion4.mat
-
Simulacion5.mat.
Estos ficheros contienen toda la información requerida por la “Pantalla de
configuración”, que es la información suficiente para poder realizar nuevamente la
simulación.
Para guardar una simulación primeramente se debe de haber simulado, ya que la
creación de los ficheros se permite desde la “Pantalla principal de representación”. Una
vez encontrados en dicha pantalla se debe seleccionar push button, “.mat>” para poder
visualizar la pantalla “Ficheros.mat”.
147
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
En ella se selecciona el checkbox, “Crear Ficheros.mat”, junto con el radio button a
que hace referencia el nombre del fichero deseado.
Para que la creación del fichero se realice con éxito se debe accionar el push button,
“Cerrar”, el cual la finaliza creando el fichero.mat seleccionado, cerrando la pantalla
“Ficheros.mat”
y
volviendo
a
la
“Pantalla
principal
de
representación”.
Independientemente de la información contenida en dicho fichero, los datos serán
reemplazados por los de configuración de la actual simulación.
Si por el contrario se pretende recuperar una simulación realizada con anterioridad, el
checkbox a seleccionar es “Cargar ficheros.mat” desde la pantalla
“Ficheros.mat”.
Seleccionando también el radio button, que haga referencia al fichero.mat donde se guardó
la anterior simulación.
De la misma forma, para que la carga del fichero se realice con éxito se debe accionar
el push button, “Cerrar”, el cual la finaliza cargando el fichero.mat seleccionado, en el
espacio de trabajo del Matlab, cerrando la pantalla “Ficheros.mat” y volviendo a la
“Pantalla principal de representación”.
Una vez cargado el fichero.mat, lo último que se debe realizar es seleccionar el control
push button, “Volver” de la “Pantalla principal de representación”, con el que se vuelve a
la “Pantalla de configuración” con los valores específicos de la simulación realizada con
anterioridad.
7.4.6.- El Informe
El push button, “Informe”, se encarga de crear un listado de todos los parámetros y
controles que componen el sistema, con los datos aportados por el usuario en la “Pantalla
de configuración”.
Asociado a la función informe, a través del cual se accede a la pantalla “Información
parámetros del convertidor”.
148
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
El contenido de esta pantalla estará en función del orden del convertidor
seleccionado. En la figura 93 se muestra el Informe para uno de los convertidores de
segundo orden.
Esta pantalla dispone del push button, “Imprimir”, que a través de la función printdlg
(propia del Matlab), se encarga de presentar la pantalla de impresión a través de la cual el
informe puede ser impreso.
El push button, “Cerrar”, asociado al comando CLOSE de Matlab, se encarga de
cerrar la pantalla “Información parámetros del convertidor”, y volver a aquella donde fue
accionado el push button, “Informe”.
Fig. 93. Informe para el convertidor Buck.
149
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
8.- Simulaciones
A continuación se presentan una serie de simulaciones posibles realizadas por el
simulador SIMSCP. Primeramente se dará paso al fenómeno “Sliding”, producido en los
convertidores de potencia, por otro lado se presenta las diferentes opciones del “Control
con Histéresis” y por último una posible simulación de un “Corrector
factor de
Potencia”.
8.1.- La dinámica en modo deslizante “Sliding”
El control en modo de deslizamiento deriva de la teoría de sistemas con estructura
variable. Las técnicas aplicadas en este control, son por definición artilugios matemáticos
que permiten el análisis de sistemas en el dominio temporal [17].
El control en modo deslizante o Sliding permite fijar directamente en el dominio del
tiempo la respuesta deseada en lazo cerrado de un sistema de estructura variable.
En el control en modo deslizamiento no hay un reloj que fije ninguno de los instantes
de conmutación, que dependen completamente de las variables internas. El lugar
geométrico de los puntos del espacio de estados donde se produce la conmutación o
cambio de estructura, forma una superficie llamada superficie sliding o deslizante. Es un
subespacio de dimension n-1, siendo n el orden del convertidor y siempre es posible
definirla con una sola ecuación. Esta ecuación, funcion de las variables de estado, es la que
gobierna un comparador cuya señal de salida determina los intantes de comutacion.
Para que sea una verdadera superficie sliding, cuando el vector de estado llega a ella,
su trayectoria debe continuar contenida en la superficie, deslizándose hasta un punto de
equilíbrio. Idealmente en el modo de deslizamiento, para que la trayectoria esté realmente
sobre la superficie, la frecuencia de conmutación debe ser infinita.
En la figura 94 se representa el comportamiento Sliding en un convertidor Boost, junto
con su Curva Característica y la Banda de Regulación. Se aprecia como la dinámica del
sistema desliza por los límites de conmutación hasta situarse en el cilo limite.
150
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Fig. 94. Representacion de la dinámica Sliding en el Convertidor Boost
En la figura 95 se representa la ampliación de la zona remarcada por el cuadro, donde
se observa claramente la superficie de deslizamiento.
Fig. 95. Ampliación de la dinámica Sliding.
Haciendo uso de los recursos ofrecidos por el simulador SIMSCP, se puede realizar
una representación tridimensional del “Espacio de Estados”, figura 96, donde se permite
visualizar tanto el arranque del sistema como el deslizamiento producido.
151
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Fig. 96. Representación tridimensional de la dinámica Sliding.
8.2.- Control con Histéresis
La teoría de control demuestra que los reguladores pueden presentar dinámicas
especificas, denominadas refractivas y deslizantes. Si una orbita llega a una región
deslizante, el estado del regulador se desliza por ella conmutando a una frecuencia
teóricamente infinita, figura 97.
Detalle
Fig. 97. Convertidor conmutando a frecuencia elevada.
152
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Por lo que si se alcanza en ella un ciclo límite, este será de frecuencia de conmutación
infinita que, aunque en la práctica esta limitada por los tiempos de conmutación de los
interruptores, produce elevadas pérdidas de potencia que destruyen rápidamente el
interruptor por elevación de su temperatura.
Un método para impedir este fenómeno consiste en introducir una histéresis en el
comparador (regulación autónoma con histéresis) que produce a través del conjunto de
parámetros del regulador una dinámica periódica de periodo T [20]. Por lo tanto cuando el
control regule, variará tanto el periodo T de la dinámica como el ciclo de trabajo. Este tipo
de regulador recibe el nombre de “free running” o “autooscilantes”. En la figura 98 se
representa el control con histéresis.
Fig. 98. Representación del control con Histéresis.
En el control con Histéresis, se permite hacer variar sus limites tanto en función de la
tensión de salida, como de la tensión de entrada o de cualquier variable de estado. En la
figura siguiente se representa el control con Histéresis donde se introduce una pequeña
aportación de la tensión de salida.
153
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Detalle
Fig. 99. Representación del control con Histéresis.
Otra posible modificación de los límites que componen la banda de Histéresis es la de
poder hacerlos depender de una señal rampa, tal y como se representa en la figura
siguiente.
Fig. 100. Control con Histeresis con aportación de la señal rampa.
En la figura 101 se representa una simulación del control con Histéresis donde la
banda tiene aportación tanto de la señal rampa como de la tensión de salida.
154
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Fig. 101. Control con Histéresis con aportación de rampa y tensión de salida.
La anchura de la banda de histéresis establece la frecuencia de conmutación del
convertidor, tal y como se representa en la figura 102. Observando el detalle, se puede
apreciar como las conmutaciones quedan determinadas por la banda de histeresis.
Detalle
Fig. 102. Multiconmutaciones en el Control con histéresis.
155
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
El simulador SIMSCP, para este tipo de control permite disminuir la frecuencia de
conmutación, activando el Latch “Evitar Multiconmutaciones”. Observando la figura 103
se observa como la frecuencia de conmutación es menor a la de la figura 102.
Fig. 103. Control con histéresis y con Latch, “Evitar Multiconmutaciones”.
Realizando un control con Histéresis, el simulador SIMSCP permite igualmente la
activación de los Latch: “Forzar ON” y “Forzar OFF”. En la figura 104 se puede
observar el efecto del Latch "Forzar ON".
Fig. 104. Control con histéresis y con Latch, “Forzar ON”.
156
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Donde la corriente conmuta por la banda de histéresis pero si estando en la "Topología
OFF" llega un ciclo de reloj antes de que se produzca el alcance con la banda de histéresis,
este provoca el cambio a "Topología ON".
Si llega un pulso de reloj mientras el interruptor esta en estado "ON", este es ignorado.
En la figura 105 se puede observar el efecto del Latch "Forzar OFF", donde la
corriente conmuta por la banda de histéresis pero si estando en la "Topología ON" llega un
ciclo de reloj antes de que se produzca el alcance con la banda de histéresis, este provoca el
cambio a "Topología OFF". Del mismo modo, si llega un pulso de reloj mientras el
interruptor esta en estado "OFF", este es ignorado.
Fig. 105. Control con histéresis y con Latch, “Forzar OFF”.
Este Latch: “Forzar ON” y “Forzar OFF” nos permite aumentar la frecuencia de
conmutación en un control con histeresis.
8.3.- Corrector Factor de Potencia
Otras de las simulaciones posibles a realizar mediante el simulador SIMSCP, consiste
en los “Correctores del Factor de Potencia”. Tal y como se ha descrito en apartados
anteriores, la tensión de entrada se puede configurar como una señal puramente senosoidal.
157
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
En la figura 106 se representa tanto la propia tensión de entrada como la tensión
utilizada por el simulador (señal escalonada).
Fig. 106. Representación de la tensión de entrada.
El Corrector del Factor de Potencia consiste en hacer que la tensión y la corriente
esten en fase, provocando asi un mejor factor de potencia. Para lograr dicho efecto se
realiza un control de corriente donde su referencia varie en función de la tensión de
entrada. Haciendo uso del latch “Forzar ON”, se obtiene el control mostrado en la figura
107.
Fig. 107. Control de corriente para la realización del Corrector del
factor de Potencia.
158
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Observando la representación anterior se puede apreciar como mediante el control de
corriente se permite hacer variar la corriente a la misma frecuencia que la tensión de
entrada. En la figura 108 se presenta el plano de estados del presente comportamiento.
Fig. 108. Plano de estados para el Corrector del Factor de Potencia
Haciendo uso de las prestaciones ofrecidas por el simulador SIMSCP, se permite
representar el espacio de estado mostrado en la figura 109.
Fig. 109. Espacio de estados para el Corrector del Factor de Potencia
159
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
9.- Conclusiones
En este proyecto final de carrera se ha desarrollado un software en Matlab para la
simulación de Convertidores Dc-Dc, cumpliendo todos los objetivos marcados al inicio.
Este Simulador no es tan sólo una herramienta indispensable, para introducir de forma
didáctica al estudiante e investigador en el mundo de los Convertidores Dc-Dc, sino como
un paso intermedio entre el trabajo analítico y el montaje fisico del circuito.
SIMSCP presenta una interface a través de la cual permite al usuario, de una manera
cómoda y sencilla, configurar los diferentes parámetros que describen tanto el propio
convertidor como el lazo de control, con el fin de poder así comprobar su comportamiento
y estabilidad.
El simulador se caracteriza por trabajar directamente con las soluciones de las
ecuaciones diferenciales que describen el convertidor. El control establecido fuerza la
conmutación del circuito entre dos configuraciones, siendo el sistema de tipo VSS
(Variable Structure System). Para una mayor capacidad de simulación, permite también
poder simular el comportamiento discontinuo de los diferentes convertidores.
Dependiendo de las posibles configuraciones, mediante las diferentes representaciones
permite extraer diversas conclusiones sobre el comportamiento de la dinámina del sistema,
como por ejemplo la perdida de estabilidad debido al modo discontinuo o por el efecto de
la multiconmutaciones.
Una vez realizada la simulación permite una amplia variedad de representaciones,
comenzando por todas las variables que componen el sistema, hasta las diferentes
representaciones utilizadas en el ambito de la investigación como pueden ser el Diagrama
de Bifurcación, Sección de Poincaré y el Espacio o Plano de Estados.
En este simulador se han introducido los conceptos de Curva Característica y Plano de
Estados, los cuales son útiles para analizar el comportamiento de los ciclos límite de los
convertidores electrónicos Dc-Dc, con especial referencia a su carácter de estabilidad.
160
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Los diagramas de bifurcaciones proporcionan una gran cantidad de información que
puede ser utilizada para el diseño. Si se desea construir un convertidor que opere en la zona
de estabilidad, los parámetros deberán tomarse en la región de T-periodicidad; por otro
lado, si se desea realizar un diseño que proporcione un convertidor caótico, los valores de
los parámetros deberán estar en la región caótica. En ambos casos, se deberá tener en
cuenta la zona de inestabilidad.
En la realización de este proyecto se han tenido en cuenta todas las necesidades
requeridas por el usuario, por lo que se ha programado el simulador de tal forma que al
acceder a la pantalla de configuración de cada convertidor se encuentre los diferentes
parámetros con unos valores por defecto. De esta forma el usuario solamente modifica
aquellos valores que no se ajustan a su modelo.
También se ha tenido en cuenta la necesidad de poder representar simulaciones
realizadas con anterioridad, o el hecho de poder intercambiar simulaciones entre varias
personas (via internet) sin necesidad de enviar todo el programa. Simplemente surge la
necesidad de guardar los parámetros de configuración en un fichero.mat, desde donde se
realizará nuevamente la carga de estos.
Para poder ofrecer un mayor rendimiento, el simulador permite imprimir tanto las
diferentes representaciones realizadas en él, como el informe (listado de toda la
información de configuración del sistema), de esta manera se ofrece al usuario poder
archivar o trabajar los diferentes estudios realizados en el SIMSCP. Se ha podido
comprobar y verificar mediante diferentes artículos, que los resultados obtenidos con el
simulador SIMSCP son correctos.
Sería de gran interés centrar un estudio futuro en la ampliación del simulador donde se
permita la configuración de cualquier convertidor de potencia deseado independientemente
del orden del circuito, asi como ofrecer la posibilidad de realizar diagramas de
bifurcaciones 2-dimensionales.
161
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
10.- Bibliografía
[1] Hamill et al, 1992. “Analysis Simulation and Experimental study of Chaos in
the Buck Converter”. Proceedings IEEE Power Electronics Specialists Confrence,
San Antonio, pp. 491-498, 1992.
[2] Venkataramanan et al., 1985. “Sliding mode control of DC-DC Converters”
IECON’85 pp:251-258, 1985
[3] [Tse, 1994] “Chaos from a Buck Switching Regulator operating in
discontinuous mode”, International journal of Circuit Theory and Aplications
Vol.22, pp: 263-278, 1994.
[4] El Aroudi et al., 1999. “Hopf Bifurcation and Chaos from torus Breakdown in
a PWM Voltaje controlled DC-DC Boost Converter”, IEEE Transactions on
Circuits and Systems I, Vol 11, pp: 1374-1382, 1999
[5] El Aroudi et al., 2000. “Quasiperiodicity and Chaos in the DC-DC Buck-Boost
Converter”, International Journal of Bifurcation and Chaos, Vol 10, pp: 359-371,
2000.
[6] Abdelali El Aroudi, “Quasi-Periodic Route to Chaos in a PWM VoltajeControlled DC-DC Boost Converter”, IEEE Transactions on circuits and systems-I
fundamental theory and applications, vol 48, no 8, August 2001.
[7] Enric Fossas and Gerard Olivar, “Study of Chaos in the Buck Converter”,
IEEE transactions on circuits and Systems- I fundamental Theory and applications,
Vol-43, January 1996.
[8] Chung-Chieh Fang, “Exact orbital stability analysis of static and dynamic
ramp compensations in DC-DC Converters”, Logic library Dept. Taiwan
Semiconductor Manufacturing Co, Hsinchu 300, Taiwan.
162
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
[9] Sally Myles and Mario Di Bernardo, “Preventing multiple switchings in
Power Electronic Circuits: Effects of the Latch on the nonlinear Dynamics of the
DC-DC Buck Converter”, Departament of Engineering Mathematics, University of
Bristol, BS8 1TR 1999.
[10] Jonathan H.B Deane and David C. Hamill, “Analysis, Simulation and
experimental study of chaos in the buck converter”, Departament of Electronic and
Electrical Engineering, University of Surrey, Guildford GU2 5XH, Great Britain.
[11] Chung-Chieh Fang and Eyad H. Abed, “Sampled-Data Modeling and
Analysis of PWM DC-DC Converters Part I. Closed-Loop Circuits”, Departament
of Electrical Engineering and the institute for Systems Research.
[12] Chung-Chieh Fang and Eyad H. Abed, “Sampled-Data Modeling and
Analysis of PWM DC-DC Under Hysteretic Control”, Departament of Electrical
Engineering and the institute for Systems Research.
[13] Chung-Chieh Fang and Eyad H. Abed, “Analysis and Control of Period
Doubling Bifurcation in Buck Converters Using Harmonic Balance ”, Departament
of Electrical Engineering and the institute for Systems Research.
[14] D. Adar, G. Rahav and S. Ben-Yaakov, “A unified Behavioral Average
model of SEPIC Converters with coupled inductors”, Departament of Electrical
Engineering.
[15] Chung-Chieh Fang and Eyad H. Abed, “Feedback Stabilization of PWM
DC-DC Converters”, Departament of Electrical Engineering and the institute for
Systems Research.
[16] Chung-Chieh Fang and Eyad H. Abed, “Local Bifurcations in PWM DCDC Converters”, Departament of Electrical Engineering and the institute for
Systems Research.
163
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
[17] B.J. Cardoso Fo. And A.F. Moreira “Analysis of Switching Frequency
Reduction Methods Applied to Sliding Mode Controlled Dc-Dc Converters”.
Electrical University of Minas Gerais.
[18] Isaac Zafrany and Sam Ben-Yaakov “A Chaos Model of Subharmonic
Oscillations in Current Mode PWM Boost Converters”. Departament of Electrical
and Computer Engineering Ben-Gurion university of the Negev.
[19] D. Gastón, E. Toribio, C. Batlle, A. El Aroudi, J.A. Gorri. “Implementación
Digital de un control TDAS en un convertidor Buck con control PWM”.
[20] H.H.C Iu and C. K. Tse “A Study of Synchronization in Chaotic
Autonomous Cúk Converters”, Department of Electronic and Information
Engineering, The Hong Kong Polytechnic University, Hong Kong.
164
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
11.- Anexos
11.1.- Algoritmo de cálculo. Simuladorr.m
function simuladorr()
%*********************************************************
%simuladorr(). Es el algoritmo de calculo que procesa las
%
soluciones de las ecuaciones caracteristicas
%
%
% Dept d'Eng. Electrònica, Elèctrica, i Automàtica (DEEEA)
% Escola Tècnica Superior d'Enginyeria (ETSE)
% Universitat Rovira i Virgili (URV)
% Copyright (c) 2002
%*********************************************************
tic;
global timecpu
kk=0;
Vin=Vdc+K*abs(sin(2*pi*freq*kk*T));
if CONVERTIDOR==1 %Buck
if cont==-1
A1=[-1/((R+Rc)*C) R/((R+Rc)*C) 0;
-R/(L*(R+Rc)) -(Rs*(R+Rc)+(R*Rc))/(L*(R+Rc))
1 0 0];
A2=[-1/((R+Rc)*C) R/((R+Rc)*C) 0;
-R/(L*(R+Rc)) -(Rs*(R+Rc)+(R*Rc))/(L*(R+Rc))
1 0 0];
B1=[0; Vin/L; -Erroref];
B2=[0; 0; -Erroref];
else
A1=[-1/((R+Rc)*C) R/((R+Rc)*C) 0;
-R/(L*(R+Rc)) -(Rs*(R+Rc)+(R*Rc))/(L*(R+Rc))
1 0 0];
A2=[-1/((R+Rc)*C) R/((R+Rc)*C) 0;
-R/(L*(R+Rc)) -(Rs*(R+Rc)+(R*Rc))/(L*(R+Rc))
1 0 0];
B1=[0; 0; -Erroref];
B2=[0; Vin/L; -Erroref];
end
0;
0;
0;
0;
A3=[-1/((R+Rc)*C) 0 0; 0 0 0; 1 0 0];
B3=[0; 0; -Erroref];
elseif CONVERTIDOR==2 %Boost
if cont==-1
A1=[-1/((R+Rc)*C) 0 0; 0 -Rs/L 0; 1 0 0];
A2=[-1/((R+Rc)*C) R/((R+Rc)*C) 0;
-R/(L*(R+Rc)) -(Rs*(R+Rc)+(R*Rc))/(L*(R+Rc)) 0;
1 0 0];
B1=[0; Vin/L; -Erroref];
B2=[0; Vin/L; -Erroref];
else
A1=[-1/((R+Rc)*C) R/((R+Rc)*C) 0;
-R/(L*(R+Rc)) -(Rs*(R+Rc)+(R*Rc))/(L*(R+Rc)) 0;
1 0 0];
165
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
A2=[-1/((R+Rc)*C) 0 0; 0 -Rs/L 0; 1 0 0];
B1=[0; Vin/L; -Erroref];
B2=[0; Vin/L; -Erroref];
end
A3=[-1/((R+Rc)*C) 0 0; 0 0 0; 1 0 0];
B3=[0; 0; -Erroref];
elseif CONVERTIDOR==3 %BuckBoost
if cont==-1
A1=[-1/((R+Rc)*C) 0 0; 0 -Rs/L 0; 1 0 0];
A2=[-1/((R+Rc)*C) R/((R+Rc)*C) 0;
-R/(L*(R+Rc)) -(Rs*(R+Rc)+(R*Rc))/(L*(R+Rc)) 0;
1 0 0];
B1=[0; Vin/L; -Erroref];
B2=[0; 0; -Erroref];
else
A1=[-1/((R+Rc)*C) R/((R+Rc)*C) 0;
-R/(L*(R+Rc)) -(Rs*(R+Rc)+(R*Rc))/(L*(R+Rc)) 0;
1 0 0];
A2=[-1/((R+Rc)*C) 0 0; 0 -Rs/L 0; 1 0 0];
B1=[0; 0; -Erroref];
B2=[0; Vin/L; -Erroref];
end
A3=[-1/((R+Rc)*C) 0 0; 0 0 0; 1 0 0];
B3=[0; 0; -Erroref];
elseif CONVERTIDOR==4 %Cuk
if cont==-1
A1=[-1/((R+Rc2)*C2) R/((R+Rc2)*C2) 0 0 0;
-R/((R+Rc2)*L2)-(Rs2*(R+Rc2))+…
(R*Rc2)+(Rc1*(R+Rc2)))/((R+Rc2)*L2) 1/L2 0 0;
0 -1/C1 0 0 0;
0 0 0 -Rs1/L1 0;
1 0 0 0 0];
A2=[-1/((R+Rc2)*C2) R/((R+Rc2)*C2) 0 0 0;
-R/((R+Rc2)*L2) -((Rs2*(R+Rc2))+(R*Rc2))/((R+Rc2)*L2) 0 0 0;
0 0 0 1/C1 0;
0 -(Rc1+Rs1)/L1 -1/L1 0 0;
1 0 0 0 0];
B1=[0; 0; 0; Vin/L1; -Erroref];
B2=[0; 0; 0; Vin/L1; -Erroref];
else
A1=[-1/((R+Rc2)*C2) R/((R+Rc2)*C2) 0 0 0;
-R/((R+Rc2)*L2) -((Rs2*(R+Rc2))+(R*Rc2))/((R+Rc2)*L2) 0 0 0;
0 0 0 1/C1 0;
0 -(Rc1+Rs1)/L1 -1/L1 0 0;
1 0 0 0 0];
A2=[-1/((R+Rc2)*C2) R/((R+Rc2)*C2) 0 0 0;
-R/((R+Rc2)*L2) -((Rs2*(R+Rc2))+(R*Rc2)+…
+(Rc1*(R+Rc2)))/((R+Rc2)*L2) 1/L2 0 0;
0 -1/C1 0 0 0;
0 0 0 -Rs1/L1 0;
1 0 0 0 0];
166
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
B1=[0; 0; 0; Vin/L1; -Erroref];
B2=[0; 0; 0; Vin/L1; -Erroref];
end
A3=[-1/((R+Rc2)*C2) 0 0 R/((R+Rc2)*C2) 0;
R/((R+Rc2)*(L1+L2)) -(Rs1+Rc1+Rs2+…
+((R*Rc2)/(R+Rc2)))*(1/(L1+L2)) 1/(L1+L2) 0 0;
0 0 0 1/C1 0;
-R/((R+Rc2)*(L1+L2)) 0 -1/(L1+L2)(Rs1+Rc1+Rs2+((R*Rc2)/(R+Rc2)))*(1/(L1+L2)) 0;
1 0 0 0 0];
B3=[0; -(Vin/(L1+L2));0;(Vin/(L1+L2));-Erroref];
elseif CONVERTIDOR==5 %Sepic
if cont==-1
A1=[-1/((R+Rc2)*C2) 0 0 0 0;
0 -(Rs2+Rc1)/L2 1/L2 0 0;
0 -1/C1 0 0 0;
0 0 0 -Rs1/L1 0;
1 0 0 0 0];
A2=[-1/((R+Rc2)*C2) R/((R+Rc2)*C2) 0 R/((R+Rc2)*C2) 0;
-R/((R+Rc2)*L2) -((Rs2*(R+Rc2))+(Rc2*R))/((R+Rc2)*L2) 0 –
-(Rc2*R)/((R+Rc2)*L2) 0;
0 0 0 1/C1 0;
-R/((R+Rc2)*L1) -(R*Rc2)/((R+Rc2)*L1) -1/L1 –
-((Rs1*(R+Rc2))+(Rc1*(R+Rc2))+(R*Rc2))/((R+Rc2)*L1) 0;
1 0 0 0 0];
B1=[0; 0; 0; Vin/L1; -Erroref];
B2=[0; 0; 0; Vin/L1; -Erroref];
else
A1=[-1/((R+Rc2)*C2) R/((R+Rc2)*C2) 0 R/((R+Rc2)*C2) 0;
-R/((R+Rc2)*L2) -((Rs2*(R+Rc2))+(Rc2*R))/((R+Rc2)*L2) 0 –
-(Rc2*R)/((R+Rc2)*L2) 0;
0 0 0 1/C1 0;
-R/((R+Rc2)*L1) -(R*Rc2)/((R+Rc2)*L1) -1/L1 –
((Rs1*(R+Rc2))+(Rc1*(R+Rc2))+(R*Rc2))/((R+Rc2)*L1) 0;
1 0 0 0 0];
A2=[-1/((R+Rc2)*C2) 0 0 0 0;
0 -(Rs2+Rc1)/L2 1/L2 0 0;
0 -1/C1 0 0 0;
0 0 0 -Rs1/L1 0;
1 0 0 0 0];
B1=[0; 0; 0; Vin/L1; -Erroref];
B2=[0; 0; 0; Vin/L1; -Erroref];
end
A3=[-1/((R+Rc2)*C2) 0 0 0 0;
0 -(Rs1+Rc1+Rs2)*(1/(L1+L2)) 1/(L1+L2) 0 0;
0 -1/C1 0 1/C1 0;
0 0 -1/(L1+L2) -(Rs1+Rc1+Rs2)*(1/(L1+L2)) 0;
1 0 0 0 0];
B3=[0; -(Vin/(L1+L2));0;(Vin/(L1+L2));-Erroref];
elseif CONVERTIDOR==6 %Buck Filtro entrada
if cont==-1
A1=[-1/((R+Rc2)*C2) R/((R+Rc2)*C2) 0 0 0;
-R/((R+Rc2)*L2) -((Rs2*(R+Rc2))+(R*Rc2)+…
+(Rc1*(R+Rc2)))/((R+Rc2)*L2) 1/L2 Rc1/L2 0;
0 -1/C1 0 1/C1 0;
167
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
0 Rc1/L1 -1/L1 -(Rs1+Rc1)/L1 0;
1 0 0 0 0];
A2=[-1/((R+Rc2)*C2) R/((R+Rc2)*C2) 0 0 0;
-R/((R+Rc2)*L2) -((Rs2*(R+Rc2))+(R*Rc2))/((R+Rc2)*L2) 0 0 0;
0 0 0 1/C1 0;
0 0 -1/L1 -(Rs1+Rc1)/L1 0;
1 0 0 0 0];
B1=[0; 0; 0; Vin/L1; -Erroref];
B2=[0; 0; 0; Vin/L1; -Erroref];
else
A1=[-1/((R+Rc2)*C2) R/((R+Rc2)*C2) 0 0 0;
-R/((R+Rc2)*L2) -((Rs2*(R+Rc2))+(R*Rc2))/((R+Rc2)*L2) 0 0 0;
0 0 0 1/C1 0;
0 0 -1/L1 -(Rs1+Rc1)/L1 0;
1 0 0 0 0];
A2=[-1/((R+Rc2)*C2) R/((R+Rc2)*C2) 0 0 0;
-R/((R+Rc2)*L2) -((Rs2*(R+Rc2))+…
+(R*Rc2)+(Rc1*(R+Rc2)))/((R+Rc2)*L2) 1/L2 Rc1/L2 0;
0 -1/C1 0 1/C1 0;
0 Rc1/L1 -1/L1 -(Rs1+Rc1)/L1 0;
1 0 0 0 0];
B1=[0; 0; 0; Vin/L1; -Erroref];
B2=[0; 0; 0; Vin/L1; -Erroref];
end
A3=[-1/((R+Rc2)*C2) 0 0 0 0;
0 0 0 0 0;
0 0 0 1/C1 0;
0 0 -1/L1 -(Rs1+Rc1)/L1 0;
1 0 0 0 0];
B3=[0;0;0;Vin/L1;-Erroref];
elseif CONVERTIDOR==7 %Boost Filtro Salida
if cont==-1
A1=[-1/((R+Rc2)*C2) R/((R+Rc2)*C2) 0 0 0;
-R/((R+Rc2)*L2) ((-Rs2*(R+Rc2))-(R*Rc2)-(Rc1*(R+Rc2)))/((R+Rc2)*L2) 1/L2 0 0;
0 -1/C1 0 0 0;
0 0 0 -Rs1/L1 0;
1 0 0 0 0];
A2=[-1/((R+Rc2)*C2) R/((R+Rc2)*C2) 0 0 0;
-R/((R+Rc2)*L2) -((Rs2*(R+Rc2))+…
+(R*Rc2)+(Rc1*(R+Rc2)))/((R+Rc2)*L2) 1/L2 Rc1/L2 0;
0 -1/C1 0 1/C1 0;
0 Rc1/L1 -1/L1 -(Rs1+Rc1)/L1 0;
1 0 0 0 0];
B1=[0; 0; 0; Vin/L1; -Erroref];
B2=[0; 0; 0; Vin/L1; -Erroref];
else
A1=[-1/((R+Rc2)*C2) R/((R+Rc2)*C2) 0 0 0;
-R/((R+Rc2)*L2) -((Rs2*(R+Rc2))+(R*Rc2)+…
+(Rc1*(R+Rc2)))/((R+Rc2)*L2) 1/L2 Rc1/L2 0;
0 -1/C1 0 1/C1 0;
0 Rc1/L1 -1/L1 -(Rs1+Rc1)/L1 0;
168
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
1 0 0 0 0];
A2=[-1/((R+Rc2)*C2) R/((R+Rc2)*C2) 0 0 0;
-R/((R+Rc2)*L2) ((-Rs2*(R+Rc2))-(R*Rc2)-(Rc1*(R+Rc2)))/((R+Rc2)*L2) 1/L2 0 0;
0 -1/C1 0 0 0;
0 0 0 -Rs1/L1 0;
1 0 0 0 0];
B1=[0; 0; 0; Vin/L1; -Erroref];
B2=[0; 0; 0; Vin/L1; -Erroref];
end
A3=[-(R+Rc1)/((Rc1*(R+Rc2)+(Rc2*R))*C2) 0
R/((Rc1*(R+Rc2)+(Rc2*R))*C2) 0 0;
0 0 0 0 0;
R/((Rc1*(R+Rc2)+(Rc2*R))*C1) 0
-(R+Rc1)/((Rc1*(R+Rc2)+(Rc2*R))*C1) 0 0;
0 0 0 0 0;
1 0 0 0 0];
B3=[0;0;0;0;-Erroref];
end
DIM=length(A1);
DIMxo=length(x0);
DIMks=length(ks);
DIMXs=length(Xs);
DIMtcte=length(tcte);
t=0;
x=x0;
pp=x0;
x01=x0;
sta=[];
xT=x0;
ram=[];
k=1;
vr=0;
OPTIONS=[0,1e-6,1e-6,1e-6];
indice_muestra=10; %de 1...samples-1
ramp=[];
vcont=[];
iref=[];
periodos=[];
tiempo=[];
ventradap=[];
pwmf=[];
tp=0;
vu=Vu;
tensioncontrol=[];
b=1;i=1;j=1;g=1;d=1;
PWM=[];
on=1;
off=0;
flag1=0;
flag2=0;
corte=0;
primero=0;
169
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
down=0;
up=0;
c1=0;c2=0;c3=0;c4=0;c5=0;
muestra_tn=[];
muestra_onoff=[];
muestra_offon=[];
muestra_tnvh=[];
I=eye(length(A1));
if amplitud_rampa==1
%llamada duty
PARAM1=[Vin,R,L,C,Vl,Vu,T,Vref,ks(1),ks(2),a,Rs,cont,p,ks(3),
CONVERTIDOR, ks(4),ks(5)];
tn=fsolve('switchinc',T/4,OPTIONS,[],A1,A2,B1,B2,PARAM1);
phi1=phi(A1,tn);
phi2=phi(A2,T-tn);
psi1=psi(A1,B1,tn);
psi2=psi(A2,B2,T-tn);
inversa2=pinv(I-phi2*phi1);
inversa=pinv(I-phi1*phi2);
x01=inversa2*(phi2*psi1+psi2);
end
h = waitbar(0,'Procesando Simulacion...');
for kk=1:Numdeciclos;
Vin=Vdc+K*abs(sin(2*pi*freq*kk*T));
if (CONVERTIDOR<4)&(K~=0)
if CONVERTIDOR==2
B1=[0; Vin/L; -Erroref];
B2=[0; Vin/L; -Erroref];
else
if cont==-1
B1=[0;Vin/L;-Erroref];
B2=[0;0;-Erroref];
else
B1=[0;0;-Erroref];
B2=[0;Vin/L;-Erroref];
end
end
elseif (K~=0)
B1=[0; 0; 0; Vin/L1; -Erroref];
B2=[0; 0; 0; Vin/L1; -Erroref];
end
waitbar(kk/Numdeciclos,h)
x=xT;
semaforo=0;
uno=0;
ciclo=0;
for k=0:samples-1
phi1=phi(A1,inc);
phi2=phi(A2,inc);
psi1=psi(A1,B1,inc);
psi2=psi(A2,B2,inc);
170
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
phi3=phi(A3,inc);
psi3=psi(A3,B3,inc);
periodo=0;
xx=x;
xk=x;
if (amplitud_rampa==1)&(kk>=activa_ampli_ramp) %Amplitud de rampa
vu=Vu-amplicte*(xT-x01);
vr1=vramp(inc*(k),Vl,vu,T,p);
else
vr1=vramp(inc*(k),Vl,Vu,T,p);
end
if (tdas==1)&(kk>=activa_tdas) %TDAS
if (int_tdas==0)
if CONVERTIDOR<4
Iref1=vr1/(cont*a)+(ki*Ireferencia)-(kv*(x(1)-Vref))-(kint*(x(3)))-(Kvin*Vin)+rho*(alpha*(x(1)-pp(1,k+1))+beta*(x(2)-pp(2,k+1)));
vcontrol=cont*a*((kv*(x(1)-Vref))+(ki*(x(2)Ireferencia))+(kint*(x(3)))+(Kvin*Vin))...
+rho*(alpha*(x(1)-pp(1,k+1))+beta*(x(2)pp(2,k+1)));
ss=0;
else
Iref1=vr1/(cont*a)+(ki2*Ireferencia2)-(kv2*(x(1)Vref2))-(kv1*(x(3)-Vref1))-…
(ki1*(x(4)-Ireferencia1))-(kint*(x(5)))(Kvin*Vin)+rho*(alpha2*(x(1)-pp(1,k+1))+...
beta2*(x(2)-pp(2,k+1))+alpha1*(x(3)pp(3,k+1))+beta1*(x(4)-pp(4,k+1)));
vcontrol=cont*a*((kv2*(x(1)-Vref2))+(ki2*(x(2)Ireferencia2))+ (kv1*(x(3)-Vref1))+
(ki1*(x(4)-Ireferencia1))+(kint*(x(5)))
+(Kvin*Vin))
+rho*(alpha2*(x(1)-pp(1,k+1))+beta2*(x(2)pp(2,k+1))+alpha1*(x(3)-pp(3,k+1))...
+beta1*(x(4)-pp(4,k+1)));
if (CONVERTIDOR==4)|(CONVERTIDOR==5)
ss=x(4);
elseif (CONVERTIDOR==7)
ss=x(4)-x(2);
else
ss=0;
end
end
else
if CONVERTIDOR<4
Iref1=vr1/(cont*a)+(ki*Ireferencia)-(kv*(x(1)-Vref))(kint*(x(3)))-(Kvin*Vin)+...
rho*(alpha*(x(1)-pp(1,k+1))+beta*(x(2)pp(2,k+1))+gamma(x(3)-pp(3,k+1)));
vcontrol=cont*a*((kv*(x(1)-Vref))+(ki*(x(2)Ireferencia))+(kint*(x(3)))+(Kvin*Vin))...
+rho*(alpha*(x(1)-pp(1,k+1))+beta*(x(2)pp(2,k+1))+gamma(x(3)-pp(3,k+1)));
ss=0;
else
171
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
Iref1=vr1/(cont*a)+(ki2*Ireferencia2)-(kv2*(x(1)Vref2))-(kv1*(x(3)-Vref1))-...
(ki1*(x(4)-Ireferencia1))-(kint*(x(5)))(Kvin*Vin)+rho*(alpha2*(x(1)-pp(1,k+1))+...
beta2*(x(2)-pp(2,k+1))+alpha1*(x(3)pp(3,k+1))+beta1*(x(4)-pp(4,k+1))+gamma1*...
(x(5)-pp(5,k+1)));
vcontrol=cont*a*((kv2*(x(1)-Vref2))+(ki2*(x(2)Ireferencia2))+(kv1*(x(3)-Vref1))+
(ki1*(x(4)-Ireferencia1))+(kint*(x(5)))+
(Kvin*Vin))+rho*(alpha2*(x(1)-pp(1,k+1))
+beta2*(x(2)-pp(2,k+1))+alpha1*(x(3)pp(3,k+1))+beta1*(x(4)-pp(4,k+1))+gamma1*(x(5)pp(5,k+1)));
if (CONVERTIDOR==4)|(CONVERTIDOR==5)
ss=x(4);
elseif (CONVERTIDOR==7)
ss=x(4)-x(2);
else
ss=0;
end
end
end
else
if CONVERTIDOR<4
Iref1=vr1/(cont*a)+(ki*Ireferencia)-(kv*(x(1)-Vref))(kint*(x(3)))-(Kvin*Vin);
vcontrol=cont*a*((kv*(x(1)-Vref))+(ki*(x(2)Ireferencia))+(kint*(x(3)))+(Kvin*Vin));
ss=0;
else
Iref1=vr1/(cont*a)+(ki2*Ireferencia2)-(kv2*(x(1)-Vref2))(kv1*(x(3)-Vref1))-(ki1*(x(4)-Ireferencia1))(kint*(x(5)))-(Kvin*Vin);
vcontrol=cont*a*((kv2*(x(1)-Vref2))+(ki2*(x(2)Ireferencia2))+(kv1*(x(3)-Vref1))+(ki1*(x(4)Ireferencia1))+(kint*(x(5)))+(Kvin*Vin));
if (CONVERTIDOR==4)|(CONVERTIDOR==5)
ss=x(4);
elseif (CONVERTIDOR==7)
ss=x(4)-x(2);
else
ss=0;
end
end
end
if (forzar==0)
if (latch_multiconmutacion==0)|((Vh~=0))
if (Vh==0)
if ((ks(2)*x(2))>(Iref1+Vh))
if (modo_discontinuo==1)&((x(2)+ss<0.0)|(flag2==3))
flag1=3;
else
flag1=2;
end
else
172
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
flag1=1;
end
else
if (flag1==0)&((ks(2)*x(2))<Iref1+Vh)&
&((ks(2)*x(2))>Iref1-Vh)
if (cont==1)
flag1=2;
else
flag1=1;
end
elseif ((ciclo==0)&(Vh~=0))|
|((flag1==3)&(latch_multiconmutacion==0))
if ((ks(2)*x(2))>Iref1+Vh)
flag1=2;
elseif ((ks(2)*x(2))<Iref1-Vh)
flag1=1;
end
end
end
else
if (Vh==0)
switch semaforo
case (0)
dist1=Iref1-(ks(2)*x(2));
if (dist1>0.0)
pwm(:,k+1)=on;
flag1=1;
else
pwm(:,k+1)=off;
if (modo_discontinuo==1)&(x(2)+ss<0.0)
flag1=3;
else
flag1=2;
end
end
case (1)
if (modo_discontinuo==1)
if (uno==0)
if flag2==1
flag1=1;
else
if (x(2)+ss>0.0)
flag1=2;
else
flag1=3;
end
end
uno=1;
end
else
flag1=flag2;
end
if (dist1>0.0)
pwm(:,k+1)=off;
else
173
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
pwm(:,k+1)=on;
end
end
end
end
end
if (forzar~=0)&(ciclo==0)
if (Vh~=0)
if (kk>=2)&((ks(2)*x(2))<(Iref1+Vh))&((ks(2)*x(2))>(Iref1-Vh))
%Para poder realizar el forzado se tiene que
% cumplir que (ki*i) este dentro de los limites
% de la Histeresis y situarnos a partir del
% segundo ciclo.
if (forzar==1)
flag1=1;
else
flag1=2;
end
else
if (flag1==0)&((ks(2)*x(2))<Iref1+Vh)&
&((ks(2)*x(2))>Iref1-Vh)
if (cont==1)
flag1=2;
else
flag1=1;
end
else
if ((ks(2)*x(2))>(Iref1+Vh))|(flag1==3)
flag1=2;
elseif ((ks(2)*x(2))<(Iref1-Vh))|(flag1==3)
flag1=1;
end
end
end
else
if (forzar==1)
if (ki*x(2)>Iref1)&(flag1==0)
flag1=2;
elseif (ki*x(2)<Iref1)&(flag1==0)
flag1=1;
end
if flag2==2
corte=3;
end
if (ki*x(2)<Iref1)
flag1=1;
end
elseif (forzar==2)
if (ki*x(2)>Iref1)&(flag1==0)
flag1=2;
elseif (ki*x(2)<Iref1)&(flag1==0)
flag1=1;
end
if flag2==2
corte=3;
end
174
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
if (ki*x(2)>Iref1)
flag1=2;
end
end
end
end
if flag1==1
%Creacion del Duty cuando se realiza un forzado
pwmff(k+1)=1;
else
pwmff(k+1)=0;
end
if (flag1==1)&(cont==-1)
x=phi1*x+psi1;
elseif (flag1==1)&(cont==1)
x=phi2*x+psi2;
elseif(flag1==2)&(cont==-1)
x=phi2*x+psi2;
elseif(flag1==2)&(cont==1)
x=phi1*x+psi1;
elseif(flag1==3)
x=phi3*x+psi3;
end
if (amplitud_rampa==1)&(kk>=activa_ampli_ramp)
vu=Vu-amplicte*(xT-x01);
vr=vramp(inc*(k+1),Vl,vu,T,p);
else
vr=vramp(inc*(k+1),Vl,Vu,T,p);
end
if (tdas==1)&(kk>=activa_tdas)
if (int_tdas==0)
if CONVERTIDOR<4
Iref=vr/(cont*a)+(ki*Ireferencia)-(kv*(x(1)-Vref))(kint*(x(3)))-(Kvin*Vin)+...
rho*(alpha*(x(1)-pp(1,k+1))+beta*(x(2)-pp(2,k+1)));
ss=0;
else
Iref=vr/(cont*a)+(ki2*Ireferencia2)-(kv2*(x(1)-Vref2))(kv1*(x(3)-Vref1))-...
(ki1*(x(4)-Ireferencia1))-(kint*(x(5)))(Kvin*Vin)+rho*(alpha2*(x(1)-pp(1,k+1))+...
beta2*(x(2)-pp(2,k+1))+alpha1*(x(3)pp(3,k+1))+beta1*(x(4)-pp(4,k+1)));
if (CONVERTIDOR==4)|(CONVERTIDOR==5)
ss=x(4);
elseif (CONVERTIDOR==7)
ss=x(4)-x(2);
else
ss=0;
end
end
else
if CONVERTIDOR<4
Iref=vr/(cont*a)+(ki*Ireferencia)-(kv*(x(1)-Vref))-
175
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
(kint*(x(3)))-(Kvin*Vin)+...
rho*(alpha*(x(1)-pp(1,k+1))+beta*(x(2)pp(2,k+1))+gamma(x(3)-pp(3,k+1)));
ss=0;
else
Iref=vr/(cont*a)+(ki2*Ireferencia2)-(kv2*(x(1)-Vref2))(kv1*(x(3)-Vref1))-...
(ki1*(x(4)-Ireferencia1))-(kint*(x(5)))(Kvin*Vin)+rho*(alpha2*(x(1)-pp(1,k+1))+...
beta2*(x(2)-pp(2,k+1))+alpha1*(x(3)pp(3,k+1))+beta1*(x(4)-pp(4,k+1))+gamma1*...
(x(5)-pp(5,k+1)));
if (CONVERTIDOR==4)|(CONVERTIDOR==5)
ss=x(4);
elseif (CONVERTIDOR==7)
ss=x(4)-x(2);
else
ss=0;
end
end
end
else
if CONVERTIDOR<4
Iref=vr/(cont*a)+(ki*Ireferencia)-(kv*(x(1)-Vref))(kint*(x(3)))-(Kvin*Vin);
ss=0;
else
Iref=vr/(cont*a)+(ki2*Ireferencia2)-(kv2*(x(1)-Vref2))(kv1*(x(3)-Vref1))-...
(ki1*(x(4)-Ireferencia1))-(kint*(x(5)))-(Kvin*Vin);
if (CONVERTIDOR==4)|(CONVERTIDOR==5)
ss=x(4);
elseif (CONVERTIDOR==7)
ss=x(4)-x(2);
else
ss=0;
end
end
end
if (Vh==0)
if (forzar==0)
if (latch_multiconmutacion==1)&(modo_discontinuo==0)
if semaforo==0
dist2=Iref-(ks(2)*x(2));
end
else
dist2=Iref-(ks(2)*x(2));
end
if (dist2<0.0)
if (modo_discontinuo==1)&(x(2)+ss<0.0)
flag2=3;
else
flag2=2;
end
else
flag2=1;
176
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
end
else
if (x(2)+ss<0.0)&(modo_discontinuo==1)
flag1=3;
corte=4;
end
if (forzar==1)
if (flag1==1)&((ks(2)*x(2))>=Iref)
flag1=2;
corte=1;
end
elseif (forzar==2)
if (flag1==2)&((ks(2)*x(2))<=Iref)
flag1=1;
corte=2;
end
end
flag2=flag1;
end
else
if (latch_multiconmutacion==1)
if (x(2)+ss<0.0)&(modo_discontinuo==1)
flag1=3;
corte=4;
end
if (semaforo==0)&(primero==0)
if (flag1==1)&((ks(2)*x(2))>=(Iref+Vh))
flag1=2;
corte=1;
elseif (flag1==2)&((ks(2)*x(2))<=(Iref-Vh))
flag1=1;
corte=2;
end
elseif (ciclo==0)&(primero==1)
if (flag1==1)&((ks(2)*x(2))>=(Iref+Vh))
flag1=2;
corte=3;
down=1;
elseif (flag1==2)&((ks(2)*x(2))<=(Iref-Vh))
flag1=1;
corte=3;
up=1;
end
primero=0;
end
else
if (x(2)+ss<0.0)&(modo_discontinuo==1)
flag1=3;
corte=4;
end
if (flag1==1)&((ks(2)*x(2))>=(Iref+Vh))
flag1=2;
corte=1;
elseif (flag1==2)&((ks(2)*x(2))<=(Iref-Vh))
flag1=1;
corte=2;
end
177
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
flag2=flag1;
end
end
ciclo=1;
if ((flag2~=flag1)&(forzar==0))|(corte~=0)
if ((flag1==1)&(Vh==0)&(forzar==0))|(corte==1)
tk=(k)*inc;
xk1=xk(1);
xk2=xk(2);
xk3=xk(3);
xk4=xk(DIM-1);
xk5=xk(DIM);
if (tdas==1)&(kk>2)
c1=pp(1,k+1);
c2=pp(2,k+1);
c3=pp(3,k+1);
c4=pp(DIM-1,k+1);
c5=pp(DIM,k+1);
end
cT=xT(1);
cT2=xT(2);
cT3=xT(3);
cT4=xT(DIM-1);
cT5=xT(DIM);
cx01=x01(1);
cx02=x01(2);
cx03=x01(3);
cx04=x01(DIM-1);
cx05=x01(DIM);
PARAM=[Vin,R,L,C,Vl,Vu,T,Vref,kv,ki,a,
Rs,cont,xk1,xk2,xk3,tk,p,CONVERTIDOR,Vh,...
kint,kk,tdas,activa_tdas,rho,alpha,beta,
cT,amplitud_rampa,activa_ampli_ramp,...
c1,c2,cx01,c3,gamma,int_tdas,Rc,Rs1,Rc1,C1,
L1,Rs2,Rc2,C2,L2,Vref1,Ireferencia1,...
Vref2,Ireferencia2,Erroref,xk4,xk5,
Ireferencia,kv1,ki1,kv2,ki2,alpha1,beta1,...
gamma1,alpha2,beta2,c4,c5,Kvin,cx02,
cx03,cx04,cx05,cT2,cT3,cT4,cT5,av,ai,ae,...
av1,ai1,av2,ai2];
tn=fsolve('condi12',tk,OPTIONS,[],PARAM);
if (cont==-1)
xtn=phi(A1,tn-tk)*xk+psi(A1,B1,tn-tk);
x=phi(A2,tk+inc-tn)*xtn+psi(A2,B2,tk+inc-tn);
else
xtn=phi(A2,tn-tk)*xk+psi(A2,B2,tn-tk);
x=phi(A1,tk+inc-tn)*xtn+psi(A1,B1,tk+inc-tn);
end
if (modo_discontinuo==1)
if (CONVERTIDOR==4)|(CONVERTIDOR==5)
ss=x(4);
elseif (CONVERTIDOR==7)
ss=x(4)-x(2);
else
ss=0;
end
178
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
if (x(2)+ss<0)
x=phi(A3,tk+inc-tn)*xtn+psi(A3,B3,tk+inc-tn);
end
end
semaforo=1;
if (k~=samples-1)
muestra_tn(:,i)=x;
i=i+1;
end
muestra_onoff(:,j)=x;
j=j+1;
muestra_tnvh(:,d)=x;
d=d+1;
corte=0;
primero=1;
elseif (flag2==1)&(Vh==0)&(forzar==0)&(modo_discontinuo==1)
tk=(k)*inc;
xk1=xk(1);
xk2=xk(2);
xk3=xk(3);
xk4=xk(DIM-1);
xk5=xk(DIM);
if (tdas==1)&(kk>2)
c1=pp(1,k+1);
c2=pp(2,k+1);
c3=pp(3,k+1);
c4=pp(DIM-1,k+1);
c5=pp(DIM,k+1);
end
cT=xT(1);
cT2=xT(2);
cT3=xT(3);
cT4=xT(DIM-1);
cT5=xT(DIM);
cx01=x01(1);
cx02=x01(2);
cx03=x01(3);
cx04=x01(DIM-1);
cx05=x01(DIM);
PARAM=[Vin,R,L,C,Vl,Vu,T,Vref,kv,ki,a,
Rs,cont,xk1,xk2,xk3,tk,p,CONVERTIDOR,Vh,...
kint,kk,tdas,activa_tdas,rho,alpha,beta,
cT,amplitud_rampa,activa_ampli_ramp,...
c1,c2,cx01,c3,gamma,int_tdas,Rc,Rs1,Rc1,C1,
L1,Rs2,Rc2,C2,L2,Vref1,Ireferencia1,...
Vref2,Ireferencia2,Erroref,xk4,xk5,
Ireferencia,kv1,ki1,kv2,ki2,alpha1,beta1,...
gamma1,alpha2,beta2,c4,c5,Kvin,cx02,
cx03,cx04,cx05,cT2,cT3,cT4,cT5,av,ai,ae,...
av1,ai1,av2,ai2];
tn=fsolve('condi31',tk,OPTIONS,[],PARAM);
if (cont==-1)
xtn=phi(A3,tn-tk)*xk+psi(A3,B3,tn-tk);
x=phi(A1,tk+inc-tn)*xtn+psi(A1,B1,tk+inc-tn);
else
xtn=phi(A3,tn-tk)*xk+psi(A3,B3,tn-tk);
x=phi(A2,tk+inc-tn)*xtn+psi(A2,B2,tk+inc-tn);
179
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
end
semaforo=1;
elseif ((flag1==2)|(flag1==3))&(flag2==3)|(corte==4)
tk=(k)*inc;
xk1=xk(1);
xk2=xk(2);
xk3=xk(3);
xk4=xk(DIM-1);
xk5=xk(DIM);
if (tdas==1)&(kk>2)
c1=pp(1,k+1);
c2=pp(2,k+1);
c3=pp(3,k+1);
c4=pp(DIM-1,k+1);
c5=pp(DIM,k+1);
end
cT=xT(1);
cT2=xT(2);
cT3=xT(3);
cT4=xT(DIM-1);
cT5=xT(DIM);
cx01=x01(1);
cx02=x01(2);
cx03=x01(3);
cx04=x01(DIM-1);
cx05=x01(DIM);
PARAM=[Vin,R,L,C,Vl,Vu,T,Vref,kv,ki,a,
Rs,cont,xk1,xk2,xk3,tk,p,CONVERTIDOR,Vh,...
kint,kk,tdas,activa_tdas,rho,alpha,beta,
cT,amplitud_rampa,activa_ampli_ramp,...
c1,c2,cx01,c3,gamma,int_tdas,Rc,Rs1,Rc1,C1,
L1,Rs2,Rc2,C2,L2,Vref1,Ireferencia1,...
Vref2,Ireferencia2,Erroref,xk4,xk5,
Ireferencia,kv1,ki1,kv2,ki2,alpha1,beta1,...
gamma1,alpha2,beta2,c4,c5,Kvin,cx02,
cx03,cx04,cx05,cT2,cT3,cT4,cT5,av,ai,ae,...
av1,ai1,av2,ai2];
tn=fsolve('condi23',tk,OPTIONS,[],PARAM);
if (cont==-1)
xtn=phi(A2,tn-tk)*xk+psi(A2,B2,tn-tk);
x=phi(A3,tk+inc-tn)*xtn+psi(A3,B3,tk+inc-tn);
else
xtn=phi(A1,tn-tk)*xk+psi(A1,B1,tn-tk);
x=phi(A3,tk+inc-tn)*xtn+psi(A3,B3,tk+inc-tn);
end
corte=0;
elseif ((flag1==2)&(flag2==1)&(forzar==0)&
&(modo_discontinuo==0))|(corte==2)
tk=(k)*inc;
xk1=xk(1);
xk2=xk(2);
xk3=xk(3);
xk4=xk(DIM-1);
180
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
xk5=xk(DIM);
if (tdas==1)&(kk>2)
c1=pp(1,k+1);
c2=pp(2,k+1);
c3=pp(3,k+1);
c4=pp(DIM-1,k+1);
c5=pp(DIM,k+1);
end
cT=xT(1);
cT2=xT(2);
cT3=xT(3);
cT4=xT(DIM-1);
cT5=xT(DIM);
cx01=x01(1);
cx02=x01(2);
cx03=x01(3);
cx04=x01(DIM-1);
cx05=x01(DIM);
PARAM=[Vin,R,L,C,Vl,Vu,T,Vref,kv,ki,a,
Rs,cont,xk1,xk2,xk3,tk,p,CONVERTIDOR,Vh,...
kint,kk,tdas,activa_tdas,rho,alpha,beta,
cT,amplitud_rampa,activa_ampli_ramp,...
c1,c2,cx01,c3,gamma,int_tdas,Rc,Rs1,Rc1,C1,
L1,Rs2,Rc2,C2,L2,Vref1,Ireferencia1,...
Vref2,Ireferencia2,Erroref,xk4,xk5,
Ireferencia,kv1,ki1,kv2,ki2,alpha1,beta1,...
gamma1,alpha2,beta2,c4,c5,Kvin,cx02,
cx03,cx04,cx05,cT2,cT3,cT4,cT5,av,ai,ae,...
av1,ai1,av2,ai2];
tn=fsolve('condi21',tk,OPTIONS,[],PARAM);
if (cont==-1)
xtn=phi(A2,tn-tk)*xk+psi(A2,B2,tn-tk);
x=phi(A1,tk+inc-tn)*xtn+psi(A1,B1,tk+inc-tn);
else
xtn=phi(A1,tn-tk)*xk+psi(A1,B1,tn-tk);
x=phi(A2,tk+inc-tn)*xtn+psi(A2,B2,tk+inc-tn);
end
semaforo=1;
if (k~=samples-1)
muestra_tn(:,i)=x;
i=i+1;
end
muestra_offon(:,g)=x;
g=g+1;
muestra_tnvh(:,d)=x;
d=d+1;
corte=0;
primero=1;
elseif (corte==3)
tk=(k)*inc;
if (forzar==1)|(down==1)
if (cont==-1)
xx=phi(A1,tk)*xT+psi(A1,B1,tk);
else
xx=phi(A2,tk)*xT+psi(A2,B2,tk);
end
down=0;
181
SIMSCP - Simulador Convertidores Dc-Dc
E.T.S.E : ELECTRÓNICA INDUSTRIAL
elseif (forzar==2)|(up==1)
if (cont==-1)
xx=phi(A2,tk)*xT+psi(A2,B2,tk);
else
xx=phi(A1,tk)*xT+psi(A1,B1,tk);
end
up=0;
end
corte=0;
end
end
pp(:,k+1)=xx;
ram(k+1)=vr1;
irefe(k+1)=Iref1;
tencontrol(k+1)=vcontrol;
if (k==samples-1)
periodo=1;
end
peri(k+1)=periodo;
tiem(k+1)=tp;
vinput(k+1)=Vin;
tp=tp+inc;
%Para poder representar en fución del tiempo
end
xT=x;
ramp=[ramp ram];
sta=[sta pp];
muestra(:,kk)=x;
ventradap=[ventradap vinput];
iref=[iref irefe];
tensioncontrol=[tensioncontrol tencontrol];
periodos=[periodos peri];
tiempo=[tiempo tiem];
%Almacenamiento del tiempo;
pwmf=[pwmf pwmff];
if (latch_multiconmutacion==1)&(Vh==0)&(forzar==0)
PWM=[PWM pwm];
end
end
close(h)
timecpu=toc;
182