[Captura de datos para la obtención de topografía mediante sistema
Anuncio

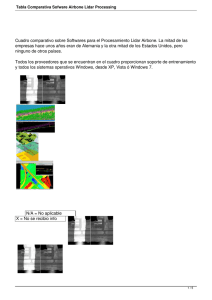
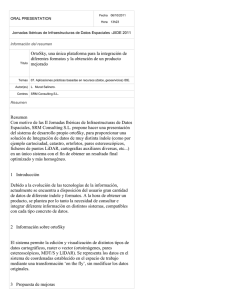
2012 [Captura de datos para la 09 obtención de topografía mediante sistema LiDAR Montado en helicóptero] Contacto: Alejandro Gómez e-mail: [email protected] Tel.: +34927290233 2011 CARACTERÍSTICAS DEL SISTEMA 1. Sistema LiDAR aerotransportado 2. Descripción detallada del sistema 2.1. Equipo aerotransportado 2.1.1. Láser 2.1.2. INS (Inertial Navigation System) 2.1.3. Vídeos 2.1.4. Cámaras Fotográficas 2.2. Equipo terrestre 3. Tipo de aeronave a utilizar 4. Características del vuelo 5. Precisión de las medidas en x,y,z Captura de datos para la obtención de topografía mediante sistema LiDAR 6. Productos a entregar 2 2011 CARACTERÍSTICAS DEL SISTEMA La presente documentación describe los equipos empleados por INSICA y sus características. 1. Sistema LiDAR aerotransportado Imagen 1 Sistema INSICA montado en Helicóptero 2. Descripción detallada del sistema El FLI-MAP (Fast Laser Imaging – Mapping Airborne Platform) es un sistema LiDAR montado en helicóptero diseñado para adquirir información del terreno y orientado especialmente a la captación de largos corredores. Integra varios componentes como son el láser (LiDAR), cámaras fotográficas y cámaras de vídeo, obteniendo una herramienta de medición e interpretación de gran capacidad. La gran densidad de puntos y la alta precisión de los datos del sistema FLI-MAP combinado con la cobertura fotográfica del pasillo medido, permite cartografiar los objetos existentes en el terreno, obtener Modelos del Terreno y determinar con gran precisión la altura de los obstáculos o cruzamientos. Captura de datos para la obtención de topografía mediante sistema LiDAR El sistema LiDAR aerotransportado es un sistema que utiliza una técnica de barrido óptico con pulsos láser para recoger información del terreno. El sistema escáner láser genera coordenadas tridimensionales de millones de puntos sobre la superficie terrestre en un corto período de tiempo. 3 2011 Imagen 2 Operación con el sistema LiDAR En el sistema FLI-MAP se pueden diferenciar dos partes principales, el equipo aerotransportado y el equipo de tierra. Ambos son esenciales para llevar a cabo el trabajo de forma correcta. 2.1. Equipo aerotransportado El equipo aerotransportado consiste en una estructura que se acopla a la parte inferior del helicóptero, un ordenador central y monitores en la cabina. La estructura acoplada a la parte inferior del helicóptero consta de tres partes, que son el armazón y las dos antenas. En la figura a continuación se muestra el esquema de la estructura montada. Captura de datos para la obtención de topografía mediante sistema LiDAR Un paquete informático de procesamiento (FLIP 7) proporciona diferentes filtros y funcionalidades de CAD para aplicar sobre los millones de puntos láser. Dicho software permite la sincronización total de las imágenes de vídeo y fotografías, proporcionando capacidades adicionales al operador en la extracción de información valiosa a partir de los datos láser. 4 2011 Ilustración 3 Diseño del sistema LiDAR El armazón contiene todos los sensores, los cuales están conectados al ordenador central ubicado en la cabina del helicóptero. El ordenador central registra los datos captados, calculando la información de navegación en tiempo real y proporcionando “feedback” al piloto en la trayectoria de vuelo. Todo el sistema lo controla un operador usando un ordenador portátil conectado al ordenador central. El operador dispone de un software avanzado con el que va comprobando que se recubre la zona que debe ser captada. Además en dos pantallas de vídeo observa las imágenes obtenidas por las cámaras. 2.1.1. Láser El sistema FLI-MAP utiliza un láser escáner de 150 kHz de frecuencia para asegurar la precisión y calidad de los datos. El láser obtiene 1.000 mediciones por cada escaneo y tiene un ángulo de barrido de 60º. El láser escanea a una velocidad de 150 veces por segundo, dando como resultado más de 150.000 puntos por segundo. Cada registro del escáner contiene el instante en que se hizo la medición, la orientación del láser, información sobre la verificación de datos y detección de errores e información sobre la intensidad de la señal. Según la Clasificación de láser UNE EN 60825-1 /A2-2002, este láser es Clase 1: “Productos láser que son seguros en todas las condiciones de utilización razonablemente previsibles, incluyendo el uso de instrumentos ópticos en visión directa”. Por lo tanto no es necesario tomar medidas especiales durante el vuelo. Captura de datos para la obtención de topografía mediante sistema LiDAR Como todos los sensores se sitúan dentro de una estructura rígida, todas las distancias entre los sensores son fijas. Estas distancias se calibran cuidadosamente, haciendo mediciones adicionales tras el montaje del equipo. 5 Imagen 4 Puntos LiDAR obtenidos de una zona urbana con color real y color según altura Captura de datos para la obtención de topografía mediante sistema LiDAR 2011 6 2011 2.1.2. INS (Inertial Navigation System) Los principales componentes del INS (Inertial Navigation System) o sistema de navegación inercial, son el IMU (Inertial Measurement Unit) o unidad de medición inercial, un receptor GPS y una unidad de procesamiento. El sistema FLI-MAP utiliza el POS AV (Position and Orientation System – Airborne Vehicles), sistema de posicionamiento y orientación para vehículos aerotransportados de APPLANIX. La unidad IMU mide la rotación en los tres ejes espaciales (Roll, Pitch y Heading) así como las velocidades y aceleraciones en las tres dimensiones, utilizando la combinación de giroscopios y acelerómetros. La unidad se instala solidariamente en la parte superior del emisor láser. Las mediciones del IMU y del GPS son utilizadas por el procesador para calcular con precisión la posición, velocidad y orientación del helicóptero. Posteriormente proporcionará el archivo POS EO, de orientación externa (External Orientation). 2.1.3. Vídeos El sistema incorpora dos cámaras de vídeo digital fijas, para identificar elementos del pasillo objeto de medición. Una cámara apunta hacia el frente con un ángulo de inclinación de 45º. La otra cámara apunta hacia abajo mostrando aproximadamente el área cubierta por el láser. Junto a las cámaras de vídeo se sitúan dos cámaras digitales de alta resolución, están situadas una hacia abajo y la otra con una inclinación de 45º. Ambas cámaras se configuran para capturar imágenes a intervalos regulares. Normalmente se tomará una imagen cada 2 segundos, pero se puede ajustar a otras especificaciones. Las imágenes se almacenan en formato comprimido en discos duros y se pueden ortorrectificar en gabinete. Usando esas imágenes ortorrectificadas se pueden construir mosaicos con el software FLIP7, o con otro software. Captura de datos para la obtención de topografía mediante sistema LiDAR 2.1.4. Cámaras Fotográficas 7 2011 Imagen 5 Puntos LiDAR, Fotografías y Vídeos El equipo terrestre consiste en varias estaciones base y ordenadores de procesamiento. Las estaciones base contienen una antena y un receptor GPS, batería y registro de datos. Durante las mediciones las estaciones registrarán datos GPS desde puntos de referencia de coordenadas conocidas (vértices geodésicos). Los ordenadores de procesamiento se usarán para comprobar y hacer copias de seguridad de todos los datos recogidos, tanto por las estaciones base como por el sistema aerotransportado, para interpretar los cálculos de la línea base GPS y la integración IMU/GPS, y para analizar la calidad de los datos adquiridos. Para mantener gran precisión en el posicionamiento absoluto del sistema aerotransportado, se realiza un post-procesamiento de los datos GPS del helicóptero y de las estaciones base. Junto a la antena GPS, se sitúa otra antena Omnistar, que proporciona precisión submétrica para correcciones en tiempo real de GPS Diferencial. Usando la señal Omnistar, FLI-MAP puede navegar a lo largo de una línea predefinida, independientemente de la disponibilidad del servicio local de GPS Diferencial o de conexiones de radio a las estaciones base. Captura de datos para la obtención de topografía mediante sistema LiDAR 2.2. Equipo terrestre 8 2011 3. Tipo de aeronave a utilizar El sistema FLI – MAP está certificado en todo el mundo por la American Federal Aviation Authorities en 5 tipos de helicópteros diferentes: de la marca Bell el Jet Ranger y el Long Ranger, de la marca Eurocopter los modelos AS 350 y AS 355, y de Mc Donald – Douglas el MD 500. A los mandos de la aeronave se encontrará un piloto experimentado en trabajos con el sistema y en tierra un mecánico encargado del mantenimiento del aparato y de las labores logísticas para el abastecimiento de combustible. 4. Características del vuelo Se realizará un vuelo con especificaciones según las necesidades de cada cliente. En la tabla a continuación podemos ver las propiedades obtenidas según las características del vuelo (Extraída de otra tabla al final de este documento). PROPIEDADES DEL SISTEMA 1xVIDEO PÍXEL ANCHO DE VÍDEO CÁMARA FOTOGRÁFICA DENSIDAD DE PUNTOS 120 m 175 m 225 m 350 m 102 m 153 m 200 m 316 m 8 cm 12 cm 15 cm 24 cm 41 m 64 m 85 m 138 m PÍXEL ANCHO DE FOTO 3,2 cm 4 cm 6 cm 9,3 cm 92 m 139 m 181 m 287 m A 80 km/h 48 puntos/m2 33 puntos/m2 25 puntos/m2 16 puntos/m2 5. Precisión de las medidas en x,y,z La precisión relativa de las mediciones realizadas con el sistema FLI-MAP es muy alta, del orden de 1,5 cm en X, Y, Z, 1 sigma. La precisión absoluta, dependerá de la utilización o no de estaciones base Con estaciones base: 4 cm en Z y unos 7 cm en X, Y. Sin estaciones base: aproximadamente 20 cm. Captura de datos para la obtención de topografía mediante sistema LiDAR LÁSER ALTITUD DE VUELO ANCHO DE LÁSER 9 2011 6. Productos a entregar Los productos variarán según el tipo de trabajo a realizar, pero para un proyecto de una nueva línea eléctrica, podemos desglosar un listado básico de elementos entregables: Cartografía 2D: Datos de planimetría digital en 2D (X, Y) del terreno en el área captada en formato DXF a escala, representando los obstáculos y cruzamientos. Límites de carreteras Líneas eléctricas de Alta y Media Tensión Límites de ríos Edificios Árboles Vallados y lindero Raíles Modelo Digital del Terreno (MDT): Entrega de un modelo en formato X, Y, Z del MDT del área captada en el vuelo. Cartografía 3D: Obtención la cartografía digital de Líneas Eléctricas, Carreteras, caminos y ríos en 3D. Fotografías: Ficheros con fotografías de alta resolución para la obtención de detalles, realizadas durante el vuelo con orientación frontal y cenital, entregadas en DVD o disco duro portátil. Viewer: aplicación sencilla de visualización de las instalaciones en fotografías de alta resolución e imágenes de vídeo que permiten comprobar la situación actual. Planta y perfil: en formato digital a escala con los cruzamientos representados en altura. Captura de datos para la obtención de topografía mediante sistema LiDAR Vídeos: Ficheros AVI de los vídeos tomados durante el vuelo de las cámaras orientadas hacia abajo y al frente, entregados en DVD o disco duro portátil. 10 Contacto: Alejandro Gómez e-mail: [email protected] Tel.: +34927290233