Práctica en clase (3): Órbitas - Pontificia Universidad Javeriana, Cali
Anuncio
: Órbitas - Pontificia Universidad Javeriana, Cali")
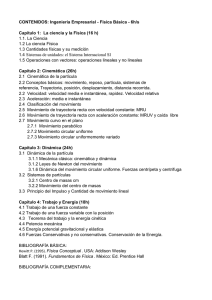
Pontificia Universidad Javeriana. Facultad de Ingeniería Departamento de Ciencias Naturales y Matemáticas – Área de Física Cinemática y Dinámica PRÁCTICA DE CLASE No. 1 CÁLCULO NUMÉRICO DE TRAYECTORIAS ORBITALES 1. TIPO DE PRÁCTICA Actividad en Clase o Práctica Casera. 2. OBJETIVOS 2.1 Determinar de manera gráfica trayectorias orbitales de planetas usando métodos numéricos. 2.2 Aprender el uso de métodos numéricos para la solución de problemas mecánicos. 3. CONCEPTOS A AFIANZAR 3.1 3.2 3.3 3.4 3.5 3.5.1 3.5.2 3.5.3 3.5.4 Ley de Gravitación Universal. Dinámica de una partícula. Métodos numéricos (método de Euler). Cinemática del movimiento curvilíneo. Conceptos Previos: Posición Velocidad Aceleración Descripción de un movimiento 4. TÉCNICAS EXPERIMENTALES 4.1 Cálculo numérico por el método de Euler. 5. TIEMPO NECESARIO PARA EL DESARROLLO 2 Horas. 6. MATERIAL REQUERIDO 6.1 Calculadora o Computador con hoja electrónica. 6.2 Papel milimetrado. 7. BREVE MARCO TEÓRICO 7.1 Descripción del Método Numérico 1 Pontificia Universidad Javeriana. Facultad de Ingeniería Departamento de Ciencias Naturales y Matemáticas – Área de Física Cinemática y Dinámica Aún cuando velocidad y la aceleración instantáneas de una partícula tradicionalmente se expresan en la forma: r ( t t ) r ( t ) v ( t ) lim t t 0 v ( t t ) v ( t ) a( t ) lim t t 0 (1.a) (1.b) las siguientes expresiones son igualmente válidas para dichas magnitudes: r ( t t 2 ) r ( t t 2 ) v ( t ) lim t t 0 v ( t t 2 ) v ( t t 2 ) a( t ) lim t t 0 (2.a) (2.b) De donde las siguientes aproximaciones resultan razonables, siempre que el intervalo de tiempo t sea suficientemente pequeño: r ( t t ) r (t ) v ( t t 2 ) t v ( t t ) v (t ) a ( t t 2 ) t (2.a) (2.b) de donde se obtiene que: r (t t ) v (t )t r (t ) (3.a) v (t t ) a (t )t v (t ) (3.b) De las leyes de la dinámica, específicamente de la 2ª ley de Newton, puede determinarse la fuerza resultante que actúa sobre un objeto en movimiento y, de ahí, su aceleración: 2 Pontificia Universidad Javeriana. Facultad de Ingeniería Departamento de Ciencias Naturales y Matemáticas – Área de Física Cinemática y Dinámica F (r , v , t ) a (r , v , t ) m (Donde se ha considerando la situación mas general posible en que la fuerza dependería del tiempo, así como de la posición y velocidad de la partícula bajo estudio). Una vez conocida la función aceleración de una partícula y sus condiciones iniciales (generalmente, la posición y de la velocidad de la partícula en cierto instante de tiempo), podrá predecirse la posición y la velocidad de la partícula en instantes de tiempo posteriores, usando las expresiones (3) de manera sucesiva, cuantas veces como sea necesario (iteraciones). La siguiente tabla ilustra esta idea: PASO ACELERACIÓN Condiciones iniciales 1 2 3 . . n F (ro , v o , t o ) a o (r , v , t ) m F (r1 , v1 , t1 ) a1 (r , v , t ) m F (r2 , v 2 , t 2 ) a 2 (r , v , t ) m . . F ( rn 1 , v n 1 ,t n 1 ) a n 1 ( r , v , t ) m TIEMPO VELOCIDAD POSICIÓN to vo ro t1 =to + t v1 a0 t vo r1 v o t ro t2 =t1 + t v2 a1t v1 r2 v1 t r1 t3 =t2 + t v3 a2 t v2 r3 v 2 t r2 . . . . . . tn vn rn Tabla 1. De la discusión anterior se observa que es posible determinar la trayectoria de una partícula por métodos numéricos siguiendo los siguientes pasos: 7.1.1 Determinar las funciones para las componentes ax, ay y az de la aceleración, a partir de la segunda ley de Newton. 7.1.2 7.1.3 Seleccionar un conjunto de condiciones iniciales adecuadas. Encontrar un intervalo de tiempo t conveniente para las iteraciones. Esto quiere decir que el tamaño de t debe ser suficientemente pequeño en comparación con el intervalo de tiempo total en el que se quiere describir el movimiento de la partícula. 3 Pontificia Universidad Javeriana. Facultad de Ingeniería Departamento de Ciencias Naturales y Matemáticas – Área de Física 7.1.4 Cinemática y Dinámica Calcular las sucesivas aceleraciones, velocidades y posiciones como se ilustra en la tabla 1. 7.2 Descripción del Sistema bajo Estudio y Análisis Dinámico del Mismo La figura 1 muestra un cuerpo de masa m que se mueve bajo la influencia de una fuerza central (ej.: fuerza gravitacional) originada por la presencia de una cuerpo central de masa M. Sí la masa M es mucho mayor que la masa m del cuerpo, puede suponerse que M se mantendrá fijo en el origen, es decir, que el efecto de m sobre M es despreciable. Eje y órbita m y r F Eje x M x Para cualquier fuerza central puede probarse que la trayectoria del cuerpo está contenida en un plano. En el caso específico de la fuerza gravitacional, despreciando todas las interacciones sobre m diferentes a F, se encuentra que las componentes de la aceleración del cuerpo están dadas por: a x GM ( x) (x y 2 )3/ 2 2 y a y GM ( y ) (x y 2 )3/ 2 (4) 2 El propósito de esta práctica es hallar las trayectorias orbitales de un planeta, como la tierra, en su movimiento de traslación alrededor del sol. Cuando se resuelven analíticamente las ecuaciones (4) se encuentra que la trayectoria seguida por m puede ser cualquiera de las secciones cónicas (circunferencia, elipse, parábola o hipérbola) dependiendo de cual sea la velocidad inicial del cuerpo, o de la excentricidad de la cónica (Ver detalladamente la referencia 11.5). Es posible probar que sí la velocidad inicial vo de m es perpendicular al segmento que une las dos masas, y v0c es la velocidad inicial necesaria para que m ejecute una trayectoria circular, la forma de la trayectoria dependerá del valor de la razón vo/ v0c , así: Circunferencia: 4 Pontificia Universidad Javeriana. Facultad de Ingeniería Departamento de Ciencias Naturales y Matemáticas – Área de Física Elipse: 2, Parábola: 2 Hipérbola: 2 Cinemática y Dinámica 8. PROCEDIMIENTO. 8.1 Órbita Circular. Considere primero el caso en que la órbita es una circunferencia cuyo radio es igual al semieje mayor de la órbita terrestre. Este semieje tiene un valor de 1,496 x 1011 m y comúnmente se usa en astronomía como una unidad de longitud. Dicha unidad se llama Unidad Astronómica UA: 1 UA = 1,496 x 1011 m Para facilitar los cálculos de esta práctica se recomienda medir las distancias en UA y los tiempos en años. Tenga cuenta los siguientes parámetros y condiciones iniciales cuando vaya a realizar los cálculos indicados en la tabla 1: M = Msol = 1,99 x 1030 kg G = 6,67 x 10-11 N.m2/kg2 t = (1/52) año ( o menor) xo = 1 UA yo = 0 vxo = 0 vyo = 2 UA/año = Círculo Órbita Terrestre/ año 8.1.1 Justifique el valor dado a vyo, a partir de la dinámica del movimiento circular. 8.1.2 Con los datos de la lista anterior determine los valores de axo y ayo y regístrelos en la tabla 3. 8.1.3 Escoja un valor para t y tomando como guía la tabla No. 2, calcule los valores de las componentes de la aceleración, la velocidad y la posición en diferentes instantes de tiempo, dentro del intervalo 0 < ti < 1 año.. Consigne sus resultados en la tabla 3. Use calculadora u hoja electrónica. 5 Pontificia Universidad Javeriana. Facultad de Ingeniería Departamento de Ciencias Naturales y Matemáticas – Área de Física Cinemática y Dinámica 8.1.4 Una vez calculadas las diferentes posiciones para un período de rotación (52 semanas), grafique en una hoja de papel milimetrado los puntos formados por las coordenadas (xi, yi), de las dos últimas columnas de la tabla 2. La figura resultante representa la trayectoria que seguiría la tierra si su órbita fuera circular. La verdadera trayectoria de la tierra es una elipse muy cercana a esta circunferencia, pues las distancias de la tierra al sol cuando está en el afelio (punto más lejano) y cuando está en el perihelio (punto más cercano) difieren entre sí solamente en un 3%. 8.2 Trayectoria Elíptica. 8.2.1 Repita el procedimiento de 6.1 usando una velocidad inicial igual a la mitad de la empleada en ese numeral (esto es, vyo = (UA/año)). Como aquí se está suponiendo una velocidad inicial menor, el planeta se “precipita rápidamente hacia el sol y reduce su período de giro. Debido a esto, el valor de t = 1 semana para las iteraciones no es suficientemente pequeño. Por lo tanto se recomienda reducir su valor a, por ejemplo, t = (1/520) año = (1/10 de semana). 8.2.2 Realice la gráfica de esta segunda trayectoria en la misma hoja de papel milimetrado que usó en 6.1. Para facilitar esta labor se recomienda no considerar todos los puntos calculados sino tomar, por ejemplo, los puntos obtenidos cada 10 iteraciones. 8.2.3 Primera Ley de Kepler. Verifique la primera ley de Kepler comprobando que la trayectoria es una elipse. Para ello ubique los focos de esta supuesta elipse y compruebe (para dos o tres puntos de la trayectoria) que la suma de las distancias de cada punto a los focos se mantiene constante. 8.2.4 Segunda Ley de Kepler. Tome dos intervalos de tiempo iguales en diferentes tramos de la trayectoria. Verifique la segunda ley Kepler midiendo sobre el papel milimetrado las áreas barridas en cada intervalo y comparándolas. 8.2.5 Tercera Ley de Kepler. De sus cálculos y/o de la gráfica halle el período de la órbita y su semieje mayor. Con estos valores halle la constante de Kepler y compárela con el valor que predice la Ley de Gravitación Universal para objetos que orbitan al Sol: 4 2 a 3 T2 . G ( M S m) 8.3 *Trayectoria Parabólica (Opcional). 6 Pontificia Universidad Javeriana. Facultad de Ingeniería Departamento de Ciencias Naturales y Matemáticas – Área de Física Cinemática y Dinámica 8.3.1 Repita el procedimiento de 6.1 tomando t = (1/52) año y cambiando la velocidad inicial a, UA v yo 2 2 año 8.3.2 Dibuje la trayectoria obtenida. 8.3.3 Verifique que esta trayectoria es una parábola. Para ello ubique la directriz de la parábola y compruebe, para algunos puntos de la trayectoria, la relación que debe existir entre la distancia del punto al foco y del punto a la directriz. 9. TIPO DE INFORME REQUERIDO Formato de Artículo para revista. Máximo 5 páginas, sin incluir anexos. 10. PREGUNTAS 10.1 Demuestre las ecuaciones (4). 10.2 Los resultados obtenidos en esta práctica, ¿dependerán del valor particular que tenga la masa m del cuerpo? 10.3 Sí la excentricidad de la órbita terrestre es de 0,017 (e = (c/a), a = 1 UA), cuál es la distancia entre sus focos? Determine también la diferencia porcentual entre las distancias de la tierra al sol cuando está en el afelio y cuando está en el perihelio. 10.4 Mencione las fuentes de error que usted considere relevantes en esta práctica. 11. BIBLIOGRAFÍA 11.1 Edición, McGraw Hill, 1997, Sección 6.5. R. A. SERWAY, Física, Tomo I, 4ª. 11.2 W. E. GETTYS, F. J. Keller, M. J. Skove, FÍSICA: Clásica y Moderna, McGraw Hill, 1991, Secciones 3.6, 3.7, 7.6, 7.7 y 7.8. 11.3 R.M. EISBERG, L.S. LERNER, FÍSICA, Fundamentos y Aplicaciones, Volumen 1, Editorial McGraw Hill, 1983, Sección 7 Pontificia Universidad Javeriana. Facultad de Ingeniería Departamento de Ciencias Naturales y Matemáticas – Área de Física Cinemática y Dinámica 11.5. 11.4 S. LEA AND J. BURKE, PHYSICS, The Nature of Things, Brooks/Cole Publishing Company, 1997, Ensayo 1 (pág. 162), sección 5.4. 11.5 CH. KITTEL, W.D. KNIGHT, M.A. RUDERMAN, Mecánica (Berkeley Physics Course – Volumen 1), Editorial Reverté, 1973, Capítulo 9, Tema Avanzado 2. 8 Pontificia Universidad Javeriana. Facultad de Ingeniería Departamento de Ciencias Naturales y Matemáticas – Área de Física Cinemática y Dinámica TABLA No. 2 i v t 2i -1 x, 2 y, vxo = 0 0 1 v 2 i 1 2 t1 / 2 2 i 1 2 vyo = t v x0 2 t v y0 2 a x ,i ti xi yi to = 0 xo = 1 UA yo = 0 t 1 t x1 v x ,1 / 2 t x 0 y1 v y ,1 / 2 t y 0 a x ,1 GM a x , 2 GM t 2 v x ,1 / 2 a x 0 3 t 2 v x ,3 / 2 a x1 t v x ,1 / 2 v y ,3 / 2 a y1 t v y ,1 / 2 t 2 2 t x 2 v x ,3 / 2 t x1 y 2 v y ,3 / 2 t y1 v y ,1 / 2 a y 0 a y ,i axo = ayo = x1 ( x1 y1 ) 2 2 3/ 2 x2 a y ,1 GM a y , 2 GM y1 ( x1 y1 ) 3 / 2 2 y2 2 t3 / 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . i 2i 1 t 2i 1 t 2 2 v x, 2 i 1 2 ax ,i 1t v x, 2i 3 2 v y, 2 i 1 2 a y ,i 1t v y, 2i 3 2 ti =it xi v x, 2 i 1 2 t xi 1 yi v y, 2 i 1 2 t y i 1 a x ,i GM ( x2 y 2 ) 2 2 3/ 2 xi ( xi y i ) 2 2 3/ 2 a y ,i GM 2 (x2 y2 ) 3 / 2 2 2 yi ( xi y i ) 3 / 2 2 2 Pontificia Universidad Javeriana. Facultad de Ingeniería Departamento de Ciencias Naturales y Matemáticas – Área de Física Cinemática y Dinámica TABLA No. 3 i 0 1 2 3 t 2i -1 2 v x, v 2 i 1 2 vxo = 0 y, vyo = 2 i 1 2 ti xi yi to = 0 xo = 1 UA yo = 0 a x ,i axo = a y ,i ayo = Pontificia Universidad Javeriana. Facultad de Ingeniería Departamento de Ciencias Naturales y Matemáticas – Área de Física Cinemática y Dinámica