Determinación de la probabilidad de escape en un sistema galáctico
Anuncio

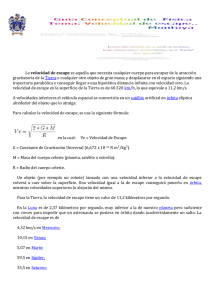
TRABAJO FIN DE ESTUDIOS MÁSTER INTERUNIVERSITARIO EN MODELIZACIÓN MATEMÁTICA, ESTADÍSTICA Y COMPUTACIÓN Determinación de la probabilidad de escape en un sistema galáctico Wafaa Kanaan Tutor: Víctor Lanchares Barrasa Facultad de Ciencias, Estudios Agroalimentarios e Informática Curso 2011-2012 Determinación de la probabilidad de escape en un sistema galáctico, trabajo fin de estudios de Wafaa Kanaan , dirigido por Víctor Lanchares Barrasa (publicado por la Universidad de La Rioja), se difunde bajo una Licencia Creative Commons Reconocimiento-NoComercial-SinObraDerivada 3.0 Unported. Permisos que vayan más allá de lo cubierto por esta licencia pueden solicitarse a los titulares del copyright. © © El autor Universidad de La Rioja, Servicio de Publicaciones, 2012 publicaciones.unirioja.es E-mail: [email protected] UNIVERSIDAD DE LA RIOJA Facultad de Ciencias, Estudios Agroalimentarios e Informática TRABAJO FIN DE MÁSTER Máster en Modelización Matemática, Estadı́stica y Computación Determinación de la probabilidad de escape en un sistema galáctico Alumna: Director: Wafaa Kanaan Vı́ctor Lanchares Barrasa Logroño, 7 de septiembre de 2012 Introducción Todas las estrellas que podemos ver a simple vista en una noche oscura pertenecen a nuestra galaxia, la Vı́a Láctea. Determinar su forma y estructura no es sencillo y a ello dedicaron su esfuerzo los astrónomos desde el trabajo pionero de William Herschel [6]. La figura 1 muestra, de manera esquemática, la estructura de la Vı́a Láctea, en la que puede verse su forma espiral, pero también que se trata de un disco plano con un engrosamiento central. 30 kpc C N C S Sol Sol Figura 1: La Vı́a Láctea vista desde arriba se muestra como un sistema circular con brazos espirales. Vista de lado aparece como un disco con un engrosamiento central. El Sol está situado aproximadamente a dos tercios de distancia del centro C. La Galaxia gira alrededor de un eje central, donde N y S representan los polos norte y sur galácticos respectivamente. El diámetro estimado del disco es de unos 30 kiloparsecs, donde un parsec es una unidad de distancia que equivale a 3.26 años luz. Por el contrario, el espesor del disco es tan solo de un kiloparsec. La galaxia gira alrededor de su eje, pero no como un sólido rı́gido, sino que las estrellas giran individualmente alrededor del centro galáctico, preferentemente en órbitas casi circulares. Por ejemplo el Sol tarda unos 200 millones de años en completar una órbita. Se cree que hay unos 100 mil millones de estrellas en la galaxia, aunque también hay presente materia oscura, representada en la figura 1 por una lı́nea de trazo negro. La distancia entre estrellas dentro de la galaxia fueron determinadas hacia mediados del siglo XIX por el método de paralaje trigonométrica. Sin iii iv Introducción Figura 2: Clasificación de Hubble de los diferentes tipos de galaxias, atendiendo a su forma. Las galaxias que no responden a este esquema se clasifican como irregulares (I). embargo, este método tiene un rango de aplicación que está en torno a 100 parsecs. A partir de 1912, se pudo estimar la distancia a un tipo especial de estrellas, las variables Cefeidas, lo que permitió probar que nuestra galaxia era mayor de lo que se pensaba previamente. Gracias a la observación de Cefeidas, en la década de 1920, Hubble [7] descubrió que ciertas nebulosas brillantes, que hasta entonces habı́an sido consideradas parte de la Vı́a Láctea, eran en realidad objetos que estaban muy alejados de ella. Su descubrimiento desterró la creencia de que todo el universo observable se reducı́a a nuestra propia galaxia y se vio que estas nebulosas eran en realidad otras galaxias, es decir, estructuras con un enorme número de estrellas, gas, polvo y materia oscura. La galaxia más cercana a la nuestra es la Galaxia de Andrómeda (M31) y tiene una estructura espiral similar a la nuestra. Las galaxias espirales, como ası́ se denominan a estas galaxias, son probablemente las más numerosas entre las galaxias brillantes. Comparten con la Vı́a Láctea las caracterı́sticas principales, como son la rotación, el aplanamiento, el engrosamiento central y la presencia de materia oscura. Según la clasificación de Hubble, de 1926, se subdividen en diferentes tipos: Sa, Sb y Sc, en orden decreciente, según la importancia del núcleo, o engrosamiento central, en relación con el disco que lo rodea. Algunas de estas galaxias tienen en la parte central estructuras con aspecto de barra y a este tipo de galaxias se les denomina espirales barradas y, con el mismo criterio que las espirales, se subdividen en SBa, SBb y SBc. Mientras que las galaxias espirales son las más abundante entre las galaxias brillantes, el grupo más numeroso entre todas las galaxias es el que se clasifica como elı́pticas. Estas tienen forma elipsoidal, apenas rotan y casi no tienen gas y polvo. Las galaxias elı́pticas se subdividen en E0, E1, . . . , E7, Introducción v Elíptica Espiral Figura 3: Curvas isofotas para galaxias elı́pticas y espirales. donde el número se va incrementando a medida que la forma de la galaxia se va lejando más de un cı́rculo. La figura 2 muestra, de manera esquemática, la clasificación de las galaxias, según el sistema propuesto por Hubble. A diferencia de las estrellas, que presentan una imagen puntual, las galaxias tienen apariencia nebulosa, con las formas descritas previamente. Gracias a los dispositivos de captación de luz disponibles actualmente, es posible obtener una distribución precisa de la luz proveniente de estos objetos. Esta distribución queda descrita de manera conveniente mediante las isofotas, que son curvas de nivel de igual intensidad lumı́nica (véase la figura 3). El problema principal estriba en determinar dónde termina una galaxia, ya que no hay un borde definido, debido a la disminución gradual del brillo desde el centro hacia la periferia. En este sentido, para estimar el tamaño de una galaxia se usa el radio de Holmberg, que corresponde a la isofota con un brillo de 26.5 magnitudes por segundo de arco cuadrado. Sin embargo, este lı́mite no es del todo real ya que, en la década de 1970, la observación de las nubes de hidrógeno que rodean las galaxias espirales puso de manifiesto que los tamaños de la galaxias debı́an de ser mucho mayores que la parte visible observable. No obstante, este hecho también se puede deducir del estudio sistemático de las órbitas de las estrellas, principalmente en las galaxias dominadas estelarmente, es decir, con poco gas y polvo, como son las elı́pticas y las espirales de tipos tempranos (Sa, Sb, SBa, SBb). De este modo, podemos decir que el estudio de las órbitas estelares dentro de las galaxias constituye una importante fuente de información sobre las mismas. De hecho, su estudio no solo es importante por conocer los tipos de órbitas que se dan en estos sistemas, sino porque también las órbitas son necesarias para construir modelos autoconsistentes de galaxias. Por autoconsistente podemos entender un modelo en el que se cumple que el potencial gravitatorio galáctico, creado por las estrellas, gas y polvo, da lugar a una distribución de masas similar a la que se deduce de las isofotas. Pero además, la superposición de todas las órbitas estables, que se derivan de la acción del potencial gravitatorio galáctico, reproducen la forma de la Introducción vi galaxia. En este sentido podemos hablar de pares potencial-densidad que tengan la propiedad de autoconsistencia. Estos modelos están creados teniendo en cuenta que la función potencial Φ(x, y, z) satisface la ecuación de Poisson (ver, por ejemplo, [1, 4, 5]) ∆Φ(x, y, z) = 4πGρ(x, y, z), donde ∆ representa el operador de Laplace, G es la constante de gravitación universal y ρ(x, y, z) es la función de densidad. Los modelos clásicos más usados [1, 3] son: 1. Modelo de Plummer GM , ΦP = − √ 2 R + b2 donde R2 = x2 +y 2 +z 2 , M es la masa de la galaxia y b es una constante. 2. Modelo de Kuzmin ΦK = − q GM r2 + (a + |z|)2 , con r2 = x2 + y 2 . 3. Modelo de Miyamoto-Nagai Φ = −q GM , √ 2 2 2 2 r + (a + z + b ) donde a y b son constantes. Obsérvese que este modelo generaliza los dos anteriores, ya que si a = 0 se tiene el modelo de Plummer y si b = 0 el de Kuzmin. 4. Modelo logarı́tmico 1 z2 ΦL = v02 ln RC2 + r2 + 2 , 2 qΦ " # donde v0 , RC y qΦ son constantes con |qΦ | < 1. Estos son los potenciales usados con mayor frecuencia, aunque hay otros modelos que se usan en la literatura (para una relación amplia de los diferentes modelos de potencial puede consultarse el libro de Binney & Tremaine [1]). Introducción vii En cualquier caso, cerca del centro galáctico todos los potenciales anteriores admiten un desarrollo en serie de potencias de la forma Φ(x, y, z) = a r2 + b z 2 + c r2 z 2 + d r4 + e z 4 , (1) con a, b, c, d y e parámetros que dependen del modelo y de las constantes del mismo. Nosotros consideraremos el caso en que a = b y d = e. Tomando como potencial galáctico la expresión anterior, más manejable y sencilla, numerosos autores han estudiado el comportamiento de los sistemas galácticos desde diferentes puntos de vista, fundamentalmente desde el de los sistemas dinámicos (véase [3] para una compilación extensa de referencias). Considerado como un sistema dinámico, se pueden aplicar las numerosas herramientas que existen para su estudio con el fin de obtener información relevante. En concreto, se puede establecer un atlas de soluciones periódicas con su tipo de estabilidad, se puede estudiar el grado de regularidad del sistema o la dinámica de escape. A esta última parte vamos a dedicar el objeto de esta memoria. Un sistema con escape es aquel en el que si la energı́a del sistema supera un cierto lı́mite, algunas órbitas pueden escapar al infinito. Existen numerosos ejemplos de sistemas con escape y entre ellos se encuentran los modelos galácticos con un potencial como el anterior. Para estos sistemas un parámetro de importancia es la probabilidad de escape para un determinado nivel de energı́a. Esta probabilidad se puede obtener de diversas maneras, una de las cuales se basa en la aplicación del Método de Montecarlo. Para ello suelen tomarse grandes muestras con diferentes tipos de órbitas evaluando, con un criterio fiable, cuándo la órbita escapa o no. Lo que nos proponemos hacer en esta Memoria es estimar el tamaño óptimo de la muestra que nos dé con cierta precisón, en un margen de confianza establecido, la probabilidad de escape. Esto, sin duda, contribuye a optimizar el cálculo de probabilidades de escape, aunque, como se verá, el problema es más difı́cil de lo que parece, ya que la forma en la que se tome la muestra influye en gran medida en la probabilidad obtenida. Este es tanto más acusado para probabilidades bajas. viii Introducción Índice general Introducción III 1. Planteamiento del problema 1.1. Potencial y curvas de velocidad cero . . . 1.2. Equilibrios . . . . . . . . . . . . . . . . . 1.2.1. Equilibrios en el plano z = 0 . . . 1.2.2. Equilibrios fuera del plano z = 0 . 1.3. Mecanismo de escape . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 3 4 5 7 9 2. Probabilidad de escape por el método de Monte Carlo 2.1. Determinación del tamaño muestral . . . . . . . . . . . . 2.2. Cálculo de la probabilidad para Lz constante . . . . . . . 2.2.1. Muestra uniforme frente a muestra aleatoria . . . 2.3. Probabilidad de escape con energı́a fija . . . . . . . . . . . . . . . . . . . . . . 15 17 19 22 26 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3. Conclusiones 29 Bibliografı́a 31 ix Capı́tulo 1 Planteamiento del problema El problema que vamos a considerar es el de evaluar la probabilidad de escape de una estrella de las inmediaciones del núcleo de la galaxia. En general, los núcleos galácticos presentan una acumulación de masa, que puede ser un agujero negro, y ejercen su atracción sobre las estrellas más distantes del centro, hasta un cierto lı́mite que fijaremos en 1.5 kiloparsecs, es decir estrellas alejadas del centro no más de 4890 años luz. Para estudiar el problema debemos modelar el tipo de atracción que ejerce el núcleo sobre una estrella. El modelo más sencillo serı́a mediante la ley de gravitación de Newton, pero este modelo no recoge bien la estructura real de una galaxia. En el modelo de Newton es como si toda la masa del núcleo galáctico estuviera situada en un punto que se localiza en el centro del mismo. Es por ello que se consideran otros modelos diferentes, aunque, eso sı́, basados siempre en la mecánica clásica. Como se ha dicho en la introducción de esta memoria, las galaxias dominadas estelarmente pueden ser modeladas por potenciales relativamente sencillos, que dan lugar a estructuras autoconsistentes. En estos casos, la fuerza con la que una estrella es atraı́da por el núcleo viene determinada por el potencial. En el modelo que nosostros vamos a considerar, la función de potencial, creada por la atracción del núcleo, va a venir dada por la expresión (1) y que escribiremos como V (r, z) = h i ω2 2 (r + z 2 ) − α(r4 + z 4 ) + 2βr2 z 2 . 2 Aquı́, se ha supuesto que la galaxia tiene simetrı́a de rotación, además de ser simétrica respecto a un plano, que es el denominado plano galáctico. Esto qiere decir que si la galaxia es girada alrededor de un eje perpendicular al plano galáctico, que pasa por el centro de la galaxia, siempre verı́amos la misma figura. Bajo este supuesto, r = x2 + y 2 es la distancia de una estrella al centro de la galaxia, medida sobre el plano galáctico (el plano de simetrı́a); 1 2 Capı́tulo 1. Planteamiento del problema z es la altura de una estrella sobre el plano galáctico; ω es la velocidad angular con que gira la galaxia; α y β son parámetros que dependen de la forma de la galaxia y es un parámetro de escala, que no es relevante, salvo para medir la importancia relativa de los dos términos del potencial. Si a la energı́a creada por el potencial del centro de la galaxia le sumamos la energı́a cinética de la estrella, debida a su velocidad, se obtiene la función de energı́a L2 1 H = (p2r + p2z ) + z2 + V (r, z), 2 2r donde pr es la velocidad radial (pr = dr/dt), pz es la velocidad vertical ~ × R, ~˙ (pz = dz/dt) y Lz es la tercera componente del momento angular, R ~ = (x, y, z) y R ~˙ = dR/dt. ~ donde R Suponiendo que el sistema considerado es conservativo y, debido a las simetrı́as del problema, tanto H como Lz son constantes, es decir, dH/dt = dLz /dt = 0. Por otra parte, r, z, pr y pz definen un conjunto de variables canónicas, de manera que H es la función hamiltoniana del sistema. De aquı́ se deducen las ecuaciones del movimiento, que son un conjunto de ecuaciones diferenciales que nos indican cómo cambian la posición (r y z) y velocidad (pr y pz ) de la estrella con el tiempo. Estas ecuaciones se escriben como ∂H dr = = pr , dt ∂pr ∂H dz = = pz , ż = dt ∂pz ṙ = ∂H L2 pr =− = 3z − ω 2 r + (4αr3 + 4βrz 2 ), ṗr = dt ∂r r pz ∂H ṗz = =− = −ω 2 z + (4αz 3 + 4βr2 z). dt ∂z (1.1) En este punto, fijaremos los valores de los parámetros que aparecen en el problema, que tomaremos como ω = 1, = 1, α = 0,2, β = −1,2. Con esta elección de valores para ω y , las unidades de medida son: una unidad de longitud = 1 kiloparsec, una unidad de tiempo = 107 años, una unidad de masa = 1 masa solar. 1.1. Potencial y curvas de velocidad cero 3 Los parámetros definidos anteriormente son idénticos para cada estrella, sin embargo, Lz y H dependen de cada una en particular, ya que representan su energı́a y la tercera componente de su momento angular que, obviamente, cambiarán con cada estrella considerada. Dependiendo de estos valores, podemos encontrar dos tipos de movimiento: acotados y no acotados, que denominaremos de escape. En realidad hay un valor crı́tico de la energı́a, que recibe el nombre de energı́a de escape, de manera que por encima de dicho valor la estrella puede escapar de la atracción del núcleo galáctico. 1.1. Potencial y curvas de velocidad cero Para comprender el mecanismo de escape es conveniente estudiar las regiones en las que una estrella puede estar localizada, en función de su energı́a y su momento angular. Esto puede deducirse a partir de la función de potencial efectivo, que se obtiene de H restando ṙ2 + ż 2 . En este caso resulta h i L2z ω2 2 L2z 2 4 4 2 2 + V (r, z) = + (r + z ) − α(r + z ) + 2βr z . 2r2 2r2 2 Como la energı́a, dada por H, se conserva, una vez fijado un nivel de energı́a, el mayor valor del potencial efectivo se alcanza cuando la velocidad es 0, es decir, cuando p2r + p2z = 0. De aquı́ resultan las curvas de velocidad cero, que son las curvas de nivel que se obtienen de Ve = Ve = H para diferentes valores de la energı́a H. La figura 1.1 muestra varias de estas curvas para los valores establecidos de ω = 1, = 1, α = 0,2, β = −1,2 y un valor de Lz = 0,1. Una estrella con energı́a inicial H solo puede desplazarse hacia regiones donde el valor de Ve sea menor que H. Esto es ası́ ya que, si hay una ganancia de velocidad, p2r + p2z será una cantidad mayor que cero, obligando a que Ve sea menor, para que la energı́a se conserve. Por tanto, si una estrella tiene una energı́a que da lugar a una curva de velocidad cero cerrada, su órbita se mantendrá siempre en el interior de dicha curva y la estrella no puede escapar de la atracción del núcleo galáctico. Este es el caso que aparece en la figura 1.1 para un valor de la energı́a igual a 0.2. Por el contrario, si la curva de velocidad cero es no acotada, la estrella puede llegar a escapar de la influencia del núcleo, como en el caso de la figura 1.1 para una energı́a igual a 0.4. Entre estos dos valores de la energı́a se encuentra el valor crı́tico de la misma que separa los movimientos acotados de los de escape. Este valor, 4 Capı́tulo 1. Planteamiento del problema 1.0 0.316513 z 0.5 0.0 0.2 0.2 0.4 -0.5 0.5 -1.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 r Figura 1.1: Diferentes curvas de velocidad cero. Son las curvas de nivel del potencial efectivo Ve para diferentes valores de la energı́a. para Lz = 0,1, es H = 0,316513. Ası́, por debajo de este valor las estrellas están atrapadas en una cierta región, mientras que para valores superiores pueden tener una trayectoria de escape. El cambio de situación está asociado a la aparición de un punto de equilibrio inestable de tipo centro × silla, que se ve claramente en la curva de color rojo de la figura 1.1. Las coordenadas de este punto se pueden obtener resolviendo numéricamente las ecuaciones (1.1) cuando son igualadas a 0. Estas soluciones corresponden a puntos de equilibrio, es decir, puntos en los que una estrella podrı́a permanecer por tiempo indefinido si no actuaran otras fuerzas sobre ella. Cuando Lz = 0,1 se obtienen los siguientes puntos de equilibrio E1,2 ≡ (pr = 0, pz = 0, r = 0,188086, z = ±1,20924), E3 ≡ (pr = 0, pz = 0, r = 0,323203, z = 0), E4 ≡ (pr = 0, pz = 0, r = 1,1144, z = 0). Como vemos hay cuatro equilibrios, dos de los cuales no aparecen reflejados en la figura 1.1. Si los tenemos en cuenta, vemos que si la energı́a se hace mayor que 0,586415 aparecen nuevos canales de escape debidos a los puntos de silla correspondientes a E1,2 (ver figura 1.2, curva azul). 1.2. Equilibrios Los equilibrios dependen del valor de Lz y, en general de los parámetros del sistema. Aunque nosotros hayamos fijado dichos valores, vamos a hacer un análisis más detallado de su existencia ası́ como de su tipologı́a. Igualando 1.2. Equilibrios 5 1.5 0.586415 0.586415 1.0 0.8 0.5 z 0.2 0.0 -0.5 0.316513 0.8 0.2 0.8 0.316513 -1.0 -1.5 0.586415 0.2 0.4 0.6 0.8 1.0 1.2 1.4 r Figura 1.2: Curvas de velocidad cero, cuando Lz = 0,1 y valores de la energı́a superiores. Se puede apreciar que aparecen nuevos canales de escape, asociados a los equilibrios inestables fuera del plano z = 0. a cero las ecuaciones (1.1), se obtiene que para las soluciones de equilibrio debe ser pr = 0, pz = 0, [ω 2 − (4αz 2 + 4βr2 )]z = 0 De la tercera igualdad se sigue que hay dos tipos de equilibrios; aquellos con z = 0 y aquellos en los que z viene dado por √ 2 ω − 4βr2 √ . (1.2) z=± 2 α 1.2.1. Equilibrios en el plano z = 0 Si z = 0, sustituyendo en la tercera ecuación de (1.1), se tiene un equilibrio siempre que r satisfaga la ecuación P(r) ≡ 4αr6 − ω 2 r4 + L2z = 0. (1.3) Aplicando la regla de los signos de Descartes [11], la ecuación (1.3) tiene a lo más dos raı́ces reales positivas. Si α > 0, como es el caso que estamos considerando, a partir de la resultante de P(r) podemos concluir lo siguiente: 1. Si 0 ≤ L2z < ω6 , existen dos equilibrios con z = 0. 1082 α2 2. Si L2z = ω6 existe un solo equilibrio con z = 0. 1082 α2 3. Si L2z > ω6 no hay equilibrios con z = 0. 1082 α2 6 Capı́tulo 1. Planteamiento del problema Además, es fácil ver que, cuando L2z ción (1.3) viene dada por ω6 , la raı́z doble de la ecua= 1082 α2 ω . (1.4) 6α A partir de aquı́, deducimos que, cuando P(r) tiene dos raı́ces positivas r1 y r2 , éstas satisfacen 0 < r1 < rd , r2 > rd . (1.5) rd = √ Una vez estudiada la existencia de estos equilibrios, nos centramos ahora en su naturaleza, analizando su estabilidad lineal. Para ello debemos ver cómo son los valores propios que resultan de la matriz asociada a la linealización del sistema (1.1) en torno a los puntos de equilibrio. Esta matriz resulta ser ∂2H ∂pr ∂r ∂2H ∂pr ∂z ∂2H ∂p2r ∂2H ∂pz ∂r − ∂2H ∂r2 ∂2H ∂pz ∂z ∂2H ∂pz ∂pr M= 2 ∂ H − ∂z∂r 2 2 ∂ H ∂ H − ∂r∂z − ∂r∂p r 2 2 − ∂∂zH2 ∂2H ∂pr ∂pz 2 ∂ H − ∂r∂p z ∂2H ∂p2z 2 ∂ H ∂ H − ∂z∂p − ∂z∂p r z pr =0,pz =0,z=0,r=r1,2 de donde se obtienen los siguientes valores propios q 2 − ω2, λ1,2 = ± 4βr1,2 q λ3,4 = ± 6 2 12αr1,2 − ω 2 r1,2 − 3L2z 2 r1,2 (1.6) . Como en nuestro caso β < 0, los dos primeros valores propios son imaginarios puros, para los dos puntos de equilibrio. Sin embargo, la naturaleza de λ3,4 va a depender de r. En efecto, puesto que estamos en una solución de equilibrio, se cumple P(r) = 0 ⇒ L2z = ω 2 r4 − 4αr6 . Por tanto, q λ3,4 = ± 4 2 4r1,2 (6αr1,2 − ω2) 2 r1,2 , y, teniendo en cuenta (1.4) y (1.5), λ3,4 son imaginarios cuando r = r1 y son reales cuando r = r2 . En consecuencia, cuando r = r1 tenemos un punto de tipo centro y cuando r = r2 el equilibrio es de tipo centro × silla, que habitualmente se denomina simplemente punto de silla. Cuando los dos equilibrios coinciden los valores propios λ3,4 se anulan y se produce una bifurcación que, por la naturaleza de los equilibrios que intervienen, va a ser de tipo silla-nodo. 1.2. Equilibrios 1.2.2. 7 Equilibrios fuera del plano z = 0 El análisis de estos puntos se hace de manera similar al efectuado en la subsección anterior. Para empezar, sustituimos el valor de z dado por la ecuación (1.2) en la tercera de las ecuaciones (1.1). De este modo, para obtener un punto de equilibrio, r ha de verificar la ecuación Q(r) ≡ 4(α2 − β 2 )r6 − ω 2 (α − β)r4 + αL2z = 0. (1.7) El estudio conjunto de las ecuaciones (1.2) y (1.7) es más dificultoso que en el caso z = 0, ya que sus soluciones dependen no solo del valor de Lz , sino también de α y β. Aquı́ analizaremos solo el caso en que α > 0 y β < 0, como es el caso que nos va a ocupar. También supondremos > 0. En estas condiciones, por cada solución de la ecuación (1.7) se obtienen valores válidos de z dados por (1.2), ya que β < 0. Por tanto, solo debemos ocuparnos de estudiar las soluciones de (1.7). Para poder determinar el número de soluciones de (1.7) vemos que la secuencia de coeficientes del polinomio Q(r) es la siguiente potencia r6 coeficiente 4(α2 − β 2 ) signo +/− r5 0 r4 r3 −ω 2 (α − β) 0 − r2 0 r1 0 r0 αL2z + De aquı́ se deduce que si α2 − β 2 > 0 el número de soluciones puede ser a lo sumo dos, mientras que si α2 − β 2 < 0 el número de soluciones es siempre una. Caso α2 − β 2 < 0 Como ya se ha dicho, en este caso siempre hay una solución de la ecuación (1.7), que da lugar a dos puntos de equilibrio situados simétricamente respecto al plano z = 0. Su naturaleza depende de los valores propios de la matriz del sistema lineal asociado. Esta matriz tiene la siguiente estructura M = donde A=− ∂ 2H , ∂r2 0 0 1 0 0 0 A B 0 B C 0 B=− ∂ 2H , ∂z∂r 0 1 0 0 , C=− ∂ 2H , ∂z 2 8 Capı́tulo 1. Planteamiento del problema por lo que los valores propios son solución de la ecuación λ4 − (A + C)λ2 + (AC − B 2 ). Una condición suficiente para que el equilibrio sea de tipo centro × silla es que AC − B 2 < 0. Ahora bien, teniendo en cuenta que se satisface (1.7), resulta AC − B 2 = − 8(α − β) (4βr2 − ω 2 ) (6αr2 + 6βr2 − ω 2 ) . α (1.8) Como α2 − β 2 < 0 y α > 0 y β < 0 es evidente que AC − B 2 < 0 y el punto de equilibrio es de tipo centro × silla. Caso α2 − β 2 > 0 Al igual que se hizo en la subsección 1.2.1, a partir de la resultante de Q(r), podemos concluir lo siguiente: ω 6 (α − β) , existen cuatro equilibrios con z 6= 0, simétri108α2 (α + β)2 cos dos a dos respecto al plano z = 0. 1. Si 0 ≤ L2z < ω 6 (α − β) 2. Si = existen dos equilibrios con z 6= 0, simétricos 108α2 (α + β)2 respecto al plano z = 0. L2z 3. Si L2z > ω 6 (α − β) no hay equilibrios con z 6= 0. 108α2 (α + β)2 Además, puede verse que, cuando L2z = ω 6 (α − β) , la raı́z doble de 108α2 (α + β)2 la ecuación (1.7) viene dada por rd = q w . (1.9) 6(α + β) A partir de aquı́, deducimos que, cuando Q(r) tiene dos raı́ces positivas r1 y r2 , éstas satisfacen 0 < r1 < rd , r2 > rd . (1.10) La estabilidad de los puntos de equilibrio se sigue de (1.8), (1.9) y (1.10). Puede verse que los equilibrios para los que r = r1 son de tipo centro × silla, mientras que aquellos para los que r = r2 son de tipo centro. Cuando los equilibrios coinciden, r1 = r2 , se produce una bifurcación silla-nodo. 1.3. Mecanismo de escape 9 Lz = 0.1 Lz = 0.24 1.0 0.5 0.5 0.5 0.0 0.0 0.0 -0.5 z 1.0 z z Lz = 0.05 1.0 -0.5 -1.0 -0.5 -1.0 0.0 0.2 0.4 0.6 0.8 r 1.0 1.2 -1.0 0.0 0.2 0.4 0.6 0.8 1.0 r 1.2 0.0 0.2 0.4 0.6 0.8 1.0 1.2 r Figura 1.3: Curvas de velocidad cero, cuando α2 − β 2 > 0. En la figura ω = = α = 1 y β = −0,5. De izquierda a derecha va aumentando el valor de la tercera componente del momento angular (Lz = 0,05, 0,1 y 0,24), pasando de una situación en la que hay seis equilibrios hasta otra en la que no hay ninguno. En la figura 1.3 pueden verse las curvas de velocidad cero en el caso en que α2 − β 2 > 0, donde se observa la evolución de los puntos crı́ticos a medida que Lz va aumentando, pasando de haber seis equilibrios hasta que no hay ninguno. Además, de las dos bifurcaciones que tienen lugar, siempre se produce primero la que afecta a los equilibrios en el plano z = 0. En ω6 , mientras que efecto, la primera bifurcación se produce cuando L2z = 1082 α2 ω 6 (α − β) la segunda tiene lugar para L2z = . Restando ambos valores 108α2 (α + β)2 resulta ω 6 (α − β) ω6 (3α + β)βω 6 − =− < 0. 108α2 (α + β)2 1082 α2 1082 α2 (α + β)2 1.3. Mecanismo de escape La discusión hecha sobre los de puntos de equilibrio, ası́ como de las correspondientes curvas de velocidad cero, refleja la existencia de diferentes situaciones, en cada una de las cuales el problema de determinar órbitas acotadas o no es diferente. En este trabajo, nos centraremos exclusivamente en el caso en que los parámetros del sistema son los que quedaron fijados anteriormente: ω = = 1, α = 0,2 y β = −1,2. En estas condiciones, se ha visto que siempre existen dos equilibrios fuera del plano z = 0, que son de tipo centro × silla y que hemos denominado E1,2 . Además, mientras Lz < 0,481125 hay otros dos equilibrios en el plano z = 0, uno de tipo centro, 10 Capı́tulo 1. Planteamiento del problema 1.0 Órbita de Lyapunov z 0.5 0.0 0.32 ! 0.5 ! 1.0 0.32 0.2 0.4 0.6 0.8 1.0 1.2 1.4 r Figura 1.4: Órbita de Lyapunov para el nivel de energı́a 0,32, cuando Lz = 0,1. E3 y otro de tipo centro × silla, E4 . Es este último punto de equilibrio el que propicia la separación entre movimientos acotados y no acotados. De hecho, si la energı́a es superior a la del punto E4 , las curvas de velocidad cero se abren en las inmediaciones de E4 . En esa apertura se encuentra una órbita que actúa de puente y es la denominada órbita de Lyapunov. En una primera aproximación podemos calcularla resolviendo el sistema lineal asociado al equilibrio E4 , para un valor de la energı́a ligeramente por encima del de E4 . La estructura del sistema lineal es muy simple, ya que el sistema de ecuaciones (1.1) se desacopla en dos subsistemas, uno en r, pr y otro en z, pz : ( ṙ = pr , ṗr = 4(6αr22 − ω 2 )r, ( ż = pz , ṗz = (4βr22 − ω 2 )z, donde r2 = 1,1144 es la coordenada r de E4 . El primer subsistema está asociado a los valores propios reales λ3,4 (ver Eq. (1.6)), dando lugar a soluciones que no son periódicas. Por el contrario, el subsistema en z es el asociado a los valores propios imaginarios λ1,2 y da lugar a soluciones periódicas. De este modo, en una primera aproximación, la órbita de Lyapunov es tal que r = r2 y aparecerá como un segmento vertical que actúa de puente o puerta en las curvas de velocidad cero. En la figura 1.4 se muestra la órbita de Lyapunov para un valor de la energı́a igual a 0,32. La importancia de la órbita de Lyapunov estriba en el hecho de que toda trayectoria que la cruce en una dirección no puede volver a cruzarla en la 11 0.6 0.6 0.4 0.4 0.2 0.2 0.0 0.0 z z 1.3. Mecanismo de escape 0.32 -0.2 ! 0.4 -0.4 -0.6 0.32 ! 0.2 ! 0.6 0.32 0.2 0.4 0.6 0.8 r 1.0 1.2 1.4 0.32 0.2 0.4 0.6 0.8 1.0 1.2 1.4 r Figura 1.5: Dos órbitas con comportamiento de escape distinto para un nivel de energı́a igual a 0,32 y Lz = 0,1. dirección contraria [3, 9]. Es decir, la órbita de Lyapunov es la puerta de salida para las trayectorias de escape. Dado que su disposición es aproximadamente vertical con r = r2 , podemos suponer que si para una trayectoria existe un tiempo t para el cual r(t) > r2 , entonces la trayectoria es una trayectoria de escape. No todas las órbitas escapan, sino solo aquellas que en algún momento cruzan por la órbita de Lyapunov. En la figura 1.5 pueden verse dos órbitas diferentes, una de las cuales escapa y la otra no. Por otra parte, debemos hablar de escape efectivo, en el sentido de que si el tiempo de escape es superior a un determinado tiempo lı́mite, hemos de considerar que la trayectoria no ha escapado realmente. Este tiempo lı́mite lo hemos fijado en 109 años, por lo que en las unidades de tiempo elegidas equivale a t = 100. De este modo, si una órbita no ha escapado en 100 unidades de tiempo no va a ser considerada de escape. Nuestro objetivo es estimar la probabilidad de escape para una estrella con una energı́a y un momento angular dados en un tiempo inferior a 100. En una primera aproximación podemos ver lo que sucede mediante secciones de Poincaré. Una sección de Poincaré es una sección del espacio de fases del sistema, transversal a las órbitas. Sobre la misma se define una función, denominada aplicación de Poincaré, que a un punto P de dicha sección le hace corresponder el primer punto de la órbita que pasa por P que está en la sección de Poincaré y que la corta en una dirección determinada. En nuestro caso, hemos tomado como sección de Poincaré el plano z = 0, cuando pz > 0, de manera que la sección está contenida en el plano (r, pr ), donde puede verse con facilidad el escape. El lı́mite de la sección, fijado un 12 Capı́tulo 1. Planteamiento del problema valor de la energı́a H, viene dado por H= L2 p2r r2 + z2 + − 0,2r4 , 2 2r 2 que resulta de hacer z = pz = 0 en la función hamiltoniana, cuando ésta toma el valor de energı́a H. Sobre la misma, y con Lz = 0, 1, hemos tomado al azar 1000 condiciones iniciales y hemos calculado numéricamente, para cada una de ellas, las imágenes de la aplicación de Poincaré con t < 100. Empezando con una energı́a por debajo de la de escape, H = 0,2, se aprecian en la sección estructuras regulares bien definidas (ver figura 1.3), correspondientes, en general, a movimientos cuasiperiódicos sobre toros invariantes. Cuando el valor de la energı́a aumenta, H = 0,3, apenas quedan estructuras regulares y, aunque las órbitas todavı́a no pueden ser de escape, su movimiento presenta un comportamiento caótico, de forma que la órbita que pasa por un punto de la sección de Poincaré, pasa por un entorno de casi todo punto de la misma, excepción hecha de las zonas de comportamiento regular. Este comportamiento preludia el escape en cuanto hay un canal abierto para el mismo. Y esto puede verse en la figura 1.3 cuando H = 0,32, ligeramente por encima de la energı́a de escape. En concreto, vemos cómo alguna de las trayectorias escapa por el canal abierto, aunque la mayorı́a de las trayectorias ocupan la práctica totalidad de la sección, en un movimiento irregular, no encontrando el canal de escape en el tiempo efectivo. Por tanto, la probabilidad de escape en este caso es esperable que no sea muy alta. Cuando la energı́a aumenta, vemos cómo cada vez más órbitas encuentran el canal de escape, al tiempo que empiezan a aparecer zonas blancas en la sección de Poincaré. Estas zonas corresponden a aquellas órbitas que encuentran el canal de escape muy rápido y por tanto no regresan a la superficie de sección con r < 1,5. Por otra parte, la densidad de puntos sobre la misma disminuye, indicando que los tiempos de escape disminuyen, al tiempo que aumenta la probabilidad de escape. Por último, las secciones de Poincaré muestran claramente que las órbitas que escapan lo hacen con pr > 0 y con valores de pr cada vez mayores. Esto indica que una vez que la órbita empieza a alejarse, lo hace cada vez más rápido. 1.3. Mecanismo de escape 13 Figura 1.6: Secciones de Poincaré con z = 0 y pz > 0 para Lz = 0,1 y diferentes valores de la energı́a. 14 Capı́tulo 1. Planteamiento del problema Capı́tulo 2 Probabilidad de escape por el método de Monte Carlo Como se ha visto, cuando Lz = 0,1, existen tres canales de escape, aunque la energı́a de escape está vinculada al punto de silla E4 . En este capı́tulo consideraremos solamente la posibilidad de escape por el canal que se encuentra en el plano galáctico, asociado al punto de silla E4 . Para ello tomaremos valores de la energı́a comprendidos entre la correspondiente a E4 y la correspondiente a E1,2 , es decir, valores en el intervalo (0,316513, 0,586415). Para estimar la probabilidad aplicaremos el método de Monte Carlo. Dado un nivel de energı́a H, tomaremos un paquete de condiciones iniciales distribuidas de manera uniforme en todo el espacio de configuración, que no es otra cosa que el conjunto L2 1 E = {(r, z, pr , pz ) ∈ R4 | (p2r + p2z ) + z2 + V (r, z) = H, r < r2 , Lz = 0,1}. 2 2r Mediante un método de integración numérica, implementado en la rutina DSolve de M athematica, propagaremos cada una de las condiciones iniciales hasta el valor efectivo de tiempo TF = 100, equivalente a la vida media de una galaxia, estimada en 109 años. Si antes de este periodo de tiempo se ha cruzado la órbita de Lyapunov, diremos que hay escape, mientras que si se alcanza el valor TF , sin cruzar la órbita de Lyapunov, diremos que la órbita ha quedado atrapada. Para saber que se ha cruzado la órbita de Lyapunov hemos establecido un criterio sencillo, asociado al valor de r, ya que si r alcanza un cierto valor crı́tico, habremos sobrepasado la órbita de Lyapunov. Este valor crı́tico lo hemos establecido en rc = 1,2, algo superior al valor de la coordenada r de E4 . Por tanto, toda órbita que, en un momento determinado anterior a TF , alcance un valor de r superior rc , será considerada de escape. 15 16 Capı́tulo 2. Probabilidad de escape por el método de Monte Carlo X pr z r Er,z Spre,pz r z Figura 2.1: Volumen de condiciones iniciales para un nivel de energı́a h = 0,32. En la parte superior como producto de los conjuntos Er,z y Sper ,pz . En la parte inferior dos cortes para pz = 0 y pz = 0,5. De este modo, si N es el número total de condiciones iniciales tomadas en E y NE el total de condiciones iniciales que dan lugar a órbitas de escape, la probabilidad de escape, para el nivel de energı́a H, se obtiene mediante el cociente NE . pe = N Una primera cuestión que debemos resolver es cómo construir el conjunto de N condiciones iniciales dentro de E. En este sentido es importante notar que E puede obtenerse como producto de los siguientes conjuntos L2z + V (r, z) = e ≤ H, r < r2 }, 2r2 = {(pr , pz ) ∈ R2 | p2r + p2z = 2(H − e)}, Er,z = {(r, z) ∈ R2 | Sper ,pz donde el primero es el conjunto de todos los puntos (r, z) en el interior de la curva de velocidad cero, para un nivel de energı́a H, mientras que el segundo es una circunferencia, cuyo radio es función de r y z. Esquemáticamente e podemos ver el conjunto E, como producto de Er,z , Spr,pz en la figura 2.1, donde, además se pueden apreciar diferentes cortes del volumen en el espacio (r, z, pr ), para valores de pz = 0 y pz = 0,5. Con esta descomposición podemos tomar puntos uniformemente distrie buidos en los conjuntos Er,z y Spr,pz para tener la muestra. En concreto, tomamos puntos en un rectángulo que contiene al conjunto Er,z , para luego seleccionar los que realmente están en su interior. Cada punto seleccionado define una circunferencia, de la que se selecciona una colección de puntos igualmente espaciados. Este proceso de construcción de la muestra se puede 2.1. Determinación del tamaño muestral 17 0.6 0.4 z 0.2 0.0 -0.2 -0.4 -0.6 0.2 0.4 0.6 0.8 1.0 1.2 r Figura 2.2: Muestra de puntos igualmente espaciados sobre el conjunto Er,z , cuando H = 0,32 y Lz = 0,1. ver en la figura 2.2, donde se observa la colección de puntos uniformemente distribuidos en un rectángulo, y resaltados en otro color los que pertenecen a Er,z . 2.1. Determinación del tamaño muestral Una vez visto el sistema de construcción de la muestra, la siguiente cuestión es determinar su tamaño. Evidentemente, cuanto mayor sea el tamaño, mejor será la estimación de la probabilidad. Sin embargo, estamos interesados en buscar el tamaño óptimo de la misma, con el fin de evitar cálculos innecesarios. En este sentido, podemos considerar, que para una determinada energı́a y, fijado el valor de Lz , la probabilidad de que una órbita escape es p, de manera que o escapa con probabilidad p o no escapa con probabilidad 1 − p. Es decir, podemos suponer que tenemos una distribución binomial, por lo que se puede estimar el tamaño de la muestra mediante la ecuación [8] TM = z 2 p (1 − p) , ε2 (2.1) que depende de tres factores: 1. El nivel o intervalo de confianza z. Designa la probabilidad de que la muestra seleccionada sea correcta. Un intervalo de confianza del 95 % significa que únicamente en un 5 % de los casos los resultados obtenidos de la muestra resultarı́an incorrectos. El intervalo de confianza más utilizado es del 95 % [2]. Intervalos de confianza más elevados son una 18 Capı́tulo 2. Probabilidad de escape por el método de Monte Carlo TM 8000 6000 4000 2000 0.2 0.4 0.6 0.8 1.0 p Figura 2.3: El tamaño de la muestra,TM , en función de la probabilidad, para un nivel de confianza del 5 % y un error muestral del 1 %. garantı́a de que los resultados obtenidos tengan una menor probabilidad de estar equivocados. Sin embargo, también suponen un importante incremento de los costos de la investigación. Un nivel de confianza del 95 % corresponde a z = 1,96. 2. El error de muestreo ε. Expresa el grado de congruencia entre el valor de los datos recabados del análisis de la muestra, y el valor real que tendrı́an esos mismos datos cuando son extrapolados a la población general. El error de muestreo marca ası́ la diferencia entre las caracterı́sticas de la muestra y las de la población de la cual fue seleccionada dicha muestra [10]. Como ejemplo, cuando una investigación cuantitativa presente un error de muestreo del 3 %, un dato obtenido de un 30 % de la muestra equivale, dentro de la poblacin general, a ese mismo 30 %, pero comprendido en una horquilla de ±3 puntos. Es decir, un 30 % en la muestra se traducirı́a en un 27–33 % del total de la población. En general, el error de muestreo no debe ser superior al 5 % para que los resultados sean realmente informativos y útiles. 3. La varianza de la población. Al tratarse de una distribución binomial dicha varianza es igual a p (1 − p). Como, en general, desconocemos el valor de p, en el peor de los casos podemos tomar p = 0,5, obteniendo de este modo una cota superior del tamaño muestral. Por ejemplo, si queremos determinar el tamaño de la muestra con un nivel de confianza del 95 % (z = 1,96) y un error muestral del 2 %, en el peor de 2.2. Cálculo de la probabilidad para Lz constante 19 p P 0.60 0.04 0.55 0.03 0.50 0.02 0.45 0.01 10000 20000 30000 40000 50000 60000 70000 ã 10 000 30 000 50 000 70 000 100 000 150 000 TM Figura 2.4: Probabilidad de escape en función del tamaño muestral cuando Lz = 0,1. A la izquierda H = 0,32 y a la derecha H = 0,4. los casos el tamaño de la misma será TM = 1,962 0,52 = 2401. 0,022 Si el error muestral se reduce a un 1 %, entonces el tamaño muestral serı́a cuatro veces mayor. En concreto TM = 9604. En el problema que estamos considerando, tomaremos el error muestral del 1 %. Ası́, el tamaño muestral variará en función de la probabilidad de escape, pasando de 0 a 9604 cuando la probabilidad varı́e entro 0 y 0,5, disminuyendo de nuevo el tamaño muestral hasta 0 cuando p = 1. La gráfica de la figura 2.3 reproduce la función (2.1) donde se aprecia la variación del tamaño de la muestra con la probabilidad. Para comprobar de una manera numérica que esta estimación del tamaño muestral es adecuada, hemos calculado la probabilidad de escape para diferentes tamaños de la muestra, hasta valores cercanos a 200000 puntos. Hemos tomado Lz = 0,1 y dos valores de la energı́a diferentes, uno cercano a la energı́a de escape y otro mayor, de manera que en un caso la probabilidad es pequeña, mientras que en el otro es cercana a 0,5. Estos valores son H = 0,32 y H = 0,4. El resultado se ve en la figura 2.4, en la que puede apreciarse cómo a partir de 10000 puntos la probabilidad se mantiene en un rango pequeño de valores. Incluso en el caso en que la probabilidad es cercana a 0,5 muestras con 3000 o 4000 puntos arrojan un valor aceptable de la probabilidad. 2.2. Cálculo de la probabilidad para Lz constante Una vez visto cómo determinar el tamaño muestral nos proponemos ver cómo cambia la probabilidad de escape a medida que la energı́a aumenta, 20 Capı́tulo 2. Probabilidad de escape por el método de Monte Carlo mientras Lz se mantiene constante y que tomaremos igual a 0, 1. Sin embargo, nos encontramos con un problema y es que el tamaño de la muestra depende de la probabilidad de escape, que es justamente lo que queremos determinar. En principio nos interesaremos solo por ver que las estimaciones hechas son correctas y luego propondremos una manera de dar una primera aproximación de la probabilidad, que nos permita refinarla por el método de Monte Carlo, con un tamaño adecuado de la muestra. Como se vio en la sección anterior, tamaños de la muestra suficientemente elevados dan lugar a probabilidades más o menos constantes, o al menos en un rango de variación relativamente pequeño. Teniendo esto en cuenta, tomaremos muestras con un número de puntos suficientemente alto, entre 40000 y 50000, con el fin de obtener un valor de la probabilidad que supondremos como el real. En realidad está afectado de error, pero lo usaremos como base para validar la probabilidad obtenida con tamaños de muestra menores. El valor de la energı́a, el tamaño de la muestra y la probabilidad obtenida aparecen recogidos en la tabla 2.1 Energı́a 0,32 0,34 0,36 0,38 0,40 0,42 0,44 0,46 0,48 0,50 0,52 0,54 0,56 Tamaño Probabilidad 45501 0,035930 41304 0,213418 42573 0,314049 40388 0,424185 41620 0,514248 41686 0,599170 41688 0,675710 41242 0,727414 40932 0,761531 41440 0,774493 44352 0,778051 42141 0,780665 42208 0,817807 Cuadro 2.1: Probabilidad de escape, con Lz = 0,1, para valores crecientes de la energı́a con un tamaño muestral entre 40000 y 50000. Como era de esperar, la probabilidad es una función creciente de la energı́a, ya que la apertura del canal de escape es mayor cuanto mayor es ésta. Además el crecimiento es muy rápido al principio, amortiguándose a 2.2. Cálculo de la probabilidad para Lz constante 21 p 0.8 0.6 0.4 0.2 0.40 0.45 0.50 0.55 H Figura 2.5: Ajuste de la probabilidad de escape mediante mı́nimos cuadrados. En rojo el polinomio de segundo grado obtenido usando todos los puntos. En negro el polinomio obtenido usando los dos extremos y el punto central. medida que la energı́a aumenta. De hecho si la energı́a siguiera aumentando deberı́amos ver cómo la probabilidad se acerca asintóticamente a uno. No obstante, para los valores considerados, por debajo de la energı́a de los puntos E1,2 , la función de probabilidad puede ajustarse bastante bien por el polinomio de segundo grado p(H) = −3,94003 + 17,8975H − 16,8887H 2 , que resulta de aplicar el método de mı́nimos cuadrados al conjunto de datos de la tabla 2.1. Una aproximación similar se obtiene eligiendo tan solo tres puntos de control, con energı́as 0,32, 0,44 y 0,56. En este caso el polinomio es p̄(H) = −4,09126 + 18,4161H − 17,2319H 2 . En la figura 2.5 se ven los polinomios p(H) (en rojo), p̄(H) (en negro) y los puntos en los que se ha calculado la probabilidad. Estos polinomios nos van a servir para estimar a priori la probabilidad de escape para un valor de la energı́a. Esta estimación nos va a determinar, mediante (2.1), el tamaño muestral óptimo para obtener un nuevo valor de la probabilidad de escape refinado usando el método de Monte Carlo. Esto es lo que hemos hecho para los propios puntos de la tabla 2.1, obteniendo como resultado el conjunto de valores de la table 2.2, donde el tamaño de la muestra utilizada no es exactamente el teórico, que aparece en la tercera columna, sino uno aproximado. En la última columna aparece el error relativo respecto al valor obtenido con una muestra grande (tabla 2.1) y que se mantiene dentro del margen de confianza del 5 % que se estableció para el cálculo del tamaño de la muestra. 22 Capı́tulo 2. Probabilidad de escape por el método de Monte Carlo Energı́a 0,32 0,34 0,36 0,38 0,40 0,42 0,44 0,46 0,48 0,50 0,52 0,54 0,56 p̄(H) Tamaño Probabilidad Error relativo 0,035930 1381 0,037013 0,030 0,178194 5626 0,219505 0,030 0,305268 8147 0,317511 0,010 0,418557 9349 0,417941 0,010 0,51806 9591 0,531043 0,030 0,603778 9190 0,614231 0,030 0,675710 8418 0,669305 0,009 0,733857 7503 0,718422 0,010 0,778218 6630 0,761250 0,004 0,808793 5941 0,770982 0,005 0,825583 5532 0,778700 0,007 0,828588 5456 0,771596 0,010 0,817807 5724 0,805948 0,010 Cuadro 2.2: Estimación de la probabilidad de escape mediante p̄(H) y su refinamiento con un tamaño muestral óptimo. En la última columna se recoge el error relativo, tomando como valor de referencia la probabilidad dada en la tabla 2.1. Si el valor de la tercera componente del momento angular se incrementa, el comportamiento observado, respecto a la probabilidad de escape, es similar. La diferencia ahora estriba en el hecho de que los puntos de equilibrio E3 y E4 se van acercando, al tiempo que sus energı́as cambian. Por este motivo, la energı́a de escape se ve afectada, que aumenta con Lz . Además, se vio que si Lz alcanza un valor crı́tico, los puntos de equilibrio E3 y E4 desaparecen, no pudiéndose hablar, en este caso, de un sistema con escape. Como ejemplo, en la figura 2.6 se representa la variación de la probabilidad de escape en función de la energı́a cuando Lz = 0,2. Como puede verse el comportamiento es similar al que aparece en la figura 2.5, con la única diferencia de los rangos de energı́a. Si Lz es mucho mayor, por encima del valor crı́tico, es decir cuando no hay un escape propiamente dicho, todas las órbitas consideradas en una cierta porción del espacio de fases escapan. 2.2.1. Muestra uniforme frente a muestra aleatoria Hasta ahora todas las muestras tomadas han sido uniformes, en el sentido de que los puntos seleccionados en el volumen fásico están igualmente espaciados en r y z, dentro del conjunto Er,z y en θ dentro del conjunto Sper ,pz . Esto permite elegir tamaños muestrales cercanos a un valor prefijado, 2.2. Cálculo de la probabilidad para Lz constante 23 P 0.8 0.6 0.4 0.2 ã 0.4 0.5 0.6 0.7 Figura 2.6: Probabilidad de escape cuando Lz = 0,2. jugando convenientemente con los espaciados. Es ası́ como hemos construido nuestras muestras. Inicialmente se ha elegido un espaciado para r y z dentro de Er,z . Una vez calculado el total de puntos N dentro de este conjunto se han elegido M puntos en Sper ,pz , de manera que N ×M sea un entero próximo al tamaño TM de la muestra y que exceda dicho valor. Este sistema de construcción de muestras puede no ser bueno, sobre todo cuando el tamaño de la misma es pequeño. La cuestión es que si el espaciado en r y z es muy fino, podemos tener muchos puntos en el conjunto Er,z , lo que obliga a tener muy pocos en Sper ,pz . Por tanto no estaremos muestreando convenientemente todo el volumen fásico y la probabilidad aparecerá falseada. En la figura 2.7 se ven dos muestras diferentes en Er,z . La primera es poco densa y requiere de un número de puntos alto en Sper ,pz . Por el contrario, la segunda es tan densa que no requiere más que de un punto en Sper ,pz . No obstante, la primera muestra va a ser más representativa que la segunda, ya que muestrea mejor el total del volumen. Consideremos un ejemplo, con H = 0,32, donde el tamaño de la muestra está en torno a los 1400 puntos y tomemos diferentes espaciados en r y z, haciendo que la densidad de puntos vaya en aumento y observemos qué ocurre. El resultado se ve en la tabla 2.3, en la que puede apreciarse que el aumento en la densidad de la malla en Er,z no contribuye a una mejor estimación de la probabilidad, debido a que el número de puntos en Sper ,pz disminuye, por lo que no tenemos un buen muestreo del volumen. De hecho, solo el valor dado en la primera fila está dentro del intervalo de confianza del 5 %. Por tanto, podemos ver que la elección de la muestra es un factor determinante para obtener una buena estimación de la probabilidad de escape. Por este motivo, y para evitar sesgos, se han construido muestras aleatorias, Capı́tulo 2. Probabilidad de escape por el método de Monte Carlo 0.6 0.6 0.4 0.4 0.2 0.2 0.0 0.0 z z 24 -0.2 -0.2 -0.4 -0.4 -0.6 -0.6 0.2 0.4 0.6 0.8 r 1.0 1.2 0.2 0.4 0.6 0.8 1.0 1.2 r Figura 2.7: Dos muestras de diferente densidad sobre el conjunto Er,z para una energı́a H = 0,32. de manera que minimicen una preferencia por determinados ángulos en el conjunto Sper ,pz . En concreto, hemos tomado ternas aleatorias (r, z, θ), con 0 < r < r2 , −1 < z < 1 y 0 ≤ θ < 2π, seleccionando aquellas para las que el par (r, z) está dentro del conjunto Er,z (ver figura 2.8). Con esta selección mostramos en la tabla 2.4 algunos de los valores que resultan para la probabilidad de escape, con el tamaño de la muestra. Como se ve no siempre se consigue que los valores se ajusten al dato tomado como referencia. No obstante, la dispersión de valores obtenida es menor que para muestras uniformes con diferentes densidades y la media de valores se aproxima al valor de referencia. En cualquier caso, si tomamos muestras aleatorias por encima del lı́mite superior del tamaño muestral en el peor de los casos, es decir cuando la probabilidad es 0,5, la dispersión es mucho menor y los valores obtenidos están, salvo contadas excepciones, dentro del intervalo de confianza del 5 %. Podemos concluir, por tanto, que a pesar de que la tabla 2.2 da unas estimaciones de la probabilidad de escape acordes con lo esperado, el resultado es dependiente de la manera de tomar la muestra. En este sentido, cuando la muestra es uniforme es preciso equilibrar la densidad en los conjuntos Er,z y Sper ,pz para que la muestra sea lo más representativa posible. Por otro lado, si la muestra es aleatoria, es preciso tomar varias muestras para obtener un valor promedio que se acercará al valor de referencia. En cualquier caso, si el tamaño muestral se elige por encima del valor máximo dado por la ecuación (2.1) los valores de probabilidad obtenidos están, ex- 2.2. Cálculo de la probabilidad para Lz constante Puntos en Er,z 77 96 125 173 252 393 702 1569 Puntos en Sper ,pz 20 16 12 8 6 4 2 1 25 Tamaño Probabilidad 1540 0,037013 1536 0,039714 1500 0,050667 1384 0,064306 1512 0,070767 1572 0,099873 1404 0,195157 1569 0,180370 Cuadro 2.3: Estimación de la probabilidad de escape para diferentes muestras uniformes, en función de la densidad de la misma en los conjuntos Er,z y Sper ,pz . ceptuando algunos casos aislados, dentro del intervalo de confianza esperado. Además los resultados mejoran cuando la probabilidad es relativamente alta, lo que significa que, a partir de un cierto nivel de energı́a, la probabilidad dada por la muestra óptima puede tomarse como una buena estimación de la probabilidad de escape. Tamaño muestra 1424 1519 1642 1637 Probabilidad 0,0377219 0,036866 0,033496 0,0403177 Cuadro 2.4: Estimación de la probabilidad de escape para diferentes muestras aleatorias para H = 0,32 y Lz = 0,1. Por último debemos decir que en ningún momento hemos hecho uso de las simetrı́as del problema. En concreto, las condiciones iniciales (r0 , z0 , pr0 , pz0 ), (r0 , −z0 , pr0 , pz0 ), dan lugar a órbitas simétricas respecto al plano z = 0. Es decir, bastarı́a tomar una muestra de la mitad del volumen fásico para estimar la probabilidad. En este sentido, si muestreamos la mitad del volumen, sin modificar el tamaño muestral, nuestra muestra serı́a en realidad dos veces mayor, ayudando a mejorar la representatividad de la misma y, por tanto, la estimación de la probabilidad de escape. 26 Capı́tulo 2. Probabilidad de escape por el método de Monte Carlo 0.6 0.4 z 0.2 0.0 -0.2 -0.4 -0.6 0.2 0.4 0.6 0.8 1.0 1.2 r Figura 2.8: Muestra de puntos tomados al azar, proyectada sobre Er,z , para una energı́a H = 0,32. 2.3. Probabilidad de escape con energı́a fija Otra cuestión que puede ser de interés en el estudio del escape es la influencia de un incremento del momento angular cuando la energı́a se mantiene constante. Debido al aumento de la energı́a de escape con el aumento de Lz , deberemos distinguir entre energı́as bajas y altas. Por ejemplo, si la energı́a elegida es 0,32, el aumento de Lz contribuye a disminuir la probabilidad de escape hasta hacerla cero, debido a que a partir de un cierto valor de Lz las curvas de velocidad cero son cerradas. Además, si seguimos incrementando el valor de Lz llegará un momento en que no existan órbitas con una energı́a tan baja. Para energı́as mayores, el efecto de un incremento de Lz es interesante, ya que tiende a estabilizar, e incluso disminuir, la misma, hasta que se sobrepasa el valor crı́tico de Lz , cuando todas las órbitas escapan. La figura 2.9 nos muestra el comportamiento de la probabilidad de escape para dos valores de la energı́a H = 0,48 y H = 0,58, en donde se aprecia claramente lo que acabamos de decir. Aunque inicialmente se observa un incremento de órbitas que escapan, luego se produce un amortiguamiento, hasta que, una vez superado el valor crı́tico de Lz la probabilidad aumenta hasta que todas las órbitas escapan. En cierto modo, lo que se observa es compatible con un resultado esperado y es que el momento angular actúa como un mecanismo de estabilización. No obstante, como la estructura del flujo fásico, regulada por los puntos de equilibrio, depende en gran medida del valor del momento angular, este 2.3. Probabilidad de escape con energı́a fija 27 p P 1.0 1.0 0.9 0.9 0.8 0.8 0.7 0.7 0.6 0.6 0.5 0.5 0.4 0.4 0.2 0.4 0.6 0.8 L 0.2 0.4 0.6 0.8 L Figura 2.9: Probabilidad de escape para H = 0,48 (izquierda) y H = 0,58 (derecha) en función de Lz . papel estabilizador queda diluido, ya que un aumento excesivo del mismo tiene como resultado la destrucción de zonas de movimiento confinado, que son las que se encuentran en torno al equilibrio de tipo centro, E3 . 28 Capı́tulo 2. Probabilidad de escape por el método de Monte Carlo Capı́tulo 3 Conclusiones En este trabajo se ha estudiado la probabilidad de escape en un sistema hamiltoniano simple de dos grados de libertad, mediante la aplicación del método de Monte Carlo. En concreto se ha estudiado un sistema galáctico que presenta varios canales de escape, aunque solo se ha tenido en cuenta el canal que se encuentra asociado al punto de silla situado en el plano galáctico, para unos ciertos valores de los parámetros del sistema. Las conclusiones más relevantes son las siguientes: Se ha estudiado la dinámica elemental del sistema en función de los parámetros que lo definen, en el sentido de que se han encontrado los puntos de equilibrio y sus propiedades de estabilidad lineal. Este estudio ha permitido determinar la existencia de canales de escape ası́ como la energı́a de escape. También se han estudiado las bifurcaciones, dando como resultado que los canales de escape se ven afectados por la variación de la tercera componente del momento angular. Se ha estudiado el mecanismo de escape, asociado a una órbita inestable de Lyapunov, que se ha determinado en primera aproximación. Se ha obtenido la probabilidad de escape mediante la toma de diferentes muestras uniformes de condiciones iniciales en el volumen fásico. Como resultado se ha visto que, a partir de un cierto número de condiciones iniciales, la probabilidad de escape se mantiene aproximadamente constante. Al mismo tiempo se observa, como era de esperar, que la probabilidad de escape aumenta con el aumento de la energı́a. Bajo la hipótesis de que el escape, para una condición inicial dada, sigue una distribución binomial, se ha determinado el tamaño de una muestra óptima, dentro de unos niveles de confianza preestablecidos. 29 30 Capı́tulo 3. Conclusiones Esto permite hacer cálculos de la probabilidad de escape con costes computacionales menores. Se ha analizado el tipo de muestreo, comparando los resultados ofrecidos por muestras uniformes y muestras aleatorias. Estas últimas son preferibles cuando el tamaño muestral no es muy grande. La variación del momento angular modifica la probabilidad de escape, de manera que un aumento moderado del mismo hace disminuir la probabilidad de escape. Sin embargo, un gran aumento del mismo tiene como resultado un aumento de la probabilidad de escape, que tiende a 1, a medida que nos acercamos al valor crı́tico de Lz en el que se produce una bifurcación silla-nodo. Como trabajo futuro queda pendiente el estudio del escape bajo otras configuraciones de los parámetros, ası́ como estudiar el papel jugado por los otros canales de escape, para energı́as más altas. Bibliografı́a [1] J. Binney, S. Tremaine. Galactic Dynamics, Princeton University Press, New Jersey, 1987. [2] J. Castañeda, L. De la Torre, R. Morán, R. Lara. Metodologı́a de la investigación, McGraw Hill, México, 2002. [3] G. Contopoulos. Order and Chaos in Dynamical Astronomy, SpringerVerlag, Berlin, 2002. [4] R. Cid, S. Ferrer. Geodesia geométrica, fı́sica y por satélites, Instituto Geográfico Nacional, Madrid, 1997. [5] W. A. Heiskanen, H. Moritz. Geodesia Fsica, Instituto Geogrfico Nacional e Instituto de Astronoma y Geodesia. Madrid, 1985. [6] W. Herschel. Astronomical observations and experiments tending to investigate the local arrangement of the celestial bodies in space, and to determine the extent and condition of the Milky Way, Philosophical Transactions of the Royal Society of London, Vol. CVII (107), 302–331, 1817. [7] E.P. Hubble. Cepheids in Spiral Nebulae, Pubs. Amer. Astr. Soc. 5, 261–264, 1925; reprinted in Observatory 48, 139–142, 1925. [8] C. Pérez. Técnicas de muestreo estadı́stico, Ed.Garceta, Madrid, 2010. [9] J.P. Salas. Escape e sistemas hamiltonianos simples: el papel del espacio fase, Anales de Fı́sica 95, 49–55, 2000. [10] N.J. Salkind. Métodos de investigación, Pearson Education, México, 1998. [11] J. Stoer, R. Bulirsch. Introduction to Numerical Analysis, SpringerVerlag, New York, 1980. 31