8. EQUILIBRADO DE ROTORES
Anuncio

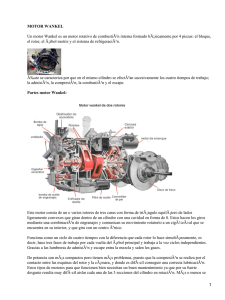
8. EQUILIBRADO DE ROTORES 8.1. Introducción En las máquinas con elementos rotativos no equilibrados se producen fuerzas de excitación armónicas sobre los apoyos, que son proporcionales a las fuerzas de inercia y crecen con el cuadrado de la velocidad angular. Habitualmente, un sistema desequilibrado se caracteriza por la existencia de vibraciones, ruidos, desgastes y, en general, por un mal funcionamiento. Para minimizar el efecto de las fuerzas de excitación es necesario añadir masas puntuales de equilibrado que compensen el efecto de las fuerzas de inercia de desequilibrio, de manera que los ejes y apoyos no reciban fuerzas de excitación o, al menos, éstas sean mínimas. La Figura 8.1 muestra un rotor que consiste en una masa M que rota a una velocidad ω. La fuerza de desequilibrio F que se transmite al eje puede eliminarse añadiendo otra masa M igual que compense el desequilibrio. F = Mω 2 r F Apoyos ω Eje Equilibrado Figura 8.1. Fuerzas provocadas por un rotor desequilibrado. 8.2. Teoría del equilibrado de rotores Consideremos el rotor representado en la Figura 8.2, con dos sistemas de referencia, uno inercial xyz y otro rígidamente unido al rotor xyz , que gira solidariamente unido a él con velocidad angular constante ω. © Alejo Avello, Tecnun (Universidad de Navarra). 176 Cap. 8: Equilibrado de rotores y y O ω x x z Figura 8.2. Sistemas de referencia de un rotor. Llamando R a la resultante de las reacciones en los dos apoyos podemos aplicar las ecuaciones de Newton al rotor, con lo que obtenemos R = M aG = M ω × ω × rG (8.1) donde aG es la aceleración del centro de gravedad del rotor y rG son sus coordenadas. La barra ( ) representa las coordenadas referidas al sistema de referencia del rotor. La ecuación (8.1) se puede escribir como 2 0 0 xG − M ω xG R = M 0 × 0 × yG = − M ω2 yG ω ω z 0 G (8.2) Esta ecuación muestra que las reacciones en los apoyos crecen con el cuadrado de la velocidad angular. También indican que para eliminar las reacciones dinámicas es necesario hacer que las coordenadas xG e yG sean nulas, es decir, que el centro de gravedad del rotor se encuentre en su eje. Cuando un rotor satisface esta condición se dice que está estáticamente equilibrado. Llamando N al momento de reacción resultante en los apoyos respecto al punto O, podemos escribir las ecuaciones de Euler con respecto al punto O como 0 I x N = ω × Io ω = 0 × − I xy ω − I xz − I xy Iy − I yz 2 − I xz 0 ω I yz − I yz 0 = −ω2 I xz I z ω 0 (8.3) Como se ve, N también crece con el cuadrado de la velocidad angular. Para que los momentos de reacción sean nulos es necesario que los productos de inercia I xz e I yz sean nulos. Cuando un rotor satisface simultáneamente la condición de que su centro de gravedad esté sobre el eje y que los productos de inercia I xz e I yz son nulos se dice que © Alejo Avello, Tecnun (Universidad de Navarra). Cap. 8: Equilibrado de rotores 177 está dinámicamente equilibrado y, en él, las reacciones en los apoyos son constantes e independientes de la velocidad de giro. Para equilibrar dinámicamente un rotor se utilizan dos masas puntuales situadas en la periferia del rotor de radio r, cuyo cometido es anular las reacciones dinámicas producidas por el desequilibrio. Para ilustrar gráficamente porqué son necesarias −al menos− dos masas y no basta con una, fijémonos en le Figura 8.3. En ella consideramos un rotor desequilibrado con un solo apoyo, sobre el que se han dibujado la fuerza R y el momento N de reacción que, como ya se ha dicho, son proporcionales al cuadrado de la velocidad angular y que giran con la misma velocidad que el rotor. Se coloca una masa m1 en la periferia de magnitud tal que equilibre la resultante R, de modo que R = m1ω2r x (8.4) y m1 m1 m2ω 2 r 2r m2 2r R z m2 N m2 α2 α1 z2 z1 R x ω y m1 m1ω 2 r N Figura 8.3. Fuerzas y momentos sobre un rotor. Figura 8.4. Fuerzas y momentos de equilibrio. De esta forma, el rotor queda estáticamente equilibrado pues la reacción R se compensa con m1ω2r . Ahora bien, además de R hay que anular N, lo que no es posible con la misma masa m1 , pues R y N están en un plano perpendicular al eje pero, en general, en direcciones arbitrarias. Para anular ambas simultáneamente es necesario utilizar una segunda masa m2 . Otra forma de demostrar que son necesarias dos masas para equilibrar dinámicamente un rotor es la siguiente: para anular la reacción R hay que hacer que el centro de gravedad del rotor se sitúe sobre el eje, y para anular N hay que hacer que los productos de inercia I xz e I yz sean nulos. Matemáticamente esto se puede expresar con las cuatro ecuaciones siguientes © Alejo Avello, Tecnun (Universidad de Navarra).