- Ninguna Categoria
SISTEMAS DE NAVEGACIÓN AÉREA II 3º AG
Anuncio
SISTEMAS DE NAVEGACIÓN AÉREA II 3º AG Sofía Urbina ATC. Gestión del tránsito aéreo. Provisión del servicio. CNS. Infraestructura, comunicaciones controlador-piloto. Comunicaciones. Enlace de voz piloto-controlador(es). Navegación. Guiado de las aeronaves. Vigilancia. Proporciona al proveedor del servicio información de las aeronaves en su sector. DPS. Sistemas de proceso de datos. Procesa información y la presenta adecuadamente. Sistemas CNS como apoyo al ATM. Estos medios cumplen un papel de apoyo y de suministro de información básica para que el desarrollo cotidiano de la navegación aérea sea posible. Se agrupan las infraestructuras técnicas sobre las cuales se sostiene el SNA. Para que una aeronave se mueva segura de un punto a otro debe mantener un contacto continuo con el servicio de control en tierra a través de las “comunicaciones”, utilizará los sistemas de navegación para conocer su posición en todo momento y para dirigirse al lugar deseado, mientras que el servicio de control en tierra utilizará los sistemas de vigilancia para tener a las aeronaves localizadas y evitar conflictos entre ellas. Las Comunicaciones Aeronáuticas proporcionan servicio a los otros dos componentes del SNA: DPS. Data Processing System. Estos sistemas tienen que intercambiar información tanto entre centros ATC como dentro de estos propios centros, para lo cual utilizan la infraestructura de comunicaciones. ATM. Air Traffic Management. Los controladores aéreos utilizan comunicaciones voz para dialogar con los pilotos y con otros controladores, para lo cual emplean la infraestructura de comunicaciones voz. Asimismo, las Comunicaciones Aeronáuticas también dan soporte a los otros dos elementos de la infraestructura CNS: SUR. Vigilancia. Las estaciones Radar utilizan redes de datos tierra/tierra para enviar información a los centros ATC. NAV. Navegación. Las radioayudas utilizan estos servicios como parte de su estructura de control y mantenimiento remoto. La Función de Vigilancia (como componente de la infraestructura CNS) proporciona los medios necesarios a la funcionalidad de vigilancia de los servicios de tráfico aéreo, permitiendo así visualizar la situación del tráfico. La vigilancia comprende todos los medios tecnológicos necesarios para proporcionar al sistema ATM información de posición y otros datos esenciales, incluyendo información meteorológica, de las situaciones de tráfico tanto en el aire como en tierra. Procesamiento de Datos. Dentro de la cadena o función de vigilancia se realizan múltiples operaciones de procesamiento y tratamiento de datos al objeto de mejorar en todo momento la información disponible y con seguir una presentación final óptima para el controlador. PSR. Radar primario. El blanco es pasivo. El eco es devuelto por reflexión en el blanco. Se conocerá la posición en 2D pero no la altura. Ventaja: no necesita colaboración de las aeronaves; es independiente. SSR. Radar secundario. Envía información, el blanco la procesa y envía una respuesta. El equipo de tierra funciona igual que el PSR. También será independiente, no necesita saber la información que se le responde. Es un sistema cooperativo, da información adicional: identificación y altura: posición en 3D. Multilateración. Vigilancia independiente, cooperativa. Antagonista del GPS. ADS. Vigilancia dependiente automática. La aeronave calcula la posición en el aire y envía su posición al control. Depende de la aeronave únicamente, ya que solo ella envía información. Las Comunicaciones Aeronáuticas proporcionan servicio a los otros dos componentes del SNA: DPS (Data Processing Systems): Estos sistemas tienen que intercambiar información tanto entre centros ATC como dentro de estos propios centros, para lo cual utilizan la infraestructura de comunicaciones. ATM (Air Traffic Management): Los controladores aéreos utilizan comunicaciones voz para dialogar con los pilotos y con otros controladores, para lo cual emplean la infraestructura de comunicaciones voz. Asimismo, las Comunicaciones Aeronáuticas también dan soporte a los otros dos elementos de la infraestructura CNS: SUR (Vigilancia): las estaciones Radar utilizan redes de datos tierra/tierra para enviar información a los centros ATC. NAV (Navegación): las radioayudas utilizan estos servicios como parte de su estructura de control y mantenimiento remoto. Comunicaciones voz T/A. Comunicaciones voz T/T. Comunicaciones datos T/A. Comunicaciones datos T/T. Entendemos por COMUNICACIÓN cualquier transmisión, emisión y recepción de signos, señales, escritos, imágenes, sonidos o informaciones de cualquier naturaleza. Cuando la comunicación se realiza a través de hilo, radioelectricidad, medios ópticos u otros sistemas electromagnéticos se denomina TELECOMUNICACION. En el ámbito aeronáutico las telecomunicaciones están reguladas por el Servicio Internacional de Telecomunicaciones Aeronáuticas (SITA). La finalidad de este servicio es proporcionar las telecomunicaciones y radioayudas necesarias para la seguridad, regularidad y eficiencia de la navegación aérea internacional. Los Servicios de Comunicaciones Aeronáuticas proporcionados por la Dirección de Navegación Aérea de Aena, son los siguientes: Servicio Móvil Aeronáutico (Servicio de Comunicaciones Tierra/Aire). Servicio Fijo Aeronáutico (Servicio de Comunicaciones Tierra/Tierra). Servicio de Radiodifusión Aeronáutica y Gestión de datos OPMET (datos operacionales meteorológicos). El Servicio Móvil Aeronáutico (SMA) es la parte esencial del servicio de comms T/A. Proporciona los medios técnicos para garantizar las comunicaciones de los Servicios de Control de Tránsito Aéreo con las aeronaves que operan dentro del Espacio Aéreo (comms ATC). Comunicaciones entre piloto y controlador relativas a: Informes de paso sobre puntos especificados. Cambios de altitud. Velocidad. El SMA permite el control del tránsito aéreo, estableciendo las comms en las diferentes fases de los vuelos: Control en Ruta en los espacios aéreos superior (ACC/U) e inferior (ACC/L). Control en las Áreas Terminales Principales (TMA) por los servicios de aproximación en los diferentes niveles de vuelo (APP/H, APP/I y APP/L). Control de Torre (TWR). Control de Movimientos en Superficie de Aeródromo (“Ground Movement Control”). Las comms del SMA se efectúan, principalmente, en la banda de VHF (117,975 MHz y 137 MHz). El SMA actualmente soporta comms analógicas (comms “voz”) que, paulatinamente, se convertirán en comms Aire/Tierra de datos (comunicaciones digitales) Otras bandas: HF de 2,8 a 22 MHz. / UHF 225 a 400 MHz. / 1,5 Ghz - 1,6 GHz (Vía satélite) El Servicio Fijo Aeronáutico (Servicio de comms Tierra/Tierra, ofrecido al Control de Tráfico Aéreo) se divide en dos grandes grupos: Comms T/T Datos. Abarca las comms a través de las redes de datos de toda la información aeronáutica vital para la navegación aérea: planes de vuelo, información AIS, datos meteorológicos aeronáuticos OPMET, instrucciones ATC, mensajes de la Administración Aeronáutica… Las Redes de datos son: Internacionales (Red CIDIN, TCIP, AMHS) Nacionales (REDAN en España, RINAL en Portugal, RENAR en Francia). Comms T/T Voz. Abarca las comms “orales directas” (SCV/SCO), que pueden ser: Telefónicas entre las diferentes dependencias Ruta, TMA, APP y Torre. Radio entre dependencias y centros Tx y Rx. Este servicio se sustenta en una red propia AGVCN (ATS GROUND COMMUNICATIONS NETWORK). Este servicio abarca todas las radiodifusiones de Información Aeronáutica normalizadas por OACI (FIS) y se aplica principalmente a: Servicio VOLMET. Proporciona a las aeronaves en ruta información meteorológica y operacional continua y actualizada, al menos cada 30 minutos, y desde seis aeropuertos, suficiente para cubrir cada una de las Áreas VOLMET fijadas en los Planes de Navegación Aérea de OACI. Servicio ATIS. Proporciona a las aeronaves, en fase de aterrizaje y/o despegue la información meteorológica del aeropuerto actualizada (en España cada diez minutos), la información operacional del mismo: pistas en uso, estado de las radioayudas, procedimientos ATC de “Entrada/Salida”, estado de las pistas, obstáculos, servicio contra incendios y otras informaciones operacionales significativas. Las radiodifusiones se efectúan en la banda VHF del SMA (entre las frecuencias de 117,975 MHz a 137 MHz). Actualmente en modo analógico y en frecuencias particularizadas para ATIS, tanto combinados “Salidas/Llegadas”, como diferenciados en “ATIS Llegadas” y “ATIS Salidas”. Los Servicios de Comunicaciones asociados a las distintas zonas del Espacio Aéreo son: Servicio de Control de Aeródromo (TWR). Servicio en ATZ. Servicio de Control de Aproximación (APP). Servicio en CTR. Servicio de Control de Área. Servicio en TMA/CTA y FIR. Básicamente, un sistema de comunicaciones está constituido por: Un centro emisión. Un centro recepción. Según la configuración, los centros pueden ser más o menos distantes uno del otro. Existen dos tipos básicos de centros de comms: Torre de Control de un aeropuerto (TWR): Servicio de Control de Aeródromo: control de las fases de despegue y de aterrizaje. En ocasiones, también Servicio de Control de Aproximación. Centro de Control en Ruta (CCR ó ACC): Servicio de Control de Área: Ruta. Servicio de Control de Aproximación: TMA (SID, STAR y APP). En un aeropuerto, los centros de comunicaciones emisión y recepción pueden estar ubicados: Los dos en la Torre de Control: problemas de cohabitación importantes. Un centro en la Torre (por ejemplo recepción) y un centro distante (por ejemplo emisión). La transmisión de las señales (audio, PTT, squelch) se hace generalmente por cables. En este caso, los problemas de cohabitación son de menor importancia. En un ACC, los centros de comunicaciones emisión y recepción están ubicados en centros remotos (CER). Estos CER pueden ser también de dos tipos: Centros emisión y recepción en el mismo edificio. Centros emisión y recepción separados. Entre el ACC y los CER, los soportes físicos pueden ser muy distintos: Enlaces por micro-ondas, línea satélite, cables, fibras ópticas … Solución Adoptada para comms T/A: Área Oceánica. Comms Voz HF. Comms por Satélite. Área Continental. Civil: Comms VHF. Militar: Comms UHF. La transmisión de audio o de datos que procede del SCV (Sistema de Conmutación de Voz), es decir el Centro de Control que se encuentra en la Torre, o en el ACC, se realiza a través de equipos emisores, operando sobre una frecuencia dedicada, en UHF o en VHF. La transmisión de una información, audio o datos, se hace por modulación de una señal portadora de frecuencia VHF o UHF. La modulación puede ser de amplitud, de frecuencia o de fase. Parámetros fundamentales de un emisor. Calidad (precisión y estabilidad) de la portadora. Potencia de salida del emisor, que tiene una relación directa con la visibilidad radio, es decir el alcance (así como la frecuencia de la portadora, el tipo de onda (de espacio, de tierra, de cielo), las antenas, el tipo de suelo (tierra, mar,…) y el entorno). Eficacia (asociada a la potencia de salida), que es la relación entre la potencia enviada sobre la carga de salida, y la potencia total recuperada sobre la fuente de alimentación. La recepción de audio o de datos que procede del centro de recepción hacia el SCV, se hace a través de equipos receptores, operando sobre una frecuencia dedicada, en UHF o en VHF. La recepción de una información, audio o datos, se hace por demodulación de una señal portadora en frecuencia VHF o UHF. La demodulación puede ser de amplitud, de frecuencia o de fase. Parámetros fundamentales de un receptor. Calidad (precisión y estabilidad) de la portadora. Sensibilidad. Se define como el nivel de la señal de entrada que da una relación S/R determinada. La sensibilidad del receptor está directamente relacionada con su figura de ruido. Además del ruido del propio receptor, la recepción puede verse perjudicada por un ruido ambiente adicional. Este procede de ruidos externos como los ruidos atmosféricos, los ruidos galácticos y los ruidos industriales. El nivel del campo de esos ruidos depende de: La ubicación geográfica del receptor. La hora del día y la temporada. La frecuencia operacional. Selectividad del receptor. Corresponde a la separación mínima entre dos frecuencias emitidas que el receptor puede distinguir sin perturbación. Actualmente, permite operaciones en canales de 25 kHz o 8,33 kHz. Existen dos tipos principales de propagación: Propagación guiada sobre una línea de transmisión. En este caso, el nivel de la señal disminuye exponencialmente con la distancia. Propagación radiada en el espacio. El nivel de la señal disminuye como el inverso del cuadrado de la distancia. A partir de cierta distancia, la atenuación es inferior a la del caso precedente, lo que permite comunicaciones de mayor distancia. La propagación de las ondas radioeléctricas consiste en el estudio de la potencia recibida por una antena, a partir de la potencia radiada por otra antena, para cualquier longitud de onda, cualquier distancia, y con todos los obstáculos que se puedan presentar: complejidad muy alta, no existe solución general. Es necesario simplificar el estudio: propagación en el espacio libre (medio isótropo, sin obstáculos). La teoría de la onda electromagnética traduce el efecto remoto de una intensidad alternativa recorriendo un conductor. Una intensidad i de frecuencia f transmitida a través de una antena produce una onda electromagnética definida por dos campos perpendiculares: un campo eléctrico, y un campo magnético. La onda electromagnética se propaga con una velocidad que depende del entorno, y de manera perpendicular al sentido de propagación. En la atmósfera, la velocidad de propagación corresponde a la velocidad de la luz. Este campo está radiado por una antena de transmisión, y puede inducir, a larga distancia, una intensidad en una antena recepción. Así se establece un enlace radioeléctrico. Si λ representa la longitud de onda del campo electromagnético, su fase varia cada 2π sobre la distancia λ. Sobre el eje de propagación, dos puntos a una distancia d van desfasados de un ángulo φ, tal como: φ . La potencia emitida se distribuye sobre áreas de onda aumentando aproximadamente el cuadrado de la distancia. La densidad de potencia disminuye como 1/d². La amplitud del campo electromagnético disminuye como 1/d. A la atenuación de propagación, se añaden otras formas de atenuación: Atenuación en dieléctrico, particularmente en el aire (pequeña). Atenuación en medios ionizados (variable). Atenuación en conductores donde la onda no se puede propagar (por ejemplo: la tierra, muy fuerte). En el espacio libre, la dirección de los campos E y H quedan fijos: propagación recta. Por convenio, la dirección de polarización es la de E. Horizontal: el campo E es perpendicular al plano vertical de propagación. Vertical: el campo E es paralelo al plano vertical de propagación. Alrededor de la tierra, se presentan tres modos de propagación. La onda terrestre o de superficie. La onda de cielo o ionosférica. La onda espacial. La onda terrestres (u onda de superficie) es una onda difractada por la tierra conductora, que de esta forma se propaga por detrás del horizonte radio. Características. Polarización vertical (E es perpendicular al conductor). Atenuación función de la frecuencia y del tipo de tierra (más pequeña para las frecuencias bajas y encima del mar). Uso: para frecuencias hasta algunos MHz. La onda de cielo (u onda ionosférica): Con la influencia del sol, las capas altas de la atmósfera se ionizan y se vuelven reflectantes para algunas frecuencias. Puede aparecer una propagación entre dos puntos que se encuentran sin visibilidad directa, por refracción total a una altura entre 70 y 500 km. Características. Reflexión función de la frecuencia (mas fácil a frecuencias bajas, por debajo de 30MHz), de la ionización (hora, día, noche, temporada, latitud), y del ángulo de incidencia (imposible si el ángulo es demasiado pequeño; por esta razón aparece una zona de silencio onda de cielo alrededor del transmisor). Polarización dada, que se transformará en la ionosfera en polarización elíptica. Atenuación reducida, dependiendo principalmente de la absorción en las capas (más fuerte de día sobre las frecuencias medias). Amplitud y fase del campo variable en el tiempo, según la modificación permanente de la ionización. La onda de cielo se propaga por reflexión a través de las capas ionosféricas. No existe para todas las frecuencias, y depende de la actividad solar, que ioniza esta parte de la atmósfera. Es una onda directa entre dos puntos en visibilidad radioeléctrica. Características Valor del campo muy estable. Polarización fija (proporcionada por la antena transmisión). Atenuación pequeña (aprox 1/D). Considerando una tierra esférica, entre dos antenas en tierra, la visibilidad radioeléctrica es función de la altura de las dos antenas emisora y receptora. Entre la tierra y un avión, es función de la altura del avión. La onda de espacio se propaga de manera directa, en la atmósfera. Llega al receptor, bien directamente o después de una reflexión en tierra o sobre un obstáculo. Con la onda directa, una onda reflejada por la tierra puede interferir: al nivel de un receptor en movimiento aparece un campo resultante variando entre un mínimo y un máximo (debido a una variación de fase entre los dos campos). Debajo, la variación de amplitud del campo resultante en relación con la recepción de la onda directa y de la onda reflejada: fenómenos de “fading” o desvanecimientos. Parámetros que influyen en la onda reflejada. Factor de reflexión en el suelo, que depende del ángulo de la onda sobre el suelo, de la polarización de la onda, horizontal o vertical, del tipo de suelo (tierra, mar,…). Irregularidades del suelo (criterio de Rayleigh : la altura de las irregularidades deben ser entre 100 y 1000 veces mayor que la longitud de onda para influir). Dimensión del la zona reflectante (zona de Fresnel). La onda se refleja mas o menos. Curvatura de la tierra. Un factor de divergencia inferior a la unidad se multiplica por el factor de reflexión, reduciéndolo. Interferencia de los diferentes modos: Onda directa – onda de tierra (o de cielo): la onda directa es siempre más importante. Onda de tierra – onda de cielo: interferencias a partir de una cierta distancia dando un fenómeno de fading (variación del campo resultante entre valores mínimo y máximo: extinciones o desvanecimientos momentáneos). A las frecuencias medias (300 kHz – 3 Mhz), la zona de fading puede recorrer de 200 a 500 km desde el transmisor. ONDAS KILOMÉTRICAS (30 – 300 KHZ) : Buena propagación de la onda difractada (onda de tierra), casi independiente del tipo del suelo y de los obstáculos. A largas distancias, se añade la onda indirecta (onda de cielo). Se utilizaba mucho antes para telegrafía intercontinental. Hoy, se utilizan para señales horarias, radionavegación y radiodifusión. Se puede utilizar también con los submarinos (algunos metros debajo de la superficie del mar). Inconvenientes: -La absorción puede ser importante durante el día. -Los parásitos atmosféricos y ruidos industriales importantes hacen que se necesiten emisores muy potentes. ONDAS HECTÓMETRICAS (300 KHZ – 3 MHZ) : La propagación de la onda difractada (onda de tierra) disminuye, más a tierra que sobre el mar. es la más importante en verano a las doce y a pequeñas distancias. Después, la onda indirecta (onda de cielo) vuelve a ser la más importante, pero no está muy estable. Da un campo bastante fuerte de noche. La parte alta se utiliza en radiodifusión con los barcos, porque tiene una buena propagación sobre el mar, y no necesita antenas largas. Inconvenientes: -Los espurios atmosféricos y ruidos industriales importantes hacen necesarios siempre emisores potentes. ONDAS DECAMÉTRICAS (3 – 30 MHZ) : Corresponden a las « ondas cortas » para transmisiones a largas distancias, y utilizando las reflexiones sobre la ionosfera (onda de cielo). Los espúrios atmosféricos son bastante pequeños. Inconvenientes: -« fading » debido a las irregularidades de la ionosfera. -Interferencias mutuales porque una potencia muy pequeña transmitida casi a los antípodas puede constituir una interferencia importante. ONDAS MÉTRICAS (30 – 300 MHZ) : Se limitan a propagación en visibilidad (onda de espacio directa), o en difracción a tierra o sobre obstáculos. Se utilizan para programas de televisión, comunicaciones entre móviles, y comunicaciones punto a punto. Los espúrios atmosféricos son casi inexistente. Inconvenientes: Espurios industriales que pueden ser influyentes. ONDAS DISIMÉTRICAS (300 MHZ – 3 GHZ) : Los fenómenos de difracción se vuelven de menos importancia. Se utilizan en propagación en visibilidad (onda de espacio directa), o en difusión troposférica. Son utilizadas para televisión, enlaces de micro-ondas, radares y radionavegación. Los espurios atmosféricos o industriales son casi inexistentes. La sensibilidad de los receptores està limitada por su propio ruidotérmico. ONDAS CENTIMÉTRICAS (3 GHZ – 30 GHZ) : Se utilizan casi solamente en visibilidad directa (onda de espacio directa). Son utilizadas para enlaces de micro-ondas, radares y comunicaciones con satélites. ONDAS MILIMÉTRICAS ( > 30 GHZ): Se utilizan solamente en visibilidad directa (onda de espacio directa), y están limitadas por la absorción atmosférica. Son utilizadas para investigaciones experimentales (radares y radioastronomía). LA TROPOSFERA : Es una capa variable de la tierra de 7 km en el polo, y 15 km en el ecuador. La propagación VHF y UHF se hace en esta parte de la atmósfera. LA ESTRATOSFERA : Es una capa entre 15 y 60 km de altura. La propagación en esta capa se hace como en el vacío, es decir sin ningún cambio. LA IONOSFERA : Es una capa entre 60 y 1000 km, que puede ser ionizada por los rayos UV del sol. La ondas HF (debajo de 20 MHz) son reflejadas por este capa, y constituyen ondas de cielo. Generalmente, las frecuencias UHF y VHF no son reflejadas por esta parte de la atmósfera. Los servicios de comms asociados a las distintas zonas del espacio aéreo son: Servicio de Control de Aeródromo (TWR). Servicio en ATZ. Servicio de Control de Aproximación (APP). Servicio en CTR. Región de información en vuelo (FIR): Espacio aéreo de dimensiones definidas dentro del cual se proporcionan los servicios de información en vuelo y de alerta. Incluye: Aerovías o rutas controladas. Rutas asesoradas. Área de Control (CTA): Espacio aéreo controlado que se extiende desde una determinada altura hacia arriba. Zona de Control (CTR): Espacio aéreo controlado que se extiende desde la superficie terrestre hacia arriba. Zona de Tránsito de Aeródromo (ATZ): Espacio aéreo donde se facilita servicio de control para el tránsito de aeródromo. Este servicio de comunicaciones T/A ofrece desde cinco centros de control. Se utiliza para ello una red de treinta y tres centros remotos de comunicaciones (civiles y militares), que proporcionan cobertura radio en la mayor parte del espacio aéreo de ruta. En ciertos sectores se utilizan técnicas de frecuencia desplazada para poder garantizar la cobertura exigida. Además, para cada sector de control de ruta existe una redundancia de equipos dentro del propio centro de comunicaciones, así como de estaciones de comunicaciones. Regiones de información en vuelo (FIR) en el SNA español: FIR Madrid (ACC Madrid y ACC Sevilla). FIR Barcelona (ACC Gavá y ACC Palma). FIR Canarias (ACC Canarias). El servicio de comunicaciones T/A en TMA se facilita desde los centros de comms locales o desde los aeropuertos englobados en los diferentes TMA. Los TMA principales (“Major TMA”) españoles son: Madrid, Barcelona, Palma de Mallorca y Canarias. Otros TMA importantes (con frecuencias y emplazamientos asignados) son: Galicia, Sevilla, Zaragoza y Valencia. Para el resto de TMAs las frecuencias y emplazamientos asignados son los del aeropuerto. Las frecuencias VHF/UHF que se utilizan en los aeródromos están asignadas a los servicios locales siguientes: Aproximación: Dedicada a las aproximaciones al aeródromo, desde el momento en que se produce la transferencia entre una oficina APP y la Torre de Control. Rodadura: Dedicada a la rodadura en pista y por calles de rodaje. Emergencia: Dedicada a las situaciones críticas. Autorizaciones: Dedicada a concesión de permisos tales como puesta en marcha de motores. Otros: Dedicadas a escuelas de pilotos, aeroclubes, etc. La propagación de las ondas UHF y VHF utilizadas en radiocomunicación o radionavegación se produce en la capa troposférica y en tipo de onda de espacio directa. Se debe estudiar la distancia directa hasta el horizonte visual como una función de la altura de los puntos de partida y de llegada de la onda electromagnética. Inicialmente, se supone que la curvatura de la tierra es el único problema de la limitación de visibilidad. Condiciones de propagación. Efectos del terreno. Características eléctricas (sólo para f < 30 MHz) y orografía del terreno. Efectos troposféricos. Gases de la atmósfera influyen en absorción de energía y en índice de refracción. Trayectorias múltiples. Suma de ondas reflejadas (distintas fases y amplitudes) a la onda directa. Ruido. Artificial o natural Suponemos un punto B de altura H, encima de la tierra, de radio R. La visibilidad óptica d, entre los puntos B y A, vale (R + H)² = R² + d² Considerando que H << R,, d = Para la tierra, R = 6300 km, lo que da: d(km) = Durante la propagación en la troposfera, la onda sufre una serie de refracciones cuyo efecto es una curvatura de su camino, de tal forma que va mas allá de la vertical (suponemos la troposfera como una suma de capas por las cuales el índice de refracción disminuye con la altura). Así, la visibilidad resulta ligeramente aumentada, y por ello tenemos: d(km) = 4,1 En el caso de dos estaciones en tierra, tenemos: d(km) = d1 + d2 =4,1( )+ ) Visibilidad radio en terreno montañoso. El nivel de vuelo al que la estación presenta visibilidad es: FL = AB + BC + CD AB ~ d2 / 2R BC ~ H / cos w ~ H CD ~ d · tan FL = d2 / 2R + H +d · tan Por tanto: d = - R · tan + En realidad, para considerar que existe visibilidad radioeléctrica entre dos puntos para una frecuencia (es decir una longitud de onda determinada), los fenómenos de difracción por obstáculos eventuales situados cerca del trayecto, han de tener una influencia despreciable sobre el nivel recibido. Se demuestra que para conseguir esta condición ningún obstáculo ha de estar presente en el interior de un elipsoide de revolución, llamado primer elipsoide de Fresnel: Focos: antenas emisora y receptora. La suma de las distancias entre un punto de la elipsoide y las antenas supera en media longitud de onda la distancia directa entre las dos antenas (es decir una fase opuesta entre el camino más corto, y más largo). Si E representa la antena emisora, R la antena receptora, y M un punto del elipsoide, tenemos la relación: EM + MR = ER + λ/2 Este elipsoide tiene una forma muy extendida. Esta condición de despeje implica elevar más o menos las antenas según la frecuencia (más baja la frecuencia, más alta ha de ser la ubicación de las antenas). Para F = 300 MHz ,, λ=1m ,, d = 200 km Tenemos λ Para definir la cobertura radioeléctrica de un equipo de radionavegación, la OACI utiliza densidades de potencia expresadas en W/m² o dBW/m². En un entorno homogéneo e isotrópico, la relación entre los campos eléctrico E y magnético H es constante, y se llama impedancia de onda: Z = E/H = = 120π Ω con = permeabilidad del vació = permitividad del vació. La densidad de potencia vale: p(W/m²) = E(V/m).H(A/m) Así, si se utiliza la impedancia de onda: p(W/m²) = E²(V/m) /120π. La potencia recibida sobre una antena se calcula como el producto entre la densidad de potencia y la superficie efectiva de recepción de la antena. Para una antena isotrópica, la superficie de recepción vale: λ²/4π Así, la potencia recibida vale: Pr(W) = p(W/m²).(λ²/4π) TRANSMISIÓN. Suponemos una antena isotrópica radiando una potencia Pe bajo forma de onda esférica. Hay una distribución uniforme de la potencia sobre toda la superficie de una esfera centrada sobre la antena y de radio D, que corresponde a la distancia entre la antena emisión y el punto de recepción. Densidad de potencia: p = Pe / S,, con S = 4πD² para una esfera. Así: p(W/m²) = Pe / (4πD²) RECEPCIÓN. Si Pr representa la potencia recibida sobre una antena a la distancia D de la estación de transmisión, tenemos: Pr = p.(λ²/4π) Pr = Pe.[λ/(4πD)]² ecuación de las telecomms Notas: La atenuación de potencia varía como 1/D², es decir que el campo eléctrico varía como 1/D. La potencia recibida disminuye cuando la frecuencia aumenta (es decir cuando la longitud de onda λ disminuye). La relación entre Pr y Pe se da generalmente en dB : AdB =10log(Pr/Pe) Así, utilizando la ecuación de las telecomms: AdB = 20log[λ/(4πD)] = -32,44 - 20log[f(MHz)] - 20log[d(Km)] Casos particulares: Para D = λ,, Para D‟ = 2D,, AdB = 22dB. A‟dB = AdB - 20log2 A‟dB = AdB - 6dB ATENUACIÓN POR DIFRACCIÓN. El modelo sencillo de óptica geométrica indica que no hay propagación detrás de los obstáculos. Recurriendo a un modelo más perfecto se comprueba que sí es posible. Se considera visibilidad directa si no hay ningún obstáculo dentro de la primera zona de Fresnel. Se denomina despejamiento a la distancia entre el rayo directo y el reflejado. La zona correspondiente a propagación por difracción se corresponde con En radioenlaces suele trabajarse con la gama . ELIPSOIDE DE FRESNEL. Distancia entre caminos: Radio de la zona de Fresnel „n‟. El efecto de un obstáculo depende de su situación dentro de las zonas de Fresnel. Influencia de un obstáculo dentro del elipsoide de Fresnel : Se supone un obstáculo de altura H(m), d1 = distancia entre la antena de emisión y el obstáculo (km). d2 = distancia entre el obstáculo y la antena de recepción (km). Se define el parámetro: λ Se deduce que: . f en MHz. La atenuación por difracción es: Mitigación de la atenuación: Esta atenuación adicional aumenta muy rápidamente cuando la distancia del obstáculo a una antena disminuye. Por ello se necesita tener antenas de emisión y recepción sin ningún obstáculo en su entorno próximo. Como la distancia del horizonte radio es proporcional a la de la estación a tierra y del avión, los puntos geográficos más altos son de mayor interés para instalar antenas. Atenuación en el espacio libre: aplicable solamente hasta el horizonte radio. Zona de 40 a 50 km detrás del horizonte radio: La atenuación depende del tipo del suelo, de la longitud de onda de la señal, y de la polarización de la onda. La atenuación por difracción vale aproximadamente -0.81 dB/km. Por ejemplo, a una distancia de 45km, la atenuación vale del orden de –36 dB. Más lejos es una atenuación por difusión, aproximadamente de -0.1 dB/km. SENSIBILIDAD DE LOS RECEPTORES. Una señal recibida puede ser utilizada solamente si su nivel es superior al nivel de ruido de la instalación, lo que es definido por una relación de Señal a Ruido S/R. La sensibilidad de un receptor es su capacidad para detectar la señal en presencia de ruido. Es decir, será más sensible, cuanto menor sea la S/R necesaria para decodificar una señal. OACI establece los siguientes valores: Receptor de tierra: S/R > 15 dB para una intensidad de campo de 20 mV/m (-120 dBW/m2) Receptor de a bordo: S/R > 15 dB para una intensidad de campo de 75 mV/m (-109 dBW/m2) No obstante, en la práctica: Equipos de tierra: Tx = 50 W (47 dBm) y Rx = 1,5 mV (-103 dBm) Equipos de a bordo: Tx = 20 W (43 dBm) y Rx = 3,0 mV (-97 dBm) RUIDO EN LOS RX. El ruido tiene dos componentes: Ruido externo. Ruido en el receptor. Potencia de ruido en el receptor: La ecuación de la potencia de ruido es: PR = K.T0.ΔF con K = constante de Bolzmann T0 = temperatura en °Kelvin ΔF = ancho de banda del receptor Por una temperatura ambiente de 20°C, (K = 1.37.10-23 J/°K), tenemos: PR(W) = 4.10-21.ΔF , es decir: PR(dBm) = 10log(4.10-18.ΔF) Para reducir la potencia de ruido a la entrada de un receptor, se puede actuar solamente sobre el ancho de banda. Supongamos un Sector del Espacio Aéreo A-E, que da servicio desde un determinado FL (línea verde): El Centro de Emisores 1 proporciona cobertura en línea de vista sólo en A-B En el tramo B-C, se obtiene comunicación por difracción. Posiblemente, en el tramo C-D pueda haber comunicación por dispersión troposférica (difusión). En el tramo D-E no llegará señal en ningún caso. Es necesario otro centro de emisores para cubrir el resto del sector (C-E) Problemas asociados a dos Centros de Emisores: Si transmiten en la misma frecuencia, a la aeronave le llegarán dos señales desfasadas en el tramo B-D: ruido, interferencias, difícil decodificación: señal no válida. Si transmiten en diferentes frecuencias, supondría dividir el sector en dos. Excesiva sectorización y demasiados controladores necesarios. Solución: Frecuencias desplazadas. Al objeto de dar servicio de comunicaciones a lo largo de todo un sector con orografía difícil se pueden utilizar dos o más centros de emisores: Transmitirán a frecuencias muy próximas, por encima y por debajo de la portadora asignada al canal característico del sector. La operación es posible gracias al “efecto captura” del receptor: Éste sólo toma en consideración la señal más intensa de las portadoras incluidas dentro del ancho de banda del canal (25 KHz). La separación de las frecuencias de transmisión debe ser suficiente para que el filtro paso banda del receptor pueda aislarlas. El funcionamiento de este tipo de sistemas viene condicionado por las características primordiales de las señales utilizadas: Ancho de banda de la transmisión. Estabilidad de la frecuencia de portadora. Las comunicaciones T/A están basadas en una portadora modulada en amplitud por la señal a transmitir. La señal resultante es una suma de tres frecuencias: Portadora (Fc) Banda Lateral Superior (Fc + fm), siendo fm la frecuencia de la señal moduladora. Banda Lateral Inferior (Fc – fm) Anchura de banda de la transmisión: DF = Fc± fm Generalmente la transmisión (voz) tiene una frecuencia máxima de 3 KHz (fm). Estabilidad de la frecuencia portadora. Normalmente la frecuencia de portadora no es constante, sino que varía dentro de pequeños márgenes. Los equipos tienen una estabilidad de, al menos, 5 partes por millón (5x10-6). Para la frecuencia central de la banda de Com en VHF (130 MHz), esto supone una variación máxima de 0,65 KHz. El ancho de banda total será, por tanto, de: Fc± 3,65 KHz Los canales de comunicaciones T/A están separados 25 KHz. Los sistemas de frecuencias desplazadas utilizan dos o más portadoras. Cada portadora utiliza un ancho de ± 3,65 KHz. Por tanto, sólo podrán funcionar un máximo de tres frecuencias: 25 KHz / 7,3 KHz = 3,1 Sistemas de dos portadoras: Las dos portadoras estarán desplazadas ± 5 KHz respecto a la frecuencia central del canal. Sistemas de tres portadoras: Una de las portadoras tendrá la frecuencia central del canal. Las otras dos portadoras estarán desplazadas ± 7,3 KHz respecto a la frecuencia central del canal. Las dos portadoras estarán desplazadas ± 5 KHz respecto a la frecuencia central del canal. Una de las portadoras tendrá la frecuencia central del canal. Las otras dos portadoras estarán desplazadas ± 7,3 KHz respecto a la frecuencia central del canal. En el enlace aeronave-tierra la aeronave transmite en una única frecuencia, que puede llegar a ambos centros de comunicaciones en tierra. Como consecuencia las señales de audio procedentes de los receptores de ambas estaciones llegan simultáneamente al centro de control. El problema es enviar una señal única e inteligible al Centro de Control. Para ello, ambas señales se envían a un dispositivo (UIS) que selecciona entre ambas la de mejor relación Señal/Ruido. PROBLEMA: número de frecuencias disponibles para COM T/A es muy limitado. Este problema se da sólo en las zonas de más tráfico. Limita el crecimiento de la sectorización ATC en esas zonas. Imprescindible resectorización para aumentar capacidad. OBJETIVO DEL PROGRAMA: aumentar la capacidad del espectro de VHF mediante la obtención de nuevas frecuencias a utilizar. Esto posibilita: La creación de nuevos sectores de control. Aumento de la capacidad ATM. Por cada frecuencia 25 kHz convertida a 8,33 kHz se liberan 2 frecuencias de 8,33 kHz. Septiembre 1994: OACI recomienda la introducción de la separación de canales de 8,33 kHz. 7 Octubre 1999: 7 países inician la implementación de frecuencias 8,33 kHz en sectores de control de ruta por encima de FL245. Mayo 2002: Propuesta francesa de Expansión Vertical. 31 Octubre 2002: Comienzo del Programa Expansión Horizontal en 22 HEX Países (supresión de exenciones y comienzo de conversión de frecuencias). CONF. ACTUAL DEL SM AERONÁUTICO DE RUTA Generalmente, cada sector de control donde se proporciona servicio ATS tiene asignada una frecuencia en VHF. Dicho sector se cubre con una única frecuencia radio instalada en dos emplazamientos diferentes (doble cobertura). Cuando esto no es posible se hace uso de la técnica de Frecuencias desplazadas (+/-5kHz) en otros emplazamientos diferentes. Esta técnica es incompatible con la aplicación de la separación 8,33 kHz. La Expansión Horizontal implica la conversión de frecuencias a 8,33 kHz en Sectores de Control de Ruta a partir de FL245. A partir del 31 Octubre 2002 será mandatorio para todas las aeronaves que operen por encima de FL245, poseer equipos de comunicaciones radio compatibles con separación de 8,33 kHz entre canales. Los 22 países HEX planean realizar 61 conversiones de frecuencias de 25 a 8,33 kHz. España ha realizado 10 conversiones desde Octubre 2003. El grupo HLCG (High Level Communications Group) de EUROCONTROL solicita la aprobación para comenzar la implementación de la Expansión Vertical. Propuesta francesa, pues su EAS comienza en FL195 y no en FL245 Se plantean, principalmente, 2 tipos de escenarios: Esc.1 Implementación en FL > 195. Esc.2 Implementación en FL>195 y principales TMA/CTAs. SITA es una compañía de carácter internacional, proveedora de servicios globales de comunicaciones de voz y datos para compañías aéreas. El servicio de comunicaciones de datos de SITA, denominado “AIRCOM Datalink Service”, proporciona un servicio móvil de comunicaciones para las aerolíneas a través de estaciones radio VHF y satélite. El protocolo del enlace de datos de SITA se denomina ACARS (“Aircraft Communications Addresing & Reporting System”), que permite intercambiar mensajes entre las aeronaves y su centro de operaciones en tierra a través de la red SITA con información relativa a hora de despegue y aterrizaje, gasto de combustible, retrasos, desvíos, … En la actualidad se está produciendo la migración del protocolo ACARS al VDL Modo2. El VDL (VHF Data Link) ha sido adoptado por EUROCONTROL para soportar los nuevos servicios ATS. El resultado que se obtendrá una vez finalizada la migración será una mejora global del servicio, particularmente en los aspectos siguientes: Reducción de la congestión de los actuales canales voz. Reducción de los errores de comunicación. Aena firmó un acuerdo con SITA a finales de 2002 para la instalación de estaciones VDL (“VHF Data Link”, Enlace de Datos en VHF) en algunos aeropuertos: conexión a la red global de SITA. Aena es la propietaria de esta infraestructura. ARINC es una compañía de carácter internacional proveedora de servicios globales de comms de voz y datos para compañías aéreas. El servicio de comunicaciones ARINC es similar al de SITA, está basado en la utilización del protocolo ACARS, el enlace entre estaciones terrestres se realiza en la banda de frecuencias en VHF. Aena suscribió en el año 2001 un acuerdo con ARINC, para el despliegue de estaciones VDL. El acuerdo contempla que Aena se convierte en proveedor de emplazamientos VDL y servicios T/T. Se utiliza REDAN para la conexión entre las estaciones de Aena al punto de conexión ARINC en España. Las dimensiones de estas servidumbres son las siguientes: La zona de seguridad para enlaces hertzianos entre dos instalaciones será la intersección con el terreno del cilindro cuyo eje será la vertical por el centro de la base de cada antena y 200 m de radio. La zona de limitación de alturas tendrá forma rectangular, simétrica respecto de la línea que une ambas estaciones, con una anchura total de 2×d metros, siendo: Con D = distancia entre estaciones, en Km. f = frecuencia más baja del enlace, en MHz. En este caso, la superficie de limitación de alturas será el plano inclinado perpendicular al plano vertical que une ambas instalaciones. Su traza sobre éste estará “d” metros por debajo de la línea de unión de las antenas de las estaciones. El continuo crecimiento de la actividad aeronáutica lleva aparejado un aumento de las prestaciones que han de suministrarse desde tierra a partir de las dependencias de control, los centros de comunicaciones, las torres y los centros de aproximación. Todo ello conlleva, a su vez, un aumento de canales radio y de equipos transmisores y receptores que han de dar servicio a estos canales. Cada nueva frecuencia incrementa la probabilidad de que alguna combinación de las mismas pueda causar problemas de interferencias. En ciertos casos, la instalación en un mismo emplazamiento de emisores y receptores con antenas muy próximas puede resultar problemática. Si a lo anteriormente mencionado se suman las emisiones de estaciones terrestres destinadas a servicios de radiodifusión, policía, bomberos, etc., en frecuencias VHF, se comprende la gran probabilidad de que se produzcan interferencias en dicha banda. En un sistema de comunicaciones de radio, los requisitos de incompatibilidad electromagnética exigen que las características de los receptores no sean degradadas con respecto a receptores utilizados de forma aislada. Dicha degradación se puede producir por varios factores como pueden ser: características de los equipos radio, parámetros del sistema (aislamiento entre antenas o separación entre frecuencias), condiciones del entorno (ruido natural y artificial) y por último por transmisiones y recepciones simultáneas. En resumen, se pueden considerar las siguientes causas de degradación en los sistemas de comunicaciones: Señal adyacente (señales de canales diferentes con una frecuencia próxima a la señal deseada). Radiaciones no esenciales de transmisor. Respuestas espurias del receptor. Intermodulación en transmisores (IMT). Intermodulación en receptores (IMR). Se consideran frecuencias espurias todas aquellas que están a ambos lados de la frecuencia central, hasta ±10 Mhz. ahora bien hay que distinguir: Frecuencias adyacentes que son aquellas que están dentro del margen del canal o canales adyacentes, es decir de ± 25 Khz hasta ± 5 Mhz. (éstas son las más importantes). A partir de aquí se consideran como espurias propiamente dichas. Como alteraciones más importantes de interferencia en el sistema por señal adyacente caben citar los efectos de: Modulación cruzada. Reducción de la sensibilidad del receptor. Saturación del receptor. Efectos de banda ancha del transmisor. La MODULACIÓN CRUZADA es un efecto no lineal que resulta en la transferencia de modulación de una portadora de señal de interferencia a una señal deseada, cuando la separación entre la señal de interferencia y la deseada es pequeña. Los efectos de la modulación cruzada tienen lugar en el mezclador y el primer paso de FI. Los factores que afectan a este tipo de moduladores son comunes a los que producen desensibilización o saturación de los receptores. Este tipo de interferencias se encuentra generalmente cuando a la entrada de un receptor llegan señales fuertes procedentes de uno o varios transmisores próximos. Los efectos producidos por la modulación cruzada pueden eliminarse intercalando un filtro selectivo a la entrada del receptor para atenuar la señal interferente y disponiendo de una buena protección entre los pasos de FI. Se define la DESENSIBILIZACIÓN DE UN RECEPTOR como un cambio (generalmente reducción) en la salida de potencia de la señal deseada o la reducción de la relación señal/ruido. Es debido a una señal no deseada en una frecuencia próxima a la del propio receptor. En general la curva de respuesta de un amplificador es lineal, pero a partir de cierto nivel de salida, la curva deja de ser lineal y la distorsión aumenta hasta un punto de ganancia prácticamente nula. Si el amplificador corresponde a la entrada de un receptor, se dice que éste se halla saturado. Cuando una señal o señales no deseadas, pasan las protecciones de entrada, llegan al primer amplificador, y se suman a la señal deseada, pueden producir un fenómeno de saturación, incrementando el ruido. Para evitar estos problemas, al diseñar el receptor deberá prestarse una atención especial al sistema de protecciones de entrada y sobre todo al sistema de la FI. Las radiaciones no esenciales del transmisor se producen en frecuencias radiadas por el transmisor, dentro de la banda de frecuencias utilizadas y diferentes a su frecuencia fundamental fo. La frecuencia fundamental de salida de un transmisor se genera por multiplicación de la frecuencia del oscilador local, que suele ser un oscilador de cristal. Un cristal además de su frecuencia de resonancia, puede tener otras u armónicos, que a través de los pasos multiplicadores, pueden llegar a la salida de éste en forma de espurios. A su vez pueden alcanzar un nivel suficiente como para producir interferencias en receptores próximos. Una manera de resolver este problema es obtener la señal deseada directamente en la frecuencia final, utilizando un modulador vectorial para generar señales de banda base en fase y cuadratura para modular directamente una portadora en la frecuencia de salida. Las respuestas espurias del receptor, se producen generalmente en el mezclador, que es un elemento no lineal. Dependiendo de la estabilidad del oscilador local, pueden salir de este señales espurias, que al mezclarse con la señal de la frecuencia fundamental darían lugar a otras señales próximas a la frecuencia intermedia. Pueden llegar hasta el detector, y por tanto a la salida del receptor, bien en forma de una señal que degrada la fundamental o bien en forma de ruido que degrada la misma. Otro problema que se genera en el mezclador es debido a la presencia de la frecuencia imagen, cuya cancelación se tiene muy en cuenta a la hora de diseñar un equipo de comunicaciones, mediante el empleo de filtros adecuados. Esto ocurre cuando una señal interferente (fs) de suficiente nivel, atraviesa las protecciones de entrada y llega al mezclador para batirse con la señal del oscilador local (fol) y con la señal portadora fo, dando como resultado la frecuencia intermedia, con lo cual el receptor la aceptará como propia. Los productos de intermodulación a la frecuencia fIM se producen por las no linealidades del amplificador de salida del transmisor y de los diferentes dispositivos pasivos como pueden ser los combinadores, circuladores, conectores, etc. Dichos productos son generados por dos o más señales no deseadas a las frecuencias f1, f2, ... La relación entre fIM y f1, f2, puede expresarse de forma muy general: fIM = |m1 f1+m2 f2+…| con mi= 0, ± 1, ± 2, … El orden del producto de intermodulación viene dado por n = m1+ m2+…. Los productos 2 f1 – f2 y 2 f2 f1 son los que más interesan a los diseñadores puesto que a menudo vienen especificados en las normas. No obstante, los productos f1 f2 – f3 son de mayor magnitud y más numerosos si hay más de dos señales interferentes. Dos o más señales fuertes distintas de las del canal pueden generar resultados de intermodulación en un receptor. Si una de estas frecuencias coincide con la de funcionamiento del receptor, el resultado es una interferencia. El proceso de intermodulación tiene lugar en el amplificador de RF de un receptor o en el mezclador. La mayoría de los receptores que se utilizan actualmente en las instalaciones son extremadamente selectivos, sin embargo cuando existen señales de alto nivel en frecuencias separadas en varios Mhz de la fundamental de un receptor: éstas pueden atravesar las protecciones de entrada y en presencia de otras señales, mezclarse con ellas y como resultado de la intermodulación producirse una frecuencia que coincida con la del canal y superponerse a la frecuencia de trabajo. Para evitar estas interferencias es aconsejable intercalar un filtro de cavidad o a cristal entre el receptor y su antena. Los problemas de cohabitación pueden aparecer en las estaciones que utilizan varias frecuencias, con una distribución horizontal de las antenas. Aunque una distribución vertical podría ser aconsejable, esta dificulta el mantenimiento y, además, introduce deformaciones en el diagrama de radiación. Quizás no es posible desplazar las antenas más allá de una superficie de instalación limitada, o existe una pérdida en los coaxiales demasiado importante. Cuando las antenas están próximas, una perturbación mutua aparece entre las antenas, así como problemas de modulación cruzada (frecuencia modulada por otra frecuencia perturbador), y de ínter-modulación (generación de una frecuencia como resultante de dos otras). Una solución consiste en aumentar el desacoplamiento entre las antenas emisión, así como entre las antenas emisión y recepción. Para aumentar el desacoplamiento: Es posible utilizar una instalación vertical de antenas, que reduce las perturbaciones de antenas y la saturación del número de frecuencias). Evitar frecuencias que corresponden a productos de ínter modulación. Se pueden emplear equipos accesorios para facilitar la cohabitación. De una manera general, los equipos accesorios permiten rechazar las señales interferentes indeseadas (ruido, espurios o armónicos). De esta forma empleamos filtros, duplexores, cavidades, circuladores o aisladores. FILTROS. Los filtros se utilizan para separar las bandas de frecuencia (HF, VHF ó UHF) entre ellas (en el caso por ejemplo de una cohabitación entre instalaciones civil y militar), o bien separar varias frecuencias en una banda particular. Existen diferentes tipos de filtros: Filtro paso-bajo: rechaza todas las frecuencias por encima de una frecuencia especificada llamada « frecuencia de corte ». Se utiliza para atenuar los armónicos o ciertos espurios. Sus especificaciones indican: La potencia máxima de entrada. La pérdida de inserción. La frecuencia de corte. La atenuación en la banda rechazada. Filtro paso-alto: rechaza todas las frecuencias por debajo de una frecuencia especificada llamada también « frecuencia de corte ». Sus especificaciones son similares a las del filtro paso-bajo. Filtro paso-banda: Diseñado para presentar una atenuación mínima en una frecuencia particular o un rango de frecuencias, y rechaza todas las demás. Puede ser más o menos selectivo. Sus especificaciones son: La potencia máxima de entrada. La pérdida de inserción. La frecuencia central. La selectividad. La atenuación fuera del filtro. Filtro “notch” o rechazador: diseñado para presentar una atenuación máxima en una frecuencia particular o un rango de frecuencias, y ser transparente para todas las demás. Como en el caso del filtro paso-banda, puede ser más o menos selectivo. Se utiliza para rechazar frecuencias interferentes determinadas. Filtro paso-banda / notch: efectúa las dos funciones precedentes en el mismo dispositivo. Presenta una atenuación máxima para una frecuencia, y una atenuación mínima para un rango de frecuencias. La frecuencia rechazada puede encontrarse por debajo o por encima del pasa-banda. Sus especificaciones son: La potencia máxima de entrada. La pérdida de inserción para las frecuencias del filtro pasa-banda. El rango de frecuencias del filtro pasa-banda. La atenuación de la frecuencia rechazada. La separación « duplex » (distancia mínima entre la frecuencia rechazada y la frecuencia central del filtro pasa-banda). DUPLEXOR. Duplexor: filtro específico, de tipo doble notch, utilizado para rechazar dos frecuencias en el mismo dispositivo. Tipos: Dos frecuencias de transmisión. Una frecuencia de transmisión y una de recepción, en caso de utilización de una antena Tx/Rx. Dos frecuencias de recepción. Su principal característica es la supresión del ruido de transmisión a la frecuencia de recepción, lo que corresponde también al aislamiento de la frecuencia de recepción a la frecuencia de transmisión. Las otras especificaciones son El rango de frecuencia. La separación « duplex » mínimo (entre las dos frecuencias). La pérdida de inserción. CAVIDADES. Cavidad : su función es igual a la de un filtro, pero su selectividad es mucho más importante. Para un filtro convencional, la selectividad es de algunos MHz; para una cavidad, es de solamente algunos 100 kHz. El parámetro Q, que se llama factor de calidad, define la selectividad de la cavidad: corresponde a la relación entre la frecuencia central y el ancho de banda a –3dB: Q = F0 / ΔF3dB La selectividad aumenta como el factor Q. La segunda característica importante de una cavidad es su nivel de ROE a la frecuencia operacional. Teóricamente, el ROE vale 1 a esta frecuencia, y es infinito para todas las demás. En realidad, se habla de la zona operacional de la cavidad como el ancho de banda de frecuencia en que el ROE < -20 dB. En realidad, el ROE es una relación de onda y no se puede medir en dB. Así, esta zona corresponde al ancho de banda donde el ρ < -20dB (con ρ = Vdir/Vrfl). En este caso, el ROE no es peligroso para los equipos conectados: ρ = -20dB � ρ = 0,1 Vrfl = Vdir / 10 Prfl = Pdir / 100 Las otras especificaciones son: El rango de frecuencias. La pérdida de inserción. La potencia de entrada. CIRCULADOR. Circulador: Es un dispositivo pasivo no-recíproco con tres puertos. La energía introducida en un puerto va transferida hacia el puerto adyacente, quedando aislado el tercer puerto. Por ejemplo, la energía entrante en el puerto 1 sale por el puerto 2 ; la energía entrante por el puerto 2 sale por el puerto 3, y así en un orden cíclico. Esta propiedad fundamental de no-reciprocidad simplifica la arquitectura y mejora la estabilidad, la eficacia y la precisión de los Sistemas de Radiocomunicación. Se define un parámetro especifico de aislamiento: es la relación (en dB) entre la potencia que entra por un puerto con la potencia que sale por el puerto adyacente, del lado opuesto a la circulación normal. Las otras especificaciones son: El rango de frecuencia. La pérdida de inserción. La potencia máxima de entrada. AISLADOR. Aislador: Es también un dispositivo pasivo no-reciproco pero solamente con 2 puertos (el tercer conectado internamente a una carga) que permite a la energía RF de cruzar lo en un sentido y de ser totalmente absorbida en el sentido inverso. Tiene las mismas propiedades fundamentales de no-reciprocidad : mejora de la sencillez, estabilidad, eficacia y precisión de los sistemas de radiocomunicación. Para un aislador, el parámetro de aislamiento es : la relación (en dB) de la potencia que entra con la potencia que sale cuando se envía una señal al lado opuesto a la circulación normal. Las restantes especificaciones son las mismas que las del circulador: El rango de frecuencia. La pérdida de inserción. La potencia máxima de entrada. Suponemos un centro de transmisión con dos frecuencias F1 (121,9 MHz) y F2 (121,4 MHz). Dos emisores 50W E1 y E2, respectivamente asociados a estas dos frecuencias, radian respectivamente a través de dos antenas A1 y A2. Suponemos por otra parte un centro de recepción con la frecuencia F3 (120,9 MHz) y un receptor R3 asociado a esta frecuencia. Una antena A3 permite la recepción de la frecuencia precedente. El emisor E1 radia su potencia P1 a través la antena A1. La potencia radiada P1 de E1 se recibe de manera atenuada sobre la antena A2. De la misma manera, el emisor E2 radia su potencia P2 a través la antena A2. La potencia radiada P2 de E2 se recibe de manera atenuada sobre la antena A1. Así tenemos: Sobre la antena A1, la potencia transmitida P1 + la potencia recibida P2‟. Sobre la antena A2, la potencia transmitida P2 + la potencia recibida P1‟. Las potencias P1‟ y P2‟ habrán sufrido atenuación en el espacio libre. Así, utilizando la ecuación de las telecomms: AdB = 20log[λ/(4πD)] = -32,44 - 20log[f(MHz)] - 20log[d(Km)] Sobre la antena A1, la frecuencia F1 puede generar productos de intermodulación de 3er orden con la frecuencia F2, como por ejemplo 2F1 – F2 o 2F2 – F1. Esto se produce porque el modulo amplificador VHF del emisor E1 tiene no-linealidades. El número de productos de intermodulación de este tipo (2F1 – F2) vale n·(n-1) donde n es igual al número de frecuencias utilizadas. En este ejemplo, n = 2, es decir un número de productos de intermodulación de 2. Es posible que uno de los dos productos corresponda a una de las frecuencias operacionales utilizada por el receptor. Los productos de intermodulación generados no se emiten a las potencias P1 y P2, sino que los emisores los atenúan por no estar en la frecuencia central (F1 ó F2). Esta atenuación es del orden de: AIMdB = -46,5 - 30log[ F(MHz)] Potencia P1 radiada por la antena A1: Potencia de salida de E1: 50W +47 dBm Pérdidas en los coaxiales hasta A1: -2,0 dB Ganancia de la antena A1: +2,0 dB Total: +47,0 dBm Potencia P1‟ recibida sobre la antena A2: Potencia P1 radiada por la antena A1: +47,0 dBm Atenuación de potencia sobre la antena A2: Dada F1, corresponde una λ = 2,46 m Distancia entre transmisores, d = 40m AdB = 20log[λ/(4πd)] = 20log[2.46/(4π40)] -46.2 dB Total: +0,8 dBm Potencia P1‟‟ recibida a la entrada del emisor E2: Potencia P1‟ recibida sobre la antena A2: +0,8 dBm Pérdidas a través de los coaxiales desde A2: -2,0 dB Total: -1,2 dBm Nivel del producto de íntermodulación 2F2 – F1 saliendo de A2: Potencia P1‟‟ recibida a la entrada del emisor E2: -1,2 dBm Nivel de íntermodulación (DF=0,5 MHz): -37,5 dB Pérdidas a través de los coaxiales hacia A2: -2,0 dB Ganancia de antena: +2,0 dBi Total: -38,7 dBm Nivel del producto de íntermodulación 2F2 – F1 radiado sobre A3: Nivel del producto 2F1 – F2 saliendo de A2: -38,7 dBm Atenuación del producto de intermodulación sobre la antena recepción A3: Para 2F2-F1 λ = 2,49 m y d = 250m AdB = 20log[λ/(4πd)] = 20log[2.49/(4π·250)] -57,6 dB Total: -96,3 dBm Nivel del producto de intermodulación 2F1 – F2 a la entrada del R3: Nivel del producto 2F2 – F1 radiado sobre A3: -96,3 dBm Pérdidas a través de los coaxiales desde A3: -3 dB Total: -99,3 dBm La sensibilidad del receptor es -101 dBm Se suele exigir un nivel de intermodulación al menos 6 dB inferior (-107 dBm). En este caso, sería necesario un mecanismo de atenuación adicional. Las comunicaciones tierra/tierra facilitan el intercambio de información relativa al control de tráfico aéreo entre distintas dependencias aeronáuticas. Se realizan, principalmente, a través del servicio fijo de telecomunicaciones aeronáuticas. Se emplean líneas telefónicas, telegráficas y de datos, así como radioenlaces por microondas y la Red de Datos de Navegación Aérea (REDAN). La clasificación de las comunicaciones tierra/tierra es muy compleja dada la elevada cantidad de elementos involucrados (medios técnicos, dependencias, servicios, organismos, etc.). Formas de comunicaciones Tierra/Tierra: Comunicaciones T/T Orales. Comunicaciones T/T de Datos. El servicio fijo aeronáutico comprende los sistemas y aplicaciones utilizados para las comunicaciones tierra-tierra (es decir, entre puntos fijos o de punto a multipunto) siguientes: Circuitos y redes orales directas ATS. Circuitos meteorológicos operacionales, redes y sistemas de radiodifusión. La red de telecomunicaciones fijas aeronáuticas (AFTN). La red OACI común de intercambio de datos (CIDIN). Los servicios de tratamiento de mensajes de los servicios de tránsito aéreo (ATSMHS). Las comunicaciones entre centros (ICC). La AFTN proporciona un servicio de almacenamiento y retransmisión de mensajes para la transmisión de mensajes de texto en formato ITA-2 o IA-5, utilizando un procedimiento a base de caracteres. La CIDIN proporciona un servicio de transporte común para la transmisión de mensajes de aplicación binarios o de texto. Apoyo de aplicaciones AFTN y OPMET. La aplicación del servicio de tratamiento de mensajes ATS (servicios de tránsito aéreo) (ATSMHS) permite el intercambio de mensajes ATS. Utiliza el servicio de comunicaciones interred (ICS) de la red de telecomunicaciones aeronáuticas (ATN). Las aplicaciones de comunicaciones entre centros (ICC) permiten el intercambio de información entre entidades de tránsito aéreo. Utiliza el servicio de comunicaciones interred (ICS) de la red de telecomunicaciones aeronáuticas (ATN), apoyo de la notificación, la coordinación, la transferencia de control, la planificación de vuelo, la gestión del espacio aéreo y la gestión de la afluencia del tránsito aéreo. COMMS T/T ORALES. Las comunicaciones orales T/T se definen como el soporte terrestre utilizado para establecer comunicación directa en banda vocal entre personal relacionado con los servicios de navegación aérea, tanto usuarios como proveedores. Las principales funciones que prestan son: Enlace entre centros de comunicaciones T/A y dependencias aeronáuticas. Para establecer las comunicaciones controlador-piloto. Para radiodifundir los mensajes del servicio VOLMET. Enlace entre distintas dependencias aeronáuticas para tareas de coordinación entre controladores, gestión, etc. Los medios técnicos encargados de dar este soporte suelen ser: Circuitos telefónicos dedicados alquilados a Telefónica. Canales en alquiler de la red de microondas del Ejército del Aire. Radioenlaces. Cables de pares telefónicos, cuando la distancia a cubrir no es muy grande. Fibra Óptica. RADIOENLACES. Se denominan radioenlaces a los sistemas de transmisión de información que utilizan las ondas electromagnéticas, normalmente de frecuencias elevadas, a través de un medio no guiado como es el espacio para efectuar enlaces punto a punto. Las frecuencias centimétricas y milimétricas se han utilizado tradicionalmente en enlaces punto a punto de alta capacidad. Se emplean las comunicaciones vía radio cuando los emplazamientos que se desea conectar están distantes entre sí o no se dispone del tendido preciso. Los vanos pueden ser independientes o formar parte de redes en anillo. Se instalan radioenlaces para comunicar las estaciones de radar, centros de emisores y receptores, y radioayudas con las torres de control de los aeropuertos y los Centros de Control (ACCs). Frente a soluciones basadas en fibra óptica, la gran ventaja de estos sistemas es su rapidez de instalación, ya que se elimina la necesidad de obra civil. La capacidad de servicios instalados dependerá del tráfico actual y el previsto en el futuro. COMMS T/T DATOS. La comunicación de datos, en su forma más simple, tiene lugar entre dos dispositivos que están directamente conectados (punto a punto) por algún medio de transmisión. Ejemplos de esta situación en el Sistema de Navegación Aérea son los siguientes: Un centro de comunicaciones está directamente enlazado con el centro de control al que da servicio. Una radioayuda de un aeropuerto está conectada a la sala de equipos de la torre para su supervisión y mantenimiento. Dos dependencias ATS colaterales disponen de, al menos, una línea telefónica dedicada punto a punto para realizar tareas de coordinación entre controladores. A nivel general, previo al inicio de un vuelo es necesario presentar un Plan de Vuelo. Este Plan de Vuelo se entrega a los aeropuertos de origen y destino, así como a todos los centros ATC intermedios a lo largo de la ruta prevista. Para vuelos programados, esta entrega se realiza generalmente mediante intercambio de comunicaciones de datos entre Operadores de Aeronaves y Proveedores de Servicios de Tránsito Aéreo. En Europa, una Unidad Central de Gestión de Flujos (CFMU) recoge todos los planes de vuelo hasta con seis meses de antelación. Hace predicciones de flujos de tráfico hasta 48 horas antes del despegue para asignar un slot de salida. Esto requiere comunicación de datos entre CFMU y Operadores. Asimismo, los planes de vuelo corregidos y las predicciones de tráfico deben ser enviadas a los Proveedores de Servicio Esto también requiere comunicaciones de datos entre CFMU y proveedores ATS. Actualmente la AFTN es la única red de COM T/T datos a escala mundial. La red fija de telecomunicaciones aeronáuticas (AFTN) es un sistema de transmisión de información aeronáutica a escala mundial para el intercambio de mensajes o de datos numéricos. Los elementos que intervienen en este tipo de comunicación deben disponer de una dirección AFTN reconocida. La adjudicación de la dirección a un usuario concreto de la red obedece a una combinación de criterios geográficos y operativos. Generalmente, esta dirección constará de ocho letras mayúsculas. Sus aplicaciones son las siguientes: Servicio de tránsito aéreo. Distribución de datos meteorológicos. Servicio de Información Aeronáutica. Es un sistema de almacenamiento y envío de mensajes. Los mensajes que se transmiten pueden clasificarse en diferentes tipos, de acuerdo a su prioridad. Actualmente, existen cinco prioridades, dependiendo de la naturaleza del mensaje. La construcción de los mensajes AFTN responde a un formato estandarizado: primero, se indicará la prioridad del mensaje y, luego, el grupo fecha / hora de creación del mismo. El sistema está compuesto de nodos y líneas de baja velocidad entre ellos (varios cientos de bits por segundo, frente a las líneas en megabits actuales). Dentro de la red mundial AFTN, la OACI ha designado España como nodo de conexión para el enlace con el nodo del Caribe y Sudamérica. OACI tiene como objetivo tener al menos un nodo por país. Emplea teletipos, por lo que sólo permite enviar un número limitado de caracteres (p.e. sólo letras mayúsculas, sin acentos, etc.). Además, la calidad de la línea no permite un mecanismo de detección de errores. Debido a las limitaciones de los primeros equipos terminales de datos (teletipos, ya en desuso), en un principio, la comunicación se realizaba por líneas telegráficas. Estas han sido sustituidas en la actualidad por redes de comunicaciones de datos, como REDAN, ya que actualmente los equipos terminales suelen ser ordenadores personales, que no imponen restricciones de velocidad. Cada mensaje AFTN se envía de un nodo al siguiente, que mira la dirección AFTN de destino y decide por que enlace enviarlo, hasta llegar así objetivo. Servicios de Tránsito Aéreo(ATS). Planes de vuelo. Gestión del Tráfico Aéreo. Servicios de Información Aeronáutica(AIS). Distribución NOTAM. Recuperación NOTAM. DatosMeteorológicosOperacionales(OPMET) Pronósticos. Informes. Muchas otrasaplicaciones no las soporta AFTN: (co-ordinación, cartas meteorológicas, …). CATEGORÍAS DE MENSAJES AFTN. ORDEN DE PRIORIDAD. El orden de prioridad para la transmisión de mensajes en la red de telecomunicaciones fijas aeronáuticas será el siguiente: Los mensajes que tengan el mismo indicador de prioridad deberían transmitirse según el orden en que se reciban para su transmisión. Encabezamiento del mensaje: Dirección. Procedencia. Prioridad. Cuerpodel mensaje: No transparente. Max. 1800 caracteres. CIDIN: Common ICAO Data Interchange Protocol. Red OACI común de intercambio de datos. Los objetivos principales de la CIDIN son: Mejorar la AFTN. Mayor capacidad de conmutación. Líneas más veloces. Prestar apoyo a transmisiones de mensajes largos y a aplicaciones más exigentes, tales como la información meteorológica relativa a las operaciones (OPMET), entre dos o más sistemas de tierra. Hace uso de protocolos basados en la Recomendación X25 del Comité Consultivo Internacional Telegráfico y Telefónico (CCITT). Existe un plan de OACI para implantar un nodo CIDIN en cada país. CIDIN es un protocolo de comunicaciones que transporta la información en forma de pequeños paquetes (empaquetamiento de datos). Un mensaje AFTN se descompone en una serie de «paquetes CIDIN», que son transportados y reensamblados en el destino, recomponiendo el mensaje AFTN. Actualmente, la red CIDIN sólo se utiliza para el intercambio de mensajes AFTN y de gestión, pero se integrarán en ella nuevas aplicaciones, como OPMET y mensajes ATN. OBJETIVOS CIDIN. Proporcionar una red de reserva de mayores prestaciones que la AFTN. Proporcionar una red multipropósito para aplicaciones aeronáuticas (no sólo planes de vuelo). La red CIDIN es una red de comunicaciones creada para mejorar la red de comunicaciones aeronáuticas. Permite aumentar el tipo de mensajes intercambiados entre centros. AFTN únicamente soporta el intercambio de mensajes con formato. Mejora la calidad de las comunicaciones, permite aumentar la velocidad, seguridad, capacidad de datos, robustez, fiabilidad y flexibilidad, ya que es capaz de soportar mensajes AFTN y de otras aplicaciones. Permite el uso de las redes de datos de los distintos países para la interconexión entre los centros CIDIN. No obstante, no ha sido adoptada por los países a escala local y se utiliza como interconexión entre las diferentes redes nacionales. El Sistema de Mensajería Electrónica Aeronáutica (AMHS), basado en el estándar X.400, ha sido adaptado al entorno aeronáutico para sustituir a la aplicación AFTN (Red Fija de Telecomunicaciones Aeronáuticas). Las ventajas que proporciona el sistema AMHS sobre AFTN son: Agilidad operacional. Total fiabilidad en la entrega del mensaje. Alta disponibilidad del servicio. Interoperabilidad con otros sistemas de mensajería. Se utilizará para el intercambio de mensajes ATS entre usuarios por la ATN. El sistema AMHS se encarga de dar soporte de transporte a los mensajes aeronáuticos intercambiados entre las diferentes dependencias aeronáuticas a nivel mundial. OACI designó a España como nodo de conexión de la red mundial, responsable de establecer el enlace entre la región de vuelo europea (EUR) con las regiones de vuelo africana (AFI), sudamericana (SAM) y caribeña (CAR). Para realizar estas tareas Aena dispone de Centros Integrados de Retransmisión Automática de Mensajes (CRAMI) con las siguientes funcionalidades: Nodo de retransmisión automática para mensajes AFTN telegráficos (síncronos/asíncronos). Nodo de retransmisión automática de mensajes CIDIN (Red OACI común de intercambio de datos), con conversión de formato CIDIN a AFTN. Pasarela AFTN/AMHS, que permite el intercambio de mensajes entre AFTN y AMHS. IMPLANTACIÓN. La mayor parte de los enlaces telegráficos han sido reemplazados por otro tipo de mensajería, la AMHS o CIDIN o, en algunos casos, el medio de transmisión ha sido variado, pasando de ser una línea telegráfica a integrarse en la red de datos de Aena, REDAN, por medio de circuitos asíncronos e IP. La implantación de la mensajería AMHS en sustitución de la tradicional AFTN, conlleva el uso de una pasarela AFTN/AMHS que permita la coexistencia de los dos entornos de mensajería. La red de datos de navegación aérea (REDAN) es el sistema de comunicación nacional que provee todo tipo de comunicaciones para servicios tierra / tierra (entre centros de control, centro de control con torres, cabeceras radar, etc.). Surge debido a la necesidad de Aena de proporcionar una solución flexible, segura y eficiente a las nuevas necesidades de las comunicaciones de datos aeronáuticos. Para ello, se integran todos los recursos físicos para la comunicación de datos aeronáuticos y se utilizan estándares de formatos y protocolos. La red REDAN se proyectó atendiendo a los siguientes requisitos: El tiempo de la transmisión permitido para cada una de las aplicaciones aeronáuticas. El volumen de información transmitida. La alta disponibilidad del servicio. CARACTERÍSTICAS. Integración de comunicaciones. Red de empaquetamiento de datos. Interconexión con redes nacionales e internacionales. Alto grado de disponibilidad y seguridad. Diseño modular para una sencilla implementación. Acceso a redes públicas. Centro de gestión centralizado de todo el equipamiento existente a escala nacional. Para garantizar la funcionalidad de los distintos sistemas de comunicaciones de datos, se hace uso de redes públicas (RTC, RDSI) como sistema de reserva o “backup” a la REDAN. COMPOSICIÓN. REDAN está compuesta por: Una red central de diez nodos conmutadores de red o puntos centrales de afluencia de información en: Madrid ACC, Sevilla ACC, Barcelona ACC, Canarias ACC, aeropuertos de Santiago, Vitoria, Málaga, Palma de Mallorca, Valencia y Tenerife Sur. Cada uno ellos están interconectados por lo menos con otros dos nodos, que soportan funciones de encaminamiento y acceso de usuarios. Un área periférica compuesta por elementos locales redundantes (aeropuertos y bases aéreas) a los cuales se conectan los usuarios. Están dotados de respaldo a través de la red de telefónica básica (RTB) y la red digital de servicios integrados (RDSI). •Además, la red ofrece la posibilidad de conexión a la red IBERPAC (red pública de paquetes X.25), RECOA (red ofimática de Aena) y las redes de navegación aérea de Portugal (RINAL) y de Francia (RENAR). USUARIOS. SACTA: A través de REDAN-IP se encuentran conectadas los sistemas SACTA de las torres de control con los sistemas SACTA de los ACCs correspondientes. Sistema ICARONOF: A través de REDAN se encuentran conectados en la actualidad la oficina NOF y los Sistemas Icaros de los diferentes aeropuertos españoles. AFTN: A través de REDAN se conecta el sistema CRAMI con algunos de sus colaterales AFTN, también existen conexiones del sistema ICARO con el sistema CRAMI utilizando protocolo IP. Mensajería AMHS: REDAN soporta todos los servicios AMHS (conexión de usuarios a servidores y de servidores entre sí). Datos radar: REDAN transporta la información radar en formato ASTERIX desde las cabeceras radar a las dependencias que hacen uso de esta información, que en algunos casos están ubicados en países colaterales. ETFMS: A través de REDAN se suministran comunicaciones entre el sistema SACTA de los ACCsy el sistema de “flow” de Bruselas. Comunicaciones de Datos Tierra/Tierra. Sistemas de Mensajería: AFTN (Aeronautical Fixed Telecommunication Network). CIDIN (Common ICAO Data Interchange Network). Redes de Área Extensa (WAN). Packet Switched Data Networks(PSDN: X.25): Públicas y Privadas (REDAN). Líneas alquiladas. Redes de Área Local (LAN). Ethernet, FDDI. Comunicaciones de Datos Tierra/Aire. Servicio AIRCOM proporcionado por ARINC y SITA. Formato Principal: ACARS (Aircraft Communications And Reporting System). AMSS (Aeronautical Mobile Satellite Service). VDL (VHF Data Link). Modo S. Escenario heterogéneo y de difícil evolución. Equipos y aplicaciones dedicados a redes específicas o enlaces de datos T/A. Elevados costes de instalación y mantenimiento No garantiza fiabilidad global Prestaciones no optimas Alta dependencia de operadores privados. Necesidades de Control (ATC). Problemas de ATC: Incremento constante del tráfico. Las soluciones tradicionales ya no valen (sectores más pequeños). Canales de comunicación voz en VHF saturados en algunas zonas. El desarrollo de un data-link ofrecería soluciones: Menor utilización de los canales voz. Desarrollo de asistencia automática para la gestión del tráfico aéreo. Necesidades de las Compañías Aéreas. Ahorro de costes: Desarrollo de sistemas automatizados para optimizar rutas, logística, mantenimiento Rentabilidad: Ingresos de pasajeros haciendo llamadas en vuelo. Especificar un sistema global para proporcionar un servicio único para todas las comms digitales: Comunicaciones fiables y globales. Servicio común para todos los usuarios(ATS, líneas aéreas, pasajeros). Interfaz para las aplicaciones independiente de la naturaleza del enlace A/T. Servicio basado en las redes y data-links existentes y en los emergentes. Estandarización basada en los principios Open Systems Interconnection / International Standardisation Organisation(OSI/ISO). •La Aeronautical Telecommunication Network (ATN) es la solución propuesta por OACI. La ATN se definió como una “Internet OSI/ISO”. Es una arquitectura de protocolos de comunicaciones, basada en los estándares internacionales OSI/ISO, para la interconexión de redes de tierra y aire/tierra con el objetivo de proporcionar un servicio digital de comunicaciones único y global para todos los usuarios civiles. El modelo de referencia OSI/ISO tiene una arquitectura de red jerárquica, estructurada en capas. Están definidos los servicios y funciones de cada capa. El estándar X.400 MHS (Message Handling System) define el manejo de mensajes OSI/ISO. Aplicación: Funciones de comunicación específicas de las aplicaciones. Presentación: Representación de datos. Sesión: Sincronización de instalaciones. Transporte: Integridad de las transmisiones de origen a destino. Red: Ruta y envío de datos. Enlace de datos: Transferencia de información entre nodos adyacentes. Física: Transmisión binaria en un medio físico. Los sistemas de comunicaciones de voz (SCV): Gestionan y soportan las comunicaciones de voz entre pilotos y controladores del Centro de Control. Gestionan y soportan las comunicaciones de voz entre controladores de la misma dependencia y de otras dependencias relacionadas con el Centro de Control. Facilitan la configuración, sectorización, supervisión y elaboración de estadísticas. Los subsistemas que componen un Sistema de Comunicaciones de Voz son los siguientes: Subsistema de Comunicaciones Radio o Tierra / Aire (T/A). Subsistema de Comunicaciones de Telefonía o Tierra / Tierra (T/T). Subsistema de Gestión. Los módulos principales de un Sistema de Comunicaciones Voz son: Interfaces exteriores. Telefonía: Líneas de acceso directo e indirecto y líneas calientes y Centralitas. Radio: VHF y UHF. Subsistema de conmutación. Interfaces con las Posiciones de Operador. Interfaz Hombre/Máquina (pantalla táctil, paneles electromecánicos, etc.). Altavoz radio y altavoz línea caliente. Paneles de conectores. Microteléfonos. Pedal de PTT. Subsistema de gestión, supervisión y mantenimiento. Los SCV dan soporte a las comunicaciones de voz por radio, reales o simuladas, entre posiciones de control y aeronaves (servicio radio). Para ello, realizan el control y conmutación de las comunicaciones internas del sistema, así como el control de las interfaces de canal radio. Esta funcionalidad reside en el Subsistema de Comunicaciones Radio. El Subsistema de Comunicaciones Radio proporciona los siguientes servicios de forma simultánea: Gestión de transmisiones y recepciones de radio, externas. Gestión de facilidades de radio. Como soporte a los servicios anteriores, los SCV disponen de funcionalidad interna para: Realizar la gestión de múltiples frecuencias y pseudo-frecuencias en transmisión y en recepción. Comprobar la realización de transmisiones por los equipos radio remotos. Seleccionar la mejor señal recibida por varios interfaces de canal radio (BSS). Los SCV dan soporte a las comunicaciones de voz telefónicas entre dos posiciones internas o una posición interna y otra externa (de otra dependencia) en tierra. Para ello, realizan el control y conmutación de las comunicaciones telefónicas del sistema, así como el control de las interfaces con las líneas telefónicas externas al SCV. Esta funcionalidad reside en el Subsistema de Comunicaciones de Telefonía. El Subsistema de Comunicaciones de Telefonía proporciona los siguientes servicios de forma simultánea: Servicio de Acceso Instantáneo (Línea Caliente): Gestión de transmisiones y recepciones de acceso instantáneo internas y externas. Servicio de Acceso Directo: Gestión de comunicaciones telefónicas de acceso directo (sin marcación) y gestión de facilidades telefónicas. Servicio de Acceso Indirecto: Gestión de comunicaciones telefónicas de acceso indirecto (con marcación) y gestión de facilidades telefónicas. Las funciones de apoyo a la explotación del SCV residen en el Subsistema de Gestión. El acceso a la información de explotación se realiza a través de terminales específicos de gestión, protegidos mediante claves de acceso individuales, cada una de las cuales tiene autorizado el nivel de acceso correspondiente. La asignación de claves y niveles es configurable por el administrador del sistema. El Subsistema de Gestión del SCV da soporte a las siguientes funciones: Función de Interfaz con la red SACTA. Función de configuración. Función de sectorización. Función de reconfiguración dinámica de puestos de apoyo. Función de supervisión. Función de análisis estadístico. Función de cambio principal/reserva de SCV. El SCV debe gestionar las comunicaciones teniendo en cuenta una serie de prioridades en la coincidencia simultánea de llamadas. Éstas se establecen para garantizar que cualquier falsa maniobra que por descuido pueda realizar el controlador no afecte al sistema. Con ello se evita que un mensaje destinado a un determinado colateral, de telefonía o radio, pueda canalizarse por vía distinta a la pretendida y sea recibido por otro, con la consiguiente confusión de este último. Dichas prioridades implican una serie de acciones a realizar por el sistema, las cuales se detallan a continuación: El subsistema telefónico de líneas calientes tendrá prioridad sobre la transmisión radio y las comunicaciones telefónicas con aceptación de llamada. Durante la transmisión por línea caliente el circuito de transmisión radio quedará inactivo. La recepción de mensajes por línea caliente, a través del altavoz de la posición, podrá tener lugar en cualquier momento sin interrumpir para ello cualquier otra comunicación que se estuviera desarrollando. La transmisión radio tendrá prioridad sobre las líneas telefónicas con aceptación de llamada. El accionamiento del pulsador PTT de la radio, durante cualquier comunicación telefónica con aceptación de llamada, desconectará automáticamente de este sistema los auriculares (si éste estuviera conectado a ellos) y micrófono de la posición, conmutándolo al subsistema radio, hasta que termine la transmisión radio. La recepción radio, bien en altavoz, bien en auricular, nunca quedará interrumpida durante el desarrollo de las comunicaciones telefónicas o la transmisión o recepción por línea caliente. La escucha de los canales radio se mantendrá en el dispositivo seleccionado, auriculares o altavoz aunque se esté empleando la línea caliente. Cuando se utilice alguna línea telefónica con aceptación de llamada, el micrófono y el auricular del microteléfono estarán asociados al subsistema telefónico. Los canales radio que estuvieran seleccionados en éste auricular pasarán automáticamente al altavoz radio, hasta que termine la comunicación telefónica. El Subsistema de Conmutación permite establecer las comunicaciones entre todos los operadores de control y los interfaces exteriores (líneas telefonía y canales radio). Para ello, utiliza una técnica de multiplexación por división en el tiempo (TDM). Previo a ello, es necesario digitalizar las señales, en ambos interfaces (exteriores y de operadores), mediante PCM (Modulación por Impulsos Codificados). MODULACIÓN POR IMPULSOS CODIFICADOS. La Modulación por Impulsos Codificados MIC o PCM, se basa en la teoría de muestreo de Nyquist o Shannon: Si se muestrea un canal de audio a intervalos regulares, a una velocidad al menos dos veces superior a la máxima frecuencia presente en dicho canal, las muestras obtenidas contienen información suficiente para permitir la reconstrucción de la señal original. Por lo tanto, la reconstrucción de una señal que ha sido muestreada a 8 KHz, es suficiente para volver a presentar, en forma analógica, la información contenida en un canal telefónico de 4KHz. En el PCM, hay tres etapas principales: muestreo, cuantificación y codificación. El muestreo se realiza a intervalos regulares de al menos dos veces la frecuencia más alta del espectro utilizado (al menos dos muestras en ese periodo). Luego se transmiten las muestras a un filtro paso-bajo que tenga una curva de respuesta plana por lo menos hasta fs y una frecuencia de corte menor ó igual a fm-fs. Una vez efectuado el muestreo, la señal obtenida se somete a una segunda etapa: la cuantificación, cuyo objetivo es asignar un valora cada señal PAM (amplitud). Por último, la señal se codifica para mejorar la relación S/N, es decir, su calidad. (Ley logarítmica de codificación). A lo largo de la historia de la Navegación Aérea, se han utilizado diversas definiciones del término “vigilancia”, las cuales han ido evolucionando en complejidad y contenido a medida que el propio sistema de Navegación Aérea ha ido madurando y creciendo a lo largo de los años. Recopilando las mismas, existen básicamente tres definiciones que podemos emplear para explicar que significa el término “VIGILANCIA” o “SURVEILLANCE” en el ámbito del tráfico aéreo. Vigilancia es un medio de adquirir la información de posición de la aeronave para que el controlador pueda mantener la separación mínima. Ésta definición corresponde a una época en la cual el sistema de gestión de tráfico aéreo desarrollaba unas funcionalidades básicas; refleja únicamente algunos de los propósitos y los usuarios de la vigilancia actual, que no obstante siguen siendo válidos. Desde una perspectiva ATC (Air Traffic Control) el controlador necesita disponer de una imagen precisa y fiable de la ubicación de las aeronaves a fin de poder proporcionar, con seguridad y confianza separaciones a las aeronaves, en muchos casos próximas o iguales a las mínimas separaciones operacionales permitidas entre las aeronaves. Vigilancia comprende todos los medios tecnológicos necesarios para proporcionar al sistema ATM información de posición y otros datos esenciales, incluyendo información meteorológica, de las situaciones de tráfico tanto en el aire como en tierra. El controlador no es el único usuario, en el sistema ATC de los datos y la información de vigilancia, existen otras partes o funciones del sistema que necesitan esta información. Se pueden utilizar un amplio abanico de posibilidades tecnológicas para proporcionar una imagen precisa de vigilancia al sistema ATM, incluyendo no solo al controlador sino a otras funciones del sistema ATM, muchas de las cuales sirven de apoyo para facilitar el trabajo del propio controlador, como la alerta de conflictos, STCA (Sort Term Conflcit Alert), etc. La funcionalidad de vigilancia establece una imagen de la situación del tráfico aéreo para ser suministrada a las funciones de procesamiento de datos. La creciente sofisticación del propio sistema y su futura evolución hace que la función de vigilancia pasa a ser una mera herramienta o entrada para otras funciones del sistema. Se incluyen en estas funciones de procesamiento de información de vigilancia todas aquellas funcionalidades del sistema ATM, que actúan como medio soporte al controlador, como la STCA, MTCD, MSAW, TP, DMAN, etc.. La información de vigilancia no llega directamente al controlador sino que es sometida a un complejo procesamiento y tratamiento a fin de constituir la mejor fuente de información posible para el controlador. Una de las piezas clave de este procesamiento lo constituye el tracking, consiste en generar e incluso predecir la trayectoria de una aeronave a partir de menores bloques de información como con los plots o blancos derivados de una multiplicidad de sensores y fuentes de vigilancia. Los servicios de vigilancia son requeridos para la provisión de separación entre aeronaves en el espacio aéreo controlado del área de la ECAC, para garantizar la gestión de un creciente volumen de tráfico de forma segura, ordenada y eficiente. Las necesidades de la vigilancia moderna tiene un doble hilo conductor: Beneficios percibidos frente a coste de los mismos. Los beneficios que una mejora de la función de vigilancia puede aportar se traducen en beneficios en términos de seguridad y en términos de capacidad. La Función de Vigilancia (como componente de la infraestructura CNS) proporciona los medios necesarios a la funcionalidad de vigilancia de los servicios de tráfico aéreo, permitiendo así visualizar la situación del tráfico. Bajo la denominación de Comunicaciones, Navegación y Vigilancia (CNS) se agrupan las infraestructuras técnicas sobre los cuales se sostiene el sistema de navegación aérea. Estos medios cumplen un papel de apoyo y de suministro de información básica para que el desarrollo cotidiano de la navegación aérea sea posible. Para que una aeronave se mueva segura de un punto a otro debe mantener un contacto continuo con el servicio de control en tierra a través de las “comunicaciones”, utilizará los sistemas de navegación para conocer su posición en todo momento y para dirigirse al lugar deseado, mientras que el servicio de control en tierra utilizará los sistemas de vigilancia para tener a las aeronaves localizadas y evitar conflictos entre ellas. Dentro de la cadena o función de vigilancia se realizan múltiples operaciones de procesamiento y tratamiento de datos al objeto de mejorar en todo momento la información disponible y con seguir una presentación final óptima para el controlador. Sensores radar PSR PROCESAMIENTO A NIVEL DEL SENSOR Procesamiento Producto SSR MSSR MODO-S Analógica Analógico/Digital Extractor Validación Seguimiento mono radar Server Data link Modo mixto Time base/Data rate Real-time processing TRANSMISIÓN Línea dedicada Red radar Protocolo Asterix SDPS. EN CTRO DE CONTROL Filtros bancos Plot/Blancos Pistas monoradar Mensajes Pistas multiradar PR, SR, PR/SSR Gestión altitud Seguimiento Seguimiento vertical mono radar STCA TCAS Funciones FDPS PRESENTACIÓN Plots sintéticos Pistas mono radar sintéticas Pistas multi radar sintéticas PROBLEMAS Jumps Time flagging Posición relativa Smoothing/Turn detection Básicamente la información de vigilancia se verá sometida a un procesamiento diferenciado a tres niveles diferentes: Procesamiento realizado a nivel del sensor en el propio emplazamiento radar, incluyendo el procesamiento de la señal y la extracción de los plots. Transmisión de la información de vigilancia desde la fuente o sensor hasta el centro de control o en su defecto el centro de procesamiento. Procesamiento en el centro de control o de tratamiento de datos. La función de vigilancia permite al controlador conocer la situación exacta de cada aeronave, y de este modo gestionar de forma adecuada el espacio aéreo, verificando separaciones entre aeronaves, y pudiendo asistir a los pilotos en la navegación. En la actualidad, la función vigilancia en áreas de alta densidad de tráfico está basada en radares secundarios (SSR), apoyados por primarios (PSR). En áreas oceánicas, se utilizan informes voz en HF/VHF. La función de vigilancia se divide en dos categorías: Dependiente: la posición de la aeronave se determina a bordo y se transmite. Independiente: la posición de la aeronave se determina desde tierra, con o sin colaboración de ésta. SISTEMA PSR CLASE DE VIGILANCIA Independiente SSR Voz HF/VHF Cooperativa Cooperativa INFORMACIÓN SUMINISTRADA 3D 2D 3D 1D APLICACIÓN Militar Militar/Civil Militar/Civil Civil En cobertura. Limitación línea vista, zonas ciegas, cono silencio, bajas altitudes. En solapes (garbling). En respuestas falsas (fruit). En coste. En impacto medioambiental (contaminación visual: tamaño, localización; contaminación electromagnética: radiación). Vigilancia Independiente No Co-operativa. No dependen en absoluto de la aeronave para su funcionamiento, es decir: no requieren que estas lleven equipamiento alguno, y en circunstancias normales, funcionan independientemente de las características de la aeronave. Radar de vigilancia primario (PSR) y Radar de movimiento en superficie (SMR). Vigilancia Independiente Co-operativa. Dependen de cierto equipamiento a bordo de la aeronave pero mantienen todas sus funcionalidades en tierra, en particular la realización de las medidas de la posición de la aeronave. Radar de vigilancia secundario (SSR ó MSSR). Vigilancia Dependiente. Dependen totalmente de los sistemas de navegación de la aeronave para la determinación de la posición de la misma. El piloto o los sistemas electrónicos de aviónica y procesamiento de datos de la aeronave informa al sistema de tierra de la posición de la aeronave. Este proceso puede ser manual (informes de posición enviados por el piloto vía comunicaciones voz), o totalmente automático sin intervención de la tripulación. La vigilancia dependiente automática es una técnica por la que una aeronave proporciona al centro de control, vía enlace de datos, información extraída de los sistemas de navegación y posicionamiento de a bordo. Los datos proporcionados serán entre otros: Identificación de la aeronave. Posición en 4D (λ; φ; Alty t). Intención de vuelo. La ADS engloba en su definición los conceptos siguientes: Vigilancia: facilita la posición de la aeronave en 4D. Dependiente: función de los sistemas de navegación y comunicaciones a bordo de las aeronaves. Automática: no necesita la intervención del piloto. La ADS se ha concebido como un facilitador de los nuevos conceptos ATM. DEFINICIÓN. RADAR es el acrónimo de RAdio Detection and Ranging. El RADAR está basado en la utilización de la energía electromagnética para la detección y la localización. Detección: Se realiza mediante reflexión activa o pasiva de la energía electromagnética. Se basa en la capacidad de respuesta del objeto material a detectar. Localización: Se realiza mediante la determinación de la distancia y la dirección en que está situado el objeto respecto al Radar. Se basa en las cualidades directivas y telemétricas de la energía electromagnética. El RADAR genera y propaga una señal electromagnética (interrogación), que puede ser una onda continua o una serie de impulsos. Esta señal al encontrarse un obstáculo produce una respuesta que puede ser una reflexión de la energía (PSR) o una serie de pulsos codificados (SSR). Al recibir esta respuesta la antena del RADAR, el sistema es capaz de calcular la posición y la distancia del obstáculo y presentarlos en una pantalla (PPI). Cualidad directiva: facultad de concentrar la propagación de la energía electromagnética en un ángulo sólido muy pequeño cuya orientación es conocida. Cualidad telemétrica: la propagación de la energía electromagnética responde a una ley dinámica espacio/tiempo conocida, permitiendo calcular la distancia en función del tiempo transcurrido entre el envío de la energía originado en el Radar y la recepción de la respuesta del blanco a localizar. La velocidad de propagación en el espacio real está relacionada con la del espacio libre mediante la siguiente expresión: El índice de refracción constante, en un medio homogéneo e isótropo conlleva: Trayectorias de propagación rectilíneas. Velocidad de propagación constante. La propagación en la atmósfera terrestre sólo se podrá estudiar cuando se conozca “n” que es función, entre otros parámetros, de P, T, δ, HR, que, a su vez, dependen de las condiciones meteorológicas, por lo que resulta imposible la ponderación matemática y, en consecuencia, no se podrán determinar las trayectorias ni su movimiento. La aplicación de hipótesis simplificadoras de carácter probabilístico se realiza considerando la Atmósfera Estándar, en la cual, son funciones de la altitud (único parámetro): Las variables de estado del aire. El índice de refracción (lineal decreciente). La velocidad de propagación (lineal creciente). El movimiento de propagación no es lineal ni uniforme. La distancia Radar en la Atmósfera Estándar sólo se puede determinar de forma aproximada si se conoce el tiempo de propagación y se calcula mediante la siguiente expresión: Con t: tiempo transcurrido entre la emisión de la energía y la recepción de la Respuesta. c: velocidad de propagación en el espacio libre ( ). El error que se comete es difícil de cuantificar, no obstante, sus límites se establecen estadísticamente y habrán de tenerse en cuenta al considerar la precisión. Esta aproximación no es válida ni con las simplificaciones de atmósfera estándar, pues se basa en considerar n=1 y, en la práctica, siempre resulta n >1. Las características directivas del Radar se basan en el empleo de antenas muy directivas, capaces de concentrar energía en un ángulo sólido muy pequeño. Los diagramas de radiación acimutal y cenital típicos de un Radar utilizado para el servicio de vigilancia de Navegación Aérea tienen, en coordenadas polares, la forma siguiente: Según el Blanco. Primario o PSR; blanco pasivo. Secundario o SSR; blanco activo. Según posición relativa del transmisor y el receptor. Monoestático: transmisor/receptor juntos. Multiestático: transmisor/receptor separados. Según el tipo de señal. Onda continua. No modulada: basado en el efecto Doppler, sólo puede determinar la velocidad pero no la posición de los blancos (radares de tráfico para control de velocidad). Modulada en frecuencia o fase: permite medir distancias de objetos fijos, pero no móviles (el radio altímetro es un radar de este tipo). Impulsos: concentra en breves impulsos la energía emitida y permite determinar la posición. Puede distinguir varios ecos en el mismo rumbo. Puede captar ecos a diferentes alturas. Puede discriminar ecos lateralmente. Los radares de vigilancia aérea, tanto PSR como SSR, son de impulsos. Ventajas de usar muy alta frecuencia: Propagación prácticamente en línea de vista. Alta resolución: a menor longitud de onda, los pulsos pueden ser más pequeños, facilitando la detección de obstáculos próximos (resolución). Facilidad para producir haces más estrechos, facilitando la localización. A mayor frecuencia, menor tamaño de antena necesario para obtener la misma ganancia. Problema: dificultad a la hora de emitir mucha energía en un pulso muy estrecho (perjudica al alcance). Solución: compresión de pulsos (modulación en frecuencia). Densidad de potencia radiada en la dirección del haz: Potencia reflejada por el obstáculo: Densidad de potencia del eco recibida por el Radar: Teoría de antenas: Alcance máximo: con Potencia mínima detectable por el radar. Eliminando de la ecuación del alcance: Si suponemos G = cte,, al disminuir la frecuencia: aumentará el y el alcance (R). Eliminando GTx de la ecuación del alcance: Si suponemos = cte,, al disminuir la frecuencia: disminuirá la G y el alcance (R). a) Señal mínima detectable. La capacidad de un radar para detectar una señal débil está limitada por el ruido que ocupa el mismo espectro de frecuencia que la señal a detectar. La detección se basa en el establecimiento de un umbral a la salida del receptor. Si la energía supera ese umbral se supone que existe señal. Objetivos: Alto nivel de detección (umbral bajo). Bajo nivel de falsas alarmas (umbral alto). b) Ruido térmico del receptor. Consideramos un receptor a una temperatura estándar, To = 290 K en un ancho de banda Bn (Hz). La potencia de ruido disponible es: No = kToBn con k = 1.38·10-23 (Julios/K) cte de Boltzman. Otros componentes del radar contribuirán al ruido (antena, mezclador, cables…). Se define la temperatura de ruido de un sistema Ts, en cuyo caso la potencia de ruido disponible será: No = kTsBn La cantidad k·Ts es la densidad de ruido espectral (W/Hz). c) Relación señal ruido. d) Figura de ruido. Algunos elementos activos como los amplificadores incrementan el nivel de señal, pero también añaden ruido. Para estos aparatos se utiliza la figura de ruido como figura de mérito. Para una red ideal que no añada ruido, La señal de salida será: Para hallar el alcance máximo, se hará: : En esta ecuación se asume que la temperatura de la antena será . e) Falsas alarmas. Se determina un umbral de detección. Se considerarán dos casos: s=0 y s 0. Para s=0: Si la señal excede el umbral, “aparecerá” un blanco, a pesar de que no hay ninguno realmente. Probabilidad de obtener una falsa alarma vs nivel de umbral. La probabilidad de una falsa alarma también se puede expresar como la fracción del tiempo en que se cruza el umbral dividido por el tiempo total de observación. f) Detección. Para s 0: hay un blanco. La probabilidad de detectar el blanco se da como resultado del área bajo la curva de la distribución de Poison. Proceso de diseño: I. II. III. IV. aceptable: Encontrar la para la elegida. Elegir una aceptable: . Para la y elegidas, calcular la relación señal-ruido SNR. Elegir una g) Integración de pulsos. El factor de eficiencia ( Con: ) se define como: relación señal-ruido para un solo eco. relación señal-ruido necesaria para obtener la misma integrar n ecos. que en La mejora en la relación señal-ruido cuando se integran n ecos se denomina factor de mejora en la integración: Figura de Skolnik: . al Nº de falsas alarmas: Sabiendo que es la potencia media (la mitad de la potencia máxima instantánea) cuando se trabaja con un tren de pulsos. La ecuación del radar queda: Proceso de diseño usando las gráficas 1 y 2: I. Elegir un II. Elegir un III. Para el entre entre 0.5 y 0.99; y junto con y elegidos, determinar , calcular de la gráfica 1. a partir de la gráfica 2. h) Sección radar. La sección radar (RCS=Radar Cross Section= ) de una esfera relaciona la potencia reflejada hacia la fuente y la densidad de potencia incidente. En una esfera de radio “a”: Si Si . La sección radar de la esfera será casi inapreciable. . La sección radar será la de la circunferencia de radio . Una antena directiva emite una señal pulsada, siendo la respuesta la reflexión en el blanco (debida a la discontinuidad eléctrica entre el aire y el objeto). Precisión es la bondad en la medida de la posición de un blanco. Resolución es la capacidad de distinguir entre dos blancos próximos. Relación entre el tiempo de repetición de impulsos y el alcance máximo al que se encuentra un blanco, cuya respuesta llegue la radar antes de emitir éste un segundo pulso. Con: PRF Tiempo de repetición de interrogaciones. : duración del impulso. Mediante la técnica STAGGER, es decir, variando el PRF en cada pulso respecto a un valor central se consigue identificar cuáles de los blancos son reales y cuales ambiguos (distancia superior a la máxima no ambigua). Depende de dos factores: duración de los pulsos y tiempo muerto del receptor, es decir, tiempo transcurrido entre la emisión de un pulso y el funcionamiento del duplexor para iniciar la recepción de respuestas. El tiempo que está iluminado un blanco por el haz de un PSR será: Con anchura del lóbulo principal (±3 dB). RPM giro de la antena en revoluciones permanente. El número de interrogaciones realizadas, en ese tiempo, por un PSR será: Con PRF frecuencia de repetición de impulsos. Blancos fijos. Blancos móviles. Son los que se van a estudiar. Blancos meteorológicos. Consiste en la variación de longitud de onda sufrida por la luz que emite un cuerpo en movimiento. En el caso del radar, el movimiento se refiere al que existe entre blanco y PSR. Si es R la distancia entre blanco y PSR, el número de longitudes de onda en el camino será: Si el blanco está en movimiento (radial), la diferencia de fase será: Se considerará blanco fijo cuando la diferencia de fase sea nula: En el PSR, la frecuencia Doppler es pequeña: . En sucesivas exploraciones, cambia la fase de los blancos móviles que permite discriminar el clutter*. Posibles problemas: Velocidades ciegas. . *Clutter: todos aquellos ecos (señales de RF) recibidos por el radar que no son deseados. Solución: Stagger: PRF varía con el tiempo. CONTROLADOR CENTRAL. Control funcionalidades del radar. Marca el sincronismo. Envío de señal al transmisor para emitir. FUNCIÓN DE TRANSMISIÓN. Amplificador de potencia. El modulador determina la forma del pulso: cuándo hay radiofrecuencia o cuándo no. FUNCIÓN DE RADIACIÓN. El duplexor conmuta transmisor y receptor. ACP: Acimut Counter Pulse. ARP. La antena tiene un registro digital de la rotación. FUNCIÓN DE RECEPCIÓN. MTI. Distinción entre blancos fijos y blancos móviles. FUNCIÓN DE PROCESAMIENTO. Determina la posición de los blancos (acimut) a partir de la señal del receptor. FUNCIÓN DE PRESENTACIÓN. Tratamiento de datos. Transmisión de señal de alta potencia. Es la parte más importante. Parámetros: Potencia pico, potencia media, forma de pulsos, ancho de banda de trabajo, eficiencia, ganancia, espurios, armónicos… Tipos de configuración de transmisores: Modulación de alto nivel. El transmisor a su vez es oscilador. Amplificador autoexcitado (oscilador de potencia). Desventaja: no hay control de las fases. No coherentes. Modulación de bajo nivel. Amplificador de potencia. Ventaja: control de la fase. Coherentes. Clasificación tubos electrónicos: (magnetrón, klynstron, TWT o tubo de ondas progresivas): Campos cruzados/Tipo M: Los campos eléctrico y magnético son perpendiculares entre sí. Los electrones llevan trayectorias curvas. MAGNETRÓN KLYNSTRON TWT Haz lineal/Tipo O: Los campos eléctrico y magnético con paralelos entre sí. Los electrones llevan trayectorias fijas. Transistores de estado sólido: mayor fiabilidad, rendimiento, más simples y mayor ancho de banda. Diodos GUNN, IMPATT, TRAPATT. Transistores bipolares, FET. Un lóbulo de radiación es una porción del diagrama de radiación limitada por regiones de mínima intensidad. Lóbulo mayor o principal es el lóbulo que contiene la dirección de máxima intensidad. Lóbulo menor es cualquier lóbulo que no sea el mayor. Lóbulo lateral son los adyacentes al lóbulo mayor. Lóbulo posterior es un lóbulo menor que tiene la dirección opuesta al lóbulo principal. La directividad para antenas con un solo lóbulo principal intenso y lóbulos menores despreciables, se puede calcular aplicando: Con anchura del lóbulo en un plano en radianes. anchura del lóbulo en el plano ortogonal al primero en radianes. Ganancia en una dirección dada se define como 4π veces el cociente entre la intensidad de radiación y la potencia a la entrada de la antena: Con eficiencia de la antena. La ganancia máxima se relaciona con la directividad máxima mediante: 1940: Desarrollo en UK bajo el nombre MARK I: IFF, interrogación y respuesta a la misma frecuencia 1942: Refinamiento de la versión MARK I realizada por UK. 1943: Desarrollo nueva versión denominada MARK III por UK y USA. Banda de trabajo de 157 MHz a 187 MHz. 1945: Desarrollo nueva versión denominada MARK V por UK, USA y Canadá. IFF; interrogación: dos impulsos a 950 MHz; separación entre impulsos define modos 1, 2 y 3; respuesta mediante tren de impulsos a 1.150 MHz. 1946: Paralización del programa por la finalización de la 2ªGuerra Mundial. 1952: FAA y DoD inician el desarrollo de una nueva versión (civil/militar). 1957: Finaliza el desarrollo del IFF/SSR conocido para aplicaciones civiles como el ATCRBS y militares como MARK-X. Interrogación: dos impulsos a 1.030 MHz. Separación entre los impulsos define modos 1, 2, 3/A, B, C y D. Respuesta: tren de 15 impulsos a 1.090 MHz. Altitud en Modo C. Código SSR en Modo 3/A. 1960: La FAA inicia despliegue del SSR. Adopción por OACI del SSR para vigilancia, especificaciones publicadas en el Anexo 10. 1962: Aceptación por OACI del tercer impulso de interrogación e inclusión en el Anexo 10. 1967: Uso obligatorio del transpondedor (equipo de a bordo) por encima de FL180 en el espacio aéreo de USA. 1969: Aceptación OTAN bajo la especificación STANAG-5017. 1971: Mejora del SSR aplicando la técnica monopulso. 1974: Desarrollo de la interrogación selectiva (ADSEL) en UK auspiciado por la CAA. 1975: Desarrollo de la interrogación discreta (DABS) en USA auspiciado por la FAA. 1985: Adopción por OACI del SSR Modo S y publicación de las especificaciones en el Anexo 10. 2000: Estados miembros de Eurocontrol deciden implantar el SSR Modo S. 2003: Implantación de la vigilancia elemental Modo S en Centro-Europa. 2005: Implantación de la vigilancia mejorada Modo S en Centro-Europa. 1974: Primer SSR instalado en Madrid . 1989: Primer MSSR (2 canales) instalado en Valencia. 1996: Primer MSSR (3 canales) instalado en Valladolid. 2005: Prevista la instalación de un prototipo MSSR-Modo S (vigilancia mejorada) en Valladolid. El SSR se caracteriza porque sus respuestas a las interrogaciones son activas. Las funciones del SSR se podían clasificar en: Detección: Reflexión activa de la energía electromagnética. Localización: Distancia y Dirección del blanco con respecto a la estación Radar. Identificación simple: Añadir a la respuesta elemental un tercer impulso denominado SPI. Enlace de datos: Capacidad de intercalar pulsos entre los dos correspondientes a una respuesta. La presencia o no de pulsos generará una codificación. Los datos codificados representarán la clave asignada a la aeronave y la altitud de la misma. La señal transmitida por el SSR se denominará Interrogación, que será una señal de RF pulsada, que se representará en la forma: Las envolventes de la señal de RF de los tres pulsos serán iguales con las siguientes características: La separación entre los pulsos P1 y P3, medida entre los flancos de subida en el punto de media amplitud, definirá los diferentes modos definidos, así como su aplicación y carácter en la forma: El salto entre 8μs a 17μs se realiza para no utilizar el valor de 12μs que podría interferir a los TACAN. IFF: identificación amigo-enemigo. ID: identificación código SSR. ND: no definido. La emisión del pulso P2 tendrá como misión el evitar la interrogación a las aeronaves por lóbulos laterales, SLS ó ISLS, y se emitirá de forma omnidireccional. Los pulsos P1 y P3 se emitirán de forma direccional, mediante un DDR con un lóbulo principal, de anchura en el plano horizontal, normalmente de 2,4º. La amplitud del pulso P2 deberá satisfacer las exigencias siguientes: Será igual o superior al nivel de la señal P1 fuera del lóbulo principal del DDR. Será inferior al menos en 9 dB al nivel de la señal P1 dentro del lóbulo principal del DDR. La señal de RF tendrá una frecuencia de 1.030 MHz ±0,2 MHz. La polarización de las señales de interrogación será nominalmente vertical. La señal transmitida por el transpondedor, equipo a bordo de la aeronave, se denominará respuesta. La respuesta será una señal de RF pulsada, que se representará en la forma: Las envolventes de la señal de RF de los 15 pulsos serán iguales con las siguientes características: Los pulsos F1 y F2 se denominan de encuadre. La tolerancia en la separación de los pulsos, medido con respecto a F1 será de ±0,1μs. La tolerancia en la separación del pulso SPI con respecto a F2, será de ±0,1μs. La tolerancia de un pulso Ii con respecto a otro Ij, siempre que Ii no sea F1, será de ±0,15μs. Los doce pulsos de información, presentes o no, dentro de los pulsos de encuadre F1 y F2 podrán adoptar 4.096 valores distintos. La codificación de los doce pulsos de información se realizará mediante cuatro dígitos ABCD en base octal. Las respuestas a interrogaciones en los Modos A y C se codificarán en la forma de Identificación y Altitud. La señal de RF tendrá una frecuencia de 1.090 MHz ±3 MHz. La polarización de las señales de respuesta será nominalmente vertical. El código se seleccionará entre los 4.096 códigos posibles. Se decodificará de la forma ABCD. El valor numérico para cada letra estará comprendido entre 0 y 7. Los códigos de especial significado serán: 7700: emergencia 7600: avería en comunicaciones 7500: apoderamiento ilícito Los códigos utilizados por el SSR serán: 7777: transpondedor fijo 7776: blanco interno generado para prueba por el SSR La codificación A empleada por la aviación militar empezará generalmente por el valor 0 El impulso SPI se transmitirá en una respuesta en Modo A, cuando sea seleccionado por el piloto, durante un periodo de tiempo comprendido entre 15s y 30s. La altitud barométrica a codificar estará comprendida entre -950 ft y 126.750 ft en incrementos de 100 ft. El reglaje altimétrico se realizará con referencia a la isobara de 1.013,25 hPa. Se decodificará de la forma DABC. La codificación seguirá las reglas siguientes: D1 siempre será cero. C1 y C4 nunca tendrán el valor 1 en una misma respuesta. C1, C2 y C4 nunca tendrán el valor 0 en una misma respuesta. Los grupos de impulsos que conforman A, B y D se codifican según el código GRAY Los grupos de impulsos que conforman C se codifican según el código GILHAN (reflex) según: EJEMPLO DE CODIFICACIÓN EN MODO C. Enlace ascendente. Enlace descendente. Interrogador. Equipo en tierra. Transpondedor. Equipo a bordo. Pérdidas debidas a la atenuación atmosférica: 0.0027 dB/NM. Enlace ascendente. Valores nominales. Efecto atenuación atmosférica: Márgenes. Admitiendo un Pérdidas adicionales Pérdidas adicionales Enlace descendente. Valores nominales. Efecto atenuación atmosférica: Márgenes. Pérdidas adicionales Pérdidas adicionales La probabilidad de detección de un blanco vendrá dada por la expresión: El número de interrogaciones nominales que recibirá un transpondedor dentro de la cobertura de un SSR por giro de antena será: Vigilancia en ruta: 5 rpm. T=12 s. Vigilancia en TMA: 15 rpm. T=4 s. Radar convencional: técnica de la ventana deslizante. Número de respuestas mínimo: 6. Radar monopulso. Número de respuestas mínimo: 2. El continuo aumento de la densidad de tráfico pone de manifiesto los problemas inherentes a la tecnología empleada en el SSR. La evolución planteada en el dominio vigilancia, dentro de las organizaciones OACI y Eurocontrol, es: Reducirá el error en acimut del orden de 1/10 con respecto al SSR Permitirá reducir el PRF. Facilitará el proceso de extracción y resolución de situaciones de encabalgamiento. Disminuirán ligeramente los errores debidos a multitrayectos. Altamente preciso. Fiable. Inmune a Interferencias. Enlace de datos bidireccional. La técnica de ventana deslizante obtiene el apuntamiento de la siguiente forma: Las pérdidas en el comienzo y en el final de la detección darán como resultado una pérdida de exactitud. La información suministrada por el procesador de señales se puede representar por una matriz bidimensional cuyos elementos sean 0 ó 1. La representación matricial será la siguiente: El funcionamiento de la ventana deslizante será: Se fijará el tamaño de la ventana: m. Se establecerá que cuando la suma de unos sea mayor de un determinado umbral se fijará el acimut inicial del blanco. Se establecerá, posteriormente, que cuando las suma de unos es menor de un determinado umbral se fijará el acimut final del blanco. El acimut del blanco será: El valor de F representa la inercia de esta técnica para el establecimiento de los y ; presentando el grave problema de que perdidas de información en el entorno de la declaración de ambos acimuts da lugar a errores importantes en el valor de . Esta técnica necesita trabajar con PRF elevados, derivado de su propia concepción. La representación gráfica del funcionamiento de la ventana deslizante será: El objetivo de la técnica monopulso es obtener el acimut del blanco con una sola respuesta. Los dos métodos empleados para mejorar la exactitud en acimut serán: Monopulso de amplitud. Monopulso de fase. Consideremos una antena parabólica con dos fuentes emisoras muy próximas en la forma: La medida de las amplitudes de las señales dará como resultado: Los problemas que tendríamos que resolver para aplicar este método serán: Independizar la amplitud de la señal recibida respecto a la distancia. Ambigüedad de la dirección de la señal recibida con relación al apuntamiento de la antena . Está basado en el uso de un amplificador logarítmico y un detector en la forma: La relación aditiva se definirá como: Consideremos dos antenas parabólicas separadas una distancia dada en la forma: Las señales recibidas tendrán la misma amplitud pero su diferencia de fases será: Los problemas que tendremos que resolver al aplicar este método serán: Controlar periódicamente las variaciones de d y aplicarlas. Disponer de un dispositivo que impida las variaciones de d por condiciones ambientales (método muy costoso). Está basado en el uso de un amplificador limitador y un detector de fase en la forma: La señal a la salida estará normalizada en amplitud. Las relaciones y serán: La técnica monopulso demandará las exigencias siguientes: Antena. Procesador. Tabla de calibración. La antena deberá entregar al procesador monopulso una señal que inherentemente llevará el ángulo comprendido entre la dirección del apuntamiento de la antena y la señal recibida. La generación de los tres diagramas de radiación Σ, Δ y Ω se obtendrá mediante una antena de síntesis. Este tipo de antenas combina las señales en amplitud y fase en redes para obtener el objetivo buscado. Los DDR serán el medio para averiguar el acimut del blanco y en consecuencia cualquier deformación en ellos dará como resultado una pérdida de exactitud en la determinación del acimut. El parámetro fundamental de los DDR será el punto de cruce entre los DDR Σ y Δ que deberá producirse a -3 dB del lóbulo principal del DDR Σ. El procesador monopulso entregará a su salida una señal que será proporcional al ángulo formado entre las direcciones correspondientes al apuntamiento de la antena y de la señal recibida. La tabla de calibración permitirá obtener el acimut de la señal recibida en función de la señal entregada por el procesador. Conocido podemos obtener: La curva monopulso cerca del apuntamiento de la antena será lineal y permitirá calcular el valor o ángulo comprendido entre las direcciones de apuntamiento de antena y señal recibida. El acimut de un blanco obtenido con dos respuestas será: La curva monopulso o tabla de calibración deberá cumplir con los requisitos siguientes: Ser lo más lineal posible. Tener una pendiente elevada. No ser ambigua. Ser antisimétrica. Los procesadores monopulso serán: De amplitud o no coherentes. De fase o coherentes. a) LOS PROCESADORES MONOPULSO DE AMPLITUD. a.1) Convencional. Diagrama de bloques: Curva monopulso: a.2) ADSEL. Diagrama de bloques: Curva monopulso: a.3) ADSEL modificado. Diagrama de bloques: Curva monopulso: b) LOS PROCESADORES MONOPULSO DE FASE. b.1) Tipo I. Diagrama de bloques: Curva monopulso: Las variantes que podrán aplicarse a la salida del detector de fase serán las siguientes: La estimación fundamental se realizará con la salida seno y la resolución de ambigüedad con la salida coseno. La mejor salida para establecer la medida se hará de la forma: Salida seno cuando . Salida coseno cuando . La estimación se hará con las salidas seno y coseno en la forma: b.2) Tipo II. Diagrama de bloques: Curva monopulso: B.3) Ángulo mitad o tres canales. Diagrama de bloques: El desfasador está controlado por tensión y está constituido por circuitos integrados, varicaps y condensadores. La variación de tensión modifica la fase. Los adaptadores y buffer tiene por misión adaptar las impedancias de entrada y salida a las etapas precedente y posterior. Curva monopulso: Desde los años 70 se produjo un fuerte despliegue de estaciones SSR. Al objeto de paliar sus limitaciones se gestó la idea de disponer de una interrogación selectiva. Solución especificada por OACI en 1983. Resuelve la problemática (sustituye la radiodifusión de interrogaciones por una pregunta selectiva a una aeronave en particular). Permite transmisión de información bidireccional. Para facilitar su implantación es completamente compatible con el SSR convencional (Modos A/C). Mismas frecuencias de enlace ascendente y descendente. Las aeronaves Modo S responderán a los SSR convencional en Modos A/C. Las aeronaves convencionales serán interrogadas por los SSR Modo S. Diferencias: Formato y estructura del mensaje. Tipo de modulación. Garantía de integridad de los datos. Interrogaciones de SSR convencionales: Modo A: Identificación de aeronaves (4096 códigos). Modo C: Altitud (de presión) de aeronaves. Interrogaciones de SSR Modo S: Interrogaciones en intermodo. Llamada general Modos A/C solamente. Llamada general Modos A/C/S. Interrogaciones en Modo S: Llamada general en Modo S solamente. Radiodifusión: Sin respuestas. Llamada selectiva. El SSR Modo S es un MSSR que incorpora la interrogación selectiva aportando esta funcionalidad las ventajas de: Limitar las interrogaciones a los blancos bajo su jurisdicción. Evitar el garble secuenciando las interrogaciones. El SSR Modo S deberá ser compatible con las aeronaves equipadas con transpondedor convencional en los Modos A y C. La interrogación y respuesta selectiva se realizará asignando una dirección de 24 bits a cada aeronave. El total de direcciones será224-2 ó16.777.214, al no utilizarse los 24 bits todos ceros o todos unos. El campo de dirección de 24 bits estará organizado en la forma: OACI podrá asignar a cada país, dependiendo del número de aeronaves que posea, un encabezamiento, podrá ir de uno a los cinco bloques establecidos. Las autoridades de aviación civil deberán asignar el resto de los bits a cada aeronave, una vez establecida la asignación de OACI. USA tiene asignado el primer bloque. UE tiene asignados los dos primeros bloques. Una estación MSSR Modo S deberá atender a los transpondedores convencionales y Modo S del siguiente modo; con PRF bajo y aplicación técnica del monopulso: La señal transmitida por el sensor Modo S se denominará Interrogación. La interrogación podrá ser de dos tipos: Intermodo. Selectiva en Modo S. La polarización de las señales de interrogación será nominalmente vertical. La señal de RF tendrá una frecuencia de 1.030 MHz ±0,01 MHz. La interrogación constará siempre de cuatro pulsos: Intermodo: P1, P2, P3 y P4. Selectiva en Modo S: P1, P2, P5 y P6. La interrogación intermodo permitirá la coexistencia de aeronaves equipadas con transpondedores convencionales y Modo S. La interrogación será una señal de RF pulsada cuya envolvente podrá representarse en la forma (P1, P2 y P3 son idénticos al SSR convencional): La separación S definirá el modo de interrogación en la forma: Modo A: S= 8μs. Modo C: S= 21μs. La anchura M, del pulso P4, podrá ser 0,8 μs ó1,6 μs. Las envolventes de la señal de RF de los cuatro pulsos serán iguales, a excepción de P4 ancho, con las siguientes características: 0,05μs ≤tS≤0,1 μs. 0,05μs ≤tB≤0,2 μs. Anchura de los pulsos P1, P2 y P3: 0,8 μs ±0,1 μs. Anchura del pulso P4: Largo 1,6 μs ±0,1 μs. Estrecho 0,8 μs ±0,1 μ. La emisión del pulso P2 tendrá como misión el evitar la interrogación a las aeronaves por lóbulos laterales, SLS ó ISLS, y se emitirá de forma omnidireccional. Los pulsos P1, P3 y P4 se emitirán de forma direccional, mediante un DDR muy estrecho, lóbulo principal, en el plano horizontal, nominalmente de 2,4º. La amplitud del pulso P2 deberá satisfacer las exigencias siguientes: Será igual o superior al nivel de la señal P1 fuera del lóbulo principal del DDR. Será inferior al menos en 9 dB al nivel de la señal P1 dentro del lóbulo principal del DDR. Las amplitudes de los pulsos P1, P3 y P4 serán iguales. La anchura del pulso P4 definirá el comportamiento del transpondedor Modo S en la forma: No se generará respuesta cuando M= 0,8 μs. Se generará respuesta cuando M=1,6 μs. La interrogación selectiva será una de las funciones específicas en Modo S. La interrogación será una señal de RF pulsada, cuya envolvente podrá representarse de la forma: Las envolventes de la señal de RF de los pulsos P1, P2 y P5 serán iguales y con las mismas características que las descritas anteriormente. La envolvente de la señal de RF del pulso P6 responderá a las mismas exigencias que P1, en cuanto a ts y tB, sin embargo la anchura será: P6 largo: 30,25μs ±0,25μs. P6 corto: 16,25μs ±0,25μs. Los pulsos P1 y P2 de igual amplitud para provocar una inhibición de la respuesta en los transpondedores convencionales. El pulso P6 contendrá información digital, mediante una modulación de fase. La amplitud del pulso P5 deberá satisfacer las exigencias: Será igual o superior al nivel de la señal P6 fuera del lóbulo principal del DDR. Será inferior al menos en 9dB al nivel de la señal P6 dentro del lóbulo principal del DDR. Los pulsos P1, P2 y P6 se emitirán de forma direccional, mediante un DDR muy estrecho, lóbulo principal, en el plano horizontal, nominalmente de 2,4º. Las amplitudes de los pulsos P1, P2 y P6 serán iguales. El pulso P5 tendrá como misión el impedir la interrogación por lóbulos laterales al enmascarar la inversión de fase síncrona del pulso P6. La estructura del pulso P6 será: 1,25μs de emisión de portadora pura para sincronizar las frecuencias del interrogador y transpondedor. Inversión de fase síncrona que constituirá la referencia de tiempo para el transpondedor. 0,5μs de emisión de RF pura. 56 ó112 intervalos de tiempo de 0,25μs para emitir RF pura modulada en DPSK al objeto de conseguir 56 ó112 bits de información. 0,5μs de emisión de RF pura como guarda. La modulación será del tipo DPSK con las características siguientes: Definirá dos estados de fase de 0ºy 180ºcada uno de ellos con una tolerancia de ±5º. Una inversión de fase definirá un 1 lógico y en el caso opuesto será un 0 lógico. La duración de la inversión de fase será inferior a 0,08μs. Un elemento será considerado como el intervalo de 0,25μs entre posibles inversiones de fase de datos. Velocidad de manipulación 4 Mbps. La señal transmitida por el transpondedor, equipo a bordo de las aeronaves, se denominará respuesta. La polarización de las señales de respuesta será nominalmente vertical. La señal de RF tendrá una frecuencia de 1.090 MHz ±1MHz. La respuesta será una señal de RF pulsada, cuya envolvente podrá representarse en la forma: La envolvente de la señal de RF de todos los pulsos que constituirán una respuesta serán iguales con las siguientes características: 0,05μs ≤tS≤0,1 μs. 0,05μs ≤tB≤0,1 μs. Anchura del pulso: 0,5μs ±0,05μs. La estructura de la señal de respuesta está organizada en la forma: Preámbulo: 4 pulsos, asociados de dos en dos. Bloque de datos: 56 ó112 pulsos, para transmitir 56 ó112 bits. El bloque de datos codificará la información por posición del pulso dentro del periodo de tiempo de 1μs asignado a un bit en la forma: Pulso situado en los primeros 0,5μs: significará un 1 lógico. Pulso situado en los segundos 0,5μs: significará un 0 lógico. La velocidad de manipulación será de 1 Mbps. La diferencia de amplitudes entre dos pulsos cualesquiera no deberá ser superior a 2 dB. El bloque de datos de interrogaciones y respuestas estarán constituidos por 56 ó112 bits codificados en DPSK y PPM respectivamente. Los mensajes tanto ascendentes como descendentes estarán protegidos contra errores mediante la codificación de verificación de paridad. El bloque de datos estará organizado en la forma: Descripción de formato. Enlace ascendente (uf). Enlace descendente (df). Campos de información. Subcampos de información. Los mensajes no asignados a codificación estarán a 0. Dirección paridad (ap). Se utilizará en todos los uf y df definidos actualmente excepto en el df-11 y df-17. La paridad estará superpuesta a la dirección de la aeronave. Paridad identificador del interrogador (pi). Se utilizará exclusivamente en el df-11 y df-17. La paridad estará superpuesta al código de identificación del interrogador. La estructura de los mensajes ascendentes será: La estructura de los mensajes descendentes será: Los campos definidos hasta la actualidad son: CAMPO DESIGNADOR MA MB MC MD ME ME MV NC ND PC PI PR RC RI RL RR SD UF FUNCIÓN UM Mensaje, Com-A Mensaje, Com-B Mensaje, Com-C Mensaje, Com-D Mensaje, sñ espontáneas Mensaje, ACAS Mensaje, ACAS Nº del segmento-C Nº del segmento-D Protocolo Paridad/identificador de Probabilidad de respuesta Control de respuesta Información de respuesta Longitud de respuesta Petición de respuesta Designador especial Formato de enlace ascendente Mensaje de utilidad VS Situación vertical FORMATO UF DF 20, 21 20, 21 24 24 17 16 16 24 24 4, 5, 20, 21 11, 17 11 24 0 0 4, 5, 20, 21 4, 5, 20, 21 Todos 4, 5, 20, 21 0 DESIGNADOR ACS AIS ATS BDS1 BDS2 IDS IIS LOS LSS MBS MES RCS RRS RSS SAS SCS SIC SIS SRS SSS TAS TCS TMS TRS SUBCAMPO FUNCIÓN Subcampo de código de altitud Subcampo de identificación de aeronave Subcampo de tipo de altitud Subcampo 1 de selector de datos Com-B Subcampo 2 de selector de datos Com-B Subcampo de designador de identificador Subcampo de identificador de interrogador Subcampo de bloqueo Subcampo de vigilancia de bloqueo Subcampo Com-B multisitio Subcampo ELM multisitio Subcampo de control de régimen Subcampo de petición de respuesta Subcampo de estado de reserva Subcampo de antena de superficie Subcampo de capacidad de sñ espontáneas Capacidad de identificador de vigilancia Subcampo de identificador de vigilancia Subcampo de petición de segmento Subcampo de estado de vigilancia Subcampo de acuse de recibo de tx Subcampo de control de tipo Subcampo de mensaje táctico Subcampo de régimen de transmisión CAMPO ME MB MB MB MB UM SD, UM SD SD SD SD SD SD SD SD MB MB SD MC ME MD SD SD MB Consideraremos un campo de datos en donde k podrá ser 32 u 88. El campo de datos se podrá representar mediante la forma polinómica siguiente: Estableciendo como polinomio generador el dado por: El campo de dirección de una aeronave, 24 bits, podrá representarse mediante: La dirección de paridad, AP, en el enlace ascendente, UF, se obtendrá en la forma: La dirección que se utilizará en el mensaje UF-11, para conformar la AP, estará constituida por 24 unos, al ser una llamada general. Los mensajes de radiodifusión se realizarán con UF-20 óUF-21, sustituyendo la dirección de la aeronave por 24 unos. Los transpondedores asociados a los sistemas anticolisión de a bordo aceptarán una radiodifusión con UF-16, sustituyendo la dirección de la aeronave por 24 unos. La dirección paridad, AP, o paridad interrogador, PI, en el enlace descendente, DF, se obtendrá en la forma: El valor de ai en AP será la dirección de la aeronave. El valor de ai en PI se obtendrá: CL: etiqueta de código, significará: 0 0 0 el IC equivaldrá al II. 0 0 1 el IC contendrá los SI del 1 al 15. 0 1 0 el IC contendrá los SI del 16 al 3. 0 1 1 el IC contendrá los SI del 32 al 47. 1 0 0 el IC contendrá los SI del 48 al 63. IC: código del interrogador. II: identificador del interrogador. SI: identificador de vigilancia. La dirección que se utilizará en el mensaje DF-11, para conformar la PI, como respuesta a una interrogación de llamada general será de 24 ceros. La dirección que se utilizará en el mensaje DF-17, para conformar la PI, será de 24 ceros. El interrogador en Modo S deberá conocer las direcciones de las aeronaves situadas dentro de su volumen de cobertura. Las técnicas que se podrán utilizar, durante el periodo de tiempo destinado a funcionar como MSSR serán: Llamada general no selectiva. Llamada general Modo S. Llamada general Modo S estocástica. Llamada general Modo S estocástica con desbloqueo. La interrogación con el pulso P4 corto hará que respondan los transpondedores convencionales en los Modos A y C. La interrogación con el pulso P4 largo hará que respondan tanto los transpondedores convencionales como en Modo S. La interrogación con el pulso P4 largo presentará la problemática siguiente: No se mitigará el problema del garble, sino que aumentará. Esta técnica es contraria a la filosofía de llamada selectiva. La respuesta Modo S a una llamada general no selectiva se hará con el mensaje DF-11. La interrogación se realizará con el mensaje UF-11 que incluirá: El código del interrogador, IC. La etiqueta del código, CL. Una vez adquirida la aeronave se procederá al bloqueo del transpondedor para que no responda a nuevas llamadas generales Modo S durante un tiempo establecido. La respuesta se realizará con el mensaje DF-11. Las situaciones de garble en llamada general Modo S podrán aumentar al ser las respuestas de una longitud muy superior a la de los Modos A y C. La interrogación se realizará con el mensaje UF-11 que incluirá: El código del interrogador, IC. La etiqueta del código, CL. La probabilidad de respuesta. La probabilidad de respuesta se seleccionará entre 1, 1/2, 1/4, 1/8 y 1/16 comenzando desde la más baja a la más alta. El transpondedor, una vez recibida la probabilidad de respuesta, generará un número aleatorio comprendido entre cero y uno, y, si este fuese igual o menor que el valor recibido del interrogador, responderá. La distribución aleatoria de respuestas permitirá el adquirir el 60% de las aeronaves en aproximadamente cuatro vueltas de antena. Las situaciones de garble con las respuestas disminuye sensiblemente. La respuesta se realizará con el mensaje DF-11. Una vez adquirida la aeronave se procederá al bloqueo del transpondedor para que no responda a nuevas llamadas generales Modo S durante un tiempo establecido. El proceso de llamada y respuesta será idéntico al enunciado como llamada general estocástica. Esta modalidad incluirá en el campo de probabilidad de respuesta la orden de no tener en cuenta el bloqueo, permitiendo la adquisición de aeronaves por estaciones con coberturas solapadas que utilicen el mismo código de identificación. Se describirán, en forma general, la información contenida en los mensajes, que considerados como principales, serán los siguientes: UF-0; DF-0. UF-4; DF-4. UF-5; DF-5. UF-11; DF-11. DF-17. La descripción exhaustiva del contenido de información en los mensajes definidos hasta la actualidad se encuentra indicada en el ANEXO 10 de OACI, volumen IV. La función de vigilancia permite al controlador conocer la situación exacta de cada aeronave, y de este modo: Gestionar de forma adecuada el espacio aéreo, verificando separaciones entre aeronaves. Asistir a los pilotos en la navegación. En la actualidad, la función vigilancia en áreas de alta densidad de tráfico está basada en radares secundarios (SSR), apoyados por primarios (PSR). En áreas oceánicas, se utilizan informes voz en HF/VHF. La función de vigilancia se divide en dos categorías: Dependiente: la posición de la aeronave se determina a bordo y se transmite Independiente: la posición de la aeronave se determina desde tierra, con o sin colaboración de ésta. SISTEMA PSR CLASE DE VIGILANCIA Independiente SSR Voz HF/VHF Cooperativa Cooperativa INFORMACIÓN SUMINISTRADA 3D 2D 3D 1D Radar primario (PSR): Vigilancia independiente del equipamiento de aeronave. Posición de la aeronave en 2-D (distancia + azimut). Tradicionalmente de uso militar. Utilizado para vigilancia civil fundamentalmente en TMA. Radar secundario (SSR) Modo A/C: Vigilancia de aeronaves que poseen transpondedor SSR. Posición 2D+ altitud barométrica + identidad de la aeronave. La aeronave coopera (mediante el transpondedor, CIS). Modo S: interrogación selectiva. Radar de Superficie (SMR): Surface Movement Radar. APLICACIÓN Militar Militar/Civil Militar/Civil Civil Informes de posición por voz: Depende de la transmisión por parte del piloto. Utilizado en zonas sin cobertura radar (oceánicas). En cobertura: limitación línea vista, zonas ciegas, cono silencio, bajas altitudes. En solapes (garbling). En respuestas falsas (fruit). En coste. En impacto medioambiental (contaminación visual: tamaño, localización; contaminación electromagnética: radiación). Comité FANS de OACI. En torno a los años 80/90 OACI creó el comité FANS (Future Air Navigation Systems) para el estudio de un sistema global CNS que solventara problemas existentes y previstos. La solución propuesta por el Comité FANS estaba basada en sistemas de Comunicaciones, Navegación y Vigilancia basados fundamentalmente en satélite. El sistema que daba solución a los problemas de Vigilancia era el sistema ADS. La vigilancia dependiente automática es una técnica por la que una aeronave proporciona al centro de control, vía enlace de datos, información extraída de los sistemas de navegación y posicionamiento de a bordo. Los datos proporcionados serán entre otros: identificación de la aeronave; posición en 4D (λ; φ; Alt y t); intención de vuelo. La ADS engloba en su definición los conceptos siguientes: Vigilancia: facilita la posición de la aeronave en 4D. Dependiente: función de los sistemas de navegación y comunicaciones a bordo de las aeronaves. Automática: no necesita la intervención del piloto. La ADS se ha concebido como un facilitador de los nuevos conceptos ATM; y además es una técnica que proporciona mejoras en la seguridad y en la capacidad. Definición según OACI: Técnica de vigilancia por la que una aeronave proporciona, vía enlace de datos, una serie de parámetros extraídos de los sistemas de navegación y posicionamiento de abordo. Entre los datos proporcionados se incluye la identificación de la aeronave, su posición en cuatro dimensiones (las tres coordenadas espaciales y el tiempo) y otro tipo de información, como puede ser la intención de vuelo. La ADS utiliza el enlace de datos o datalink. La ADS NO es un datalink sino una datalink application. ADS y radar se complementan. ADS-C ofrece vigilancia en zonas no cubiertas por radar. ADS ofrece información adicional al radar (intención de vuelo). Actualmente OACI no ha aprobado separaciones ADS menores o iguales a las radar. ADS ofrece incentivos medioambientales (potencia radiada, ecología, coste....). ADS-C (Contrato): Los datos se envían al centro ATS con el que se ha establecido previamente un contrato. ADS-B (Broadcast): Los datos son difundidos y son recibidos por todo receptor (en aire o tierra) dentro de cobertura. En la ADS-C los datos de a bordo de la aeronave se envían punto-a-punto al centro de control. La ADS-C es también denominada ADS-A A=addressed, dirigida a un centro de control) Diálogo bidireccional aire-tierra: Tierra-aire: establecimiento de contrato. Aire-tierra: envío de información solicitada. Hasta 4 centros de control pueden establecer de manera simultánea contratos con la aeronave. La ADS-C requiere el establecimiento de un Contrato: el contrato son las condiciones que van a regir el intercambio de datos. El intercambio de datos ADS-C entre aire y tierra comienza siempre con el “log-on”, que es iniciado por el piloto. El log-on permite al centro de control proporcionar aplicaciones de datalink a una aeronave. En el log-on la aeronave informa a tierra de su identidad y de sus capacidades datalink (p.e. Capacidad ADS versión 1, CPDLC versión 3, etc). Log-on: DLIC (Data Link Initiation Capability). CM (Context management). AFN (ATS Facilities Notification). El log-on puede ser manual o automático. El log-on manual se efectúa en las situaciones: Al partir el vuelo (si parte dentro de un FIR que ofrece servicios de datalink. Al entrar en un FIR que ofrezca servicios de datalink (proveniente de otro FIR que los ofrecía). Al recibir el piloto solicitud de reiniciar una conexión que ha fallado. El log-on automático se efectúa al transferir responsabilidad de un centro a otro. La ADS-C requiere el establecimiento de un contrato. El contrato son las condiciones que van a regir el intercambio de datos. El contrato es un “acuerdo” entre aeronave y sistema de tierra. No es un contrato comercial/económico. El contrato se establece entre aeronave y sistema de tierra. El controlador conoce el contrato establecido. El contrato indica: Cuándo/con qué frecuencia deben ser enviados. Qué datos deben ser transmitidos en cada informe. TIPOS DE INFORMES. a) INFORME ADS BÁSICO. El informe ADS BÁSICO lo constituyen los datos que deben ser transmitidos en cada informe: Posición (lat, long, nivel). Time stamp. Figura de Mérito (FOM). El FOM, principalmente, es una medida de la precisión de los datos de navegación. Valores del FOM: 0 (peor caso) al 7 (mejor caso). El FOM se degrada si no se actualiza la información de navegación (p.e. Fallo de GPS). El FOM normalmente no se presenta directamente al controlador sino que es utilizado por el sistema para decidir la fiabilidad de la información ADS. Adicionalmente, el FOM indica la existencia de redundancia en el sistema de navegación y el funcionamiento del ACAS. b) INFORME ADS EXTENDIDO. Qué datos pueden, opcionalmente, ser transmitidos en cada informe (si han sido solicitados desde tierra): Aircraft/Airframe Identification. Ground Vector. Air vector. Projected profile. Meteorological Information. Short term intent / Intermediate intent. Extended projected profile. TIPOS DE CONTRATOS ADS-C. a) PERIÓDICO: envío a intervalos definidos por tierra. El contrato periódico es una petición del centro de control para que la aeronave le envíe información ADS a intervalos regulares/periódicos de tiempo. En el contrato o acuerdo periódico se indica ese intervalo de tiempo entre informes ADS y la información que deben contener. No puede haber más de un contrato periódico simultáneo entre una aeronave y un centro de control. Una vez se establece un contrato periódico, éste está vigente hasta que se cancela o se sustituye por otro contrato periódico. b) BAJO DEMANDA: envío de un único informe. El contrato por demanda es una petición del controlador para que en el momento de la solicitud la aeronave le envíe un único informe ADS. El contrato por demanda equivale a un contrato periódico con período = 0. La petición de un contrato por demanda NO afecta a ninguno de los contratos ya existentes. Evento: envío cuando un evento ocurre. El contrato por evento es una petición del centro de control para que la aeronave le envíe la información ADS únicamente cuando ocurra cierto evento. Pueden coexistir varios contratos por evento entre un centro de control y una misma aeronave. En FANS-1/A, una vez ocurre el evento, el contrato finaliza (excepto en el caso del “waypoint change”). Tipos de Eventos. Vertical rate change, cuando la velocidad vertical de la aeronave es mayor o menor al parámetro definido en la petición de contrato. Way-point change, se origina por el cambio en el Siguiente o Siguiente+1 waypoint. Este cambio ocurre normalmente debido al secuenciamiento normal de los WP en el FMS. El Siguiente o Siguiente+1 waypoint puede ser un punto de notificación ATS u otro insertado por el piloto. Lateral deviation change. Se origina cuando la posición real de la aeronave se encuentra desviada lateralmente en un cierto valor (definido en el contrato) respecto de la posición esperada de la aeronave de acuerdo con el plan de vuelo del FMS. Level/Altitude range deviation cuando la altitud de la aeronave excede los márgenes de altitud máxima o mínima definidos en el contrato. Level change. Airspeed change. Ground speed change. Heading change. Extended projected profile change. FOM (Figure of Merit) field change. Track angle change. c) EMERGENCIA: iniciado por la aeronave. Información que se envía: En cada informe: Posición (latitud y longitud). Time stamp. Figure of Merit (“error en la posición”+info adicional). En cada quinto informe: Aircraft address. Ground-Vector (track angle, ground speed, vertical rate) Periodo: el menor entre 60 segundos y la mitad de cualquier contrato periódico ya existente (si hay alguno establecido). TRANSFERENCIA NDA. Conceptos relacionados. CPDLC = Controller to Pilot Data Link Comunications. Implementación de ADS-C en Boeing y Airbus en “caja” FANS-1/A. FANS-1/A = ADS-C + CPDLC. ADS-C y CPDLC utilizan el mismo log-on. En la ADS-B los datos de a bordo de la aeronave son enviados en modo “difusión” (broadcast). La ADS-B no requiere la intervención del sistema de tierra. No se establece contrato. Información transmitida de manera periódica por la aeronave. Unidireccional: emisor (aire o tierra) y receptor (aire o tierra). Cualquier usuario (en el aire o en tierra) equipado con un receptor y dentro de la cobertura recibe la información. La aeronave/vehículo no sabe quién está recibiendo la información. Datos esperados en todos estándares: Airframe identifier. Latitude. Longitude. Altitude. Time. NUC. Navigation Uncertainty Category (NUC): NUCp, NUCr. Equivalente a Figura de Mérito. Da idea de fiabilidad de datos enviados. 10 posibles valores para posición. 5 posibles valores de velocidad. Aircraft identification. Emitter category. Otros posibles datos (no necesariamente en todos los estándares): Ground vector. Ground track, speed and vertical rate. Air vector. Heading, IAS or mach and vertical rate. Short term intent. Next waypoint and target altitude. Rate of turn. Aircraft type. Los sistemas de a bordo deben proporcionar todos los datos ADS-B, por ejemplo: Posición y ground vector: GNSS, INS/IRS, VOR/DME, FMS. Altitud barométrica: Altímetro. Identificación de la aeronave (callsign): piloto o FMS. Airframe identity: fijo („Hard-wired‟) en el transmisor o piloto. Waypoints: FMS. EN RUTA TMA Max update period 10s 5s Prob. Of update within period Position accuracy Instantaneous nº of aircraft to be supported Message latency 98% 98% SUPERFICIE AERÓDROMO 1 s (lower if stationary) 98% 350 m 1250 150 m 750 NM in 60NM radius 1s 3m 100 (motion) 150 (stationary) 1s 2s La información ADS-B es también recibida por otras aeronaves equipadas con receptor. La ADS-B permite vigilancia aire-aire. La información ADS-B recibida por una aeronave se representa en el CDTI (Cockpit Display of Traffic Information). El CDTI es una pantalla situada en cabina con fácil acceso por parte del piloto y que le permite hacer uso de la información ADS recibida. Durante la implantación de la ADS-B existirá un periodo de transición. No 100% aeronaves equipadas. Información de aeronaves NO equipadas no disponible para aeronaves equipadas (no aparecen en el CDTI). Aeronaves equipadas no consiguen beneficios. El TIS-B consiste en el envío (broadcast) de la información de vigilancia disponible en tierra: Gap filler. Full picture. La ADS-B se complementa con el servicio TIS-B. Las aeronaves equipadas reciben información de todo el tráfico circundante (equipado o no equipado). a) Vigilancia aire-tierra. Complementa y/o suplementa al radar. Proporciona información adicional (intención vuelo). Cobertura de vigilancia en zonas oceánicas y/o remotas. Complemento a la cobertura radar (a menor coste). Mejora de la gestión de conflictos (utilización de parámetros extraídos de a bordo sobre intención de vuelo). Permite introducción de nuevas aplicaciones operacionales que favorecen el aumento de eficiencia del controlador (potencialmente mayor capacidad y mayor seguridad). Comprobación de la consistencia del plan de vuelo en tierra y en el aire. Permite obtención de datos meteorológicos. b) Vigilancia aire-aire. Mejora de la adquisición visual del tráfico circundante. Información de tráfico circundante aparece en CDTI (Cockpit Display Traffic Information). Mantenimiento de separación longitudinal con aeronave en misma ruta y FL (a instancias del controlador). Avance hacia el “free-routing” y hacia el “free-flight”. c) Vigilancia en superficie. Complemento a las técnicas convencionales para vigilancia de aeronaves y vehículos de superficie. Los estándares definen: Contratos posibles. Comunicaciones a utilizar. Estándares. FANS-1 Boeing. FANS-A Airbus. CNS/ATM-1 (ICAO standard). Comunicaciones: Los bits que realmente se envían dependen del estándar utilizado, pero siempre son más que la información a enviar. CNS/ATM-1. Definido en las ATN SARPs, conocidas comúnmente como CNS/ATM-1 SARPs. Desarrolladas por el panel ATNP (ahora ACP – N). Material guía en “ICAO Manual of ATS Data Link Applications”. Desarrollado por el panel OPLINK Panel (antes ADS Panel). Las subredes de ATN están definidas en varias SARPs. FANS-1/A. Desarrollo por la industria antes de la finalización de las especificaciones de OACI. Basado en ACARS (Aircraft Addressing and Reporting System): sistema digital de transmisión en VHF (+otros). Aplicaciones FANS-1/A sobre ACARS: ADS-C CPDLC. FANS-1 (Boeing) y FANS-A (Airbus) son interoperables (pero existen diferencias). Ya implantados y en operación. FANS-1/A. ACARS. ACARS se desarrolló inicialmente para algo distinto del ATC (en concreto para el AOC). Se basa en los estándares ARINC 622, ARINC 620, ARINC 618. Añaden protección para la transmisión (CRC) ACARS definido como sistema orientado a la transmisión de caracteres (permite servicios bit-oriented mediante una conversión previa). FANS-1. Desarrollado por Boeing. Certificado y operacional. Gran número de aeronaves equipadas en el mundo. FANS A. Desarrollado por Airbus. Equipo validado y certificado (Julio 2000). Ciertas diferencias con Boeing. Tipos de aeronave incluye: A330, A340. FANS-1/A estándares. Estándares elaborados por: Airlines Electronic Engineering Committee (AEEC) y publicados por ARINC. ARINC 745: Define las aplicaciones ATS para ACARS, incluyendo ADS. ARINC 622: Define mejoras al enlace de datos ACARS para que pueda soportar aplicaciones ATS. ENLACE DE DATOS: SATÉLITE. FANS-1/A .-ENLACES AIRE-TIERRA: SATÉLITE. Frecuencia: banda L: 1,5 – 1,6 GHz. Coordinación entre las distintas aeronaves (compartición de la frecuencia entre todas las aeronaves): depende de la longitud del mensaje: Random access (para mensajes cortos): R-channel. TDMA (para mensajes “largos”): T-channel. FANS-1/A CNS/ATM-1 MINIMO 12 s 7.0 s MEDIA 27 s 11.9 s 95% 68 s 24.4 s MÁXIMO 2945 s 224.6 s CNS/ATM-1 VS FANS-1/A. Diferencias a alto nivel: Organismo de estandarización. Comunicaciones empleadas (y calidad/prestaciones). Disponibilidad para su uso hoy. Otras diferencias: Time stamping (en FANS minutos en la hora actual en lugar de fecha y hora completos). Datos opcionales (extended projected profile no en FANS). Funcionamiento de los contratos: intervalo entre informes; emergencia; eventos. INFORME EXTENDIDO. Qué datos pueden, opcionalmente, ser transmitidos en cada informe (si han sido solicitados desde tierra): Aircraft/Airframe Identification. Ground Vector. Air vector. Projected profile. Meteorological Information. Short term intent / Intermediate intent. Extended projected profile. Tipos de Eventos. Vertical rate change, way-point change, lateral deviation change, level/altitude range deviation, level change, airspeed change, ground speed change, heading change, extended projected profile change, FOM (Figure of Merit) field change, track angle change. CONTRATO POR EVENTO. El contrato por evento es una petición del centro de control para que la aeronave le envíe la información ADS únicamente cuando ocurra cierto evento. Pueden coexistir varios contratos por evento entre un centro de control y una misma aeronave. En FANS-1/A, una vez ocurre el evento, el contrato finaliza (excepto en el caso del “waypoint change”). CONTRATO DE EMERGENCIA. Único contrato iniciado directamente por la aeronave (aviónica o piloto). Información que se envía: Cada informe Posición (latitud y longitud). Time Stamp. Figure of Merit (“error en la posición” más info adicional). En cada quinto (5) informe Aircraft Address. Ground-Vector (track angle, ground speed, vertical rate). Periodo: en CNS/ATM-1 el menor entre 60 segundos y la mitad de cualquier contrato periódico ya existente (si hay alguno establecido). FUTURO. Hoy en día: FANS-1/A. Tendencia al aumento del número de aeronaves equipadas. Gran número de sistemas terrestres en funcionamiento. Futura evolución hacia CNS/ATM-1. Coexistencia de aeronaves FANS-1/A y CNS/ATM-1. Impacto en sistemas de tierra. Tecnología “más sencilla” de implementar. Tecnología también llamada ADS-B 1090. Desarrollado por el SICAS Panel de OACI (ahora SCRSP). Las aeronaves transmiten información (señales) de manera espontánea (sin necesidad de un estímulo externo). Permite aplicaciones TIS-B y FIS-B. Tecnología “más sencilla” de implementar por estar basada en un transpondedor radar modificado. Banda ancha. DESVENTAJAS. Acceso aleatorio. Frecuencia (RF) compartida con otros sistemas: TCAS / ACAS. Radar (M)SSR. Radar modo S. Frecuencia: utiliza la misma frecuencia y “tipo” de señal que el radar secundario: 1090 MHz. Coordinación entre las distintas aeronaves (compartición de la frecuencia entre todas las aeronaves). NO hay coordinación de las transmisiones (squitter = “señal errática”). Información transmitida: 112 bits de información ADS-B. Se puede clasificar en varios tipos de “squitter”. “Update rate”: posición+velocidad+tiempo dos veces por segundo Acceso al medio siempre que se tenga información que transmitir y sin tener en cuenta si otras estaciones están transmitiendo: peligro de colisiones entre squitters. Se introduce un jitter de valor uniformemente distribuido en ±100 ms (duración de un squitter= 0.120 ms) para evitar las interferencias síncronas entre estaciones. EL MENSAJE ADS-B DENTRO DEL SQUITTER. El campo DF (donwlink format): DF=17: mensajes ADS-B de aviones/vehículos equipados con transpondedor modo S. DF=18 mensajes ADS-B de aviones/vehículos no equipados con transpondedor modo S y para las transmisiones de mensajes TIS-B. DF=19: mensajes ADS-B transmitidos por equipos militares. El campo CA (capability): 3-bit (bits 6 through 8). Indica la capacidad del transmisor modo S. Se utiliza en especial en casos distintos a DF=17. TIPOS DE MENSAJES Y FRECUENCIA DE TRANSMISIÓN: ADS-B. Airborne Position Message. Airborne Velocity Message. Surface Position Message. Aircraft Identification (ID) and Type Message. On conditions: Target State and Status Message. Aircraft Operational Status Message. Aircraft Status Message. Los mensajes son transmitidos con mayor frecuencia de la que podría ser necesaria en el receptor. El tiempo entre mensajes varía: Ejemplo: Airborne position: transmitido a intervalos de dentro del entorno [0.4 - 0.6] s. Dos tipos de mensajes de posición: en vuelo o en la superficie. Precisión diferente. “Squat switch” utilizado para determinar si la aeronave está en tierra o no. El intervalo entre mensajes aumenta si la aeronave está estacionaria. TCAS/ACAS VS SQUITTER EXTENDIDO. Las aeronaves equipadas con TCAS transmiten un „acquisition squitter‟ (short squitter). Transmitido una vez por segundo por el transpondedor modo S. Utiliza las mismas frecuencias y protocolos que el modo S. Únicamente contiene información de identidad (nada más). Una buena opción: combinación de TCAS/ACAS y Extended Squitter. DESVENTAJAS. ANConf/11 de OACI demanda independencia de: TCAS (función seguridad). ADS (función vigilancia). VALIDACIÓN DE LA INFORMACIÓN. ESTADO DEL SQUITTER EXTENDIDO. SARPs publicadas. MOPS desarrolladas, pero evolucionando (Eurocae/RTCA). Ensayos realizados con diversos equipos. Muchas aeronaves equipadas para mode S: elementary surveillance. Actualmente muy pocas aeronaves capaces de transmitir extended squitters (y aún menos con squitter que contengan información). VDL= VHF Data Link. SARPS desarrolladas por el panel AMCP (ACP) de OACI. Las aeronaves transmiten información (señales) de manera controlada/organizada. Técnicamente: Proporciona comunicaciones punto a punto y comunicaciones de difusión. Tecnología sueca que permite varias aplicaciones: ADS-B + comms + nav: TIS-B. FIS-B. CPDLC. GRAS. COMPARATIVA CON OTROS VDL. VDL Mode 1. ATN compatible con ACARS. Comunicaciones punto a punto, CSMA, MSK, (2.4 kB/s). No usado, será borrado del Anexo 10. VDL Mode 2. Mejora impulsada por ARINC/SITA, como mejora del ACARS. Comunicaciones punto a punto, CSMA, D8PSK (31.5 kB/s), FEC. Soporta aplicaciones NO críticas en el tiempo. VDL Mode 3. Voz digital y comunicaciones de datos punto a punto (impulsado y desarrollado por la FAA), TDMA, D8PSK (31.5 kB/sek), FEC. VDL Mode 4. Soporta comunicaciones críticas en el tiempo. Comunicaciones en radiodifusión (broadcast) y punto a punto, STDMA, GFSK (19.2 kB/sek), no FEC. CARACTERÍSTICAS. Banda estrecha: varios canales de 25 kHz simultáneos. Requiere la reserva de una serie de canales en VHF (en la banda VHF 108....118-137 MHz). Requiere compartir la banda de VHF con otros sistemas. Coordinación entre las distintas aeronaves (compartición de la frecuencia entre todas las aeronaves). STDMA (self organised TDMA): acceso auto-organizado (no aleatorio). Supertrama= grupo de slots en 60 segundos and y contiene 4500 slots (equivalente a 75 slots por segundo). Cada grupo de slots de 1 segundo está alineado con un segundo UTC. Update rate: configurable (entre 1 mensaje por minuto y 1 mensaje por segundo). ORGANIZACIÓN. Si el canal tiene mucho tráfico, será difícil encontrar un slot. La cobertura varía dependiendo del tráfico existente. Una aeronave que desea transmitir busca un slot vacío lo lo toma de la aeronave más lejana. TIPOS DE MENSAJES Y FRECUENCIA DE TRANSMISIÓN. Variable dependiendo del espacio aéreo y/o fase de vuelo. Escenario típico: En ruta: cada 10 s. TMA cada 5 s. En la superficie cada 1.5 s. ESTADO. SARPs validadas y publicadas (aceptadas por el AMCP/7 para su recomendación a la ANC para su adopción en Abril de 2000; vigilancia ADS-B y ADS-C). MOPS evolucionando: EUROCAE. Draft ETSI European Norm for ground stations. Ensayos realizados con diversos equipos. Utilizado en numerosos proyectos de validación operacional de la ADS-B (NEAN, NUP, MEDUP...). VALIDACIÓN DE LA INFORMACIÓN. Las señales transmitidas están muy ligadas a un slot particular. Distancia estimada a partir del tiempo de llegada de la señal recibida y del retardo desde el comienzo del slot. UAT: Universal Access Transceiver. Es un enlace de datos de banda ancha, diseñado para trabajar en una única frecuencia, tanto para emisión como para recepción. Sistema con algunas características similares al extended squitter y otras similares al VDLm4. El sistema fue desarrollado en Estados Unidos (MITRE) y actualmente se encuentra en fase de pruebas bajo el Programa Capstone, emplazado en la zona de Alaska. Transmisiones en TDMA y aleatorias. Permite aplicaciones TIS-B y FIS-B. BANDA ANCHA. Frecuencia a determinar: Alaska: 966 MHz (tests)981 MHz (operacional). 978 MHz (recomendación MOPS). Dificultad de conseguir una frecuencia a nivel internacional (banda DME: 960-1215 MHz). Coordinación entre las distintas aeronaves (compartición de la frecuencia entre todas las aeronaves). El acceso al medio se basa en una división del tiempo más aleatorio. Update rate: posición+velocidad+tiempo una vez por segundo. 144 o 272 bits por mensaje ADS-B. TRAMA/SLOTS. Parte del tiempo se dedica a transmisiones de las aeronaves (acceso aleatorio) y parte a transmisiones de estaciones terrestres (TDMA). Trama: comienza con el comienzo de un segundo UTC. VALIDACIÓN DE LA INFORMACIÓN. La aeronave: Los mensajes ADS-B incluyen el tiempo de transmisión (MSO). El receptor puede realizar una verificación de la distancia (comparación con la información en el informe). Tierra: Múltiples estaciones permiten estimar la posición midiendo los tiempos de llegada. Tiempo de slot y posición de la estación indicada en el encabezado de cada mensaje. Permite a la aeronave calcular una estimación independiente de la posición. Se necesita una fuente de tiempos precisa en tierra. ESTADO. Prototipo desarrollado por MITRE en EEUU. Vuelos de prueba en Julio de 1999. Proyecto Capstone. UAT para aviación general. 150 aeronaves equipadas con UAT. En la actualidad se están desarrollando las MOPS. En la ANConf OACI abre posibilidad de nuevas tecnologías. Posibilidad de uso de enlaces satélite para ADS-B. Existen ya otras tecnologías: JTIDS/MIDS (Link 16) usado por militares. COMPARATIVA. Necesidad de seleccionar una (o varias tecnologías). Nuevas tecnologías que aún son posibles: Una única tecnología puede no ser suficiente. Implantaciones iniciales pueden ser diferentes. En áreas donde se requiera un alto update rate y para coberturas reducidas: extended squitter. En áreas donde se requiera un moderado update rate y para coberturas amplia: VDLm4. El UAT parece que, por el gran ancho de banda que utiliza, puede soportar un mayor número de aplicaciones ADS-B, pero es difícil conseguir una frecuencia, no está aún estandarizado. SELECCIÓN DE LA TECNOLOGÍA. Diferentes tecnologías: diferentes prestaciones. Las prestaciones necesarias dependen de las aplicaciones ADS-B que queramos implementar. Ninguna de las tres tecnologías es perfecta (todas tienen debilidades). Aspectos “políticos” detrás de cada tecnología. Diferentes tecnologías NO interoperables. Interoperabilidad requiere misma tecnología. Decisión de la FAA: Squitter extendido para aviación comercial: Sencillez para implantarlo a bordo. UAT para aviación general. Decisión de EUROCONTROL: Squitter extendido como link inicial. Sencillez para implantarlo a bordo. Asegura interoperabilidad con US. VDL modo 4 como posible segundo link .
 0
0
Anuncio
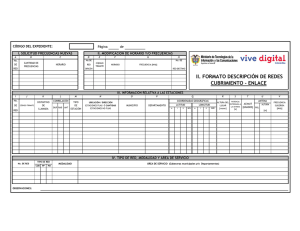

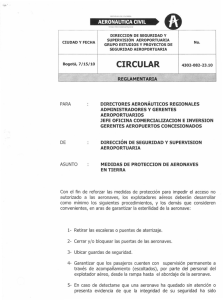
Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados