Campos variables en el tiempo
Anuncio

Campos variables en el tiempo
A. J. Zozaya
Índice
Índice 1
1. Ley de inducción de Faraday
1
1.1. Conductor que se mueve en un campo magnético, 2. —1.2. Caso general de la inducción,
3. —1.3. Forma diferencial de la ley de inducción de Faraday, 5.
2. Corriente de desplazamiento de Maxwell
6
2.1. Ecuaciones de Maxwell, 7. —2.2. Potenciales retardados, 7.
3. Revisión del concepto de energía magnética
Referencias 11
Bibliografía 11
Índice alfabético
1.
8
12
Ley de inducción de Faraday
En los materiales con una conductividad distinta de
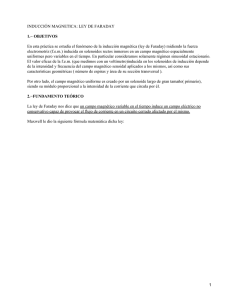
cero, se inducen corrientes de conducción si se «sumerB = B(t )
gen» en un campo magnético variable en el tiempo. Con
relación a la figura 1, Faraday (alrededor de 1831) observó que al variar el campo de inducción magnética B
i (t )
se engendraba una corriente en la espira conductora. En
particular, tomando como referencia las direcciones del Figura 1: Espira conductora en presencampo B y la corriente I indicadas en la figura 1, se cia de un campo magnético variable en
observa que al incrementarse B la corriente decrece, y el tiempo.
viceversa, al disminuir B la corriente aumenta. El establecimiento de esta corriente se atribuye a la «inducción» de una fuerza capaz de realizar
trabajo sobre los portadores de carga del medio conductor. El trabajo por unidad de carga
que realiza esta fuerza, que bien pudiera llamarse trabajo, se denomina fuerza electro-motriz,
abreviadamente f.e.m., y se define como sigue:
f.e.m. =
I
E · d`
(1)
En la Ecuación (1) se asume que un campo de naturaleza eléctrica, E, es responsable de este
trabajo. Ciertamente, tal campo eléctrico no es de naturaleza conservativa.
1
La relación cuantitativa establecida experimentalmente por Faraday entre la variación
temporal del campo magnético B y la «fuerza electro-motriz» tiene la siguiente forma:
I
E · d` = −
Cesp
|
{z
f.e.m.
d B
Φ
dt Sesp
}
f.e.m. = −
d Z
B · ds
dt Sesp
(2)
La Ecuación (2) debe leerse de la siguiente manera: dado un campo magnético B, variable
en el tiempo, y prefijado un cierto camino cerrado en la región de existencia del campo
magnético, imaginario o real, que bien pudiera ser una espira conductora Cesp , sobre tal
camino se induce un campo eléctrico capaz de realizar un trabajo por unidad de carga, a lo
largo del circuito, par al flujo de la razón de cambio temporal del campo magnético a través
de una cualquiera de las superficies definidas por el camino mismo. La relación espacial entre
los campos inducido –E– e inductor –∂B/∂t– es de mutua ortogonalidad. El signo menos en
la Ec. (2) se conoce como Ley de Lenz. La ley de Lenz establece que la f.e.m. que se induce
en la espira por la acción del flujo magnético primario, o exterior, es tal que la corriente
engendrada produce un flujo magnético secundario contrario al flujo magnético primario,
produciendo un flujo resultante menor [1].
1.1.
Conductor que se mueve en un campo magnético
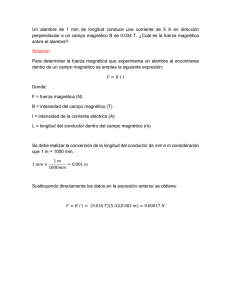
Si un conductor se mueve con velocidad ν en una región en la que existe un campo
magnético B t-invariante y uniforme (ver Fig. 2), todos los portadores de carga dentro del
conductor experimentan una fuerza dada por:
F = q(ν × B)
(3)
La Ecuación (3) forma parte
de una expresión de la fuerza aún
más general, denominada fuerza
de Lorentz, la cual tiene en cuenta la acción de los campos tanto
eléctrico como magnético:
F = q(E + ν × B)
(4)
La componente magnética de la
Fuerza de Lorentz por unidad de Figura 2: Inducción por movimiento. Cierta barra conductora se desplaza a velocidad ν sobre un par de rieles, conductores también, en
carga:
una región en la que existe cierto campo B uniforme . Todos los
F
portadores de carga en la barra experimentan una fuerza por unidad
=ν ×B
q
de carga dada por ν × B. Solo los electrones podrán moverse dando
se puede considerar, desde el punto lugar a una corriente I que queda limitada por la resistencia R en
serie con el circuito.
de vista de la propia carga, como una suerte de campo eléctrico: E = ν × B, de modo que
2
para un circuito en el que una o más de sus partes, o todo él, presentan un movimiento
relativo respecto de un campo magnético exterior, se puede definir una trabajo por unidad
de carga, o f.e.m., no nulo, dado por:
I
Γ
I
F
·d` = (ν × B) · d`
q
Γ
|{z}
I E
E · d` =
| Γ {z
(ν × B) · d`
Γ
f.e.m.
1.2.
I
}
Caso general de la inducción
I
Muy corrientemente se suele separar la f.e.m.
inducida por la variación temporal del campo magnético de la inducida por el movimiento relativo del
circuito, denominando f.e.m de transformación la
primera, y f.e.m de generador, o de movimiento, la
segunda [2]:
B
−e
ν
−e
−e
I
E · d` =
−
Z
SΓ
Γ
|
∂B
· ds
∂t
{z
}
+
f.e.m. de transformación
(a) Por traslación del circuito
B
Polo
norte
(ν × B) · d`
|Γ
{z
}
f.e.m. de generador
(5)
También se suelen englobar ambas f.e.m. en una
única ecuación
d Z
B · ds
E · d` = −
dt SΓ
Γ
Polo
sur
ω
I
I
I
(b) Por rotación del circuito
(6)
donde queda sobrentendido que el flujo SΓ B · ds
puede variar en el tiempo porque el campo magnéFigura 3: Mecanismos de inducción de la f.e.m. tico sea t−variante: B = B(t), o el circuito se dede generador o de movimiento.
forme –Fig. 2–, se traslade –Fig. 3(a)–, o rote –Fig.
3(b)–, en el tiempo: SΓ = SΓ (t), o ambas cosas.
Para comprobar el caracter general de la Ec. (6)
procederemos como sigue partiendo de la forma compacta
R
f.e.m. = −
dΦ
dt
donde Φ = SΓ B · ds, siendo SΓ una cualquiera de las superficies definidas por el circuito
Γ en el que se desea determinar la f.e.m., pudiendo ocurrir que tanto el campo magnético
B = B(t), como la superficie SΓ = SΓ (t) varíen con el tiempo.
Se tiene
R
"
#
Z
dΦ
1 Z
= lı́m
B(t + ∆t) · ds −
B(t) · ds
∆t→0 ∆t
dt
SΓ (t+∆t)
SΓ (t)
3
(7)
Figura 4: Circuito que cambia por deformación, traslación o rotación. En t el circuito es de la forma Γ(t) y tiene
asociada una familia de superficies abiertas SΓ (t). En t + ∆t el circuito es de la forma Γ(t + ∆t) y tiene asociada
una familia de superficies abiertas SΓ (t + ∆t). En el intervalo ∆t el circuito «barre» una superficie S`at . Un
diferencial de superficie sobre S`at tendrá la forma de ds = d` × νt si sus dos lados se toman paralelos a Γ y a
la velocidad ν, respectivamente, como se indica.
donde SΓ (t) y SΓ (t + ∆t) son las superficies definidas por el mismo circuito en los instantes
t y t + ∆t, respectivamente, las cuales pueden ser, en general, distintas (ver Fig. 4).
Si en el intervalo ∆t el circuito ha cambiado, por deformación, traslación o rotación, las
superficies SΓ (t) y SΓ (t + ∆t) en conjunto con una superficie que denotaremos S`at , la cual se
puede pensar como el área barrida por la deformación, traslación o rotación del circuito en
el intervalo ∆t, conforman una superficie cerrada S = SΓ (t) + SΓ (t + ∆t) + S`at . Ahora bien,
si el campo magnético varía continuamente y con suavidad se podrá expandir de la forma:
∆t + T.O.S., y al despreciar los términos de orden superior, la Ec.
B(t + ∆t) = B(t) + ∂B(t)
∂t
(7) asume la forma
#
"
Z
Z
∂B(t)
1 Z
dΦ
B(t) · ds +
B(t) · ds
= lı́m
∆t · ds −
dt ∆t→0 ∆t SΓ (t+∆t)
∂t
SΓ (t+∆t)
SΓ (t)
tomando en cuenta que V (SΓ ) ∇·B(t) dν =
y que ∇ · B = 0, resulta
R
R
SΓ (t+∆t)
B(t)·ds−
R
SΓ (t)
B(t)·ds+
R
S`at
(8)
B(t)·ds`at
!
Z
dΦ
1 Z
∂B(t)
−
B(t) · ds
= lı́m
+
· ds ∆t
| {z`at}
∆t→0 ∆t
dt
∂t
S`at
SΓ (t+∆t)
(9)
d`×νdt
En la Ecuación (9) el diferencial de superficie sobre S`at tendrá la forma ds`at = d` × νt
si sus dos lados se toman paralelos a Γ y a la velocidad ν, respectivamente,
como
se muestra
R
H
R
en la Fig. 4, y la integral de superficie se podrá expresar de la forma S`at = Γ(t) 0∆t :
!
Z
dΦ
1 I Z ∆t
∂B(t)
= lı́m
−
B(t) · d` × νdt +
· ds ∆t
∆t→0 ∆t
dt
∂t
Γ(t) 0
SΓ (t+∆t)
"
!
!
#
I
Z
1
∂B(t)
= lı́m
−
B(t) · d` × ν ∆t +
· ds ∆t
∆t→0 ∆t
∂t
Γ(t)
SΓ (t+∆t)
I
Z
∂B(t)
=−
B(t) · d` × ν +
· ds
∂t
Γ(t)
SΓ (t)
4
(10)
Usando la propiedad A · B × C = B · C × A, se obtiene finalmente:
f.e.m. = −
1.3.
Z
dΦ I
∂B(t)
=
· ds
ν × B(t) · d` −
dt
∂t
Γ(t)
SΓ (t)
(11)
Forma diferencial de la ley de inducción de Faraday
Al tomar el límite SΓ → 0, de modo de reducir la superficie SΓ y su contorno Γ a un
punto (macroscópico), y usando el Teorema de Stoke, la Ec. (6) da lugar a:
d Z
lı́m E · d` = lı́m −
B · ds
SΓ →0
Γ→0 Γ
dt SΓ
Z
d Z
lı́m
B · ds
∇ × E · ds = lı́m −
SΓ →0 SΓ
SΓ →0
dt SΓ
Z
d Z
∇ × E · ds = −
B · ds
dt
I
SΓ →0
SΓ →0
y en la medida que la superficie SΓ se contrae, las cantidades subintegrales ∇×E y B, siendo
funciones de buen comportamiento, tienden a comportarse como cantidades constantes en
los puntos de SΓ , pudiéndose factorizar de sus respectivas integrales:
Z
SΓ →0
d Z
∇ × E · ds = −
dt
∇×E·
B · ds
SΓ →0
Z
SΓ →0
∂B Z
ds = −
·
∂t
ds
SΓ →0
∇×E = −
∂B
∂t
(12)
La Ecuación (12) se conoce como Ley de Inducción de Faraday en forma diferencial o
puntual. El campo eléctrico definido mediante la Ec. (12) es un campo de naturaleza solenoidal, o sea un campo no conservativo, de líneas cerradas. Con la Ec. (12) se completa el
conocimiento del campo eléctrico. Se reconoce así, que el campo eléctrico posee dos componentes: una componente irrotacional, o estática, E i , y una componente solenoidal, o dinámica,
E s : E = E i + E s , donde los campos E i y E s quedan definidos de la siguiente manera:
∇ × Ei = 0
ρν
∇ · Ei =
ε0
∇ × Es = −
∂B
∂t
∇ · Es = 0
Normalmente, sin embargo, se describe el campo eléctrico de la siguiente manera concisa:
∂B
∇×E = −
∂t
ρν
∇·E =
ε0
5
(13)
(14)
o equivalentemente (en el mundo macroscópico):
∇×E = −
∂B
∂t
(15)
∇ · D = ρν
(16)
donde se debe distinguir la naturaleza distinta de las densidades volumétricas de cargas que
aparecen en las Ecs. (14) y (16): la primera incluye todo tipo de cargas (libres y ligadas), la
segunda incluye solo las cargas libres.
2.
Corriente de desplazamiento de Maxwell
En el Cuadro 1 se muestra el conjunto de leyes experimentales conocidas para la época de
Maxwell escritas usando la notación moderna que debemos principalmente a Heaviside
y Gibbs.
Cuadro 1: Resumen del conocimiento acumulado hasta la época de Maxwell.
Formas diferenciales
o puntuales
Ley de inducción
de Faraday
Ley de Gauss
Ley circuital
de Ampere
∇ × E = − ∂B
∂t
Formas integrales o
globales
H
Γ
E · d` = − dtd
∇ · D = ρν
H
∇×H =J
H
∇·B =0
Ecuaciones constitutivas
Ecuación de continuidad
de la corriente
S(Γ)
D · ds =
R
H · d` =
R
S
Γ
R
H
S
V (S)
S(Γ)
B · ds
ρν dν
J · ds
B · ds = 0
D = εE, B = µH,
J = σE
ν
∇ · J = − ∂ρ
∂t
H
S
J · ds = − dtd
R
V (S)
ρν dν
Maxwell observó la incosistencia existente entre las ecuaciones de la ley de Ampere y
de continuidad de la corriente: al tomar la divergencia de la primera se llega a un resultado
ν
incoherente con la segunda: ∇·(∇×H) = 0 = ∇·J , pero, a su vez: ∇·J = − ∂ρ
. Maxwell
∂t
debió corregir la Ley de Ampere añadiendo algo al segundo miembro: ∇ × H = J + algo,
de tal suerte que al tomar la divergencia de esta ecuación resultase ∇ · J = −∇ · algo.
Al comparar este resultado con la ecuación de continuidad de la corriente tendría que ser
ν
∇ · algo = − ∂ρ
. Facilmente se puede deducir, usando la Ley de Gauss (∇ · D = ρν ) que
∂t
6
algo =
∂D
∂t
y:
∂D
∂t
se denomina densidad de corriente de desplazamiento.
∇×H =J +
donde el nuevo término
2.1.
∂D
∂t
(17)
Ecuaciones de Maxwell
Maxwell concibió la densidad de corriente de desplazamiento por la vía del pensamiento,
y no experimentalmente, y al hacerlo estaba postulando la teoría más completa de la Física:
la Teoría Electromagnética. El conjunto de ecuaciones:
∇×E = −
∂B
∂t
(18)
∇ · D = ρν
(19)
∂D
∇×H = J +
∂t
∇·B = 0
(20)
(21)
se conocen como las Ecuaciones de Maxwell. Tales ecuaciones son ecuaciones del punto
o diferenciales y permiten explicar todos los fenómenos electromagnéticos macroscópicos de
la naturaleza. Las Ecuaciones de Maxwell contienen el concepto de acción contigua, en
contraposición con la acción a distancia, pues correlacionan la razón de variación espacial con
la razón de cambio por unidad de tiempo de los campos, lo cual implica que la evolución de
éstos no puede sino ocurrir mediante pequeños (infinitesimales) pasos espaciales y temporales.
2.2.
Potenciales retardados
J (r‘)
µ
0
De la Ecuación (21) se desprende que B = ∇ × A, solo que A(r, t) 6= 4π
V 0 R dν .
El vector potencial magnético ahora será función del tiempo y su valor en un punto dado
será función de la distribución de corriente en un instante de tiempo anterior, el necesario
para que el efecto de J (r 0 ) ( o sea A) mediante una «acción contigua» se manifieste en el
punto de observación r. Un expresión apropiada para A, tomando en cuenta este retardo, y
asumiendo que la perturbación A «viaja» de un punto a otro a una velocidad νp es
R
µ Z J (r 0 , t − R/νp ) 0
dν
A(r, t) =
4π V 0
R
(22)
Otra consecuencia de las Ecuaciones de Maxwell es que E 6= −∇V , ya que ∇ × E 6= 0.
Sin embargo al sustituir en la Ec. (18) B = ∇ × A:
∂B
∂t
∂
= − ∇×A
∂t
∇×E = −
7
intercambiando los operadores
∂
∂t
←→ ∇×
∂A
∇×E = ∇× −
∂t
!
∂A
∇× E+
= 0
∂t
!
de donde
E+
∂A
= −∇V
∂t
|{z}
−ES
|
{z
Ei
}
∂A
E = −∇V
−
| {z }
∂t}
| {z
Ei
Es
y Ei = −∇V son las componentes solenoidal, o «dinámica», e irrotacional,
donde Es = − ∂A
∂t
o cuasiestática, del campo eléctrico, respectivamente.
ρν (r‘)
1 R
Ciertamente el potencial V = V (r, t) 6= 4πε
dν 0 y su causa –ρν (r 0 , t)– no suceden
V0
R
simultáneamente: primero sucede la causa y luego sucede el efecto, de modo que al observar
el potencial en r en un instante de tiempo t dado, la causa que lo ha engendrado ha debido
ocurrir un instante de tiempo anterior, dígase t0 = t − R/νp , donde νp es la velocidad con que
la acción de las fuentes se propaga hacia los puntos contiguos alrededor y νRp es el tiempo que
tarda en ir del punto fuente r 0 al punto de observación r:
V (r, t) =
1 Z ρν (r 0 , t − R/νp ) 0
dν
4πε V 0
R
(23)
Las funciones de las Ecs. (22) y (23) se conocen como los Potenciales Retardados.
3.
Revisión del concepto de energía magnética
En el capítulo previo definimos la densidad de energía magnética para medios lineales
mediante la fórmula wm = 21 H · B y advertimos que su deducción no podía ser posible
hasta haber completado el estudio de la Ley de Inducción de Faraday, tema que finalmente
hemos tratado. Procederemos de seguido a deducir esta expresión usando como referencia un
cuerpo conductor de la forma que se indica en la Fig. 5 el cual se conecta electricamente por
los extremos 1 y 2 con un generador que forzará «suavemente» una corriente constante I,
partiendo de un valor nulo.
En t = 0 el generador empezará a inyectar cargas por uno de los extremos y las evacuará
por el otro, de tal manera de realizar un trabajo dw = ∆V dq sobre la carga diferencial dq,
siendo ∆V la difrencia de potencial entre los extremos 1 y 2 del conductor. Este diferencial
de carga se incorporará
a la corriente i que empezará a circular a través de la sección ∆S1 del
R
conductor: i = ∆S1 J · ds. Recordemos que hemos asumido que la corriente será inicialmente
nula y por tanto la misma será una función del tiempo i = i(t), y que la haremos variar
8
Figura 5: Cuerpo conductor sobre el que se forzará una corriente I DC de manera suave, y que servirá de base
para la deducción de la expresión wm = 12 H · B.
muy lentamente, o suavemente, hasta alcanzar un valor constante I. Anticiparemos que esto
ocurrirá después de T s. Durante la evolución de i(t) se inducirá un campo Es dado por
, donde A vendría dado por la Ec. (22). Si se asume que la evolución temporal
Es = − ∂A
∂t
de J sea suficientemente lenta,
dígase cuasiestática, se podrán despreciar los retardos y
J (r 0 ,t)
µ R
dν 0 , donde VC es el volumen del conductor. En este
aproximar A como A = 4π
VC
R
punto es necesario precisar un poco mejor el caracter suave de la evolución temporal de la
corriente. Cuando exigimos una variación lenta de la corriente lo hacemos porque deseamos
parta de un valor nulo (cuando la corriente alcance el valor
que la derivada temporal ∂A
∂t
constante I, la misma derivada será igualmente nula). Cabe preguntarse el porqué de esta
premisa tan restrictiva y particular. La respuesta es que no deseamos malgastar la energía
del generador en las variaciones del momento de las cargas ni en radiación, sino utilizarla
toda solo en la creación del campo magnético de I.
Volviendo a la expresión dw = ∆V dq, admitiremos que este trabajo debe hacerse para
vencer la f.e.m. inducida contraria, y su valor mínimo, despreciando las pérdidas óhmicas en
el conductor, vale
Z
2
∆V dq = −
1
Es dq · d`
(24)
y como dq = i(t)dt
Z
J (t) · dsan dt
dq =
∆S
Reemplazando la Ec. (25) en la Ec. (24) se obtiene
dw = −
Z 2
1
Z
Es
∆S
J (t) · dsan dt · d`
9
(25)
tomando d` y an colineales con E (y por ende con J ), siendo E = − ∂A
, de modo que las
∂t
R2 R
R
integrales anidadas 1 y ∆s equivalgan a la integral sobre el volumen VC del conductor VC ,
el trabajo diferencial realizado se podrá escribir como
!
Z
dw =
VC
∂A
· J dv dt
∂t
De esta manera
dw Z ∂A
=
· J dv
dt
VC ∂t
representa la rapidez con que la fuente externa al conductor crea el campo magnético, o
la rapidez con que la fuente transfiere su energía al campo magnético. Cuando la corriente
alcance su valor estable, lo cual ocurrirá, según lo anticipamos, a los T segundos, el campo
magnético creado albergará una energía par a
Wm =
Ahora bien, como
Z T
Z
VC
0
y como
R
VC
∂A
∂t
∂
(A
∂t
· J) =
∂A
· J dv
∂t
· J dv =
R
VC
A·
∂A
∂t
Z T
VC
0
∂A
· J dv
∂t
·J +A·
!
∂J
∂t
Z
dt =
Z
∂J
∂t
A·J
VC
!
dt
(26)
se podrá escribir
T
dv −
Z T
0
0
∂J
A·
dv
∂t
VC
Z
!
dt
dv, lo cual comprobaremos más adelante, sigue que
T
1Z
Wm =
A · J dv 2 VC
0
y si
VC A · J dv = 0, entonces
R
0
1Z
Wm =
A · J dv
2 VC
(27)
representa la energía magnética almacenada en la distribución de corriente y utilizada para
crear el campo magnético correspondiente.
Ahora bien, expandiendo el volumen de integración de la Ec. (27) hasta incorporar todo
el espacio, remplazando J por ∇ × H, utilizando la identidad vectorial ∇ · (A × H) =
H · ∇ × A − A · ∇ × H, y sustituyendo ∇ × A por B se obtiene
Wm =
1Z
H · B dv
2 V∞
(28)
porque al convertir la integral de volumen de ∇ · (A × H) en la integral de flujo de A × H a
través de la superficie cerrada en el infinito, ésta se desvanece, toda vez que el vector A × H
decrece con el inverso del cubo de la distancia (A × H ∝ r13 ), mientras que la superficie
crece con el cuadrado (ds ∝ r2 ).
La cantidad 12 H ·B tiene dimensiones (Julios/m3 ) de una densidad volumétrica de energía,
y se la denomina densidad volumétrica de energía magnética:
1
wm = H · B
2
10
(29)
Comprobación
Se desea comprobar que
Z
∂A
∂J
· J dv =
dv
A·
∂t
VC ∂t
VC
Para ello partiremos poniendo J = ∇ × H
Z
(30)
∂A
∂A
= ∇×H ·
∂t
∂t
∂J
∂H
A·
= A·∇×
∂t
∂t
J·
y usando la identidad vectorial ∇ · (A × B) = B · ∇ × A − A · ∇ × B
!
∂A
∂A
∂B
= ∇· H ×
+H ·
∇×H ·
∂t
∂t
∂t
!
∂H
∂H
∂H
= ∇· A×
+
·B
A·∇×
∂t
∂t
∂t
Al sustituir estas expresiones en la Ec. (30) y al expandir el volumen de integración desde
VC hasta incluir todos los puntos del universo, y al usar
el teorema
para
de la Divergencia
∂H
convertir las integrales de volumen de los términos ∇· H × ∂A
y
∇·
A
×
en
integrales
∂t
∂t
de flujo a través de la superficie en el infinito que encierra el universo, resulta
Z
∂B
∂A
· J dv =
dv
H·
∂t
V∞
V∞ ∂t
Z
Z
∂J
∂H
A·
dv =
· B dv
∂t
V∞
V∞ ∂t
Z
· ds y
ya que A ∝ 1r , H ∝ r12 y ds ∝ r2 las integrales S∞ H × ∂A
∂t
Si el medio es lineal y no posee memoria será
H
Z
H·
V∞
H
S∞
· ds son nulas.
A × ∂H
∂t
Z
∂H
∂B
dv =
· B dv
∂t
V∞ ∂t
y por lo tanto
Z
VC
Z
∂A
∂J
· J dv =
A·
dv
∂t
∂t
VC
Bibliografía
[1] N. N. Fiódorov. Fundamentos de electrodinámica. MIR, Moscú, URSS, 1982.
[2] William H. Hayt. Teoría electromagnetica. McGraw-Hill, Mexico, 1991.
11
Índice alfabético
Corriente de desplazamiento de Maxwell, 6
densidad de corriente de desplazamiento, 7
densidad de energía magnética, 10
Ecuaciones de Maxwell, 7
energía magnética, 10
f.e.m. de generador, 3
f.e.m. de movimiento, 3
f.e.m. de transformación, 3
fuerza de Lorentz, 2
fuerza electro-motriz, 1
Ley de inducción de Faraday, 1
ley de inducción de Faraday, 1, 5
Ley de Inducción de Faraday en forma diferencial, 5
Ley de Inducción de Faraday en forma puntual, 5
Ley de Lenz, 2
Potenciales Retardados, 8
Potenciales retardados, 7
12