1.13. Círculo de Mohr para deformaciones
Anuncio

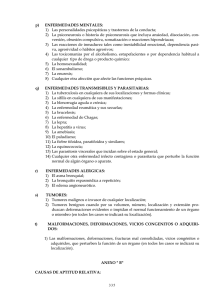
1.13 Círculo de Mohr para deformaciones 1.13. Círculo de Mohr para deformaciones Construcción del círculo de Mohr para deformaciones: 1. Dibujo de un sistema de ejes coordenados con como abscisa, positivo hacia la derecha, y como ordenada, positivo hacia abajo. 2. Localice el centro del círculo en el punto con coordenadas y = 0. = + 2 3. Localice el punto A que representa las condiciones de deformación sobre la cara 1 del elemento mostrado en la Fig. (1.50), marcando sus coordenadas = y . Note que el punto corresponde a = 0 . 4. Localice el punto B que representa las condiciones de deformación sobre la cara del elemento mostrado en la Fig. (1.50) , trazando sus coordenadas = y − . Observe que el punto sobre el círculo corresponde a = 90 . 5. Dibuje una línea del punto al . Esta línea es un diámetro del círculo y pasa por el centro . Los puntos y , que representan las deformaciones sobre los planos a 90 uno del otro, que están en extremos opuestos del diámetro y, por lo tanto, están a 180 uno del otro sobre el círculo. 6. Con el punto como centro, trace el círculo de Mohr por los puntos y . El círculo dibujado de esta manera tiene radio . = sµ − 2 ¶2 + 2 7. Cálculo de las deformaciones principales y ubicación en la fig. (1.50) ε12 = ± 8. Cálculo del ángulo de la ec. (1.65) 2 = tan µ 2 − 9. Cálculo del la deformación cortante máxima, c °Gelacio Juárez, UAM ¶ máx , y del ángulo . 67 1.13 Círculo de Mohr para deformaciones Figura 1.50: Trazo círculo de Mohr para deformaciones. máx = Nota: En el círculo de Mohr para deformaciones, algunos autores, utilizan la deformación angular, 2, en lugar de la deformación por cortante , que están relacionadas como: = 1.13.1. 2 (1.115) Ejemplo En un punto de la superficie plana de un sólido se colocan tres deformímetros extensométricos como se muestra en la Fig. 1.51.Después de someter el sólido a la acción de cargas se registran las siguientes deformaciones unitarias: = 0006; = 0004; y = −0008; (1.116) Figura 1.51: Arreglo de deformímetros. c °Gelacio Juárez, UAM 68 1.13 Círculo de Mohr para deformaciones Calcular la deformación angular definida por el ángulo recto de los deformímetros a y b, las deformaciones y sus direcciones principales , así como la deformación cortante máxima. Calculo de la deformación angular Al expresar los ejes cartesianos (,), como los ejes definidos, respectivamente, por los deformímetros a y b, las deformaciones se definen como: = = 0006 = = 0004 (1.117) = = −0008 = 12 Expresando la deformación como la proyección de las otras deformaciones. = n · ε · n (1.118) donde el vector normal es: n= " cos(90◦ + ) cos # (1.119) y el tensor de deformaciones: ε= " # (1.120) sustituyendo las ecs. (1.119) y (1.120) en la ec. (1.118) = h cos(90◦ + ) cos 2 ◦ i " 2 # cos(90◦ + ) cos ◦ = cos (90 + ) + cos + 2 cos(90 + ) cos (1.121) sustituyendo los valores de la ec. (1.117) en la (1.121) −0008 = 0006 cos2 (135◦ ) + 0004 cos2 (45◦ ) + 2 cos(135◦ ) cos(45◦ ) obteniéndose el valor de la deformación por cortante; = 0013 La deformación angular, , se calcula de la ec. (1.115): = 2 = 0026 c °Gelacio Juárez, UAM (1.122) 69 1.13 Círculo de Mohr para deformaciones Calculo de deformaciones principales El tensor de deformaciones es: ε= " 0006 0013 0013 0004 # Cálculo del centro = 0006 + 0004 = 0005 2 Cálculo del radio = sµ 0006 − 0004 2 ¶2 + (0013)2 = 001304 Cálculo de las deformaciones principales y ubicación en la fig. (1.52) 1 = 0005 + 0013 = 0018 2 = 0005 − 0013 = −0008 Figura 1.52: Trazo Mohr. El ángulo se calcula 1 = tan−1 2 La deformación cortante máxima, µ 2(0013) 0006 − 0004 máx , máx ¶ = 4280◦ corresponde al radio del círculo: = = 0013 el ángulo es: c °Gelacio Juárez, UAM 70 1.13 Círculo de Mohr para deformaciones = 22◦ Las deformaciones principales y por cortante máximo se muestran en la fig. 1.53. Figura 1.53: Deformaciones principales y cortantes máximas. 1.13.2. Ejemplo Una roseta con deformímetros espaciados un ángulo , mostrada en la Fig. 1.54a, se adhiere a una superficie libre de un sólido. Bajo la deformación del sólido, las deformaciones lineales medidas por los deformímetros a, b y c son, respectivamente, , y . 1) Derive la ecuaciones para determinar las componentes de deformación en términos de , y en función de las deformaciones medidas , y . 2) Determine los resultados del inciso 1 para rosetas Rectangulares, = 45◦ ,Fig. 1.55a ,y Delta , = 60◦ , Fig. 1.55b. Figura 1.54: Deformaciones principales y cortantes máximas. 1) Los vectores normales con los cosenos directores, Fig. 1.54b, son: n = " 1 0 # ; n = " cos sin # ; n = " cos 2 sin 2 # ; La proyección del tensor de deformaciones sobre una dirección dada por un vector normal se c °Gelacio Juárez, UAM 71 1.13 Círculo de Mohr para deformaciones Figura 1.55: Rosetas tipo: a) Rectangulares y b) Delta. determina como: = n · ε · n Por lo que la proyección del tensor de deformaciones sobre las direcciones a, b y c son: = n ·ε · n = = n ·ε · n = cos2 + sin2 + 2 cos sin (1.123) = n ·ε · n = cos2 2 + sin2 2 + 2 cos 2 sin 2 La ecuación anterior puede escribirse como: ⎡ ⎤ ⎡ 1 0 0 ⎤⎡ ⎤ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎢ ⎥ = ⎢ cos2 sin2 ⎥ ⎢ ⎥ cos sin ⎦ ⎣ ⎦ ⎣ ⎦⎣ cos2 2 sin2 2 cos 2 sin 2 (1.124) Resolviendo el sistema anteior para , y , se tiene: = ( − 2 ) sin 4 + 2 sin 2 = 2 ¢ ¡ ¢ ¡ 42 sin 2 sin 2 2 2 sin cos 2 − sin 2 cos2 + 2 sin2 2 − sin2 = 4 sin2 sin 2 (1.125) 1) Para el caso de Rosetas tipo Rectangular , = 45◦ , se tienen las siguientes relaciones cos = √ √ 1 2, sin = 1 2, cos 2 = 0 y sin 2 = 1, que sustituyéndolas en la ec. (1.125) se tiene: c °Gelacio Juárez, UAM 72 1.13 Círculo de Mohr para deformaciones = = (1.126) = − 1 ( + ) 2 2) Para el caso de Rosetas tipo Delta , = 60◦ , se tienen las siguientes relaciones cos = 12, √ √ sin = 32, cos 2 = +12 y sin 2 = 32, que sustituyéndolas en la ec. (1.125) se tiene: = 2 ( + ) − = 3 − √ = 3 1.13.3. (1.127) Ejemplo El desplazamiento en un sólido está dado por el siguiente vector: ⎡ ⎡ ⎤ ⎤ ⎥ ⎢ ⎥ −3 ⎢ ⎥ ⎢ ⎥ u=⎢ ⎣ ⎦ = ⎣ √ + 2 ⎦ 10 4 2 + 3 1) Determine el tensor de deformación y 2) las deformaciones y respectivas direcciones principales. Las componentes del vector de deformación se calculan con las siguientes derivadas: = = = = 1 · 10−3 = 1 · 10−3 = 3 · 10−3 El tensor de deformación es: ⎡ ³ ´ = 12 + = 0 ¡ ¢ −3 √4 = 12 + ´= 2 · 10 ³ −3 = 12 + = 1 · 10 1 ⎢ ε=⎢ ⎣ 0 √4 2 0 1 1 √4 2 ⎤ ⎥ −3 1 ⎥ ⎦ 10 3 Las deformaciones principales, mostradas en la Fig. 1.56b, tiene las siguientes magnitudes: 1 = 5 · 10−3 , 2 = 1 · 10−3 , 3 = −1 · 10−3 Las direcciones principales, mostradas en la Fig. 1.56b, correspondientes a cada deformación principal son: c °Gelacio Juárez, UAM 73 1.13 Círculo de Mohr para deformaciones ⎡ 0551 ⎤ ⎡ −0333 ⎤ ⎡ −0765 ⎤ ⎥ 2 ⎢ ⎥ 3 ⎢ ⎥ ⎢ ⎥ ⎥ ⎥ ⎢ ⎢ v1 = ⎢ ⎣ 0195 ⎦ ; v = ⎣ 0943 ⎦ ; v = ⎣ −0270 ⎦ ; 0811 0 0585 Figura 1.56: Representación de valores principales: a) direcciones y b) deformaciones. 1.13.4. Tarea 1) De las ecs. (1.126) y (1.127) determine las expresiones de deformaciones y direcciones principales para rosetas Rectangulares y tipo delta en función de , y 12 + ± = 2 sµ 2 = tan µ − 2 2 − ¶2 + 2 ¶ 2) En una Roseta rectangular se obtuvieron las siguientes deformaciones: = 552 · 10−4 ; = 1286 · 10−4 ; y = 1301 · 10−4 ; (1.128) Determine: a) las deformaciones , y . b) las deformaciones 1 , 2 y máx . c) direcciones principales. c °Gelacio Juárez, UAM 74