Descripción Externa de Sistemas Dinámicos II
Anuncio

Introducción a la
Teoría de Sistemas
Grupo de Inteligencia
Artificial y Sistemas
Departamento de Informática y Sistemas
Universidad de Las Palmas de Gran Canaria
Práctica: Descripción Externa
de los Sistemas Dinámicos (Sistema
de Control de Nivel y Caudal)
Junio, 1.999
Sumario
1. Enunciado. 1
2. Análisis del Sistema y Modelo Lineal 3
3. Análisis del comportamiento en función de Vr(t) y β(t)
4. Listado MATLAB Orientativo
11
13
5. Análisis Comparativo entre los Modelos Lineal y No lineal. 15
6. Diagramas SIMULINK Orientativos.
16
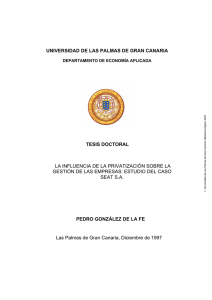
1. Enunciado.
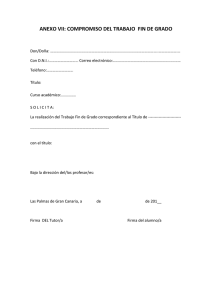
En el sistema de la figura 1. se dispone de un controlador de nivel (L.C.) y un controlador de flujo
(F.C.) para regular el nivel de agua en el depósito cilíndrico con base de área A (A=1 m2)
El controlador de nivel compara la respuesta del medidor de nivel (L.T.): Vh(t)= 5h(t) , con una tensión
de referencia: Vr(t). Su salida se combina con la del medidor de flujo (F.T.): Vq(t)= 1'56qs2(t) en el
controlador de flujo, cuya respuesta actúa sobre la válvula de entrada de agua al tanque, la función de
transferencia de esta válvula es:
α ( s)
0.2
=
V ( s ) 1 + 25s
Siendo α(t) la abertura de la válvula. El caudal de entrada resultante es: qe(t)= 4 α(t) en l/s. El caudal
de salida podemos asumirlo en la forma:
q s (t ) = K β (t ) h(t )
V
Vr
qe
+
1.25
Vn
1
-
LT
h(t)
Vh (t)
+
L.C.
0.016
Vq
+
F.C.
ß
FT
q
Figura 1.
Práctica: Descripción Externa de los Sistemas Dinámicos
Universidad de Las Palmas de Gran Canaria
Grupo de Inteligencia Artificial y Sistemas
1
s
Donde se incluye una aproximación del área de la sección de apertura de la válvula, β(t), la velocidad
de salida del líquido y una constante K que dependerá de la geometría de la válvula (que tomaremos
K=4 en nuestro caso). Para los controladores de nivel (L.C.) y de Caudal (F.C.) de la figura se cumplen:
V n (t ) = 1.25(V r (t ) − V h (t ) )
V (t ) = V n (t ) + 0.016V q (t )
Si definimos un punto de equilibrio del sistema en Vro=7v. y ßo=0.5. se desea:
a) Obtener un modelo lineal en términos de descripción externa (matriz de transferencia) del sistema
para el punto de equilibrio anterior.
b) Estudiar para variaciones en Vr(t) y β(t) el comportamiento del mismo, mediante los comandos ft,
lsim y ltview de MATLAB
c) Evaluar analíticamente la salida h(t) si se abre la válvula de salida, esto es, si β pasa de 0.5 a 0.6.
d) Comparar con Simulink los modelos Lineal y No-lineal.
Práctica: Descripción Externa de los Sistemas Dinámicos
Universidad de Las Palmas de Gran Canaria
Grupo de Inteligencia Artificial y Sistemas
2
2. Análisis del Sistema y Modelo Lineal
En nuestro caso, las ecuaciones que definen al sistema serán:
(1) Caudal de entrada:
q e (t ) = 4α (t )
(2) Ecuación diferencial derivada de la función de transferencia de la válvula neumática de
entrada:
dα (t )
α (t ) + 25
= 0.2V (t )
dt
(3) Caudal de salida:
q s (t ) = K β (t ) h(t )
(4) Medidor de nivel (L.T.)
V h (t ) = 5h(t )
(5) Controlador de nivel (L.C.)
V n (t ) = 1.25(V r (t ) − V h (t ) )
(6) Medidor de flujo (F.T.):
Vq (t ) = 1.56q s (t )
2
(7) Controlador de flujo (F.C.):
V (t ) = V n (t ) + 0.016V q (t )
(8) Ecuación de continuidad en el tanque:
q e (t ) − q s (t ) = A
dh(t )
dt
A continuación procederemos a evaluar las distintas variables en el punto de equilibrio, asumiendo que
las derivadas nulas en las ecuaciones (2) y (8), nos resultan:
Práctica: Descripción Externa de los Sistemas Dinámicos
Universidad de Las Palmas de Gran Canaria
Grupo de Inteligencia Artificial y Sistemas
3
q eo = 4α o
α o = 0.2Vo
q so = K βo
V no
ho
Vho = 5ho
= 1.25(V ro − V ho )
V qo = 1.56q so
2
Vo = Vno + 0.016V qo
q eo − q so = 0
Con Vro=7v. y ßo=0.5, y utilizando las ecuaciones anteriores, queda:
(0.00624 K
2
[
]
− 6.25) ho + 17.5(0.00624 K 2 − 6.25) − 0.3906 K 2 ho + 76.56 = 0
2
2
Que, particularizando para K=4, obtenemos la siguiente ecuación:
37.82ho − 113.87ho + 76.56 = 0
2
De donde nos resultan dos soluciones de equilibrio:
h01 = 1.99716 ≈ 2m.; h02 = 1.0135 ≈ 1m.
Para la segunda solución, nos resultan los siguientes valores en el equilibrio:
ho = 1 m; Vo = 2.5v.; Vho = 5v.;
q eo = q so = 2 l s ; Vqo = 6.24v. ;Vno = 2.484v.
Para obtener un modelo lineal en torno a este punto de equilibrio, linealizamos las ecuaciones (3) y (6)
como sigue:
Ω(q s , β , h s ) = q s − K β h = 0
Ψ (Vq , q s ) = Vq − 1.56q s = 0
2
Para pequeñas variaciones alrededor del punto definido anteriormente tendremos:
∂Ω
∂Ω
∂Ω
β (t ) +
q s (t ) +
h(t ) = 0
∂q s o
∂β o
∂h o
∂Ψ
∂Ψ
q s (t ) +
V q (t ) = 0
∂q s o
∂V q o
Esto es, las correspondientes ecuaciones linealizadas serán:
Práctica: Descripción Externa de los Sistemas Dinámicos
Universidad de Las Palmas de Gran Canaria
Grupo de Inteligencia Artificial y Sistemas
4
q s (t ) = k1 β (t ) + k 2 h (t );
k 1 = K ho y k 2 =
0.5K
2 ho
Vq (t ) = k 3 q s (t ); k 3 = 3.12q so
Para el valor de K=4, las ecuaciones (3) y (6) linealizadas son:
q s (t ) = 4 β (t ) + h(t );
Vq (t ) = 6.24q s (t )
Pasando las ecuaciones linealizadas al campo transformado, nos resulta el siguiente conjunto de
ecuaciones:
(1) Caudal de entrada:
Qe ( s ) = 4α ( s )
(2) Ecuación diferencial derivada de la función de transferencia de la válvula neumática de
entrada:
α ( s )(1 + 25s ) = 0.2V ( s )
(3) Caudal de salida:
Q s ( s ) = 4 β ( s ) + H ( s );
(4) Medidor de nivel (L.T.)
V h ( s ) = 5H ( s )
(5) Controlador de nivel (L.C.)
V n ( s ) = 1.25(V r ( s ) − Vh ( s ) )
(6) Medidor de flujo (F.T.):
Vq ( s ) = 6.24Q s ( s )
(7) Controlador de flujo (F.C.):
V ( s ) = V n ( s ) + 0.016V q ( s )
Práctica: Descripción Externa de los Sistemas Dinámicos
Universidad de Las Palmas de Gran Canaria
Grupo de Inteligencia Artificial y Sistemas
5
(8) Ecuación de continuidad en el tanque:
Q e ( s ) − Q s ( s ) = As H ( s )
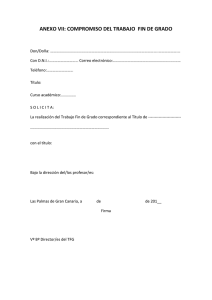
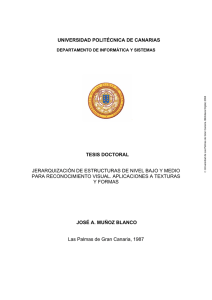
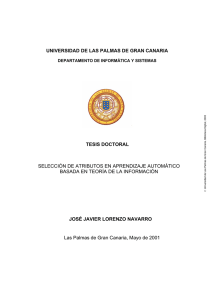
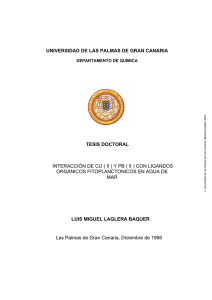
El diagrama de bloques y el correspondiente diagrama de flujo de señal se muestran en las figuras 2 y 3.
La fórmula de Mason en este caso es:
h
H ( s)
=
β (s)
∑T
k =1
k
∆k
∆
ß(S)
K
1
+
K3
+
Qs(s)
Vq(s)
K
0.016
Vr(s)
+
b
Vn(s)
1.25
-
+
+
0.2
α(s)
Qe(s)
4
V(s) 1+25s
-
+
a
1
s
2
H(s)
5
Vh(s)
Figura 2. Diagrama de Bloques
Los trayectos directos son:
T1 (β , q s , a, h ) = k1 (−1)
1
s
0 . 0128 k 1 k 3
0 .8
1
T 2 (β , q s , V s , q e , a , h ) = k 1 0 . 016 k 3
=
1 + 25 s s
(1 + 25 s )s
Los bucles son:
Práctica: Descripción Externa de los Sistemas Dinámicos
Universidad de Las Palmas de Gran Canaria
Grupo de Inteligencia Artificial y Sistemas
6
B1 (h, q s , a, h ) = k 2 (−1)
1
s
0.8 1 0.0128k 2 k 3
=
(1 + 25s )s
1 + 25s s
0.8 1
−5
=
B3 (h, b, V n , V , q e , a, h ) = (− 5)1.25
1 + 25s s (1 + 25s )s
B2 (h, q s , V s , q e , a, h ) = k 2 0.016k 3
Y además:
∆ = 1 − (B1 + B2 + B3 );∆1 = 1;∆ 2 = 1
Con lo que:
h
H (s)
=
β (s)
∑T ∆
k =1
k
k
∆
=
− (3.68 + 100 s )
25s 2 + 26 s + 5.92
De forma similar calculamos la función de transferencia:
h
H (s)
=
Vr ( s )
∑T ∆
k =1
k
k
∆
Cuyo único trayecto directo es:
0.8 1
1
T1 (Vr , b, V n , V , q e , a, h ) = 1.25
=
1 + 25s s (1 + 25s )s
Resultando:
h
H (s)
=
Vr ( s )
∑T ∆
k =1
k
∆
k
=
1
25s + 26s + 5.92
2
Práctica: Descripción Externa de los Sistemas Dinámicos
Universidad de Las Palmas de Gran Canaria
Grupo de Inteligencia Artificial y Sistemas
7
Vr
1
1
1.25
V
0.8
1+25s
1
a
b
1
s
qe
Vn
0.016
Vq
-1
K2
K
-5
3
ß
h
q s
K1
Figura 3.
A continuación se realiza un análisis comparativo de las respuestas del modelo lineal para evaluar la
bondad del análisis. en este caso:
H ( s) = M ( s) U ( s) =
[M
rh
( s) M β h (s)
]
Vr ( s )
β ( s)
con:
M ( s) =
[M
rh
]
1
( s) M β h ( s) =
2
25s + 26 s + 5.92
− (3.68 + 100 s )
25s 2 + 26 s + 5.92
Este modelo se refleja en el diagrama SIMULINK siguiente:
Práctica: Descripción Externa de los Sistemas Dinámicos
Universidad de Las Palmas de Gran Canaria
Grupo de Inteligencia Artificial y Sistemas
8
-100s-3.68
Hbft
25s2+26s+5.92
To Workspace3
Transfer Fcn
B
Sum1
To Workspace1
0.5
Bo
B(t)
B(t)
h(t)
H
Vr(t)
Sum
Vr(t)
Control Tanque
To Workspace
1
ho
7
Vro
Vr
Sum2
1
25s2+26s+5.92
Transfer Fcn1
To Workspace2
Hrft
To Workspace4
FFF
Figura 4.
Práctica: Descripción Externa de los Sistemas Dinámicos
Universidad de Las Palmas de Gran Canaria
Grupo de Inteligencia Artificial y Sistemas
9
B(t)
Gain
1
4
Sum
6.24
0.016
1
0.8
2
1.25
Vr(t)
Sum1
25s+1
Sum2
Transfer Fcn
Sum3
1
s
Integrator
h(t)
5
Figura 5.
Práctica: Descripción Externa de los Sistemas Dinámicos
Universidad de Las Palmas de Gran Canaria
Grupo de Inteligencia Artificial y Sistemas
10
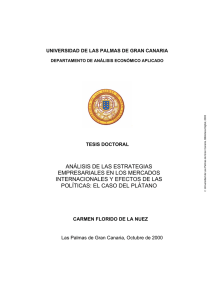
3. Análisis del comportamiento en función de Vr(t) y β(t)
Si deseamos estudiar las variaciones en h(t) debido a cambios en β(t) en forma de escalón de ∆β
unidades operaremos como sigue:
H ( s) =
− (3.68 + 100 s ) ∆β ∆β 258.43
242.88
15.54
=
−
−
2
25 s + 0.7033 s + 0.3366
s
25s + 26 s + 5.92 s
Si evaluamos la transformada inversa de Laplace, la expresión temporal correspondiente es:
h(t ) =
[
∆β
258.43e − 0.703t − 242.88e − 0.336t − 15.54
25
]
Análogamente:
H ( s) =
∆Vr ∆Vr 3.8778
1
0.3468
4.2247
=
+
+
25 s + 0.7033 s + 0.3366
s
25s + 26s + 5.92 s
2
h(t ) =
[
∆Vr
3.877e −0.703t + 0.346e −0.336t + 4.224
25
]
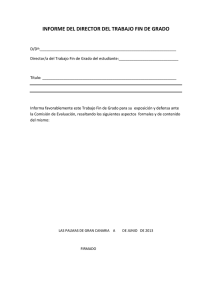
Es decir, una variación positiva en la sección β(t) produce un aumento del caudal de salida y por tanto
la altura h(t) del depósito disminuirá en consonancia. En análogo camino, una alteración en la tensión
de referencia provoca un incremento en la tensión de salida del controlador de nivel. Este aumento se
propaga hasta la válvula que regula el caudal de entrada, en donde un aumento de tensión conlleva una
apertura de la válvula. De esta forma el caudal entrante crecerá, haciendo lo propio la altura del agua
del tanque según la ley descrita.
Práctica: Descripción Externa de los Sistemas Dinámicos
Universidad de Las Palmas de Gran Canaria
Grupo de Inteligencia Artificial y Sistemas
11
variació n de h(t) para B(t) de 0.5 uds a 0.6 uds
1
0.95
0.9
0.85
0.8
0.75
0.7
0.65
0
5
10
15
20
25
30
Figura 6.
Práctica: Descripción Externa de los Sistemas Dinámicos
Universidad de Las Palmas de Gran Canaria
Grupo de Inteligencia Artificial y Sistemas
12
4. Listado MATLAB Orientativo
clear;
nums={[1] ; [-100 -3.68]};
dens={[25 26 5.92] ; [25 26 5.92]};
Sys=tf(nums, dens);
SysTanque=Sys.';
set(SysTanque,'inputn',
{'Vr(t)'
depósito h(t)' );
SysTanque
t=[0:0.01:29.99];
Bo=0.5;
Vro=7;
deltaB=0.1*ones(size(t));
deltaVr=ones(size(t));
U=[0.0*deltaVr ; 1.0*deltaB];
U=U.';
[H, ts]=lsim(SysTanque, U, t);
plot(t,H);
ltiview
'B(t)'},
'outputn','nivel
Step Response
From: B(t)
0
To: nivel depósito h(t)
Amplitude
-0.5
-1
-1.5
-2
-2.5
-3
0
3
6
9
12
15
Time (sec.)
Práctica: Descripción Externa de los Sistemas Dinámicos
Universidad de Las Palmas de Gran Canaria
Grupo de Inteligencia Artificial y Sistemas
13
Step Response
From: Vr(t)
0.16
0.14
Amplitude
To: nivel depósito h(t)
0.12
0.1
0.08
0.06
0.04
0.02
0
0
3
6
9
12
15
18
Time (sec.)
Práctica: Descripción Externa de los Sistemas Dinámicos
Universidad de Las Palmas de Gran Canaria
Grupo de Inteligencia Artificial y Sistemas
14
5. Análisis Comparativo entre los Modelos Lineal y No lineal.
sistemas lineal y no lineal para Vr(t) de 7 a 8 uds.
1.2
1.18
1.16
1.14
1.12
1.1
1.08
1.06
1.04
1.02
1
0
5
10
15
20
25
30
35
40
35
40
sistemas lineal y no lineal para B(t) de 0.5 a 0.6 uds.
1
0.95
0.9
0.85
0.8
0.75
0.7
0.65
0
5
10
15
20
25
30
Práctica: Descripción Externa de los Sistemas Dinámicos
Universidad de Las Palmas de Gran Canaria
Grupo de Inteligencia Artificial y Sistemas
15
6. Diagramas SIMULINK Orientativos.
-100s-3.68
25s2+26s+5.92
Transfer Fcn
B
Sum1
To Workspace1
0.5
Bo
B(t)
B(t)
h(t)
Vr(t)
Vr(t)
Hnlineal
To Workspace
Control Tanque No-lineal
1
Hlineal
ho
To Workspace4
Sum
7
Vro
Vr
Sum2
To Workspace2
1
25s2+26s+5.92
Transfer Fcn1
Práctica: Descripción Externa de los Sistemas Dinámicos
Universidad de Las Palmas de Gran Canaria
Grupo de Inteligencia Artificial y Sistemas
16
B(t)
Gain
Product
1
4
Product1
1.56
0.016
2
sqrt(u)
1
1
s
Integrator1
1
s
Integrator
0.8/
1.25
Vr(t)
Sum1
Sum2
1
Sum4
Sum3
1
h(t)
-K-
5
Práctica: Descripción Externa de los Sistemas Dinámicos
Universidad de Las Palmas de Gran Canaria
Grupo de Inteligencia Artificial y Sistemas
Fcn
17