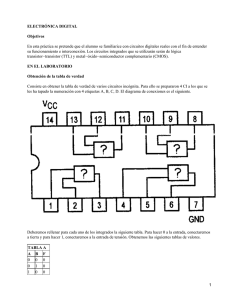
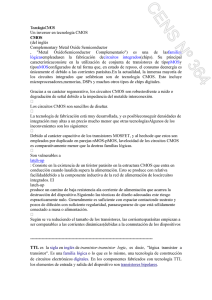
Series de dispositivos CMOS Familia lógica transistor
Anuncio

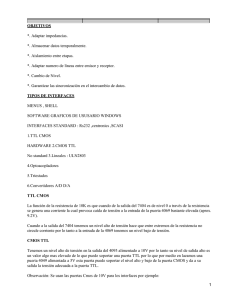
Series de dispositivos CMOS ! Serie 4000: – La primera serie CMOS – Bajo consumo pero muy lentos – No compatible con TTL ! ! ! ! ! 74HC : CMOS de alta velocidad 74HCT: CMOS de alta velocidad comp. TTL 74AC: CMOS avanzado Hoja de 74ACT: CMOS avanzado comp. TTL datos 74AHC: CMOS avanzado de alta velocidad Luis Tarazona, UNEXPO Barquisimeto EL-3213 – Circuitos Digitales I - 2004 129 Familia lógica transistor-transistor (TTL) ! Utiliza transistores multiemisor a la entrada en lugar de los diodos utilizados en DTL ! Es una familia lógica saturada ! Su compuerta básica es la NAND ! La serie TTL estándar 74xx ahora es obsoleta. Existen otras series que dan mejor rendimiento en cuanto a relación velocidadpotencia Luis Tarazona, UNEXPO Barquisimeto EL-3213 – Circuitos Digitales I - 2004 130 Compuerta NAND TTL estándar SN7400 Hoja de datos Luis Tarazona, UNEXPO Barquisimeto EL-3213 – Circuitos Digitales I - 2004 131 Características Eléctricas de la familia TTL VCC = +5 V R1 20 kΩ R2 8 kΩ R5 120 Ω D1X Q3 X Q4 D1Y Y VA D2X D2Y Q2 D3 D4 R6 4 kΩ Z R3 12 kΩ Q5 R4 1.5 kΩ R7 3 kΩ Q6 DiodeAND ANDdegate Compuerta diodos and inputde protection y protección entradas Divisor fase Phasede splitter © 2000 by Prentice Hall, Inc. Luis Tarazona, UNEXPOCopyright Barquisimeto Digital Design Principles and Practices, 3/e Etapa destage salida Output EL-3213 – Circuitos Digitales I - 2004 132 TTL: Salida en estado bajo VCC = +5 V R5A 120 Ω R2A 8 kΩ R1B 20 kΩ D1XB ≤ 0.35 V Q3A (OFF) R2B 8 kΩ Q4A (OFF) D1YB Q2A (ON) D3A D4A Q2B (OFF) R6A 4 kΩ 2V D2XB D2YB R3B 12 kΩ Q5A (ON) R7A 3 kΩ R4A 1.5 kΩ R4B 1.5 kΩ Q6A (ON) Luis Tarazona, UNEXPO Barquisimeto EL-3213 – Circuitos Digitales I - 2004 133 Copyright © 2000 by Prentice Hall, Inc. Digital Design Principles and Practices, 3/e TTL: Salida en estado alto VCC = +5 V R5A 120 Ω R2A 8 kΩ Q3A (ON) R1B 20 kΩ R2B 8 kΩ D1XB 2.7 V Q4A (ON) D1YB Q2A (OFF) D3A D4A Q2B (ON) R6A 4 kΩ 2V D2XB D2YB R3B 12 kΩ Q5A (OFF) R4A 1.5 kΩ Ileak R7A 3 kΩ R4B 1.5 kΩ Q6A (OFF) Luis Tarazona, UNEXPO Barquisimeto EL-3213 – Circuitos Digitales I - 2004 Copyright © 2000 by Prentice Hall, Inc. Digital Design Principles and Practices, 3/e 134 Series de dispositivos TTL ! ! ! ! ! ! 74 74H 74S 74LS 74AS 74ALS ! 74F : TTL estándar : TTL de alta velocidad (High speed) : TTL Schottky : TTL Schottky de baja potencia : TTL Schottky avanzado : TTL Schottky avanzado de baja potencia : TTL Fast (similar a la AS) Luis Tarazona, UNEXPO Barquisimeto EL-3213 – Circuitos Digitales I - 2004 135 Características de la familia TTL parámetro unidad 74 tp ns 9 Pd mW 10 P.V pJ 90 VILmax V 0.8 VOLmax V 0.4 VIHmin V 2.0 VOHmin V 2.4 IILmax mA -1.6 IOLmax mA 16 IIHmax 40 µA IOHmax -400 µA 74L 33 1 33 0.7 0.4 2.0 2.4 -0.18 3.6 10 -200 74H 6 22 132 0.8 0.4 2.0 2.4 -2.0 20 50 -500 74S 3 20 60 0.8 0.5 2.0 2.7 -2.0 20 50 -1000 74LS 9 2 18 0.8 0.5 2.0 2.7 -0.4 8 20 -400 74AS 1.6 20 32 0.8 0.5 2.0 2.7 -2.0 20 200 -2000 74ALS 5 1.3 6.5 0.8 0.5 2.0 2.7 -0.2 8 20 -400 Pd = Consumo de potencia por compuerta, P.V = producto de potencia-velocidad Luis Tarazona, UNEXPO Barquisimeto EL-3213 – Circuitos Digitales I - 2004 136 Niveles Lógicos TTL y Márgenes de ruido ! Asimétricos, a diferencia de CMOS VCC = 5 V HIGH ABNORMAL LOW 0 VOHmin = 2.7 V VIHmin = 2.0 V High-state DC noise margin VILmax = 0.8 V VOLmax = 0.5 V Low-state DC noise margin Copyright © 2000 by Prentice Hall, Inc. ! CMOS puede compatible con TTL Digital Design Principles fabricarse and Practices, 3/e – Familias lógicas CMOS “T” Luis Tarazona, UNEXPO Barquisimeto EL-3213 – Circuitos Digitales I - 2004 137 Niveles CMOS vs. TTL Niveles TTL Niveles CMOS VCC V =5V VCC OHmin HIGH VOHmin IHmin High-state DC noise HIGH margin ABNORMAL VIHmin High-state DC noise margin ABNORMAL VILmax VCC V .7 CC .7 VCC .3 VCC .3 VCC HIGH LOW LOW VILmax VOLmax V OLmax 0 0 0 Copyright © 2000 by Prentice Hall, Inc. Copyright © Principles 2000 by Prentice Hall, Inc.3/e Digital Design and Practices, CMOS con niveles TTL -- HCT, FCT, VHCT, etc. Digital Design Principles and Practices, 3/e Luis Tarazona, UNEXPO Barquisimeto ABNORMAL Low-state Low-state LOW margin DC DC noise noise margin VOHmin = 2.7 VIHmin = 2.0 V VILmax = 0.8 V VOLmax = 0.5 Copyright © 2000 by Prentice Hall, Inc. Digital Design Principles and Practices, 3/e EL-3213 – Circuitos Digitales I - 2004 138 Diferencias de TTL respecto a CMOS ! Características de entrada y de salida asimétricas. ! Las entradas entregan una corriente significativa en estado BAJO y en estado ALTO sólo una corriente de fuga. ! La salida puede manejar mucha más corriente en el estado BAJO (transistor saturado). ! La salida sólo puede entregar una cantidad limitada de corriente en el estado ALTO (resistencia mas transistor parcialmente encendido. ! TTL tiene dificultad para manejar entradas CMOS “puras” porque VOH = 2.4 V (excepto “T” CMOS). Luis Tarazona, UNEXPO Barquisimeto EL-3213 – Circuitos Digitales I - 2004 139 Interconexión entre TTL y CMOS ! Deben considerarse varios factores: – Niveles lógicos y fuentes de alimentación – Margen de ruido – Cargabilidad de salida (FAN-OUT) – Carga capacitiva Luis Tarazona, UNEXPO Barquisimeto EL-3213 – Circuitos Digitales I - 2004 140 CMOS manejando TTL ! Las corrientes de entrada en BAJO son el prncipal problema ! La alta corriente que necesita TTL incrementa la caida de tensión a la salida, lo que reduce el margen de ruido ! A veces se requiere utilizar buffers CMOS para realizar la conexion Luis Tarazona, UNEXPO Barquisimeto EL-3213 – Circuitos Digitales I - 2004 141 TTL manejando CMOS ! ! ! ! ! La corriente no es problema CMOS requiere muy poca corriente de entrada Niveles lógicos de salida TTL: En BAJO, no hay problemas En ALTO, el nivel no es compatible con CMOS – Se debe usar un resistor externo para elevar la salida TTL a niveles CMOS (pull-up resistor) – Es recomendable el uso de compuertas TTLde colector abierto Luis Tarazona, UNEXPO Barquisimeto EL-3213 – Circuitos Digitales I - 2004 142 Resumen Niveles Lógicos TTL y CMOS VOHmin, VOLmax 5.0 HC, HCT 3.84 AC, ACT 3.76 LS, S, ALS, AS 2.7 VIHmin, VILmax 3.5 CMOS 4000 LS, S, ALS, AS 2.0 HC, HCT, AC, ACT 1.5 CMOS 4000 0.8 LS, S, ALS, AS 0.5 AC, ACT 0.37 HC, HCT 0.33 Luis Tarazona, UNEXPO Barquisimeto LS, S, ALS, AS HC, HCT, AC, ACT 0 EL-3213 – Circuitos Digitales I - 2004 143 Comparación de niveles de conmutación Luis Tarazona, UNEXPO Barquisimeto EL-3213 – Circuitos Digitales I - 2004 144 Ciclo de vida de las tecnologías HC BCT ALS TI - sourced F AS AC Bipolar CMOS BiCMOS FCT ABT LS other S LVT LV LVC ALVC CD4000 TTL AHC ALB Introduction Growth Luis Tarazona, UNEXPO Barquisimeto Maturity Decline Obsolescence EL-3213 – Circuitos Digitales I - 2004 145 Posibilidades de migración Luis Tarazona, UNEXPO Barquisimeto EL-3213 – Circuitos Digitales I - 2004 146 Carga en AC ! La carga en AC se ha convertido en un factor crítico de diseño a medida que la industria se ha desplazado a sistemas CMOS. – Las entradasCMOS tienen una alta impedancia, luego la carga DC no es significativa. – Las entradas CMOS, sus encapsulados y conexiones relacionadas tienen una capacitancia significativa. – El tiempo para cargar y descargar tal capacitancia es un componente importante del retardo. Luis Tarazona, UNEXPO Barquisimeto EL-3213 – Circuitos Digitales I - 2004 147 Retardos de propagación (1) ! Recordar: – los dispositivos electrónicos no responden instantáneamente a los cambios que se producen en sus entradas • Debido a las capacitancias parásitas en las uniones p-n y en los conductores – Las compuertas están constituidas por conexiones de elementos semiconductores Luis Tarazona, UNEXPO Barquisimeto EL-3213 – Circuitos Digitales I - 2004 148 Retardos de propagación (2) ! Un recorrido de señal es el camino eléctrico de una señal desde una entrada particular a una salida particular en un elemento lógico ! El retardo de propagación tp de un recorrido de señal, es la cantidad de tiempo necesaria para que un cambio en la señal de entrada produzca un cambio en la salida. Luis Tarazona, UNEXPO Barquisimeto EL-3213 – Circuitos Digitales I - 2004 149 Retardos de propagación (3) ! tpHL es el tiempo entre un cambio en la entrada y el correspondiente cambio a la salida cuando la salida está, cambiando de ALTO a BAJO ! tpLH es el tiempo entre un cambio en la entrada y el correspondiente cambio a la salida cuando la salida está, cambiando de BAJO a ALTO Luis Tarazona, UNEXPO Barquisimeto EL-3213 – Circuitos Digitales I - 2004 150 Retardos de propagación (4) Luis Tarazona, UNEXPO Barquisimeto EL-3213 – Circuitos Digitales I - 2004 151 Retardos de propagación (5) ENTRADA SALIDA 90% 90% tpd(LH) tpd(HL) VOH-VOL 10% 10% t Retardo de propagación: tpd tf tr Tiempo de transición: tr (tiempo de elevación) o tf (tiempo de caída) Cambio de voltaje: VOH - VOL Slew rate: Luis Tarazona, UNEXPO Barquisimeto dv = dt (VOH - VOL) x 80% tr (or tf) EL-3213 – Circuitos Digitales I - 2004 152 Riesgos Temporizados (Hazards) ! El comportamiento transitorio de los circuitos digitales puede diferir de lo que se espera en el diseño debido a los retardos de propagación en compuertas y conectores. ! La salida de un circuito puede producir un pulso de corta duración cuando se supone que debe mantenerse en cierto nivel lógico. A esto se le conoce como falla ! Se dice que existe un riesgo si el circuito tiene la posibilidad de generar una falla Luis Tarazona, UNEXPO Barquisimeto EL-3213 – Circuitos Digitales I - 2004 153 Riesgos estáticos ! Un riesgo estático 1 es la posibilidad de que una salida de un circuito produzca una falla de 0 cuando se espera que la salida permanezca en 1 en estado estacionario ! Un riesgo estático 0 es la posibilidad de que una salida de un circuito produzca una falla de 1 cuando se espera que la salida permanezca en 0 en estado estacionario. (Leer definición formal en el libro de texto) Luis Tarazona, UNEXPO Barquisimeto EL-3213 – Circuitos Digitales I - 2004 154 Riesgos estáticos - Ejemplo ! Diseñar un circuito que cumpla con la siguiente función: F = ∑ X ,Y , Z (3,4,6,7) Data 8 Seq 7 6 5 4 3 CP1 2 CP2 1 F X Y Z Luis Tarazona, UNEXPO Barquisimeto EL-3213 – Circuitos Digitales I - 2004 155 Riesgos dinámicos ! Un riesgo dinámico es la posibilidad de que una salida cambie más de una vez como resultado de una sola transición de entrada. Esto puede ocurrir si hay múltiples rutas con diferentes retardos desde la entrada cambiante hasta la salida. TP1 0V CP1Q1 CP2Q2 0V TP2 5V Luis Tarazona, UNEXPO Barquisimeto EL-3213 – Circuitos Digitales I - 2004 156 Eliminación de riesgos estáticos ! No es sencillo para un circuito arbitrario, pero a los circuitos de dos niveles se les puede eliminar los riesgos estáticos agregando términos redundantes de consenso a la expresión simplificada. Esto se puede realizar co ayuda del mapa de Karnaugh. ! Un circuito AND-OR (NAND-NAND) de dos niveles no tiene riesgos dinámicos o estáticos 0. ! Un circuito OR-AND (NOR-NOR) de dos niveles no tiene riesgos dinámicos o estáticos 1. ! Al eliminarse los riesgos estáticos se garantiza que no existirán riesgos dinámicos Luis Tarazona, UNEXPO Barquisimeto EL-3213 – Circuitos Digitales I - 2004 157