“TURBINAS EOLICAS APLICADAS A LA GENERACION ELECTRICA”
Anuncio

UNIVERSIDAD VERACRUZANA
FACULTAD DE INGENIERIA MECANICA-ELECTRICA
ZONA POZARICA-TUXPAN
“TURBINAS EOLICAS APLICADAS A
LA GENERACION ELECTRICA”
TESINA
AA
QUE PARA ACREDITAR LA E.E.E.R. DE LA
CARRERA DE
INGENIERO MECANICO-ELECTRISISTA
PRESENTAN:
GOMEZ FLORES ALFONSO DE JESUS
ROCHA RIVERA JOSE ALLAN
DIRECTOR:
ING. VALENCIA GUTIERREZ CESAR
IGNACIO
POZA RICA DE HGO., VER.
2014
1
2
INDICE
INTRODUCCION ........................................................................................................................................ 7
CAPITULO I ............................................................................................................................................... 8
JUSTIFICACIÓN ..................................................................................................................................... 8
NATURALEZA, SENTIDO Y ALCANCE DEL TRABAJO .............................................................................. 9
ENUNCIACIÓN DEL TEMA. .................................................................................................................. 10
EXPLICACIÓN DE LA ESTRUCTURA DEL TRABAJO ............................................................................... 11
CAPITULO II ............................................................................................................................................ 12
DESARROLLO DEL TEMA ..................................................................................................................... 12
PLANTEAMIENTO DEL TEMA DE LA INVESTIGACION ..................................................................... 12
MARCO CONTEXTUAL ........................................................................................................................ 13
MARCO TEORICO .................................................................................................................................... 16
1.0 Turbinas Eólicas - Diseño Y Componentes ....................................................................................... 16
1.1 Rotor................................................................................................................................................. 18
1.1.1 ASPA DEL ROTOR ................................................................................................................... 22
1.1.2 EJE (Hub) ........................................................................................................................... 26
1.2 Tren de impulsión (tren de engranajes) ....................................................................................... 33
1.2.1 conceptos .............................................................................................................................. 33
1.2.2 Caja de cambios..................................................................................................................... 35
Observaciones preliminares ............................................................................................................... 35
1.2.3 Los acoplamientos y frenos ................................................................................................... 42
1.2.4 Generadores .......................................................................................................................... 44
1.3 Agregados auxiliares y otros componentes ................................................................................. 45
1.3.1 Sistema de orientación .......................................................................................................... 45
1.3.2 Calefacción y refrigeración .................................................................................................... 48
1.3.3 Protección contra rayos ........................................................................................................ 49
1.3.4 Los dispositivos de elevación ................................................................................................ 51
1.3.5 Sensores ................................................................................................................................ 52
1.4 Torre y fundamento ..................................................................................................................... 54
1.4.1 Torre ...................................................................................................................................... 54
1.4.2 Fundación .............................................................................................................................. 60
1.5 Montaje y Producción .................................................................................................................. 62
1.6 Datos característicos de Turbinas de viento ................................................................................ 64
3
................................................................................................................................................................ 69
................................................................................................................................................................ 69
2.0 Aerodinámica de Turbinas de viento ............................................................................................... 70
2.1 Descripción General ..................................................................................................................... 70
2.2 Teoría Momentum unidimensional y el límite de Betz ................................................................ 70
2.3 Turbina de viento del eje Ideal Horizontal con rotación de despertador .......................... 75
2.4 aspas aerodinámicas y conceptos generales de Aerodinámica ................................................... 76
2.4.1 Airfoil Terminología ............................................................................................................... 76
2.4.2 Levante, Parámetros Arrastre y No-dimensionales .............................................................. 77
2.4.3 flujo sobre una superficie de sustentación ........................................................................... 80
2.4.4 Comportamiento Airfoil ........................................................................................................ 81
2.5 Diseño de la hoja de modernas turbinas de viento ..................................................................... 82
2.5.1 Entorno Operativo Cuchilla ................................................................................................... 82
2.6 predicción del rendimiento del aspa general del rotor ............................................................... 82
2.6.1 Aerogenerador Estados de Flujo ........................................................................................... 83
2.7 Forma de la hoja de Optimum Rotor con rotación de despertador ............................................ 83
2.8 procedimiento de cálculo de rendimiento desubidad HAWT Rotor ............................................ 85
2.9 efecto de arrastre y el número de hoja en unrendimiento óptimo ............................................. 87
2.10 Problemas computacionales y aerodinámicos en Aerodinámico Diseño .................................. 87
2.11 La aerodinámica de Eje Vertical Aerogeneradores .................................................................... 88
2.11.1 Descripción general ............................................................................................................. 88
2.11.2 La aerodinámica de una recta de punta Turbina de eje vertical......................................... 89
2.11.3 Aerodinámica del rotor Darrieus......................................................................................... 90
3.0 MECANICA Y DINAMICA ................................................................................................................... 92
3.1 Antecedentes ............................................................................................................................... 92
3.2 Cargas de turbinas de viento .................................................................................................. 92
3.2.1 Tipos de Cargas................................................................................................................. 92
3.2.2 Fuentes de Cargas ................................................................................................................. 94
3.2.3 Efectos de Cargas .................................................................................................................. 95
3.3 Principios generales de la mecánica ............................................................................................ 95
3.3.1 Temas seleccionados de mecánica básica ............................................................................ 95
3.3.1.1 Fuerzas de inercia............................................................................................................... 95
3.3.1.2 La fragua del voladizo Vigas ............................................................................................... 96
4
3.3.1.3 Rígido cuerpo plano de rotación ........................................................................................ 96
3.3.1.4 Movimiento giroscópico..................................................................................................... 97
3.3.2 Vibraciones ............................................................................................................................ 99
3.4 Dinámica de Rotor de Turbinas de Viento ................................................................................... 99
3.4.1 Las cargas en un rotor Ideal ................................................................................................ 100
3.4.2 Linealizado Hinge–Spring de la hoja del rotor .................................................................... 101
3.5 Métodos de Modelado Aerogenerador respuesta estructural .................................................. 105
3.5.1 Método de Elementos Finitos ............................................................................................. 106
3.5.2 Método del Parámetro Lumped.......................................................................................... 107
3.5.3 Método de Análisis Modal .................................................................................................. 107
3.5.4 Análisis multicuerpo ............................................................................................................ 108
4.0 Aspectos Eléctricos De Turbinas Eólicas......................................................................................... 109
4.1 Resumen ..................................................................................................................................... 109
4.2 Conceptos básicos de la Energía Eléctrica.................................................................................. 109
4.2.1 Fundamentos de Corriente Alterna .................................................................................... 109
4.2.2. Impedancia Complex .......................................................................................................... 110
4.3 Transformadores de Potencia .................................................................................................... 116
4.4 Máquinas Eléctricas.................................................................................................................... 119
4.4.1 Máquinas Eléctricas simples ............................................................................................... 119
4.4.2 Los campos magnéticos giratorios ...................................................................................... 120
4.4.4 Máquinas de Inducción ....................................................................................................... 123
4.4.5 Generadores de corriente continua .................................................................................... 125
4.4.6 generadores de imán permanente ..................................................................................... 125
4.4.7 Otras Máquinas Eléctricas ................................................................................................... 126
4.4.8 Generador de Diseño Mecánico .......................................................................................... 126
4.4.9 Especificación Generador .................................................................................................... 127
4.5 Transformadores de corriente ................................................................................................... 128
4.5.1 Descripción general de Transformadores de corriente ...................................................... 128
4.5.2 Rectificadores ...................................................................................................................... 128
4.5.3 Inversores ............................................................................................................................ 129
4.6 Aspectos eléctricos de velocidad variable Aerogeneradores .................................................... 131
4.6.1 velocidad Variable de operación de los generadores síncronos ......................................... 132
4.6.2 Operación de velocidad variable de generadores de inducción de jaula de ardilla ........... 132
5
4.7 Auxiliar Equipo Eléctrico............................................................................................................. 133
4.7.1 Cables eléctricos .................................................................................................................. 133
4.7.2 anillos colectores ................................................................................................................. 134
4.7.3 Arranque suave ................................................................................................................... 135
4.7.4 Contactores ......................................................................................................................... 135
4.7.5 Disyuntores Y Fusibles ......................................................................................................... 135
4.7.6 desconexión principal.......................................................................................................... 136
4.7.7 Factor de Potencia Condensadores de Corrección ............................................................. 136
4.7.8 Turbina cargas eléctricas ..................................................................................................... 136
ANALISIS CRÍTICO DE LOS DIFERENTES ENFOQUES ............................................................................. 137
CAPITULO III ......................................................................................................................................... 138
CONCLUSIÓNES .............................................................................................................................. 138
BIBLIOGRAFIA ....................................................................................................................................... 139
ANEXOS ............................................................................................................................................. 140
6
INTRODUCCION
El resurgimiento del viento como una fuente importante de la energía del mundo
debe clasificarse como uno de los acontecimientos importantes de finales del siglo
XX.
El advenimiento
del motor de vapor, seguido por la aparición de otras
tecnologías de conversión de combustibles fósiles a energía útil, al parecer han
relegado
para
siempre a
insignificante el papel del viento en la generación de
energía.
De hecho, a mediados de 1950 que
parecía ser
que
ya
había
pasado,
a finales de los sesenta, sin embargo, podían percibirse los primeros signos de
reversión y a principios de los noventa se convertía en un campo fundamental
aparente que estaba en marcha un cambio fundamental. Esa década vio un fuerte
resurgimiento en la industria de energía eólica en todo el mundo, con capacidad
instalada aumentada en cinco veces. La década de 1990 también estuvo
marcada por un cambio de turbinas eólicas de gran tamaño de mega watts, una
reducción y consolidación en la fabricación de la turbina de viento y el desarrollo
real de la energía eólica marina.
Durante el inicio del siglo XXI esta
tendencia
ha continuado,
con los
países europeos (y fabricantes) que conducen al aumento a través de las
políticas del gobierno que se centró en el desarrollo de fuentes nacionales
de energía sostenible y reducción de emisiones contaminantes.
Para entender lo que estaba sucediendo, es necesario tener en cuenta cinco factores
principales. En primer lugar, había una necesidad. Una conciencia emergente
de la es cases de combustibles fósiles y reservas así como los efectos adversos de
los
combustibles
para
la
producción
de
energía,
había
causado
la buscar alternativas. En segundo lugar, hubo el potencial eólico. el Viento existe en
todas partes en la tierra y en algunos lugares con densidad de energía considerable.
El Viento había sido ampliamente utilizado en el pasado, para potencia mecánica,
así como transporte. Sin duda, era concebible volver a utilizarlo. En tercer lugar,
hubo la capacidad tecnológica. En particular, ha habido avances
en otros campos, que, cuando se aplica para las turbinas eólicas, podría revolucionar
la
manera de ser utilizados.
Estos
tres
factores
primero
fueron
necesarios para fomentar
el resurgimiento de la
energía
eólica.
Debía
haber dos factores más, la primera de todas una visión de una nueva forma
de utilizar el viento, y en segundo lugar la voluntad política para lograrlo.
La visión comenzó mucho antes de la década de 1960 con tales individuos
como la Cour de Poul,Albert Betz, Palmer Putnam y Thomas Percy. Fue continuada
Johannes Juul, E. W. Golding, Ulrich H€ total y William Heronemus, pero pronto
se extendió a otros
7
CAPITULO I
JUSTIFICACIÓN
Por medio de este trabajo se intenta conceptualizar el tema, darlo a conocer más a
fondo y proporcionar nuevas posibilidades de generar energía que ayuden a
disminuir la contaminación ambiental aprovechando los recursos naturales, en
especial el viento, esta energía extraída del viento la llamamos energía eólica que
está relacionada con el movimiento de las masas de aire que se desplazan de áreas
de alta presión atmosférica hacia áreas adyacentes de baja presión, con velocidades
proporcionales al gradiente de presión. El ejemplo más típico de una instalación
eólica está representado por los "parques eólicos" (varios aerogeneradores
implantados en el territorio conectados a una única línea que los conecta a la red
eléctrica local o nacional).
Al principio del resurgimiento del viento, el costo de la energía de las turbinas de
viento era mucho mayores que la delos combustibles fósiles. Apoyo del gobierno
eran necesaria para llevar a cabo la investigación, desarrollo y pruebas; para
proporcionar
la
reforma regulatoria
para permitir que las
turbinas de viento
interconectaran con redes eléctricas; y ofrecer incentivos para ayudar a acelerar el
despliegue de la nueva tecnología. La voluntad política necesaria para este apoyo
aparecido en diferentes momentos y en diferentes grados, en un número de países:
primero en los Estados Unidos, Dinamarca y Alemania y ahora en gran parte
del resto del mundo.
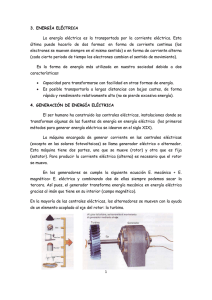
En la actualidad se utiliza, sobre todo, para mover aerogeneradores. En estos la
energía eólica mueve una hélice y mediante un sistema mecánico se hace girar el
rotor de un generador, normalmente un alternador, que produce energía eléctrica.
Para que su instalación resulte rentable, suelen agruparse en concentraciones
denominadas parques eólicos.
8
NATURALEZA, SENTIDO Y ALCANCE DEL TRABAJO
Es una investigación apoyada en la técnica documental, cuyo propósito es dar a
conocer los diferentes puntos de vista y enfoques que se proponen en el desarrollo
de las turbinas eólicas aplicadas a la generación eléctrica.
Se darán a conocer los componentes, diseños, así como la aerodinámica aplicable
para los aerogeneradores, así como las recomendaciones propias para el
mejoramiento de la vida útil del conjunto turbina eólica-generador eléctrico.
La presente tesina se circunscribe solamente a la turbina eólica, pues tratar de
alcanzar todo el conjunto aerogenerador es un trabajo extenuante, que no se
alcanzaría a tratar en este trabajo y seria una nueva propuesta para otros temas de
trabajos resepcionales.
Se enfocara a la investigación teórico practica a una zona con características
exclusivas en donde puedan ser aplicables los diseños de las turbinas eólicas.
9
ENUNCIACIÓN DEL TEMA.
La energía eólica constituye en la actualidad una fuente energética de indudable
relevancia y en constante desarrollo en el mundo. La contribución de esta fuente de
energía al logro común de reducir las emisiones de gases de efecto invernadero, la
evolución tecnológica de los aerogeneradores y la optimización de los costos de
producción e instalación, hacen en ella una evidente opción del futuro.
Este trabajo busca reforzar la líneas de Investigación de Generación de Aplicación
de Conocimientos, que lleva acabo la Facultad de Ingeniería Mecánica Eléctrica de
la Universidad Veracruzana
10
EXPLICACIÓN DE LA ESTRUCTURA DEL TRABAJO
El marco teórico de la presente tesina "turbinas eólicas aplicadas a la generación
eléctrica" se estructuro de la siguiente manera:
Como inicio del contenido se encuentra el tema "turbinas eólicas-diseño y
componentes" ya que, la primera fuente a la que debe recurrirse para obtener
información es la descripción de los componentes de las turbinas eólicas, asi como
los diversos criterios de diseño. Es posible recurrir a la información del fabricante
por medio de sus catálogos para obtener las diferentes características técnicas y de
diseño de las turbinas eólicas.
Adicionalmente a la búsqueda del diseño y componentes, se tiene la sección
"aerodinámica en aerogeneradores" en donde, se presentara la interacción entre el
rotor y el viento. Se aplicara el análisis de un volumen de control, muy conocido en
la mecánica de fluidos para lograr el correcto entendimiento entre el movimiento del
aire y el movimiento de la máquina.
A continuación se era la relación "mecánica y dinámica", en donde se analizara la
interacción de las fuerzas involucradas en las turbinas eólicas, fuerzas del ambiente
externo principalmente debidas al viento así como los movimientos de los diversos
componentes de la turbina, iteraciones que traerán como resultado no solo la
producción de la energía deseada sino también las tenciones dinámicas y estáticas
de los materiales que conforman cada uno de los diversos componentes.
Finalmente se considerara los "aspectos eléctricos de las turbinas eólicas", debido a
que la función principal de la mayoría de loas turbinas eólicas es la generación de
electricidad, se hace importante tratar en forma muy generalizada los diversos
equipos electro generadores así como la disposición adecuada del generador para
la correcta operación del sistema aerogenerador.
Después de desarrollar el marco teórico se dispondrá del análisis crítico de los
diferentes enfoques para lograr de esta manera obtener las conclusiones
pertinentes y adecuadas del tema "turbinas eólicas aplicadas a la generación
eléctrica".
11
CAPITULO II
DESARROLLO DEL TEMA
PLANTEAMIENTO DEL TEMA DE LA INVESTIGACION
Este trabajo comienza con una visión general de la tecnología, y explica cómo llegó
a tomar la forma que tiene hoy. Describe el recurso eólico y cómo se relaciona con
la producción de energía. Se analiza los principios aerodinámicos y explica cómo la
energía del viento hará que el rotor de una turbina de viento funcione. Además se
profundiza en los aspectos dinámicos y mecánicas de la turbina con más detalle, y
considera la relación del rotor con el resto de la máquina. También se proporciona
un resumen de los aspectos eléctricos de la conversión de la energía eólica, en
particular con respecto a la generación actual y la conversión de la energía eléctrica
El tema se desempeño con finalidad de tener un conocimiento mas amplio sobre el
funcionamiento detallado de los aerogeneradores, asi como su diseño y
desempeño, para poder hacer un mejor uso de estas increíbles maquinas
modernas. Este tema se desarrollo con la ayuda de blibliografia especializadas en el
tema de aerogeneradores, e incluso un estudio del aire recopilado por la Facultad
De Ingeniería Mecánica Eléctrica a lo largo de un año.
12
MARCO CONTEXTUAL
El resurgimiento de la eólica como una fuente importante de la energía del mundo
debe figurar como uno de los acontecimientos importantes de finales del siglo XX. El
advenimiento de la máquina de vapor, seguida de la aparición de otras tecnologías
para la conversión de los combustibles fósiles a la energía útil, parece haber
relegado para siempre a la insignificancia el papel de la eólica en la generación de
energía. De hecho, a mediados de la década de 1950 que parecían ser lo que ya
había sucedido. A finales de 1960, sin embargo, las primeras señales de una
reversión se podían discernir, y por la década de 1990 era cada vez más evidente
que una inversión fundamental estaba en marcha. Esa década vino un fuerte
resurgimiento de la industria de la energía eólica en todo el mundo, con una
capacidad instalada aumentar más de cinco veces. La década de 1990 también
estuvieron marcados por un cambio las turbinas de viento, grandes megavatios de
tamaño, una reducción y consolidación en la fabricación de aerogeneradores, y el
desarrollo real de la energía eólica marina (ver McGowan y Connors, 2000). Durante
el inicio del siglo XXI esta tendencia se ha mantenido, con los países europeos (y
fabricantes) que conducen al aumento a través de las políticas del gobierno se
centraron en el desarrollo de los suministros nacionales de energía sostenible y la
reducción de las emisiones contaminantes.
Para entender lo que estaba sucediendo, es necesario tener en cuenta cinco
factores principales. . En primer lugar era necesario. Una conciencia emergente de
la finitud de la tierra, las reservas de combustibles fósiles, así como de los efectos
adversos de la quema de esos combustibles, para la energía habían causado
muchas personas a buscar alternativas. En segundo lugar, estaba el potencial.
Existe en todas partes el viento sobre la tierra, y en algunos lugares con una
considerable densidad de energía. Viento había sido ampliamente utilizado en el
pasado, para la energía mecánica, así como transporte. Ciertamente, era concebible
para usarlo de nuevo. En tercer lugar, no había la capacidad tecnológica. En
particular, habido avances en otros campos, que, cuando se aplica a las turbinas
eólicas, que podrían revolucionar forma en que se podrían utilizar. Estos tres
primeros factores son necesarios para fomentar el resurgimiento de la energía
eólica, pero no suficiente. Tenía que haber dos factores más, en primer lugar la
visión de una nueva manera de utilizar el viento, y el segundo la voluntad política
para que esto ocurra. La visión comenzó mucho antes de la década de 1960 con
individuos tales como Poul la Cour, Albert Betz, Palmer Putnam, y Percy Thomas.
Fue continuado por Johannes Juul, EW Golding, Ulrich Hutter, y William Heronemus,
pero pronto se extendió a otros demasiado numerosos para mencionarlos. Al
comienzo de la re-emergencia de viento, el costo de la energía
13
Las Turbinas de viento son convertidores de energía, independiente de su aplicación, tipo o
diseño detallado, todos los aerogeneradores tienen en común que convierten la energía
cinética de la masa de aire que fluye en energía mecánica de rotación.
La
característica
principal
de
aerogeneradores de eje vertical es
que funcionan
independientemente de la dirección del viento, así que no necesitan un sistema de
orientación para identificar la dirección del viento, pero no es posible instalar turbinas de
viento más grandes de este tipo, debido a importantes desventajas como su dinámica y que
el viento en una superficie cercana al suelo es muy débil.
El tipo de diseño de cada aerogenerador va dirigido hacia su aplicación específica, como
podría ser:
Operación mecánica directa
Conversión en energía hidráulica
Conversión en energía térmica
Conversión en energía eléctrica
En este subtema nos adentraremos en los aspectos técnicos de los aerogeneradores así
también como con su análisis de caudales de viento aplicados sobre estos y sus
componentes, también veremos la eficiencia de los dispositivos en diferentes flujos de
corriente de aire y posteriormente su rendimiento. También nos adentraremos en los
aerogeneradores de eje horizontal, así como algunas de sus aplicaciones y ejemplos de uso,
calcular la forma óptima de las aspas del aerogenerador, su tipo de estructura, cantidades de
aspas, etc.
Esta información se utilizara para considerar las ventajas de usar planos aerodinámicos para
la producción de energía sobre otros enfoques.
La interacción de las fuerzas del ambiente externo, principalmente debido al viento y los
movimientos de los distintos componentes de la turbina de viento, no sólo
resulta en la producción de energía deseada de la turbina, sino también en las tensiones de
los materiales constituyentes.
Para el diseñador de la turbina, estas tenciones son de cuidado, ya que afectan directamente
a la fuerza de la turbina, y con ello afectan su durabilidad. Con el fin de ser un competidor
viable para proporcionar energía, un aerogenerador debe:
producir energía;
resistente;
sea rentable.
Eso significa que el diseño de la turbina no sólo debe ser funcional en cuanto a la
extracción de energía, sino también debe ser resistente para que pueda soportar las
cargas que experimentara, y los costos depara realizar dicha operación deben ser
acorde al valor de la energía que proporcionara.
Electricidad se asocia con muchos aspectos de los aerogeneradores modernos. Más
obviamente, la función principal de la mayoría de las turbinas de viento es la generación de
electricidad.
Se
incluye
la
generación
en
la
turbina
misma, así como
poder transferir en el voltaje del generador, transformando a un voltaje más
alto,
interconexión, con líneas eléctricas, distribuidor, transmisión y eventual utilización por parte
14
del
consumidor.
Electricidad es
de la mayoría de las turbinas de viento.
utilizada en la operación, supervisión y control
Las principales áreas en que la electricidad es importante para el diseño, instalación o
funcionamiento de las turbinas eólicas son:
-
Generación de energía
Interconexión y distribución
Control
Sitio de seguimiento
15
MARCO TEORICO
1.0 Turbinas Eólicas - Diseño Y Componentes
LAS TURBINAS DE VIENTO SON CONVERTIDORES DE ENERGIA.
Independientemente de su aplicación, el tipo o diseño detallado de todas las turbinas
de viento en común tienen el que convierten LA ENERGIA CINETICA DE LA MASA
DEL AIRE QUE FLUYE EN ENERGIA MECANICA DE ROTACION. Dos principios
aerodinámicos son los adecuados para este fin, empuje y arrastre (Fig. 3-1). Los
rotores de arrastre impulsado buscan únicamente, como ya se mencionó coeficientes
de potencia moderada y no son de importancia para las aplicaciones técnicas.
La principal característica distintiva del grupo de los rotores de elevación accionada
es la orientación del eje del rotor. Las turbinas de viento de eje vertical de rotación
tienen la ventaja de que operan independiente mente de la dirección del viento. Pero
las turbinas eólicas más grandes de este tipo no se establecieron debido a
desventajas importantes como su dinámica nerviosa y el viento débil cerca de la
tierra.
Las siguientes secciones se concentran en turbinas de viento con un eje horizontal
de rotación, la Fig. 1 muestra una tipología de las principales características de las
turbinas de viento. Su tipo y diseño están fuertemente influenciadas por la aplicación
específica:
Operación mecánica directa: Muelas de conducción, Sierras, Martillos y
Prensas.
La conversión en energía Hidráulica: Bombeo de agua.
La conversión en energía térmica: Calefacción y refrigeración.
La conversión de la energía eléctrica: La alimentación en una red
eléctrica, operación independiente de una red en combinación con un
sistema de almacenamiento de la batería o la formación de una red de
sistema hibrido independiente, por ejemplo en combinación con un
motor Diesel o de energía fotovoltaica de respaldo.
Unos de los primeros aerogeneradores comerciales para alimentar de electricidad a
la red fue el Vestas V-15 con una potencia nominal de 55KW (Fig. 2). Al comienzo de
1980 fue fabricado e instalado en grandes números. Tenía todos los componentes
esenciales de las turbinas conectadas a la red:
Aspas del rotor de freno aerodinámico, y el cubo: Rotor.
Conducción del tren: Eje del rotor, cojinetes, frenos, caja de cambios y
el generador.
Sistema de orientación entre la góndola y la torre: guiñada de
rodamiento y de unidad.
Estructura de soporte: torre y cimentación.
Componentes eléctricos para el control y la conexión a la red.
16
Fig. 1- Tipología y aplicaciones de turbinas de viento
TREN DE IMPULSION
GONDOLA
EJE
FRENO
FRENO AERODINAMICO
TORRE
MARCO DE GONDOLA
CAJA DE CONTROL
IMPULSION DE GUIÑADA
SISTEMA DE GUIÑADA
(Conectada a la torre para
supervisión)
Fig. 2 VESTAS V5, vista general y seccion de gondola
17
1.1 Rotor
El corazón de una turbina eólica es el rotor que convierte la energía eólica en
energía mecánica de rotación. En esta sección, las características generales del
rotor son tratados, tales como la posición en relación con la torre, la relación de
velocidad de la punta o la velocidad de rotación y el número de aspas. Las
siguientes secciones presentan a continuación: El diseño geométrico y constructivo
de la hoja sola y el cubo, que une las aspas al eje del rotor.
Las turbinas de viento con un eje horizontal de rotación se pueden distinguir por su
posición del rotor en relación con la torre.
El mercado actual está dominado por los rotores contra el viento: en relación con el
viento su rotor se encuentra en frente de la torre (barlovento).
Rotores Downwind (bajo viento) tienen su rotor detrás de la torre (sotavento). La
principal desventaja de esta configuración, en términos de cargas, autorización y
aceptación, es que el aspa de rotor pasa periódicamente a través del flujo alterado
de la estela de la torre que es una fuente adicional de cargas y ruido. Además, las
fuerzas aerodinámicas que actúan sobre el colapso de las palas del rotor en la estela
de la torre, por lo tanto, a adición y el aumento de las cargas se producen en un
rotor a sotavento alterno. La ventaja del rotor a favor del viento es que un sistema de
guiñada pasiva es generalmente posible, pero esto se aplica sólo para turbinas
eólicas más pequeñas.
La velocidad de rotación n del rotor (en la siguiente velocidad del rotor) es uno de
los principales parámetros de diseño de una turbina eólica. La potencia de una
turbina eólica
𝑷 = 𝑴 𝜴 = 𝑴 𝟐𝝅 𝒏
Ecu. 1
Es el producto del par del rotor M y la velocidad rotacional angular Ω=2 π n. La
velocidad del rotor y la velocidad del viento están vinculados por la relación de
velocidad de punta.
𝝀 = (𝟐_(𝝅 𝒏) 𝑹)/𝒗_𝟏 = 𝜴 𝑹/𝒗_𝟏
Ecu. 2
La turbinas eólicas que funcionan a una velocidad constante del rotor tienen una
relación de velocidad punta que disminuye con el aumento de la velocidad del viento,
debido a 0 ~ n /v₁. Por lo tanto, alcanzan el valor óptimo de 0D del diseño
aerodinámico solo a una velocidad de ciento determinada. Las turbinas eólicas de
velocidad variable, por el contrario, operan dentro de un gran rango de velocidad del
viento a su relación de velocidad de la punta de diseño 0D si la descarga accionada
de varia de manera apropiada. Por lo tanto, la operación de la velocidad variable es
ventajosa para la eficiencia del rotor, pero se requiere un esfuerzo significativo por
18
parte de los convertidores eléctricos (CA-CD-CA) para mantener constante la
frecuencia de (50 a 60 Hs) para alimentar a una red.
Fig. 3 Tipos de turbinas correspondientes a los triángulos de velocidad
19
Fig. 4 Velocidad punta máxima de aerogeneradores de 3 aspas
Las turbinas de viento con una relación de velocidad punta bajo el diseño
proporcionan un alto par de arranque y requieren muchas cuchillas para una alta
solidez de la zona barrida por el rotor (Fig. 3).
Las turbinas de viento con diseño a una relación de velocidad punta elevada solo
requieren unas pocas palas delgadas, pero para alcanzar las condiciones de flujo
favorables, destinados del perfil durante a la puesta en marcha algunas de ellas
requieren un procedimiento especial de respuesta en marcha: ya sea el
funcionamiento del generador como motor a turbina de paro-controlado.
Las turbinas de viento con ʎD>9 ya no se producen porque al interferir el ruido
aerodinámico del rotor aumenta aprox. con la quinta potencia de la punta de la
velocidad de la cuchilla. Como resultado, se mantendrá la velocidad máxima de la
punta por debajo de 80-90m/s, la Fig. 4 muestra los valores de la velocidad máxima de
la punta de las turbinas eólicas comerciales. Los datos se dividen en dos grupos, las
turbinas de control de potencia por tono y por parada. En general, estos últimos
tienen una velocidad pico máximo ligeramente inferior que el primero debido a su
mayor generación de ruido por la separación de flujo en el efecto de bloqueo.
El número de aspas en el rotor se relaciona indirectamente con la relación de
velocidad punta (Fig. 1 y 3).Los rotores con una velocidad punta elevada para las
turbinas de viento generadoras de electricidad tienen principalmente tres palas del
rotor diseñados con perfiles aerodinámicos de alta calidad. Un pequeño número de
aspas es preferible debido a la gran parte de los costos de inversión del rotor, que es
de aprox. 20 a 20% del total de los costos de inversión de aerogeneradores. La
distribución de las fuerzas de masa y Aerodinámica en el área de barrida por el rotor
es más, incluso en motores de tres aspas (Fig. 3). Con el resultado de que su
comportamiento dinámico es más tranquilo, reduciendo así las cargas en todos los
componentes. En el rotor de dos aspas, la frecuencia de inclinación natural del
sistema de la Torre Góndola depende de la posición angular de las cuchillas. Si las
cuchillas están en posición vertical, la frecuencia natural es menor que cuando las
cuchillas están en la posición horizontal.
El rotor de tres aspas es el que tiene menor número de cuchillas para ser
considerados dinámicamente como forma de disco y por lo tanto tiene una rotación
suave. Como bien en términos de la impresión visual del rotor de tres aspas gira de
una manera tranquila. En contraste con el rotor de dos palas que tiene un giro de
forma “nerviosa”.
No hay ninguna razón física para seleccionar un tipo de sentido de giro particular de
rotación. Hoy en día, es común que los rotores giren en sentido de las manecillas del
reloj. Si todas las turbias de viento en un parque eólico tienen el mismo sentido de
rotación, entonces se logra una impresión visual más placentera.
20
Por la limitación de la potencia, se aplican dos conceptos aerodinámicos diferentes.
El concepto más simple, ya utilizado en Dinamarca en el comienzo de la década de
1980, limitando su potencia por el efecto de perdida, es decir, la separación de flujo
en la aspa del rotor, (Fig. 5). El rotor gira a la velocidad del rotor casi constante y
una velocidad u circunferencial, porque la turbina eólica esta rígidamente unida a la
frecuencia de la red del generador asíncrono utilizado; A alta velocidad del viento v
el ángulo de ataque 𝛼 a entre la cuerda de perfil y la velocidad relativa w se hace tan
grande que el flujo ya no es capaz de seguir el contorno del perfil y separa en el lado
de succión. Este principio de la limitación de potencia exhibe un comportamiento algo
estocástico, por lo que el punto de ocurrencia no puede determinarse exactamente.
El segundo concepto de limitación de potencia se basa también en lanzar la pala del
rotor alrededor de su eje, pero aquí el borde de ataque de la hoja se convirtió en el
viento, que se llama “tono de pluma” Fig. 6. La velocidad relativa se reduce de tal
manera que el ascensor y la potencia resultante son limitados. Este control de
potencia es más suave que la regulación por pérdida Aerodinámica activa porque
aquí los restos de flujo son adjuntos al perfil, se requiere sin embargo ángulos de
paso más grandes. Fig. 7 muestra la comparación de curvas de potencia típicas para
estos dos conceptos de limitación de potencia.
Fig. 5 Vista esquemática del efecto de estela
Fig. 6 Vista esquemática de “Pitching to feather”
Figura 7 Comparación del puesto y pitch de
control: de dos curvas de potencia
(aerogeneradores 600 kW)
21
1.1.1 ASPA DEL ROTOR
El diseño de la pala de rotor único está determinada por los perfiles aerodinámicos
seleccionados, la geometría interna y externa y así como los materiales elegidos.
La calidad requerida del perfil dinámico depende de la relación de velocidad punta
del diseño elegido. Los molinos Weatern (Fig.3, izquierda) solo requieren el perfil de
una placa de curvada, mientras que las turbinas de viento para la generación de
electricidad requieren de perfiles de alta calidad con alta proporción de ascensor y
coeficiente de arrastre (es decir, alta proporción de elevación / arrastre).
Por encima de todo, una alta relación de sustentación/resistencia es importante en la
zona de la punta de la cuchilla. La velocidad local: Por lo tanto, la longitud acorde al
del perfil tiene que ser más grande que permite a los perfiles más gruesos que serán
aplicados a esta sección del rotor. Esto es útil para la reducción del estrés del
material. Las cargas, mas altas se encuentran en la raíz de la pala. Por lo tanto,
diferentes perfiles aerodinámicos se utilizan en la parte interior y exterior de la pala
de rotor, la (Fig. 8), muestra una distribución típica de diferentes geometrías de perfil
a lo largo del radio de la cuchilla.
Fig. 8 Diferentes tipos de radio de la aspa a lo largo de la oja
En los cálculos del diseño de las palas del rotor (estática, vibraciones, etc.) la
posición de 4 lineras, que pasan radialmente a lo largo de la hoja Fig. 9, es de gran
importancia:
La línea es el eje radial de rotación del mecanismo de paso de la pala,
respecto a la línea del centro de la brida de la hoja perpendicular del eje
del árbol del rotor
La línea elástica (centro de elasticidad) es la posición de la línea de
centro de cortante en la estructura de soporte (aprox. Centro de
gravedad del mástil principal). Las deformaciones elásticas de la aleta y
filo de los movimientos son contados a partir de aquí, así como el giro
de la sección de la hoja causaron por momentos de torsión.
La línea de los centros de gravedad representan los puntos de acción
de las fuerzas resultantes de la inercia y el peso.
22
La línea de presión se compone de los puntos de ataque de las fuerzas
de sustentación y resistencia. Cuando se coloca el flujo, que es de
aprox. 30% de la longitud de la cuerda. Si por ejemplo, el efecto se
produce cuando la parada superior a la velocidad del viento nominal de
la línea de presión se moverá a lo que puede causar que la pala del
rotor vibre (aleteo opuesto). Estas vibraciones pueden reducirse
mediante amortiguadores de vibraciones (que contengan líquidos) en la
punta de la cuchilla. Con el fin de provocar el efecto opuesto a lo largo
de una línea definida en la superficie de la hoja y evitar que oscile,
algunas turbinas de viento de puestos regulados están equipados con
generadores de vórtice en la superficie de la hoja.
Fig. 10 Valores de materiales rígidos de Fibra de vidrio y Fibra de carbono
Fig. 11 Producción de Aspas, separación de molde por succión y presión
desde un laso y el frente del molde
23
Fig. 12 Conexión del rotor
Fig. 13 Aspa de rotor con freno integrado
La calidad necesaria del perfil aerodinámico genera requisitos en relación con el
proceso de producción y los materiales aplicados de la pala del rotor. El perfil simple
de un molino occidental, Fig. 3 a la izquierda, se fabrica a partir de planchas de acero
curvadas.
24
Las palas del rotor de las turbinas de viento generadoras de electricidad, diseñados
con una relación de velocidad punta elevada, Fig. 3 centro y derecha, tiene que
satisfacer las demandas más altas. Sus perfiles se laminan sobre todo con plásticos
reforzados con fibra de vidrio (PRFV), y, más recientemente, con plásticos
reforzados de fibra de carbono (CFRP). Estos últimos son más costoso, pero su
resistencia del material admisible es hasta tres veces mayor que la de PRFV, Fig.10.
Su resistencia a la fatiga también tiende a ser más alta, que es ideal para el diseño
de peso ligero.
Los moldes separados para el lado de aspiración y la presión de la cuchilla (Fig. 11)
Están cubiertos con los tejidos de fibras tejidas (mechas), que luego se remojan con
poliéster o resina epoxi. Hoy en día, esto se realiza de forma automática en su
mayoría en un proceso de vacío con el fin de reducir los efectos adversos para la
salud para los trabajadores, evitar las burbujas de aire que reducen la resistencia del
material y lograr un uso de material más definido.
Después de evacuar el molde sellado con una película de plástico, la resina se
bombea en el molde en puntos definidos. Algunos tipos de mechas se entregan ya
empapados de resina (los llamados "pre impregnados"). Por otra parte, algunos
fabricantes utilizan los llamados construcciones sándwich en las que se encuentra
en la madera de balsa entre las mechas interiores y exteriores. En un ciclo de
calentamiento definido la resina se endurece, y finalmente las dos mitades de la hoja
están unidos entre sí. El larguero de la pala GFRP, que provee geometría definida y
la resistencia del material, se llena de espuma y / o adicionalmente, se puso rígido
por GFRP costillas, webs y cinturones (Fig. 9). El revestimiento final tiene que ser
resistente a la intemperie y rayos UV. Una Película de protección contra la erosión
está unida al borde de ataque para reducir la eliminación de material abrasivo en
funcionamiento. Flujo de elementos de control se aplican sobre las hojas, por
ejemplo, generadores de torbellinos, para asegurar condiciones de flujo definidas y
la dirección del flujo a pesar de la fluctuación del viento por el tiempo y una vez por
revolución debido al perfil de viento.
La transmisión de la carga de la pala de rotor GFRP a la brida del cubo de metal es
un tema complicado (Fig. 12). Para esta conexión por tornillo con el cubo, se utilizan
ya sea mangas para espárragos laminados en la raíz de la aspa, o la llamada
"conexión Ikea" con un perno transversal
Otro detalle de diseño que requiere especial atención es la punta de la cuchilla
giratoria de rotores de puestos regulados que sirve como un freno aerodinámico.
Activado por las fuerzas centrífugas, se despliega cuando el rotor está sobre-exceso
de velocidad (Fig. 2 y 13). Para el frenado, una guía roscada gira la punta de la
cuchilla de 90 °, por lo que es casi perpendicular a la velocidad relativa. Puesto que
la punta de la cuchilla giratoria se encuentra en el radio máximo, la sección de anillo
afectada, y así la fuerza de frenado resultante y el par, son muy grandes.
25
Las propiedades específicas de cuchilla cambian con el aumento de tamaño. Diseño
de peso ligero es un imperativo, sobre todo para las palas del rotor de las turbinas
de megavatios. Si las palas del rotor se ampliaron utilizando las leyes de similitud, el
peso de las palas del rotor aumentaría con el cubo del radio de la cuchilla.
El gran peso causaría enormes fuerzas de flexión y correspondientemente alto
estrés que causan problemas con la resistencia del material. Fig.14 muestra la masa
filo de las palas del rotor comerciales frente al diámetro del rotor. Las curvas de
interpolación tienen un exponente de aprox. 2.2 en lugar de 3.0, gracias al diseño de
peso ligero. Por otra parte, el diagrama ilustra que cuando se trata de la pala de
rotor de peso, es ventajoso utilizar epoxi en lugar de resina de poliéster.
Fig. 14 masa filo de las palas del rotor comerciales
1.1.2 EJE (Hub)
Hay varias posibilidades para el diseño del cubo y la fijación de las cuchillas. La
mayoría de ellos fueron probados en la década de 1980 en las turbinas de los
prototipos de diferentes tamaños. En lo que sigue, se presentan estas variantes.
Aunque el eje rígido se utiliza casi exclusivamente para las turbinas de viento
comercial (Figs. 15 y 23). Tal vez los otros tipos de cubo se considerarán de nuevo
durante la evolución futura, ya que ayudan a reducir el estrés y por lo tanto el peso
de los componentes.
La conexión de pala de rotor al cubo se puede hacer
Rígido
Flexibles
26
Mediante el uso de una bisagra (aleteo), véase Fig. 16. Otro tipo de hub especial se
puede utilizar en rotores de dos palas donde las dos palas están fijadas rígidamente
entre sí y tienen una bisagra común en el centro, llama la bisagra se tambalea.
Todos estos tres tipos de conexión de cuchilla-hub se pueden combinar con un
cabeceo controlado de la cuchilla alrededor de su eje y el rotor para la energía de
limitación de velocidad. En teoría, el movimiento también puede ocurrir alrededor del
tercer eje en la conexión de la cuchilla y cubo, el eje de giro. Sin embargo, esto no
se utiliza en la práctica. En su lugar, a fin de compensar las cargas alternos (picos
de par) en esta dirección, los componentes adicionales se incluyen en el tren de
accionamiento (acoplamientos especiales o el apoyo elástico de la caja de
cambios).Fig.17da una visión general de los diferentes tipos de cubo y el alivio de la
tensión alcanzada en la raíz de la pala y el eje del rotor.
Fig. 15-Góndola con el cubo rígido de un rotor de tres palas (foto por la empresa Zollern)
27
Fig. 16- Denominación de las aspas
El rotor aleteo de bisagra es una característica de los 1237 SÜDWIND que tiene un
rotor del viento (Fig.18). La bisagra de aleteo en cada pala alivia el Raíz de
la lámina y el eje del rotor de toda tensión de flexión alrededor del eje aleteo.
Tal tensión de flexión resulta de la 'presión de viento' (es decir, empuje) y el
tridimensional campo de velocidad del viento no uniforme (Fig.19). En un hub con
hoja rígida conexión de las fluctuaciones estocásticas espaciales del viento en el
rotor área barrida causar una excentricidad del punto de acción de las fuerzas
resultantes del rotor eje lleva a flexión en el eje del rotor. Esto también es evitado por
aleteo bisagras.
Durante la operación, se crea un equilibrio entre las fuerzas centrífugas FC y el
empuje de FT en el rotor, Fig. 21. Esto provoca un ajuste automático del ángulo del
aleteo y también su limitación, típicamente debajo de 10°. Ángulos del cono más
grandes sólo se producen si las fuerzas centrífugas son muy pequeñas debido
a la velocidad del rotor baja, es decir, poco antes del rotor la calma es chica.
Por lo tanto se requieren componentes adicionales en el rotor (SÜDWIND), tapones,
equipo o componentes Hidráulicos para asegurar el inicio arriba de la turbina de
viento. Estos componentes son complicados y costosos, por lo tanto, el principio de
bisagra de aleteo rara vez se aplica a grandes rotores.
28
Fig. 17 Diferentes tipos de HUB
Fig. 18- Aerogenerador SÜDWIND 1237, rotor del viento con bisagra de aleteo
Fig. 19- Campo de velocidad de viento tridimensional frente a la turbina de viento, modificado
29
Fig. 20- Equilibrio de fuerzas sobre el rotor
La bisagra aleteo reduce en la raíz de la pala la tensión de flexión en torno al acorde
de perfil en el que el módulo de sección es pequeña debido a las secciones de perfil
delgadas. De esta manera, el peso de la pala del rotor se puede reducir hasta en un
75%. Al menos para el punto de diseño, rotores con un cubo rígido también pueden
beneficiarse del efecto de la compensación parcial de las fuerzas de empuje y las
fuerzas centrífugas, que se utilizan en aleteo rotores de bisagra. Un ángulo de
aleteo fijo se puede introducir, que se llamaba entonces el ángulo de cono.
Un diseño que fue desarrollado específicamente para que el rotor de dos palas es
el eje oscilante (Figs.17 y 21). Reduce las cargas derivadas de las fluctuaciones
espaciales del viento. El eje del rotor es principalmente aliviado de la
correspondiente flexión estrés. En la raíz de la pala del rotor, se reduce sólo la
parte dinámica de la flexión de momento.
El principio de diseño del cubo tambaleante se ha aplicado principalmente para las
grandes turbinas de viento, por ejemplo, Growian (Fig. 21) Y WTS-3. Debido al gran
tamaño de la turbina, la capa límite atmosférica dio lugar a una velocidad del viento
diferente significativamente en la posición superior e inferior de la hoja de
condiciones de flujo ING así cambiantes durante la rotación. Debido a la posición de
la dirección del viento del rotor, esta asimetría es incluso aumentó. Esto es
principalmente porque, en su posición inferior, la hoja pasa a través del déficit de la
velocidad de la torre estela.
30
Fig. 22- suspensión cardan de FLAIR
Fig. 23- Turbina de viento de 35º KW con eje rígido y tren de
engranaje
Permitir que un grado adicional de libertad en la conexión entre la pala de rotor y el
cubo tiene principalmente el efecto de la reducción del estrés en todo el tren de
accionamiento, por una parte. Por otro lado, en el caso de turbinas de viento en el
intervalo MW, la construcción generaron es costoso y susceptible a fallos debido al
peso del rotor pesado y las grandes cargas.
Por lo tanto, el concepto del cubo rígido (Figs.15 y 23) Se prefiere en la práctica,
aparte de algunas turbinas de viento para la investigación y algunos otros prototipos.
Hay dos tipos de montaje de las cuchillas a un cubo rígido:
31
Ángulo de hoja fija, es decir, no pitcheo cuchilla (concepto puesto) y
Ángulo de la hoja variables por las palas del rotor (concepto de
tono).
Fig. 21- Eje oscilantes de GROWIAN
El peso del cubo aumenta significativamente con el tamaño creciente de la turbina
eólica. Debido a su tamaño, la fundición del cubo se limita a unas pocas
fundiciones.
El material es de hierro fundido de grafito nodular (por ejemplo, EN-GJS-400-18-LT,
anteriormente conocida como GGG-40.3). Un concentrador esférica tiene un peso
comparativamente pequeño cubo, pero es desventajosa en cuanto a diseño estrés
minimizando se refiere. Algunos diseños de cubo incluyen un extensor para
alcanzar grandes diámetros de rotor más altos con el mismo cubo y pala del rotor.
32
1.2 Tren de impulsión (tren de engranajes)
1.2.1 conceptos
Hay diferentes formas de arreglos de componentes del tren de accionamiento (Fig.
28). Con Sidering el desarrollo de aerogeneradores comerciales de la década de
1980 en adelante, no hay una "solución definitiva" obvio. Sin embargo, los
ingenieros de diseño de diferentes fabricantes parecen tener diferentes filosofías
de diseño. Varios fabricantes incluso cambiaron su diseño tren de transmisión con
el crecimiento en el tamaño de la turbina de viento. Los dos conceptos básicos son:
El tren de mando integrado en el que los diferentes componentes
con su diferente funciones se fijan directamente entre sí
El tren de accionamiento modular donde la mayoría de los
componentes se fijan por separado en el marco de la góndola.
33
Fig. 28- Conceptos de tren de impulso de varia turbinas
34
1.2.2 Caja de cambios
Observaciones preliminares
La caja de cambios de transmisión de potencia en las turbinas eólicas cambia la
velocidad de rotación de la velocidad del rotor a la velocidad requerida por la
máquina de trabajo impulsada o generador. Los cambios de par debido
correspondientemente a P = T· 2· π· n. En cuanto al puesto de viento
El tamaño de la máquina determina la relación de transmisión requerida. Dado que
la relación máxima velocidad de la punta y la velocidad de punta de pala
correspondiente es más o menos dado, el tamaño del rotor determina la velocidad
del rotor, que, en la mayoría de los casos, es significativamente menor que la
velocidad de la máquina de trabajo impulsada o generador. La velocidad del rotor de
los generadores es principalmente determinada por la frecuencia de la red y el
número de polos, en particular para los directamente conectados a la red
generadores asíncronos. Para otras máquinas de trabajo, los resultados de rango de
velocidad de la gama de las mejores eficiencias ya que la eficiencia total del sistema
debe ser maximizada.
La tabla 1 muestra ambos tipos de engranajes y otros tipos de convertidores de par
y velocidad. Se requiere que el engranaje cónico en los sistemas de bombeo de
viento, para cambiar la orientación del eje de rotación de horizontal a vertical.
Una transmisión por correa se utiliza para optimizar las características de parvelocidad de la bomba centrífuga accionada en relación a las características del
rotor de la turbina eólica. Los primeros aerogeneradores para la generación de
energía basada en el concepto danés con una conexión a la red directa estaban
equipados con dos generadores. Cuando la velocidad del viento era pequeña, se
utiliza una transmisión por correa almacenado detrás de la caja de engranajes para
transmitir potencia al generador más pequeño. Más tarde, este concepto fue
reemplazado por el polo conmutable generadores
Durante los años 1980, se utilizaron convertidores hidrodinámicos y acoplamientos
en varias turbinas de viento grande prototipo (por ejemplo MOD-0A, WTS-3 y WWG0600) para amortiguar los picos de carga y los "impactos" en generador síncrono
(por ejemplo, causadas por la interacción de la pala del rotor con la torre de estela o
por las oscilaciones del tren de impulsión).
Esto es posible debido a que la conducción y el eje accionado se acoplan de
manera flexible por el fluido. Pero las desventajas son menores eficiencias de carga
parcial y el requisito de enfriadores de aceite adicionales. Los convertidores
hidrodinámicos ya no eran necesarios cuando convertidores AC-DC-AC se
introdujeron por el viento de velocidad variable turbinas permitiendo que la velocidad
del rotor sea independiente de la frecuencia de red.
35
Debido al progreso técnico, convertidores hidrodinámicas están siendo reutilizados
de nuevo en algunas turbinas de viento modernas con una velocidad del rotor de
velocidad variable, pero generador relativamente constante (por ejemplo DeWind
D8.2). Por otra parte, se debe mencionar que la eficiencia de carga parcial de los
convertidores AC-DC-AC también es de moderada a pequeña.
TABLA 1- Convertidores de velocidad y torque para turbinas de viento
En contraste con otras aplicaciones técnicas comunes, las cargas y los estados de
funcionamiento de la turbina eólica y su caja de cambios variar considerablemente.
Respetando también los niveles de presión de sonido deseados, esto conduce a
altos requisitos para el sistema de dientes de engranaje, el cojinete y la lubricación.
36
El tamaño de la caja de cambios está determinada por la relación de transmisión
requerida entre el eje del rotor y el eje del generador. Viene dada por la velocidad
del rotor (calculada a partir del diámetro del rotor y la velocidad de punta de pala
nominal) y la velocidad del generador. Una turbina eólica danesa concepto puesto
controlado con un generador asíncrono de cuatro polos, por ejemplo, tiene una
velocidad del generador de aprox. 1500 rpm. En realidad es un poco por encima de
1.500 rpm, dependiendo del deslizamiento del generador. La máxima velocidad de
punta de pala es, de acuerdo con la Fig. 4, Alrededor de 70 m / s para las turbinas
de viento de puesto común. El cuadro 2 muestra la relación de transmisión requerida
para diferentes diámetros de rotor. Los valores son bastante altos, como es la
potencia a transmitir. De ahí que sólo cajas de engranajes con ruedas dentadas son
adecuados como convertidores de par y velocidad.
Diámetro del rotor
20
40
60
80
DRotor
n
en men rpm
66.8
33.4
22.3
16.7
nGeneradoren
1500 (deslizamiento no se
Relación
de
22.4 considera)
44.9
67.3
89.8
rpm
transmisiónen
i kW
Potencia
100
600
1,300
2,300
(aprox.)
Cuadro 2-Relación de transmisión requerida para un concepto danés de
turbinas eólicas parada controlada
(UPunta= 70 m / s) con un generador asíncrono de cuatro polos
Los engranajes tienen ejes paralelos de las ruedas dentadas pareadas,cuadro 1y 4.
En un engranaje recto helicoidal, Fig. 38, Siempre hay dos pares de dientes en
contacto, por lo que hay menos emisión de ruido, y el tiempo de vida esperado es
mayor debido a una mejor distribución de carga . Así que este tipo de arte se ha
establecido cada vez más a pesar de los mayores costos de fabricación.
Pero cuanto mayor sea la relación de transmisión, mayor será la distancia requerida
entre los dos ejes. Cajas de cambio utilizando sólo engranajes rectos seguían
rentables en los aerogeneradores de la clase 500 kW, mientras que al menos un
engranaje planetario es adecuado para las turbinas eólicas más grandes. Por la
misma relación de transmisión requerida, sus dimensiones, los costes y las
emisiones de ruido son más pequeños. El cuadro 3 muestra un estudio de
comparación de tamaño, peso y costes de una turbina eólica de 2,5 MW que
muestra las ventajas de una etapa de engranaje planetario múltiple. El cuadro 4
caracteriza a las diferencias de engranajes rectos y engranajes planetarios.
En la mayoría de los casos, la primera etapa de la caja de cambios (velocidad lenta)
es un engranaje planetario con un eje hueco, las Figs. 39 y 40. Esto permite que el
Sistema rotatorio de hidráulica, electricidad y electrónica para el cubo.
37
Fig. 38-Pequeña turbina de viento (dos palas del rotor del viento) con dos etapas de
engranajes rectos helicoidales
Engranajes planetarios han, dispuestas concéntricamente alrededor de la rueda sol,
tres (o más) ruedas planetarias con contactos de los dientes, tanto en la rueda solar
y la rueda hueca. Las ruedas planetarias están montadas en el portador de
planetario que en sí es ya sea inmóvil o también giratorio, el cuadro 4. La relación de
transmisión es ligeramente diferente, dependiendo de si la rueda hueca o el soporte
planetario son fijo, las Figs. 39, 40 y 41.
Si la rueda hueca gira y el soporte planetario se fija la relación de transmisión es:
𝒊 = 𝒏𝑺𝒖𝒏 /𝒏𝑯𝑾 = 𝒓𝑯𝑾 /𝒓𝑺𝒖𝒏
Ecu. 1
Si la rueda hueca es fijo y el soporte planetario gira, la situación es un poco más
complicado. La Fig. 41muestra que la longitud de AA1es igual a BB1, Por lo que la
relación de transmisión en este caso es
𝒊 = 𝒏𝑺𝒖𝒏 /𝒏𝑷𝒄 = 𝟏 + 𝒓𝑯𝑾 /𝒓𝑺𝒖𝒏 Ecu. 2
38
TABLA 3- Comparación de tipos diferentes de engranajes para un aerogenerador
De 2,5 MW
39
Fig. 39- Caja de engranajes de tres
etapas para aerogeneradores con rueda de hueco fijofixed
hollow wheel
Fig. 40- Caja de engranajes de tres etapas
40
La ventaja del engranaje planetario es que la fuerza tangencial por contacto los
dientes se reducen por el número de planetas. Con tres ruedas planetarias es F / 3
bajo 120 ° en la rueda de sol y menos de 180 ° (de sol y de contacto de la rueda
hueca) en cada rueda planeta, cuadro 4. El diseño con una rueda hueca de rotación
es más complicado, pero menos ruido se propaga directamente en la carcasa que en
el caso de una rueda hueca fija.
La caja de cambios tiene que cumplir varias exigencias: que sin duda debería
funcionar sin problemas, tienen poco peso y dimensiones, tienen un bajo nivel de
emisión de ruido (sobre todo sin tonalidad), sobrevivir aún mayores daños y también
se necesita mantenimiento amigable. Por otra parte, la lubricación necesaria se ha
de asegurar en condiciones muy diferentes estados de funcionamiento, también a
velocidades muy bajas (ralentí, puesta en marcha) y en condiciones climáticas
difíciles. Estas demandas parcialmente conflicto en curso del procedimiento de
diseño y requieren un alto esfuerzo en el cálculo de la estática, dinámica, resistencia
del material y la vida útil.
TABLA 4- Comparación de engranajes y de engranajes planetarios
41
1.2.3 Los acoplamientos y frenos
Debido al enorme esfuerzo de torsión, hay un acoplamiento rígido entre el eje del
rotor y el eje de la caja de cambios lentos. En los trenes de accionamiento con un
soporte de tres puntos del eje del rotor, este último se fija en el eje hueco de la caja
de cambios mediante un ajuste de interferencia de montaje (Fig.40), Ya sea por
contracción o fuerza de ajuste que es más fácil de desmontar.
Entre el eje rápido de la caja de engranajes y el generador, sólo se requiere un eje
delgado para transmitir el toque más pequeño. Pero estos dos ejes requieren un
acoplamiento elástico ya que puede haber un desajuste entre la caja de engranajes
y el generador. Por otra parte, los dos componentes del tren de accionamiento están
montados elásticamente sobre el ruido y la vibración que absorbe elementos de
amortiguación. De modo que el acoplamiento se utiliza es la prueba de torsión pero
elástica con respecto a la flexión (multi-disco de embrague, discos o pernos de
acero en los ojos de goma), Figs. 42 y 43. A fin de proteger la caja de engranajes y
el generador, una sobrecarga protección es a menudo integrado en el acoplamiento
del eje rápido (el deslizamiento del embrague o pernos de seguridad).
Fig. 41- Relaciones en un engranaje planetario con rueda hueca fija
Fig. 42- Acoplador de eje entre generador con disco de freno y la caja de engranajes
42
Las directrices de certificación de la Lloyd alemán requieren dos sistemas de
frenado independientes. Al menos uno de ellos tiene que actuar en el lado
aerodinámica en el rotor. En las turbinas de viento de puestos controlados por esto
se hace por los frenos de punta, es decir, el giratorio puntas de las cuchillas (Figs. 2
y 13), Mientras que las turbinas eólicas controladas por paso de rotar toda la cuchilla
(véase el capítulo 1). El segundo sistema de frenado tiende a ser un freno de disco
mecánico. En los aerogeneradores más pequeños (<600 kW) se encuentra ya sea
en el eje rápido o en el eje de baja velocidad (Fig. 38),
Que tiene la ventaja de que las cargas no pasan a la caja de cambios cuando se
frena el rotor. Pero con el aumento de tamaño de la turbina de viento la frenada par
aumenta fuertemente, al igual que el diámetro de disco necesario. Una de las
mayores turbinas eólicas comerciales con el freno de disco mecánico en el lado de
baja velocidad de la caja de cambios es el TW-600 fabricado por Tacke (hoy GE
Wind).
Aerogeneradores comerciales de más de 500 kW tienden a tener el freno de disco
en el eje rápido, Fig. 43 y Figs. 31 a 35. El freno está dimensionado para los casos
de carga extrema con paradas de emergencia en el que el rotor tiene que ser traído
de funcionamiento a plena carga o exceso de velocidad hasta el punto muerto en
cuestión de segundos. Durante el funcionamiento normal (no de parada de
emergencia) el procedimiento de frenado se activa el freno aerodinámico al principio
y luego el freno mecánico con el par restante pequeña, con el fin de detener el rotor
completo.
En principio, las turbinas eólicas con sistemas de paso de pala individuo no
necesitan un freno mecánico debido a que el sistema de frenado aerodinámico es
redundante debido a impulsores de paso autónomas. Básicamente, lanzando una
sola hoja de la pluma es suficiente para frenar el rotor de carga completa hasta el
punto muerto.
Sin embargo, un freno mecánico y un bloqueo de rotor con tornillos de fijación son
necesarios para el mantenimiento y reparación en el rotor y en la góndola. En todas
las turbinas de viento, cada vez que el personal está trabajando en el rotor o en el
centro, el bloqueo del rotor debe ser utilizado para fines de seguridad.
43
Fig. 43- Freno de disco en el eje rápido de una caja de cambios
1.2.4 Generadores
Así que esta sección trata solamente los aspectos de los tipos de generadores
relevantes para el diseño del tren de transmisión. El número de polos, junto con la
frecuencia de la red, determina la velocidad del generador y si se requiere una caja
de cambios o no. Generadores asíncronos que están acoplados directamente a la
red, empleados en las turbinas de viento de puesto controlado por lo general tienen
4, 6 u 8 polos. A partir de una frecuencia de red de 50 Hz a continuación, sigue una
velocidad del generador síncrono súper ligeramente por encima de 1.500, 1.000 o
750 rpm (dependiendo de la barbotina).
Los Generadores asíncronos doblemente alimentados tienen una velocidad
variable, pero el rango de velocidad de operación está en un orden similar. Sólo los
generadores de anillo de múltiples polos de baja velocidad (excitación
independiente o permanentemente magnético generadores síncronos excitados)
puede funcionar sin una caja de cambios, Fig. 30.
Un tipo híbrido es el generador de velocidad media de la Multibrid M5000 con un
número de polos moderada accionado por un engranaje planetario, con una
velocidad del generador de aprox. 150 rpm, Fig. 37.
Con una potencia de más de 1 MW, el enfriamiento del aire alcanza sus límites. Así,
el agua enfría generadores también se aplican. Los generadores de anillo de
turbinas eólicas sin engranajes, Fig. 30, Son lo suficientemente grandes para la
refrigeración de aire eficaz, pero el ruido de la generación en el pequeño espacio
entre el rotor y el estator del generador tiene que ser minimizado.
44
1.3 Agregados auxiliares y otros componentes
1.3.1 Sistema de orientación
En el caso de molinos de viento históricos, se requiere un gran esfuerzo para la
orientación del rotor perpendicular al viento. El molinero tenía la tarea molesta de
empujar la polea de cola con el fin de ajustar el rotor a la dirección variable del
viento. Sólo en el medio de la 18º siglo, hizo la invención de la cola de milano
permite que el proceso de guiñada a ser automatizado. Incluso hoy en día el sistema
de orientación es un subsistema funcional "no trivial" de la turbina eólica.
Las turbinas de viento con una orientación del eje de rotor horizontal permiten que
sea
Sistemas de guiñada pasivos por ejemplo guiñada autónoma de una
turbina con un rotor a favor del viento o en turbinas de Rotor a barlovento
Sistemas de desvío activos se aplican - por ejemplo, a unidades de la cola
de milano o de guiñada accionados por energía externa (también
conocidas como unidades de acimut).
EL rotor de la dirección del viento (sotavento en relación a la torre, por ejemplo
SÜDWIND Fig. 18) Es adecuado para la guiñada pasiva autónomo de la turbina de
viento porque si la dirección del viento no es paralelo al eje del rotor, la fuerza de la
presión del viento sobre el rotor provoca un momento de guiñada alrededor del eje
de la torre que ajusta el rotor a la dirección del viento, similar a una aleta. Sin
embargo, para las turbinas de viento con una relación de velocidad punta alta, que
tienen una relativamente baja solidez de la zona del rotor, esto sólo funciona cuando
el rotor está girando. Por lo tanto, para bajas velocidades de viento, la góndola en sí
tiene una función pasiva como una especie de "aleta" accionar.
El piloto de viento para la guiñada pasiva de turbinas de rotor corriente arriba es una
característica de la fábrica de Western (Fig.1).
Debido a su sencillo sistema de- firmar y el hecho de que no se requiere ni energía
externa ni de control, sino que también se utiliza comúnmente en otras turbinas
eólicas pequeñas, especialmente los cargadores de batería.
Sistemas de guiñada pasivos tienen que ser diseñado de tal manera que los
cambios repentinos en la dirección del viento no provocan movimientos de guiñada
rápida producción de fuertes cargas adicionales debido a las fuerzas giroscópicas.
En los rotores de una y de dos palas la situación es aún peor. La inercia en contra
de guiñada depende de la posición de las palas del rotor angular que aumenta las
fuertes cargas dinámicas. Por lo tanto, la aplicación de sistemas de guiñada pasiva
se limita en general a un diámetro de rotor de hasta 10 m.
45
Sistemas de desvío activo: posicionar la góndola utilizando unidades de
accionamiento y se aplican en las turbinas eólicas de tanto en contra del viento y la
dirección del viento configuración del rotor.
No se necesita energía externa si el propio viento está impulsando la cola de milano,
orientado perpendicular al rotor como en los molinos de viento holandeses. El par de
este pequeño rotor auxiliar (roseta), Fig.44, Se transmite utilizando un engranaje
helicoidal con una alta relación de transmisión (hasta 4000) para el conjunto giratorio
del sistema de guiñada.
Un sistema de guiñada con una o más unidades de guiñada eléctrico o hidráulico es
más común para las turbinas eólicas más grandes. Ellos se controlan mediante la
señal de un pequeño piloto de viento en la parte superior de la góndola, Figs. 30 y
32 Y actuar en el engranaje de estímulo de la gran asamblea que gira a la conexión
de la torre de la góndola, Figs. 44 derechos y 45 derecha. Aerogeneradores multiMW pueden tener hasta ocho unidades de guiñada.
46
Fig. 44- izquierda: turbina de viento con roseta de desviación (Allgaier); derecha: desvío del
cojinete con la impulsión de guiñada y guiñada frenos
Fig. 45- Izquierda: sección de una unidad de guiñada con engranaje
planetario multi etapa, motor quitada
Derecha: impulsión eléctrica del desvío, guiñada frenos y sensor de ángulo
de guiñada
47
1.3.2 Calefacción y refrigeración
Las turbinas de viento tienen que operar dentro de un gran rango de temperatura en
base a las condiciones climáticas en el lugar. Por otra parte, las pérdidas de calor de
la caja de engranajes y generador de calor hasta la góndola. Las temperaturas no
deben exceder el rango de funcionamiento admisible de los componentes
instalados, por encima de todos los componentes electrónicos sensibles. Para una
eliminación de calor definido, el flujo de aire es dirigido por los sistemas de
ventilación especiales. Su diseño tiene que considerar también la minimización de la
emisión de ruido y de la propagación del sonido en el aire.
Aparte del sistema de refrigeración para la propia góndola, hay refrigeradores
separados por ejemplo para la caja de cambios de componentes de la transmisión y
el generador, Figs. 34 y 36. Dado que el nivel de temperatura admisible del
generador es a menudo mayor que el de la caja de cambios, un ciclo de
refrigeración de aceite-agua combinada puede ser utilizado, Fig. 46. El enfriador de
agua-aire a menudo se encuentra fuera de la góndola, que luego pueden ser
completamente encapsulados, por ejemplo, para el aire acondicionado en las
aplicaciones offshore. Si el aceite de la caja de cambios se recalienta, las
propiedades de lubricación pueden degradarse debido a la destrucción de los
aditivos, y la vida de servicio de la caja de cambios pueden ser reducidos
significativamente.
En la época de invierno, las temperaturas ambientales pueden caer por debajo de 0
° C, incluso fuera de los lugares de clima frío. Después de una parada prolongada,
el aceite de la caja de cambios también se convierte en frío y su viscosidad
aumenta, causando problemas de lubricación durante las turbinas de viento 'de
puesta en marcha. Para asegurar una buena lubricación, se instalan calentadores
adicionales. Más aún, las temperaturas en los gabinetes electrónicos no deben ir por
debajo del rango permitido. Una encapsulación de la góndola o la totalidad de
turbina eólica por ejemplo, con persianas en todas las aberturas de ventilación son
adecuadas, pero la refrigeración eficaz de la góndola no debería ser perturbada en
verano.
Por otra parte, los sistemas de calefacción de pala de rotor están instalados, si
existe un mayor riesgo de formación de hielo. De hielo en las palas cambia las
características aerodinámicas y las causas aumentó drásticamente las vibraciones
debido a la masa adicional de desequilibrio del rotor. Las influencias negativas de
agua de condensación en la hoja también se reducen por el calentamiento pala de
rotor, que se realiza ya sea eléctricamente con cables de calentamiento en el
laminado cuchilla o por soplado de aire caliente de la góndola en el cubo y las
paletas.
Anemómetros y veletas con calefacción también son útiles en condiciones de
formación de hielo. Un anemómetro congelado causaría, por ejemplo, pérdida de
rendimiento debido a que el aerogenerador no puede comenzar a pesar de la buena
velocidad del viento.
48
Una aleta congelada puede sugerir, dependiendo del ángulo con relación al eje del
rotor, se produce una desviación permanente de la dirección del viento causando
guiñada permanente - o puede ocultar las desviaciones de dirección del viento
existentes causando errores de ángulo de guiñada con cargas adicionales. Ambos
representan un potencial peligro para la turbina de viento, ver por ejemplo,
Fig. 46 - Aceite combinado - agua - ciclo de caja de engranajes y generador de
enfriamiento
1.3.3 Protección contra rayos
El rayo es un peligro potencial para las turbinas de viento, debido a su gran altura
total y su instalación en los lugares expuestos. En consecuencia, existen directrices
para el diseño del sistema de iluminación, por ejemplo, IEC 61400-24,
Estadísticamente, una turbina de viento en Alemania sólo se golpea una vez cada
10 años por un rayo, pero en los sitios expuestos en las tierras altas de Alemania
este número es significativamente mayor. A menudo, el flash golpea la turbina en el
punto más alto, es decir, la punta de la cuchilla. Sin embargo, en el caso de
grandes turbinas de viento de la clase MW, un flash se puede propagar hacia arriba
desde la turbina en las nubes.
Las palas del rotor suelen estar equipados con receptores de rayos especiales en la
zona de punta de pala. Estos son discos de metal de aprox. 5 cm de diámetro
integrado en la cara de la hoja de superficie. Otros fabricantes instalan varios
receptores a lo largo del radio de la cuchilla. O la punta de la hoja, así como el borde
delantero y trasero son de aluminio. Las corrientes de alta relámpago (hasta 1000
kA) se llevan a cabo de una manera definida por ejemplo, por cables de metal
dentro de la pala del rotor. Si el agua de condensación en la pala del rotor fueron
para calentar y evaporar por la energía del rayo, la hoja podría explotar. Muchos
49
fabricantes de palas instalar tarjetas de registro de rayos en cada base de la pala
para grabar corrientes. El análisis posterior proporciona la base para detectar
posibles daños de la cuchilla.
Con el fin de proteger a toda la turbina de viento contra daños causados por rayos
las corrientes tienen que llevarse a cabo a su vez en el suelo. Es importante
proteger los rodamientos como las altas corrientes que apuntaría a la soldadura de
las bolas y de la superficie de rodadura juntos.
Fig. 47- Componentes del sistema de protección rayos para la protección de los
rodamientos
Para evitar esto, la chispa lagunas y / o contactos deslizantes con escobillas de
carbón están instalada, Fig. 47. El primer punto crucial en una turbina de viento con
un sistema de paso es el rodamiento de pala entre las palas del rotor y el cubo, el
segundo es el rodamiento del rotor ESTÁ el centro entre y el marco de la góndola, y
el tercero es la corona de orientación entre el marco de la góndola y la torre. El
esquema del sistema de protección contra rayos con las diferentes zonas de
protección contra rayos (LPZ) se muestra en Fig. 48. LPZ 0, por ejemplo, significa
que el objeto (rotor, la parte superior de la góndola con sensores de viento) puede
estar directamente afectada por la huelga. Desde el interior de la torre a la varilla de
tierra, las medidas de protección necesarias son los mismos que para edificios
técnicos. Componentes electrónicos, el control, a paramenta, transformadores, etc.,
tienen aumento adicional y protección contra rayos.
Sólo aprox. 30% de los daños de rayos en aerogeneradores en Alemania el
resultado de impactos directos, mientras aprox. 60% son causados por huelgas en
las líneas eléctricas y de telecomunicaciones. Por lo tanto, se requiere un concepto
de protección contra rayos según los estándares. Una inspección periódica de la
resistencia de puesta a tierra es necesaria para asegurar que las funciones del
sistema de protección contra rayos correctamente en operación de la pala del rotor
hasta el suelo.
50
Fig. 48- Zonas de protección de relámpago (LPZ) de una turbina de viento
1.3.4 Los dispositivos de elevación
La mayoría de las turbinas eólicas más grandes están equipados con
cabrestantes para levantar herramientas y piezas de repuesto de menor tamaño
para arriba en la góndola. En aerogeneradores multi-MW; a menudo existe también
una grúa de giro o grúa aérea interior de la góndola para mover objetos pesados,
Figs. 30, 34 y 35. Para el intercambio de piezas de gran tamaño, se necesitan
grúas móviles, al igual que para la construcción de turbinas de viento. En las
góndolas de las turbinas eólicas en el mar las grúas integradas suelen ser más
grande ya que los costos de los buques (externa) de la grúa son extremadamente
altos. Fig. 49 muestra una "grúa góndola" tales que es adecuado para la sustitución
de componentes del tren de accionamiento completo (cojinete del rotor, caja de
cambios y el generador).
51
Fig. 49- Izquierda: góndola con grúa adicional, derecha: modelo (Liebherr)
Fig. 50- La izquierda: Sensor de aceleración, derecha: sensor de velocidad de
revolución en la parte posterior del generador
1.3.5 Sensores
El sistema de supervisión y control de la turbina de viento (ver capítulo 12) aliado
continua procesa numerosos datos sobre la operación y las condiciones ambientales
que son provistos por numerosos sensores en la turbina de viento y en la góndola.
Los datos de operación siguiente se adquieren de forma permanente:
Velocidad y dirección del viento (Fig. 32)
Rotor y velocidad del generador (Fig. 50)
Las temperaturas (ambiente, rodamientos, caja de Cambios, generador,
góndola)
Presión (aceite de caja de cambios, sistema de refrigeración, el sistema
hidráulico de tono)
Pitch y el ángulo de guiñada (Figs. 27 y 45)
52
Datos eléctricos (tensión, corriente, fase)
Las vibraciones y la oscilación de la góndola (por ejemplo, sensor de
aceleración, Fig. 50, Así como interruptores de proximidad para la parada
de emergencia)
El tipo de sensor aplicado y su montaje puede variar considerablemente para los
diferentes tipos de turbinas de viento. En el caso de sensores de monitoreo
adicionales a menudo se discutió si son "sólo otro componente eléctrico adicional",
que aumenta el riesgo de fracaso y los tiempos de parada, produciendo la pérdida
de rendimiento y aumento de los costos de operación y mantenimiento (O & M). O,
si proporcionan información muy útil para la detección de daños inminentes, la
programación (preventiva) de O & M y, por lo tanto, ayudar a aumentar el
rendimiento y el rendimiento y reducir los costos de operación y mantenimiento
.Datos de operación correcta y continua es fundamental para el seguimiento y el
rendimiento de la turbina de viento ING mejo. La experiencia adquirida a partir de los
datos de funcionamiento revela parcialmente una vida útil de los componentes más
baja que asumió durante el diseño que puede presentar el operador y los seguros
con problemas financieros.
Daños graves a menudo causan daños consiguientes a otros componentes, por otra
parte, por ejemplo un reemplazo caja de engranajes requiere la eliminación costosa
del rotor con una grúa móvil. No sólo los costos de mantenimiento y reparación, pero
la pérdida de rendimiento debido al aumento del tiempo de parada hasta que la
reparación (el mal tiempo y la accesibilidad), es también un problema. Por lo tanto,
en las turbinas eólicas más grandes y en especial los que tienen difícil acceso como
los parques eólicos marinos, el número de sensores se incrementa y por ejemplo, se
instalan los sistemas de monitoreo de condiciones (CMS). Estos sistemas están
certificados para la topografía de la condición de los rodamientos y la caja de
cambios por el análisis de la frecuencia de las vibraciones medidas. Seguimiento y
análisis a distancia y luego observa la evolución de los daños potenciales, por lo que
la programación de las medidas de reparación es más fácil, y se evitan daños
graves con daños consiguientes.
En las turbinas eólicas en el mar también es necesaria la supervisión extensa de
carga por razones de seguros.
A pesar de todos los sensores y sistemas de seguimiento es importante
inspeccionar periódicamente las turbinas de viento. Algunos tipos de daños y sus
causas - por ejemplo, la detección de desequilibrio evitable masa adicional o
desequilibrio aerodinámico así como los errores de alineación de la unidad de tren no haber sido integrada en la CMS hasta la fecha y se revelan sólo mediante
medidas adicionales.
53
1.4 Torre y fundamento
1.4.1 Torre
Cuando el diseño de una turbina eólica de eje horizontal, el ingeniero mecánico a
menudo subestima la complejidad de la construcción de la torre y cimentación. Sin
embargo, la estabilidad de toda la estructura de la turbina de viento es la cuestión
más importante a la hora de solicitar un permiso de construcción. Por lo tanto, en los
documentos del curso de montaje, gran cantidad de certificaciones del fabricante es
"obligatorio". Además de la estabilidad estática, el comportamiento dinámico de la
torre de la turbina de viento es de similar importancia.
Por otra parte, la torre es de gran relevancia para la eficiencia económica de una
turbina de viento por varias razones: Por un lado, se produce una porción
significativa de los costos iniciales de la turbina de viento, aprox. 15 a 20%, y
también determina los costes de transporte y erección. Por otro, la producción de
energía (es decir, el beneficio) depende en gran medida de la altura del buje de la
turbina. Los aumentos de la velocidad del viento con la altura LOGARITHM
rítmicamente en la mayoría de los sitios, y una altura de buje por encima de la capa
límite atmosférica superficial entrega un rendimiento energético superior
constantemente. Por lo tanto, la elección de la altura del buje óptima
(respectivamente altura de la torre) tiene que ser hecho para cada sitio
individualmente. Para facilitar la certificación y selección, los fabricantes ofrecen
cada aerogenerador con varias alturas de las torres de ajuste. Esto ayuda a calcular
la relación óptima costo-beneficio.
Fig. 51- Altura del cubo versus potencia nominal para aerogeneradores comerciales
En la costa (longitud corta rugosidad y menor intensidad turbulenta) la velocidad del
viento recoge rápidamente con la altura por encima del suelo, por lo que en su
mayoría torres más pequeñas son adecuadas, Fig. 51. La capa límite de superficie
interior (mayor longitud de rugosidad y turbulencia intensidad prestado) es mayor, lo
que significa que las torres más altas son más adecuados.
54
La relación de altura de buje de diámetro de rotor es de entre 1.0 y 1.4 para las
turbinas de viento en sitios costeros en Alemania y entre 1,2 y 1,8 para los que
están en los sitios del interior. Los valores más altos son válidas para las turbinas
eólicas más pequeñas, por debajo de aprox. 300 kW, los valores más grandes para
las turbinas de viento de clase MW.
Diseño estructural de la torre es o bien:
Suave
Rígido.
Un diseño de la torre rígida significa que primera frecuencia de flexión natural de
la torre está por encima de la emocionante velocidad del rotor n, respectivamente,
la correspondiente frecuencia de rotación. Un diseño de la torre suave, por el
contrario, significa que la primera frecuencia de flexión natural de la torre está por
debajo de la frecuencia de rotación de la velocidad nominal. En estas turbinas de
viento durante el arranque, el paso de la frecuencia natural de la torre tiene que ser
controlado a fin de evitar efectos de resonancia con el aumento de las vibraciones
del sistema. Fig. 52 muestra el estudio de los diferentes diseños de torre para la
turbina de viento WKA-60. La frecuencia de rotación de 0,3833 Hz es para todos
los diseños de debajo de la frecuencia natural de la primera torre, es decir, para
todo es la relación de frecuencia f 0.1 / n> 1. Pero la frecuencia de paso de pala de
1,15 Hz (frecuencia de rotación multiplicada por el número de la cuchilla) es
siempre por encima de la frecuencia natural de la primera torre. Por otra parte,
resultó en el estudio de diseño que diseña para toda la torre de acero la segunda
frecuencia de flexión natural estaba muy cerca de este emocionante frecuencia
cuchilla. Por lo tanto, la WKA-60 se erigió con una torre de hormigón.
El diseño dinámico de turbinas eólicas de velocidad variable es un tema muy
complicado. Si bien las torres para turbinas eólicas pequeñas y medianas
empresas de menos de 500 kW son construcciones en su mayoría tiesas (rígidas),
es decir, las torres de los grandes aerogeneradores tienen casi siempre un diseño
de torre suave con el fin de ahorrar en materiales y costes.
Otro criterio de diseño de la torre es si es
Una torre auto portante
Un mástil con tirantes (o torre de celosía).
La rigidez contra la inclinación y la torsión de las torres auto portantes es bastante
alto, pero requiere una masa alta si es para ser rígida contra la flexión también. La
torre de celosía necesita la masa de material más bajo para un diseño de la torre
rígida: se puede ahorrar hasta un 50% en comparación con un equivalente torre de
55
acero tubular. Fig. 52. Además, debido a que tiene muchas conexiones, la
amortiguación estructural es mayor que la de la torre de acero. Esta fue la razón por
la cual una gran cantidad de aerogeneradores daneses de la primera generación
fueron diseñados con una torre de celosía, Fig. 2. Más tarde, fueron utilizados con
menos frecuencia debida a su impacto visual en el paisaje y también causa ESTÁ el
de los costos, teniendo en cuenta la mayor parte del costo del trabajo involucrado en
la fabricación y montaje que es una desventaja por ejemplo, en el norte de Europa.
Hay un mayor grado de automatización posible en las torres de acero tubular
fabricación con la flexión y máquinas de soldadura, Fig. 53, la parte superior.
Fig. 52- Varios diseños de torre
Sin embargo, las torres de celosía se utilizan ampliamente en los países que tienen
una estructura diferente de los costos de producción (costos laborales más bajos en
comparación con los costos de la materia). Además, son una opción para las torres
de gran altura (la altura del cubo por encima de 100 m) en sitios interiores alemanas
donde su bajo peso específico de la torre es ventajoso. Una línea de productos torre
de celosía tiene costos de certificación más bajos. El montaje in situ de los
segmentos de torre, Fig. 53 inferior, reduce las dimensiones de los componentes y
por lo tanto evita los límites de transporte para el diámetro máximo de la torre
(ANCE holgura por debajo de puentes y curva de radio de carretera) existentes para
las torres tubulares de acero y torres de hormigón
56
Fig. 53- Produccion de segmentos de tubos de hacer, y soldadura; instalación y montaje
Torres tubulares son fabricados con una ronda o una sección poligonal. El área de la
sección crece de forma cónica (o en pasos cilíndricos) desde la parte superior a la
parte inferior de la torre tomando en cuenta el momento de flexión en aumento, por
encima de todo el crecimiento de la palanca de empuje del rotor. Por otra parte, en
la parte inferior de la torre, el ahorro de un material de diseño de tubo con de gran
diámetro y espesor de pared pequeño no altere la aerodinámica del rotor. Los
límites de transporte ya mencionados para las turbinas de viento de la clase MW
Multi es la distancia máxima por debajo de los puentes de 4,0 a 4,2 m. El diámetro
máximo inferior de la torre de un Vestas V-80 (2 MW) es exactamente 4,0 m. Torres
tubulares se fabrican principalmente de acero.
Sin embargo, torres de hormigón hiladas también se aplica que tienen menores
costos de producción, pero los mayores costos de transporte y montaje, ya que se
necesita una masa mucho mayor.
57
A fin de simplificar el transporte y el montaje existe la alternativa de la producción en
el lugar de la torre de hormigón utilizando un marco de elevación, Fig. 54. Pero en
este caso el control de calidad es difícil. El trabajo tiene que llevarse a cabo con
mucho cuidado, si el hormigón se procesa en 100 m de altura a bajas temperaturas
en el invierno. Por lo tanto, otra alternativa se desarrolló, por ejemplo, por el
fabricante ENERCON, con su montaje de la torre a partir de segmentos de hormigón
producidos en el taller en condiciones definidas. Este proceso tiene ventajas de
costos en comparación con el en el lugar con- creta método especialmente para una
producción en serie más grande. Torres de hormigón tienen un amortiguamiento
estructural superior a torres de acero, pero requieren anclajes de tensión y cables de
acero para pretensado del hormigón que sólo tiene una capacidad limitada de
soportar fuerzas de tracción.
La torre híbrido es un tipo de torre que combina las ventajas de ambos materiales de
la torre, hormigón y acero. El fondo de la torre es de hormigón con el fin de evitar los
límites de transporte, y la parte superior de la torre es de acero. Fig.55 muestra una
torre híbrida con sólo una corta base de hormigón. Las anclas de tensión que
conectan las dos partes de la torre y pretensado del hormigón están dentro de la
torre y de libre acceso para permitir que la tensión que se desea controlar y
reajustar.
Fig.54- Torre hecho de hormigón con elevación encofrado
58
Fig. 56 da una visión general de la típica torre de peso específico frente a la altura
del cubo para los diferentes tipos de torres auto portante. La gran difusión de los
valores de una determinada altura del buje es atribuible a diferentes tipos y
fabricantes
.
Los Mástiles con cables de retención son un tipo común de torre de las turbinas
eólicas más pequeñas, por ejemplo, AeroSmart 5 (Fig. 57izquierda) y SÜDWIND
1237 (Fig.18). Son torres ligeras y son adecuados para el montaje con un torno, es
decir, sin ningún tipo de grúa auxiliar, lo que reduce significativamente los costos de
transporte y montaje, Fig. 58, A la derecha. Los mástiles arriostradas necesitan una
tensión definida en los cables de sujeción que tiene que ser revisado
periódicamente. Un modelo interesante de este mástil fue desarrollado para un
sistema híbrido recipiente (que comprende eólica, solar, diésel, batería, etc.), Fig.
57b. Los cables del mástil y del individuo están anclados al recipiente, lo que no hay
requisito para una base adicional y el anclaje en el suelo.
59
Otros tipos de torres especiales para las pequeñas turbinas de viento también se
orientan a facilitar el montaje y la reducción de la turbina (por O & M o durante la
tormenta) son el mástil "en forma de A". Estas últimas necesidades sólo anclar
clavijas en lugar de las bases de hormigón debido a la gran base de apoyo entre sus
piernas.
Fig. 57- Izquierda: venteado Polo; derecha: sistema móvil híbrido
Fig. 58- Izquierda: navegar turbina eólica con vientos A polos; derecha: erección
con un torno
1.4.2 Fundación
Las turbinas de viento han mayormente una base en forma de bloque a partir de
bloques de hormigón Fig. 59. El fundamento central para de torres auto portantes
está dimensionado para evitar que la turbina se incline (evitando una junta abierta).
En contraste con esto, los mástiles arriostradas tienen un diseño fundación
separada, (Figs. 57, 58 y 60). El fundamento principal del mástil evita que se hunda
en el suelo (debido al peso y las componentes verticales de las fuerzas de tracción)
Considerando que las bases de anclaje de la arriostrado absorben las fuerzas de
60
tracción. En las torres de celosía, las fundaciones separadas tienen que soportar
una combinación de esta carga.
La base de la diseño de la cimentación plana es una experiencia del suelo lo que
demuestra que en el sitio elegido el suelo proporciona al menos la capacidad de
carga mínimo estimado en curso del diseño de la turbina eólica.
Si el suelo es muy suave (por ejemplo, las tierras pantanosas de la costa del Mar del
Norte) no es la exigencia de una cimentación por pilotes costoso adicional. Fig. 59
muestra una base plana típica durante su construcción. Antes de la colocación del
concreto, es importante instalar la alimentación de cables y la conexión a tierra. La
fundación de un ejemplo, de 600 kW de aerogeneradores requerido aprox. 165 m³
de hormigón y cerca de 25 toneladas de acero de refuerzo.
Fig. 59- Fundación plana
Fig. 60- Fundación para el poste de acero tubular venteado
61
1.5 Montaje y Producción
Las barquillas de las turbinas eólicas se montan principalmente en la fábrica y se
transportan como una unidad al sitio. En la fábrica, se necesitan grúas de diferente
capacidad para mover los componentes (estructura de la góndola, la caja de
engranajes, generador, etc.), por ejemplo, puentes grúa o grúas pluma en las zonas
de concentración individuales. Fig. 61 muestra un taller de la empresa ENERCON.
La capacidad máxima de la grúa, un puente grúa sobre todo, se requiere para la
carga de la góndola completada en el camión. Fig. 62 da una visión general de la
masa de la góndola y el rotor de los diferentes tamaños de turbinas de viento. La
comparación de las curvas reales con la curva teórica obtenida por la ampliación de
la masa de acuerdo con las leyes de similitud muestra que con el tamaño de la
turbina cada vez mayor el diseño de peso ligero logró una reducción significativa de
masa.
Fig. 61- Taller de ensamblado de aerogeneradores
Para las turbinas eólicas más pequeñas, el cubo puede estar ya embridado al eje
del rotor en el taller, Fig. 23. Y transportado junto con la góndola. Pero los centros
de aerogeneradores multi-MW son muy pesados y grandes, así que tienen que ser
transportados por separado. En el lugar, el cubo se monta con las tres palas del
rotor en el suelo y luego con bridas al eje del rotor de la góndola ya montado, Fig.
55. Sin embargo, antes de la entrega, hay sobre todo una prueba completa del
sistema del tren de transmisión que incluye el cubo con sistema de paso en un
62
banco de pruebas en el taller.
La profundidad de la producción interna (integración vertical) depende en gran
medida del fabricante. Las dos principales filosofías corporativas son una alta o
baja profundidad la producción interna, ver cuadro 5.
Fig.62 - Rotor y carcasa en masa versus tamaño
Fabricantes más pequeños con una pequeña cuota de mercado tienden más a una
baja en la empresa producción profundidad. Dentro de la casa a fondo la producción
también crece a la par con el aumento de tamaño de la empresa. Una especialidad
de la producción de turbinas eólicas multi-MW es que la mayoría de los fabricantes
no tienen sus propias fundiciones, incluso si su profundidad la producción interna es
alta, algo que puede llegar a ser un cuello de botella. Sólo unas pocas fundiciones
son capaces de producir componentes con un peso de hasta 100 t por sola pieza.
Tabla 5 – Composición de alta y baja producción
63
1.6 Datos característicos de Turbinas de viento
En esta sección se comparan los datos característicos de los diferentes
aerogeneradores comerciales disponibles en los últimos 10 años en Alemania. La
base de datos comprende aprox. 300 tipos de turbinas eólicas con una potencia
nominal superior a 30 kW para funcionamiento conectado a la red. En los
diagramas, los datos característicos discutidos se representan en su mayoría en
contra de la potencia nominal o el diámetro del rotor, ya que estos dos atributos
caracterizan mejor el tamaño de la turbina de viento. Fig. 63 muestra el crecimiento
de las turbinas eólicas conectadas a la red en estas dos décadas. El aumento de la
potencia nominal por el factor de 10 es un éxito excepcional en el área de la
ingeniería mecánica. En el pasado, un desarrollo estimulación comparable lada se
produjo sólo en los campos de la informática y la tecnología de información. Desde
la década de 1990, diámetro de rotor ha crecido por un factor de 8, la altura del cubo
se ha incrementado por un factor de 5.
En cuanto a la potencia nominal en comparación con el diámetro del rotor en Fig.
64, Influencias relacionadas con el sitio tienen que ser tomadas en cuenta. El
aerogenerador debe tener su punto de eficiencia mejor cerca de la velocidad del
viento de máxima densidad de energía
Las turbinas de viento diseñados para sitios costeros con una velocidad media más
alta eólica ya lograr la misma potencia nominal con un área de barrido del rotor más
pequeño que se traduce en una potencia de la zona específica más alta (relación de
la potencia nominal y barridos área del rotor) de hasta
520 W / m² producir la curva límite superior. La curva límite inferior de 290 W / m²
representa el diseño con un rotor más grande adecuado para los sitios del interior
con una velocidad media inferior viento. Por ejemplo, el 2 MW de turbinas eólicas
REpower MM82 de la empresa con un diámetro de rotor de 82 m, diseñado para los
sitios del interior tiene una capacidad-área específica de 378 W / m², mientras que
su hermana MM70 máquina con la misma potencia nominal, pero diseñado para los
sitios costeros de viento llega a 520 W / m2debido a la menor de rotor 70 m.
64
Fig. 63- Tamaño y potencia de producen comercialmente las
turbinas de viento en el tiempo
Fig. 64- Potencia nominal versus diámetro del rotor
Otro número característico de las turbinas de viento que cambian con el tamaño de
la turbina es el aumento de la masa de la góndola y el rotor. Como se discutió en
relación con la Fig. 62, el diseño ligero reduce la masa requerida en comparación
con los valores calculados de acuerdo con las leyes de similitud. Adicionalmente, la
Fig. 65 muestra la masa góndola-área específica, es decir, la relación de la masa de
la góndola y barrió área de rotor. Una resolución temporal de los datos revela que
con los años se ha reducido la pendiente de la recta de regresión. Se puede concluir
que, debido a los conocimientos adquiridos y el desarrollo ulterior de los métodos de
diseño asistido por ordenador () una reducción de peso específico se logró a pesar
de la creciente tamaño de la turbina de viento. Sin embargo, los valores se propagan
ampliamente, porque la mayoría de la fuente de los fabricantes para la misma
potencia nominal un "tipo costero" con un más pequeño y un "tipo interior", con un
diámetro de rotor más grande, como se mencionó antes.
65
La Fig. 66 muestra el par-masa específica (relación de par de rotor y de la masa de
la góndola) en comparación con el diámetro del rotor utilizado para discutir el
aumento de la densidad de potencia de las turbinas de viento. El par se calcula a
partir de la potencia nominal y la velocidad máxima del rotor. Con diámetros de rotor
de mayor tamaño, aumenta no sólo debido a la creciente potencia nominal, sino
también debido a la velocidad del rotor más pequeño (que limita el criterio de la
máxima velocidad de punta de pala). Hay un aumento significativo del par específico
con los años; en 1996, la zona de cobertura de 10.5 Nm / kg, mientras que en 2002
llegó a 15-20 Nm / kg para las turbinas de viento MW clase de diámetro de más de
60 m de rotor. Esto demuestra que el estrés se acerca a la resistencia del material
admisible, el diseño es más estrés optimizado (en lugar de los factores de alta
seguridad en el inicio) y se aplican también que los nuevos materiales. Además, los
aumentos de densidad de potencia si los generadores y cajas de cambios son más
compactos debido, por ejemplo una mejor refrigeración y electrónica de potencia
avanzada. Las turbinas de viento son cada vez (específicamente) más ligero y más
rentable.
Fig. 65- Masa específica barquilla versus diámetro del rotor
Fig. 66- Torsión versus diámetro del rotor
66
El rendimiento energético de las turbinas de viento es básicamente de sitio
específico. Con el fin de obtener valores comparables, el rendimiento de referencia
se introduce y se define por las condiciones del viento especificadas en la Ley de
Energías Renovables alemana (EEG) de abril de 2002 como sigue:
La media de la velocidad del viento en 30 m de altura: 5,5 m / s
La rugosidad z longitud0: 0,1 m
Distribución de frecuencia del viento de acuerdo con Rayleigh: k = 2
La ley establece un sitio alemán medio virtual con aprox. 1.700 horas anuales de
carga completa como la base para la comparación de aerogeneradores. Este es, por
ejemplo equivalente a sitios moderadamente viento en el estado federal alemán de
Brandenburgo.
La Fig. 67 muestra que con el aumento del tamaño de la turbina (es decir, con los
años) el rendimiento específico de área de referencia (relación de rendimiento de
referencia y barrió área de rotor) creció en más de 50%, a partir de aprox. 600
kWhun/ M² aprox. 1.000 kWhun/ M². La difusión de los valores depende no sólo del
tipo de turbina y el fabricante, sino también según el tipo en las diferentes alturas de
buje disponibles. El aumento alcanzado es debido principalmente a las alturas de
buje de crecimiento que proporcionan mejores condiciones de viento para el
funcionamiento de la turbina.
Fig. 67- Área especifica
Considerando en Fig. 68 la mejor eficiencia de las turbinas de viento, es decir, el
coeficiente de potencia cP.max, Elaborado a partir de las curvas de potencia
medidos para la homologación, una amplia difusión de los valores se puede
observar. La razón de esto es el amplio rango de operación de las turbinas de
viento. Por lo tanto, los fabricantes de optimizar toda la máquina para una amplia
gama de eficiencia relativamente alta. Esto es necesario especialmente para los
sitios del interior con el fin de maximizar el rendimiento energético anual:
67
por un lado, los vientos débiles muy frecuentes tienen que ser cosechados de
manera eficiente, pero por el otro una buena eficiencia también debe aportar una
cuota de alto rendimiento de los fuertes vientos más raras (P ~ v³!).
La consideración final, la Fig. 69 discute aerogeneradores comerciales disponibles
referentes a los dos conceptos clásicos de la limitación de la potencia: Parada y
cabeceo. Se muestra una clara tendencia a apartarse de una dominación de las
turbinas de parada controlada (sin cuchilla de pitcheo) hasta mediados de la
década de 1990 a una preferencia por el viento control del paso de turbinas
evidente en las turbinas de la clase MW actuales. En Alemania, casi no los
aerogeneradores de puestos se han instalado recientemente, debido
principalmente a los estrictos códigos de red.
En el primer semestre de 2005, por ejemplo, sólo las turbinas de viento de tono
controlado se erigieron, de los cuales el 10% tenía una regulación por pérdida
aerodinámica activa.
Sin embargo, en otros países con una situación de mercado diferente y las
condiciones de transporte y erección más restringidas, hay una gran demanda de
las turbinas de puesto probadas robustas y bien. Incluso la empresa ENERCON,
un fabricante clásico de las turbinas de viento de tono controlado sin engranajes,
ahora pone a prueba un prototipo de 20 kW con limitación de potencia de entrada
en pérdida. Y también el viento turbina de 5 kW AeroSmart 5, la Fig. 57 izquierda,
recientemente desarrollado para sistemas autónomos y los países en desarrollo,
tiene un rotor viento abajo con el control de entrada en pérdida.
68
Fig. 68- Coeficiente máximo de potencia
Fig. 69- Número de puesto disponible y tipos de turbina de viento echada
en el mercadoalemán
69
2.0 Aerodinámica de Turbinas de viento
2.1 Descripción General
La producción de potencia de la turbina depende de la interacción entre el rotor y el
viento. El viento puede ser considerado como una combinación del viento media y
las fluctuaciones turbulentas de ese flujo. Se ha demostrado que los principales
aspectos del desempeño de la turbina de viento (media potencia y cargas medias)
están determinados por las fuerzas aerodinámicas generadas por el viento medio.
Fuerzas aerodinámicas periódicas causadas por la cizalladura del viento, vientos
fuera del eje, y la rotación del rotor y las fuerzas fluctuantes inducidos por la
turbulencia y efectos dinámicos son la fuente de cargas de fatiga y son un factor en
los picos de carga experimentadas por una turbina de viento. Estos son, por
supuesto, importantes.
Prácticos ejes horizontales diseños de turbinas de viento de eje usan superficies
de sustentación para transformar la energía cinética del viento en energía útil.
2.2 Teoría Momentum unidimensional y el límite de Betz
Un modelo simple, generalmente atribuido a Betz (1926), se puede utilizar para
determinar la potencia de un rotor de turbina ideal, el empuje del viento sobre el
rotor ideal, y el efecto de la operación del rotor en el campo de viento local. Este
modelo simple se basa en una teoría de movimiento lineal desarrollada hace más de
100 años para predecir el rendimiento de hélices de los barcos.
El análisis supone un volumen de control, en el que los límites de volumen de control
son la superficie de un tubo de corriente y dos secciones transversales del tubo de
flujo (véase la Figura 70). El único flujo es a través de los extremos del tubo de
corriente. La turbina está representado por un " accionador de disco” uniforme que
crea una discontinuidad de presión en el tubo de corriente de aire que fluye a través
de él. Tenga en cuenta que este análisis no se limita a ningún tipo particular de
turbina de viento.
Este análisis utiliza los siguientes supuestos:
Homogénea, incompresible, fluido caudal estacionario;
No arrastre por fricción;
70
Fig. 70 modelo de disco actuador de una turbina de viento; U, significa la velocidad del
aire; 1, 2, 3, y 4 indican ubicaciones
Un número infinito de cuchillas
Empuje uniforme sobre el área del disco o rotor;
Una estela no giratorio;
La presión estática medida aguas arriba y lejos aguas abajo del rotor es igual
a la presión estática ambiente no perturbado
La aplicación de la conservación del momento lineal para el volumen de control que
encierra todo el sistema, uno puede encontrar la fuerza neta sobre el contenido del
volumen de control. Esa fuerza es igual y opuesto al empuje, T, que es la fuerza del
viento en la turbina eólica. De la conservación del momento lineal para un flujo
invariante en el tiempo unidimensional, incompresible, el empuje es igual y opuesto
a la velocidad de cambio de impulso de la corriente de aire:
𝑻 = 𝑼𝟏 (𝝆𝑨𝑼)𝟏 − 𝑼𝟒 (𝝆𝑨𝑼)𝟒
Ecu. 3
Donde r es la densidad del aire, A es el área de sección transversal, U es la
velocidad del aire, y los subíndices indican valores en secciones transversales
numeradas en la Figura 1.
para el flujo de estado estable, (ρAU)1 = (ρAU)4 = ṁ, Donde ṁ Es la tasa de flujo de
masa. Por lo tanto:
𝑻 = ṁ (𝑼𝟏 − 𝑼𝟒 )
Ecu. 4
La idea central es positiva por lo que la velocidad detrás del rotor, U4, Es menor que
la velocidad de la corriente libre, U1. Ningún trabajo se hace a ambos lados del rotor
de la turbina. Así, la función Bernoulli se puede utilizar en los dos volúmenes de
71
control a cada lado del disco actuador. En el tubo de aguas arriba corriente del disco:
𝒑𝟏 +
𝟏
𝟐
𝝆𝑼𝟐𝟏 = 𝒑𝟐 +
𝟏
𝟐
𝝆𝑼𝟐𝟐
Ecu. 5
En el tubo de flujo aguas abajo del disco:
𝒑𝟑 +
𝟏
𝟐
𝟏
𝝆𝑼𝟐𝟑 = 𝒑𝟒 + 𝟐 𝝆𝑼𝟐𝟒
Ec.6
Donde se supone que las presiones aguas abajo lejos aguas arriba y lejanos son
iguales
Y que la velocidad a través del disco sigue siendo el mismo (U2 =U3 ).
El empuje también se puede expresar como la suma neta de las fuerzas sobre
cada lado del disco de accionado:
𝑻 = 𝑨𝟐 (𝒑𝟐 − 𝒑𝟑 ) Ecu. 7
Si uno resuelve por (p2 - p3) usando las ecuaciones (3) y (4) y sustitutos que en
La ecuación (5), se obtiene:
𝑻=
𝟏
𝟐
𝝆𝑨𝟐 (𝑼𝟐𝟏 − 𝑼𝟐𝟒 )
Ecu. 8
La equiparación de los valores de empuje de las ecuaciones (2) y (6) y el
reconocimiento de que la tasa de flujo de masa es también ρA2U2, se obtiene:
𝑼𝟐 =
𝑼𝟏 + 𝑼𝟒
𝟐
Ecu. 9
Por lo tanto, la velocidad del viento en el plano del rotor, utilizando este modelo
simple, es el promedio de las velocidades del viento aguas arriba y aguas abajo.
Si se define el factor de inducción axial, una, como la disminución fraccional de la
velocidad del viento entre la corriente libre y el plano del rotor, a continuación
72
𝒂=
𝑼𝟏 − 𝑼𝟐
𝒖𝟏
Ecu.10
𝑼𝟐 = 𝑼𝟏 (𝟏 − 𝒂)
Y
𝑼𝟒 = 𝑼𝟏 (𝟏 − 𝒂)
La cantidad de U1 una se refiere a menudo como la velocidad inducida en el
rotor, en cuyo caso la velocidad del viento en el rotor es una combinación de la
velocidad de la corriente libre y la velocidad del viento inducida. Como el factor de
inducción axial aumenta de 0, la velocidad del viento detrás del rotor
Disminuye más y más. Si una¼ 1 = 2,el viento se ha ralentizado a la velocidad cero
detrás del rotor y la
teoría simple ya no es aplicable.
La salida de potencia, P, es igual a los tiempos de empuje la velocidad en el
disco:
Ecu. 11
Sustituyendo T2y U4a partir de las ecuaciones (3.9) y (3.10) se obtiene:
Ecu.12
Donde el área de volumen de control en el rotor, A2, Se sustituye por A, el área del
rotor, y la velocidad de la corriente libre de U1se sustituye por U.
el rendimiento del rotor de la turbina
coeficiente de potencia, CP:
generalmente se caracteriza por su
Ecu.13
El coeficiente de potencia no dimensional representa la fracción de la potencia en
el viento que se extrae por el rotor. De la ecuación (13), el coeficiente de potencia
es:
73
La máxima CPse determina tomando la derivada del coeficiente de potencia
(La ecuación (14)) con respecto a una y se establece igual a cero, produciendo
una ¼ 1 = 3. Por lo tanto:
Ecu. 14
Cuando una¼ 1 = 3. Para este caso, el flujo a través del disco corresponde a un
tubo de flujo con un área de sección transversal aguas arriba de 2 = 3 el área del
disco que se expande a dos veces el área del disco de aguas abajo. Este resultado
indica que, si un rotor ideales fueron diseñados y operados tal que la velocidad del
viento en el rotor eran 2 = 3 de la velocidad del viento corriente libre, entonces se
estaría operando en el punto de máxima producción de energía. Por otra parte,
dadas las leyes básicas de la física, esto es la potencia máxima posible.
A partir de las ecuaciones (7), (10) y (11), el empuje axial en el disco es:
De manera similar a la potencia, el empuje sobre una turbina eólica puede ser
caracterizado por un coeficiente de empuje no dimensional:
De la ecuación (16), el coeficiente de empuje para una turbina de viento ideal es
igual a 4að1 unÞ.CTtiene un máximo de 1,0 cuando una¼ 0,5 y la velocidad aguas
abajo es cero. A máxima potencia de salida (una¼ 1 = 3),CTtiene un valor de 8 = 9.
Un gráfico de los coeficientes de potencia y de empuje para una turbina ideales Betz
y la velocidad del viento corriente abajo no dimensional izadas.
Como se mencionó anteriormente, este modelo idealizado no es válida para los
factores de inducción axial superior a 0,5. En la práctica (Wilson et al., 1976), ya
que los enfoques factor de inducción axiales y excede 0.5, los patrones de flujo
complicados que no están representados en este sencillo modelo de resultado de
empuje
Los parámetros de funcionamiento de una turbina de Betz; U, velocidad del aire no
perturbado; T4 , Velocidad del aire detrás del rotor; CP, Coeficiente de potencia; CT,
Coeficiente de empuje coeficientes que pueden ir tan alto como 2.0.
El límite de Betz, CP; Max ¼ 16 = 27, es el coeficiente máximo teóricamente
posible de potencia del rotor. En la práctica, tres efectos conducen a una
disminución en la potencia máxima alcanzable
Coeficiente:
La rotación de la estela detrás del rotor.
Número finito de álabes y las pérdidas asociadas con la punta
Cero a la resistencia aerodinámica.
74
Tenga en cuenta que la eficiencia global de la turbina es una función tanto el
coeficiente de potencia del rotor y la mecánica (incluso eléctricas) la eficiencia de la
turbina eólica:
2.3 Turbina de viento del eje Ideal Horizontal con rotación de despertador
utilizando la teoría de momento lineal, se asumió que no se imparte rotación al
flujo. El análisis anterior se puede extender al caso en que el rotor giratorio genera
momento angular, que puede estar relacionado al rotor de par. En el caso de un
rotor de turbina eólica que gira, el flujo detrás del rotor gira en la dirección opuesta
al rotor, en reacción a la par ejercido por el flujo en el rotor. Un modelo de tubo de
corriente anular de este flujo, que ilustra la rotación de la estela, se muestra en la
Figura 71.
Fig. 71 modelo de tubo de corriente de flujo detrás de rotación pala de aerogenerador. Foto
de tubo de corriente con la rotación estela, de Lysen (1982) Reproducido con permiso del
autor
Fig. 72 Geometría para el análisis del rotor; U, velocidad del aire no perturbado; un factor
de inducción en el radio
La generación de la energía cinética de rotación en los resultados de vigilia en
75
menos extracción de energía por el rotor lo que cabría esperar sin rotación estela.
En general, la energía cinética adicional en la turbina de viento estela será mayor si
el par generado es mayor. Por lo tanto, como se muestra aquí, las turbinas de
viento de baja velocidad (con una velocidad de rotación baja y un alto par)
experimentan más pérdidas de rotación estela que las máquinas de viento de alta
velocidad con par bajo.
Figura 72 da un esquema de los parámetros que intervienen en este análisis. Los
subíndices denotan valores en las secciones transversales identificados por
números. Si se asume que la velocidad angular impartida a la corriente de flujo, o,
es pequeña en comparación con la velocidad angular, O, del rotor de la turbina
eólica, a continuación, también se puede suponer que la presión en la estela lejos
es igual a la presión en la corriente libre (véase Wilson et al., 1976). El análisis que
sigue se basa en el uso de un tubo de corriente anular con un radio r y un espesor
dr, resultando en un área de sección transversal igual a 2prdr (véase la Figura 72).
La presión, rotación de raíz y los factores de inducción son todos supone que las
funciones de radio.
Si se utiliza un volumen de control que se mueve con la velocidad angular de las
cuchillas, la ecuación de energía se puede aplicar en las secciones antes y
después de las cuchillas para derivar una expresión para la diferencia de presión a
través de las cuchillas (ver Glauert, 1935 para la derivación) .
2.4 aspas aerodinámicas y conceptos generales de Aerodinámica
Las superficies de sustentación son estructuras con formas geométricas
específicas que se utilizan para generar las fuerzas mecánicas debido al
movimiento relativo de la superficie de sustentación y un fluido circundante. Los
Álabes de la turbina de viento utilizan superficies de sustentación para desarrollar
la energía mecánica. Las secciones transversales de palas de aerogeneradores
tienen la forma de superficies de sustentación. La anchura y la longitud de la hoja
son funciones del rendimiento aerodinámico deseado, la potencia máxima deseada
del rotor, las propiedades aerodinámicas asumidos, y consideraciones de
resistencia. Antes de que los detalles de la producción de energía de turbinas
eólicas se expliquen, conceptos NAMIC relacionados con superficies de
sustentación deben ser discutidos.
2.4.1 Airfoil Terminología
Un número de términos se utilizan para caracterizar una superficie de sustentación,
como se muestra en la Figura 73. La línea de curvatura media es el lugar
geométrico de puntos a mitad de camino entre las superficies superior e inferior de
la superficie de sustentación. Los más delantera y trasera puntos de la línea media
de inclinación están en los bordes delanteros y traseros, respectivamente. La línea
recta que conecta los bordes delantero y trasero es la línea de la cuerda del perfil
aerodinámico, y la distancia desde la que conduce al borde de salida medida a lo
largo de la línea de la cuerda se designa el acorde, c, de la superficie de
sustentación.
El ángulo de caída es la distancia entre la línea de curvatura media y la línea de la
76
cuerda, medida perpendicularmente a la línea de la cuerda. El grosor es la
distancia entre las superficies superior e inferior, también medidos perpendicular a
la línea de la cuerda. Finalmente, el ángulo de ataque, a, se define como el ángulo
entre el viento relativo (Urel) Y la línea de la cuerda.
Fig. 73- Nomenglatura
No se muestra en la figura es el lapso de la superficie de sustentación, que es la
longitud de la superficie de sustentación perpendicular a su sección transversal.
Los parámetros geométricos que tienen un efecto sobre el rendimiento
aerodinámico de un perfil aerodinámico incluyen: el radio del borde de ataque,
significa línea de curvatura, de espesor máximo y la distribución del espesor del
perfil, y el ángulo de borde de salida.
2.4.2 Levante, Parámetros Arrastre y No-dimensionales
Flujo de aire sobre una superficie de sustentación produce una distribución de
fuerzas sobre la superficie aerodinámica. La velocidad del flujo a través de
superficies de sustentación aumenta sobre la superficie convexa que resulta en
una menor presión media de la cara 'aspiración' de la superficie aerodinámica en
comparación con el lado cóncavo o "presión" de la superficie de sustentación.
Mientras tanto, la fricción viscosa entre el aire y la superficie aerodinámica ralentiza
el flujo de aire hasta cierto punto próximo a la superficie.
77
Fig.74 Fuerzas y momentos en una sección de perfil aerodinámico, un ángulo de ataque;
c, de acordes. La dirección de las fuerzas positivas y momentos se indica mediante la
dirección de la flecha
Como se muestra en la figura 74, la resultante de todas estas fuerzas de presión
y fricción es generalmente dividido en dos fuerzas y un momento que actúan a lo
largo de la cuerda a una distancia de c = 4 desde el borde delantero (en el 'cuarto
acorde'):
Fuerza de elevación - define para ser perpendicular a la dirección del flujo de
aire en sentido contrario. La fuerza de elevación es una consecuencia de la
presión desigual sobre las superficies de la superficie de sustentación
superior e inferior.
Fuerza de arrastre - define para ser paralelo a la dirección del flujo de aire en
sentido contrario. La fuerza de arrastre es debido tanto a las fuerzas de
fricción viscosa en la superficie de la superficie de sustentación y a una
presión desigual sobre las superficies aerodinámicas orientada hacia y desde
el flujo en sentido contrario.
Momento de cabeceo - define para ser alrededor de un eje perpendicular a la
sección transversal de perfil aerodinámico.
Teoría y la investigación han demostrado que muchos problemas de flujo pueden
caracterizarse por parámetros dimensionales no. El parámetro adimensional más
importante para definir las características de las condiciones de flujo de fluido es el
número de Reynolds. El número de Reynolds, Re, se define por:
Ecu. 15
78
Donde r es la densidad del fluido, m es la viscosidad del fluido, n¼ m = r es la
viscosidad cinemática, y U y L son una velocidad y duración que caracterizan a la
escala del flujo. Estos podrían ser el entrante velocidad de la corriente, Tviento, Y la
longitud de cuerda en una superficie de sustentación. Por ejemplo, si U viento es 65
m / s, n es
0.000013 m2/ S y la longitud de la cuerda es 2 m, el número de Reynolds es de 10
millones.
La fuerza no dimensionalizadas y momento coeficientes adicionales, que son
funciones del número de Reynolds, se pueden definir para los objetos de dos o tres
dimensiones, en base a pruebas en el túnel de viento. Superficies aerodinámicas
tridimensionales tienen una vida finita y coeficientes de fuerza y de momento se
ven afectadas por el flujo alrededor del extremo de la superficie de sustentación.
Los datos de la superficie de sustentación de dos dimensiones, por otro lado, se
supone que tienen un lapso infinito (sin efectos finales). Datos de dos dimensiones
se miden de tal manera que efectivamente existe ningún flujo de aire alrededor del
extremo de la superficie de sustentación en la sección de prueba. Fuerza y
momento coeficientes de flujo alrededor de objetos de dos dimensiones suelen ser
designados con un subíndice minúsculo, como en Cdpara el coeficiente de arrastre
de dos dimensiones. En ese caso, las fuerzas medidas son fuerzas por tramo
unidad. Sustentación y resistencia coeficientes que se miden para el flujo alrededor
de objetos tridimensionales suelen ser designados con un subíndice de
mayúsculas, como
En CD. Diseño de rotor generalmente utiliza coeficientes de dos dimensiones,
determinadas para una gama de ángulos de ataque y números de Reynolds, en las
pruebas en túnel de viento. El coeficiente de sustentación de dos dimensiones se
define como
Ecu. 16
El coeficiente de arrastre de dos dimensiones se define como:
Ecu.17
Y el coeficiente de cabeceo es:
Ecu. 18
79
2.4.3 flujo sobre una superficie de sustentación
Las fuerzas de arrastre son el resultado tanto de la distribución de presión sobre la
superficie de sustentación y la fricción entre el flujo de aire y la superficie de
sustentación. El componente de la distribución de la presión neta en la dirección de
los resultados de flujo de aire en el arrastre debido a la presión. Arrastre debido a la
fricción es una función de la viscosidad del fluido y disipa la energía en el campo de
flujo.
Arrastre también hace que el desarrollo de dos regiones diferentes de flujo: uno más
lejos de la superficie aerodinámica, donde los efectos de fricción son despreciables y
la capa límite, justo al lado de la superficie aerodinámica, donde los efectos de
fricción dominan. En la capa límite, la velocidad aumenta desde cero en la superficie
aerodinámica a la del flujo libre de fricción fuera de la capa límite. La capa límite en
una pala de turbina eólica puede variar en espesor de un milímetro a decenas de
centímetros.
El flujo en la capa límite puede ser laminar (suave y constante) o turbulento
(irregular con vórtices tridimensionales). En el borde de ataque de la superficie
aerodinámica, el flujo es laminar. Por lo general, en algún punto aguas abajo, el flujo
en la capa límite se vuelve turbulento como la interacción entre la viscosidad y las
fuerzas de inercia no lineales provoca una "transición" a, flujo turbulento caótico.
Capas límite laminares dan lugar a fuerzas mucho más bajos de fricción que hacer
capas límite turbulentas.
El gradiente de presión del flujo tiene un efecto significativo en la capa límite, como
se ilustra en la Figura 75. Eso gradiente de presión puede ser un gradiente de
presión favorable (positivo en la dirección del flujo) o un gradiente de presión
adverso (contra el flujo). Flujo en la capa límite se acelera o decelera por el
gradiente de presión. En la capa límite, el flujo también se ralentiza por la fricción de
la superficie. Así, en un gradiente de presión adverso y con la ayuda de la fricción
superficial, el flujo en la capa límite se puede detener o puede invertir la dirección.
Esto resulta en el flujo se separe de la superficie de sustentación, causando una
condición llamada pérdida de sustentación. Capas límite que ya han hecho la
transición a flujo turbulento son menos sensibles a un gradiente de presión adverso
que son capas límite laminares, pero una vez que el laminar o capa límite turbulenta
se ha separado de la superficie de sustentación, el ascensor gotas. Una superficie
aerodinámica sólo puede producir de manera eficiente levante mientras las
distribuciones de presión de superficie pueden ser soportadas por la capa límite.
80
Fig. 75- Efectos favorables (decreciente) y negativos (incremento) gradientes de presión de
la Capa límite
2.4.4 Comportamiento Airfoil
Es útil considerar el flujo alrededor de un cilindro como un punto de partida para
buscar en superficies de sustentación. El flujo puede ser mejor visualizada con la
ayuda de líneas de corriente. Una línea de corriente puede ser pensado como el
camino que una partícula tomaría si se colocan en un fluido que fluye. Un campo
de flujo puede entonces ser representada en términos de un número de líneas de
corriente. Agiliza tienen algunas propiedades visualmente interesantes. Por
ejemplo, las líneas de corriente convergen, que indican un aumento en la velocidad
y una disminución en la presión. Lo opuesto es el caso de las líneas de corriente
divergente. También es el caso que la ecuación de Bernoulli es estrictamente
aplicable sólo a lo largo de líneas de corriente. Figura 76 (a) ilustra un flujo de
alrededor de un cilindro estacionario. En este caso el flujo asume que no hay
arrastre y no inercia. Se puede observar que las líneas de corriente se mueven
más cerca juntos a medida que pasan el cilindro. Esto indica que la velocidad
aumenta y la presión está disminuyendo. El patrón es simétrica en ambos lados del
cilindro, por lo que no hay ascensor neto sobre el cilindro. De hecho, en ausencia
de arrastre viscoso no hay fuerza neta en absoluto en el cilindro en esta situación.
Cuando hay flujo de rotación, sin embargo, la situación cambia. La rotación de
fluido puede ser provocada tanto por la rotación de un objeto en el flujo, o puede
resultar de la forma del objeto (tal como una superficie de sustentación), que
imparte un movimiento rotacional al fluido.
Fig. 76- (a) fluya alrededor del cilindro estacionario; (b) fluya alrededor de rotación del
cilindro(CCW)
81
2.5 Diseño de la hoja de modernas turbinas de viento
2.5.1 Entorno Operativo Cuchilla
Alabes de la turbina deben ser diseñados para convertir la energía cinética del
viento en el par, mientras que tiene propiedades estructurales que aseguran la
resistencia estática y la fatiga requerida para una larga vida operativa. Además,
deben tener los costos de materiales y de fabricación suficientemente bajo para que
el sistema total de la turbina de viento puede ser aceptado en el mercado.
El punto de partida para el diseño de pala de turbina eólica asume flujo axial
uniforme aguas arriba de la turbina de viento de flujo de dos dimensiones sobre las
cuchillas y las condiciones de funcionamiento de estado estacionario, todo bajo
condiciones aerodinámicas de diseño específicas definidas por la relación entre la
velocidad de rotación del rotor y la velocidad del viento entrante. Por ejemplo, un
rotor puede estar diseñado para operar a una velocidad del viento de 12 m / s y
una velocidad de rotación de 20 revoluciones por minuto. Las hojas también
operarán en muchas otras condiciones, incluidas las condiciones fuera de diseño,
con el flujo no uniforme y en condiciones de estado no estacionario. Off-diseño de
las condiciones de operación incluyen la operación en otras relaciones de
velocidad de giro y la velocidad del viento. Dependiendo del sistema de control,
que puede funcionar a 15 revoluciones por segundo bajo algunas condiciones a
una velocidad del viento de 5 m / s o a 20 revoluciones por minuto con una
velocidad del viento de entrada de 22 m / s. La rotación del rotor también induce el
flujo a lo largo de la hoja, haciendo que el flujo tridimensional, especialmente cerca
del hub. Condiciones de flujo no uniformes incluyen operación con la cizalladura del
viento a través del rotor, o con el rotor guiñó parcialmente fuera del viento o en
condiciones de flujo inclinados sobre una ladera de la montaña (ejemplos de fuera
del eje flujos). Los estados no estables de operación incluyen la operación en la
capa límite turbulento en la que la velocidad y dirección del viento en el rotor están
variando en el tiempo y el espacio. Condiciones no constantes adicionales son
inducidas por la rotación del rotor que provoca las aerodinámicas variables en el
tiempo debido a la cizalladura, los flujos de fuera del eje.
2.6 predicción del rendimiento del aspa general del rotor
En general, un rotor no es de la forma óptima debido a las dificultades de
fabricación. Además, cuando una cuchilla 'óptima' se realiza a una proporción de
velocidad de punta diferente de aquel para el que está diseñado, ya no es "óptimo".
Por lo tanto, las formas de cuchillas deben estar diseñados para una fácil fabricación
y para el rendimiento general en todo el rango de velocidades del viento y del rotor
que van a encontrar. Al considerar las cuchillas no óptimas, uno generalmente utiliza
un enfoque iterativo. Es decir, se puede suponer una forma de la hoja y predecir su
rendimiento, pruebe con otra forma y repetir la predicción hasta que se haya elegido
una hoja adecuada.
82
Hasta ahora, la forma de la hoja para un rotor ideal sin rotación estela ha sido
considerada. En esta sección, se considera el análisis de formas arbitrarias de la
hoja. El análisis incluye la rotación de estela, arrastrar pérdidas por un número finito
de álabes, y rendimiento fuera de diseño. En secciones posteriores estos métodos
se pueden utilizar para determinar una forma óptima cuchilla, incluida la rotación de
estela, y como parte de un procedimiento de diseño de rotor completo.
2.6.1 Aerogenerador Estados de Flujo
Rendimiento de la turbina del viento medida se aproxima mucho a los resultados
de la teoría de BEM en valores bajos del factor de inducción axial. Momentum
teoría ya no es válida en los factores de inducción axiales superiores a 0,5, debido
a que la velocidad del viento en la estela ahora sería negativo. En la práctica, como
los axiales aumentan el factor de inducción por encima de 0,5, los patrones de flujo
a través de la turbina eólica se vuelven mucho más complejos que los predichos
por la teoría de impulso. Un número de estados de funcionamiento para un rotor
han sido identificados (ver Eggleston y Stoddard, 1987). Los estados de
funcionamiento correspondientes a las turbinas de viento se designan el estado del
molino de viento y el estado estela turbulenta. El estado del molino de viento es el
estado de funcionamiento de la turbina de viento normal. El estado estela
turbulenta se produce en virtud de la operación en los vientos fuertes. El estado del
molino de viento se caracteriza por el flujo
Fig. 77 Múltiples soluciones: una, el ángulo de ataque; Cl , Coeficiente de
sustentación de dos dimensiones
2.7 Forma de la hoja de Optimum Rotor con rotación de despertador
La forma de la hoja para un rotor ideal que incluye los efectos de la rotación estela
puede ser determinada utilizando el análisis desarrollado para un rotor general. Esta
optimización incluye la rotación de estela, pero ignora arrastre (CD¼ 0) Y las
pérdidas de punta (F¼ 1). Se puede realizar la optimización tomando la derivada
parcial de la parte de la integral para CP(La ecuación (3.91)), que es una función de
el ángulo del viento relativo, j, y se establece igual a cero, es decir:
83
Estos resultados se pueden comparar con el resultado de una cuchilla ideal sin
rotación estela, para el cual, a partir de las ecuaciones
Ecua. 25
Ecua. 26
Tenga en cuenta, que los valores óptimos para j y C, incluyendo la rotación de
atención, a menudo son similares a, pero podrían ser significativamente diferentes
de los obtenidos sin asumir rotación estela. También, como antes, seleccione una
en la que Cd = Cles mínima.
La solidez es la relación del área de forma en planta de las cuchillas en el área de
barrido, así:
Ecu. 27
El rotor solidez óptima cuchilla se puede encontrar a partir de los métodos
discutidos anteriormente. Cuando la hoja se modela como un conjunto de N
secciones de pala de igual lapso, la solidez se puede calcular a partir de:
84
Ecu. 28
Las formas de hoja de tres rotores óptimos de muestra, asumiendo rotación
estela, se dan en la Tabla 5. Aquí Cl lse supone que es 1,00 en el ángulo de diseño
de ataque. En estos rotores, el giro cuchilla está directamente relacionada con el
ángulo del viento relativo debido a que el ángulo de ataque se supone que es
constante Por lo tanto, los cambios en la hoja de giro reflejarían
TABLA 5
2.8 procedimiento de cálculo de rendimiento desubidad HAWT Rotor
Manwell (1990) propuso un método simplificado para calcular el rendimiento de un
rotor de la turbina eólica de eje horizontal que es particularmente aplicable para un
rotor unstalled, pero también puede ser útil en determinadas condiciones de
pérdida. El método utiliza la teoría elemento de hoja descrito anteriormente e
incorpora un método analítico para encontrar el ángulo de la hoja de ataque.
Dependiendo de si se incluyen las pérdidas de punta, se requieren pocos o ningún
iteraciones. El método supone que se aplican dos condiciones:
La sección de perfil aerodinámico coeficiente de sustentación vs. ángulo de
ataque debe ser relación lineal en la región de interés.
El ángulo de ataque debe ser lo suficientemente pequeño que las
aproximaciones de ángulo pequeño pueden ser utilizados.
Estos dos requisitos se aplican normalmente si la sección es unstalled. También
pueden aplicarse bajo ciertas condiciones parcialmente estancadas para ángulos
85
moderados de ataque si la curva de elevación se puede linealizar.
El método simplificado es el mismo que el Método 1 esbozó anteriormente, con la
excepción de una
simplificaciónpara la determinación del ángulo de ataque y el coeficiente de
sustentación para cada sección de la hoja. La esencia del método simplificado es el
uso de un (forma cerrada) expresión analítica para encontrar el ángulo de ataque
del viento relativo en cada elemento de la cuchilla. Se supone que las curvas de
elevación y arrastre pueden ser aproximadas por:
𝑪𝟏 = 𝑪𝟏,𝟎 + 𝑪𝟏,𝜶 𝜶
Ecu. 29
𝑪𝒅 = 𝑪𝒅,𝜶𝟏 𝜶 + 𝑪𝒅,𝜶𝟐 𝜶𝟐
Ecu. 30
Cuando la curva de elevación es lineal y cuando se pueden utilizar
aproximaciones de ángulo pequeño, se puede demostrar que el ángulo de ataque
está dada por:
Ecu. 31
Donde:
Ecu. 32
Fig. 78 Comparación de los métodos de cálculo para el elemento de una hoja; un factor de
inducción axial, Coeficiente de sustentación de dos dimensiones
86
Ecu. 33
2.9 efecto de arrastre y el número de hoja en unrendimiento óptimo
Al comienzo del capítulo, el máximo teóricamente posible coeficiente de potencia
para turbinas eólicas se determinó como una función de la relación de velocidad de
la punta. Como se explica en este capítulo, de arrastre y de perfil aerodinámico de
punta pérdidas que son una función del número total de hojas de reducir los
coeficientes de potencia de las turbinas de viento. El coeficiente de potencia
máxima alcanzable para turbinas con una forma de la hoja óptima pero un número
finito de cuchillas y la resistencia aerodinámica se ha calculado por Wilson
Fig. 79- Coeficientes de
la potencia máxima alcanzable en función del número de hojas, nadade arrastre
Ecu. 34
2.10 Problemas computacionales y aerodinámicos en Aerodinámico Diseño
El rendimiento aerodinámico de las turbinas eólicas es principalmente una función
de la aerodinámica de estado estacionario discutidos anteriormente. El análisis
presentado en este capítulo se proporciona un método para la determinación de
cargas medias en una turbina de viento.
87
Hay, sin embargo, una serie de efectos en el estado estacionario y dinámicas
importantes que causa aumento de las cargas o disminuir la producción de energía
de los esperados con la teoría BEM aquí se presenta, sobre todo aumento de las
cargas transitorias. Una visión general de estos efectos se proporciona en esta
sección, incluidos los efectos no ideales de estado estacionario, la influencia de la
turbina se despierta, y la aerodinámica inestable. Esta sección también incluye
comentarios sobre los programas de ordenador que se pueden utilizar para modelar
el rendimiento del rotor y enfoques para el modelado de la aerodinámica del rotor
que no sean métodos BEM.
2.11 La aerodinámica de Eje Vertical Aerogeneradores
2.11.1 Descripción general
Como se discutió previamente en el Capítulo 1, los rotores de turbina eólica puede
rotar alrededor de ya sea horizontal o de un eje vertical. Aunque la mayoría de las
turbinas eólicas han sido históricamente del eje horizontal Tipo, máquinas de eje
vertical se han utilizado en algunas situaciones de interés. En esta sección se ofrece
una breve visión general de las turbinas de eje vertical y un resumen de los
aspectos clave de su aerodinámica. Las turbinas eólicas de eje vertical (VAWTs)
pueden tener cualquiera de los rotores impulsados por levantar arrastrar o
impulsado. El eje vertical de la turbina de arrastrar impulsado más común es el rotor
Savonius. Se ha utilizado para el bombeo de agua y otras aplicaciones de alto
torque. El argumento a favor de las turbinas de rotor Savonius es que pueden ser
relativamente barato de construir. En la práctica, en virtud de ser una máquina de
arrastrar impulsado, tienen coeficientes de potencia intrínsecamente bajos. Además,
tienen una solidez acercarse a 1,0, por lo que son muy pesados respecto a la
potencia que producen. Son también difíciles de proteger de posibles daños en los
vientos fuertes.
Cuando turbinas de eje vertical se han utilizado para la generación de energía
eléctrica casi siempre han utilizado rotores de elevación de motor. Normalmente,
estos rotores han tenido uno de los dos tipos de la configuración: hojas rectas o
cuchillas curvadas con una forma troposkein. El último tipo de rotor se conoce
como el rotor Darrieus. Algunos rotores con palas rectas han incorporado un
mecanismo de pitcheo, pero la mayoría de las turbinas de eje vertical de elevación
impulsadas han palas de paso fijo. Por lo tanto, la limitación de potencia en vientos
fuertes se logra estancamiento.
La principal ventaja de los rotores de eje vertical es que no requieren
mecanismos especiales de guiñada en el viento. Otra ventaja es que, puesto que
las cuchillas son generalmente sin torsión y de cuerda constante, las cuchillas se
pueden hacer por masa de extrusión de producción.
En la práctica, turbinas de eje vertical no se han utilizado tan ampliamente como
tener turbinas de eje horizontal. Las razones tienen que ver con el equilibrio entre
algunos de los beneficios y las limitaciones intrínsecas. Por la naturaleza de la
aerodinámica del rotor, las cargas estructurales en cada cuchilla varían en gran
medida durante cada rotación.
88
Tales cargas contribuyen al daño de alta fatiga y requieren que las cuchillas y las
articulaciones a sí mismos tienen un ciclo de vida muy largo. Además, las turbinas
de eje vertical no se prestan a ser apoyado por una, torre separada. Esto significa
que una gran fracción del rotor tiende estar situado cerca de la tierra en una región
de relativamente baja viento. La productividad puede entonces ser menor que la de
una máquina de eje horizontal de la potencia nominal equivalente, pero en una
torre más alta.
2.11.2 La aerodinámica de una recta de punta Turbina de eje vertical
El siguiente análisis se aplica a una turbina eólica de eje vertical recta de punta. La
primera sección se refiere a un método único tubo de corriente de análisis y sigue
el enfoque de de Vries (1979). La segunda sección resume el método de tubos
múltiples corriente. Esto es seguido por una breve discusión del método de tubo de
corriente múltiple doble. El rotor Darrieus puede ser modelado con una
modificación de los métodos de cuchilla recta. En ese caso, las cuchillas se dividen
en secciones, y los efectos de las diferentes distancias de las secciones de eje de
rotación se tienen en cuenta.
2.11.2.1 Individual Análisis Tubo Corriente
Una sola pala de una turbina eólica de eje vertical, visto desde arriba, se ilustra en la
Figura 80. En la figura se muestra la cuchilla que gira en la dirección contraria a las
agujas del reloj, y el viento se ve que incide sobre el rotor de izquierda a derecha.
Como es típico en las turbinas eólicas de eje vertical, la superficie de sustentación
es simétrica. La cuchilla está orientada de modo que la línea de la cuerda es
perpendicular al radio del círculo de rotación. El radio que define la posición angular
de la cuchilla (normalmente el cumplimiento de la línea de la cuerda en el trimestre
acorde) forma un ángulo de f con la dirección del viento, como se muestra en la
figura.
Fig. 80 ilustra los componentes del viento que actúa sobre la cuchilla.
89
Como puede verse, un componente debido a la rotación es tangencial al círculo
de rotación, y por lo tanto paralela a la línea de la cuerda del perfil aerodinámico.
Un componente del viento también actúa tangencialmente. Otro componente de
viento es normal al círculo, y así perpendicular a la superficie de sustentación. Un
factor de inducción, A, representa la desaceleración en el viento a medida que
pasa a través del rotor.
La velocidad relativa al elemento de hoja, según el teorema de Pitágoras, es:
Esto puede ser reescrita como:
Fig. 81 Componentes del viento que actúa sobre un álabe de turbina de eje
vertical
2.11.3 Aerodinámica del rotor Darrieus
El rotor Darrieus se puede analizar con cualquiera de los métodos individuales o
múltiples tubo de corriente descritos anteriormente. Las principales diferencias
tienen que ver con (1) la orientación de los elementos de cuchilla, que ahora son
diferentes entre sí, y (2) la distancia de los elementos de cuchilla desde el eje de
rotación, que no es constante en la longitud de la cuchillas. Continuación del
debate de rotor Darrieus aerodinámica está más allá del alcance de este libro
90
Fig. 82
91
3.0 MECANICA Y DINAMICA
3.1 Antecedentes
La interacción de las fuerzas del ambiente externo, principalmente debido al viento,
y los movimientos de los diversos componentes de la turbina de viento, como
resultado no sólo en la producción de energía deseado a partir de la turbina, sino
también en tensiones en los materiales constituyentes. Para el diseñador de
turbinas, estas tensiones son de interés primordial, porque afectan directamente la
fuerza de la turbina y cuánto tiempo va a durar.
Para decirlo en pocas palabras, con el fin de ser un competidor viable para el
suministro de energía, una turbina eólica se debe:
Producir energía
Sobrevivir
Ser rentable.
Esto significa que el diseño de la turbina no sólo debe ser funcional en términos
de extracción de energía. También debe ser estructuralmente sólida para que
pueda soportar las cargas que experimenta, y los costos para que sea
estructuralmente sólida deben estar en proporción con el valor de la energía que
produce.
El propósito de este capítulo es analizar el marco mecánico dentro de la cual la
turbina debe ser diseñada si se va a cumplir con estos tres requisitos. El capítulo
consta de cuatro secciones, más allá de este fondo. Sección 3.2 ofrece una visión
general de las cargas de aerogeneradores. Sección 3.3 ofrece un resumen de los
principios fundamentales de la mecánica de interés para las turbinas de viento.
Sección 3.4 ofertas de forma más directa con los movimientos de turbinas de
viento, fuerzas y tensiones. Sección 3.5 se describen algunos de los métodos más
detallados utilizados para analizar la respuesta estructural de la turbina eólica.
Sección 3.3 incluye una breve visión general de los conceptos básicos: la estática,
la dinámica y resistencia de los materiales. Esta visión general es breve, ya que se
asume que el lector ya tiene cierta familiaridad con los conceptos involucrados. Una
discusión un poco más larga, sin embargo, está dedicado a algunos conceptos de
especial relevancia.
3.2 Cargas de turbinas de viento
En esta sección se ofrece una visión general de las cargas de aerogeneradores:
los tipos de cargas, sus fuentes y sus efectos.
3.2.1 Tipos de Cargas
En este capítulo, el término "carga" se refiere a las fuerzas o momentos que
92
pueden actuar sobre la turbina.
Las cargas que una turbina puede experimentar son de interés primordial en la
evaluación de los requisitos estructurales de la turbina. Estas cargas
Las características clave de estas cargas y algunos ejemplos de las turbinas de
viento se resumen a continuación.
Las Cargas se pueden dividir en cinco tipos:
De equilibrio (estático y rotativo)
Cíclico
Transitorio (incluyendo impulsivo)
Estocástico
Carga inducida por resonancia.
1. Cargas Constantes:
Las Cargas constantes son los que no varían durante un período de tiempo
relativamente largo. Estas pueden ser o bien estáticas o giratorias. Las cargas
estáticas, tal como se utiliza en este texto, se refieren a cargas no varían en el
tiempo que inciden en una estructura que no se mueve. Por ejemplo, un viento
constante que sopla en un aerogenerador parado induciría cargas estáticas en las
distintas partes de la máquina. En el caso de cargas de rotación constante de la
estructura puede estar en movimiento. Por ejemplo, un viento constante que sopla
en un rotor de turbina de viento que gira mientras se está generando energía podría
inducir presiones continuas sobre las hojas y otras partes de la máquina.
2. Las cargas cíclicas:
Cargas cíclicas son aquellas que varían de una manera regular o periódica. El
término se aplica particularmente a las cargas que surgen debido a la rotación del
rotor. Las Cargas cíclicas surgen como resultado de factores tales como el peso de
las palas, la cizalladura del viento, y el movimiento de guiñada. Cargas cíclicas
también pueden estar asociados con la vibración de la estructura de la turbina o
algunos de sus componentes.
3. Cargas Transitorias
Las Cargas Transitorias son cargas variables en el tiempo que surgen en respuesta
a algún evento externo temporal. Puede haber algunas oscilaciones asociadas con
la respuesta transitoria, pero finalmente decaen. Ejemplos de cargas transitorias
son aquellos que ocurren en el tren de transmisión al aplicar el freno.
Las Cargas impulsivas son cargas variables transitorias en el tiempo de duración
relativamente corta, pero quizás de una magnitud pico significativa. La fuerza sobre
un amortiguador de balanceo cuando se excede el rango normal de balanceo es un
ejemplo de una carga impulsiva
93
4. Cargas estocásticos
Las Cargas estocásticos son variables en el tiempo, al igual que el cíclico, transitoria,
y cargas impulsivas. En este caso, la carga varía de una manera más aparentemente
aleatoria. En muchos casos, el valor medio puede ser relativamente constante, pero
puede haber fluctuaciones significativas de esa media. Los ejemplos de cargas
estocásticas son aquellas que surgen debido a la turbulencia en el viento.
5. Cargas resonancia inducida
Las Cargas inducidas por resonancia son cargas cíclicas que resultan de la
respuesta dinámica de una parte cuando la turbina eólica se excita a una de sus
frecuencias naturales. Ellos pueden alcanzar altas magnitudes.
3.2.2 Fuentes de Cargas
Hay cuatro fuentes primarias de cargas a considerar en el diseño de la
turbina de viento:
La aerodinámica
Gravedad
Interacciones dinámicas
Control mecánico.
A continuación se describe brevemente cada una de estas fuentes.
1. Aerodinámica
La primera fuente de cargas de aerogeneradores que uno suele tener en cuenta es
la aerodinámica. La aerodinámica, especialmente en lo relacionado con la
producción de energía. Las cargas de especial interés en el diseño estructural son
las que podrían surgir en vientos muy fuertes, o las que generan daños por fatiga.
Cuando un aerogenerador está parado en los fuertes vientos, las fuerzas de
arrastre son la consideración primordial. Cuando la turbina está funcionando, es
fuerzas de elevación que crean las cargas aerodinámicas de preocupación.
2. Gravedad
La gravedad es una fuente importante de cargas sobre las palas de turbinas
grandes, aunque no lo es tanto en máquinas más pequeñas. En cualquier caso, el
peso en la parte superior de la torre es significativa para el diseño de la torre y a la
instalación de la máquina.
94
3. Interacciones Dinámicas
Inducida por fuerzas aerodinámicas y gravitacionales a su vez induce cargas de
movimiento en otras partes de la máquina. Por ejemplo, las turbinas eólicas de eje
prácticamente todos horizontales permiten algún movimiento alrededor de un eje
de guiñada. Cuando se produce el movimiento de guiñada mientras el rotor está
girando habrá inducido fuerzas giroscópicas. Estas fuerzas pueden ser
sustanciales cuando la velocidad de guiñada es alta.
4. Control Mecánico
El control de la turbina de viento a veces puede ser una fuente de cargas
significativas. Por ejemplo, a partir de una turbina que utiliza un generador de
inducción o detener la turbina mediante la aplicación de un freno puede generar
cargas sustanciales a lo largo de la estructura.
3.2.3 Efectos de Cargas
Las cargas experimentadas por una turbina eólica son importantes en dos áreas
principales: (1) resistencia a la rotura y (2) la fatiga. Las turbinas de viento pueden
ocasionalmente experimentar cargas muy altas.
3.3 Principios generales de la mecánica
En esta sección se presenta una visión general de algunos de los principios de la
mecánica básica y dinámicas que son de particular interés en el diseño de la
turbina de viento. Los fundamentos de la mecánica de las turbinas de viento son
esencialmente los mismos que los de otras estructuras similares.
3.3.1 Temas seleccionados de mecánica básica
Hay algunos temas de mecánica básica de ingeniería que vale la pena señalar a,
porque tienen una relevancia especial a la energía eólica y puede no ser familiar
para todos los lectores.
3.3.1.1 Fuerzas de inercia
En la mayor parte de la dinámica de la enseñanza actual, las fuerzas que se
consideran son exclusivamente fuerzas reales. A veces es conveniente, sin
embargo, para describir ciertas aceleraciones en términos de ficticia
'' fuerzas de inercia. Esto se hace a menudo en el caso de los sistemas de rotación,
incluyendo en el análisis de la dinámica del rotor de la turbina eólica. Por ejemplo,
el efecto de la aceleración centrípeta asociada con la rotación del rotor se explica
por la fuerza centrífuga de inercia.
95
3.3.1.2 La fragua del voladizo Vigas
La flexión de las vigas es un tema importante en la resistencia de los materiales.
Una pala de aerogenerador es básicamente una viga en voladizo, por lo que el
tema es de particular relevancia. Un simple pero interesante ejemplo de una viga
en voladizo es uno que se carga de manera uniforme. Para este caso, el diagrama
de momento de flexión, M(x), se describe por una parábola invertida parcial:
𝑴(𝒙) =
𝒘
𝟐
)(𝑳 − 𝒙)𝟐 Ecua. 34
El momento máximo de flexión, Mmáx, está en el lado de fijación y está dada por:
𝑴𝒎𝒂𝒙 =
𝒘𝑳𝟐
𝟐
=
𝑾𝑳
𝟐
Ecua. 35
donde L es la longitud de la viga, x es la distancia desde el extremo fijo de la viga,
w es la carga (fuerza / unidad de longitud), y W es la carga total.
La tensión máxima en la viga también está en el punto de unión y, además, está
a la distancia máxima, c, desde el eje neutral. Para una pala de turbina eólica en
flexión, el eje neutro sería casi la misma que la línea de la cuerda y c sería
aproximadamente la mitad del espesor de perfil aerodinámico.
En forma de ecuación, la tensión máxima, Smax, en un haz con zona de momento
de inercia I
𝑴
𝒄
𝝈𝒎𝒂𝒙 = 𝒎𝒂𝒙
Ecua. 36
𝑰
3.3.1.3 Rígido cuerpo plano de rotación
La rotación bidimensional
Cuando un cuerpo, tal como un rotor de turbina eólica, está girando, adquiere
momento angular. El momento angular, H, se caracteriza por un vector cuya
magnitud es el producto de la velocidad de rotación O y el momento de masa de
inercia polar, J. La dirección del vector se determina por la regla de la mano derecha
(la cual si los dedos de la mano derecha están recogidos en el sentido de giro, el
pulgar apunta en la dirección apropiada). En forma de ecuación:
Ecua. 37
Desde principios básicos, la suma de los momentos aplicados, M, sobre el centro de
masa es igual a la tasa de tiempo de cambio del momento angular sobre el centro
de masa. Esto es:
96
Ecua. 38
En la mayoría de situaciones de interés en la dinámica de la turbina de viento el
momento de inercia puede considerarse constante. Por lo tanto la magnitud de la
suma de los momentos es:
donde a es la aceleración angular de la masa inercial.
En el contexto de este texto, un momento continua aplicado a un cuerpo giratorio se
conoce como par, y denotado por 'Q.' La relación entre pares aplicados y
aceleración angular, a, es análoga a la existente entre la fuerza y la aceleración
lineal:
Ecua. 40
Cuando gira a una velocidad constante, no hay aceleración angular o
desaceleración. Así, la suma de los pares aplicados debe ser cero. Por ejemplo, si
un rotor de turbina eólica está girando a una velocidad constante en un viento
constante, el par de accionamiento desde el rotor debe ser igual a la par del
generador más los pares de pérdida en el tren de accionamiento.
Potencia de rotación / Energía
Un cuerpo giratorio contiene energía cinética, E, dada por:
𝑬=
𝟏
𝟐
𝑱𝑸𝟐
Ecua. 41
La potencia P consumida o generada por un cuerpo en rotación es dada por el
producto del par y la velocidad rotacional:
𝑷 = 𝑸𝜴
Ecua. 42
3.3.1.4 Movimiento giroscópico
Movimiento giroscópico es de particular preocupación en el diseño de turbinas de
viento, porque de guiñada de la turbina mientras el rotor está girando puede
resultar en cargas giroscópicos significativos. Los efectos de movimiento
giroscópico se ilustran en el teorema principal del giroscopio, que se resume a
continuación.
En este ejemplo, se supone que un cuerpo rígido, con un momento de masa de
inercia polar constante de J, está girando con el momento angular JO.
97
El teorema principal del giroscopio establece que si un giroscopio de momento
angular JO gira con velocidad o alrededor de un eje perpendicular a O ('' un
movimiento de precesión), entonces un momento, actúa sobre el giroscopio
alrededor de un eje perpendicular tanto al eje giroscópico , O, y el eje de precesión,
o. A la inversa, un momento aplicado que no es paralelo a O puede inducir la
precesión.
Giroscópico movimiento puede ser considerado con la ayuda de la figura 4.3. Una
rueda de bicicleta de peso Wse muestra girando en el sentido contrario a las
agujas del reloj, con el apoyo en el extremo de un eje por una cadena. La rueda
caería si no estuviera girando. De hecho, se está girando, y en lugar de caer, es
un movimiento de precesión en un plano horizontal (sentido contrario a las agujas
del reloj cuando se ve desde arriba).
El momento que actúa sobre la rueda es Wa, por lo
Ecua. 43
Por lo tanto, la tasa de precesión es:
Ecua. 44
Las direcciones relativas de rotación están relacionados entre sí por productos
cruzados y la regla de la mano derecha de la siguiente manera:
Ecua. 45
Donde , M, ω, y Ω son el momento, la tasa de precesión, y los vectores de velocidad
angular, respectivamente.
98
Fig. 83- Movimiento de Giroscopio
3.3.2 Vibraciones
El término 'vibración' se refiere al movimiento alternativo limitado de una partícula o
un objeto en un sistema elástico. El movimiento va a cualquier lado de una posición
de equilibrio. La vibración es importante en las turbinas eólicas, ya que son
estructuras parcialmente elásticas y que operan en un entorno inestable que tiende
a resultar en una respuesta vibratoria. La presencia de vibraciones puede dar lugar
a desviaciones que deben tenerse en cuenta en el diseño de la turbina y también
puede resultar en el fallo prematuro debido a la fatiga de los materiales que
componen la turbina. Además, gran parte del funcionamiento de la turbina eólica
puede entenderse mejor en el contexto del movimiento vibratorio. La siguiente
sección proporciona una visión general de los aspectos de las vibraciones más
importantes para aplicaciones de turbinas de viento.
3.3.2.1 Amortiguado Vibraciones
Las vibraciones, como vimos anteriormente anteriormente continuarán indefinidamente.
En todas las vibraciones reales, los movimientos eventualmente desaparecen. Este
efecto se puede modelar mediante la inclusión de un término de amortiguamiento
viscoso. Amortiguación implica una fuerza, por lo general se supone que es
proporcional a la velocidad, que se opone al movimiento
3.4 Dinámica de Rotor de Turbinas de Viento
Imponer cargas de interacciones dinámicas produce fuerzas y movimientos en
99
turbinas de viento que necesitan ser entendidos durante el proceso de diseño.
Los efectos de todos los diferentes tipos de carga (estática, constante, cíclico,
transitoria, impulsivo, y estocástico) necesitan ser determinados. En esta sección,
se consideran dos enfoques para el análisis de las fuerzas y los movimientos de
una turbina eólica. El primer enfoque utiliza un modelo de rotor rígido ideales muy
simples para ilustrar los conceptos básicos acerca de las cargas de turbinas
estables.
El segundo enfoque incluye el desarrollo de un modelo dinámico linealizado
altamente de una turbina eólica de eje horizontal. El modelo simplificado puede ser
utilizado para ilustrar la naturaleza de la respuesta de la turbina a cargas
constantes o cíclicas. Algunos de los modelos dinámicos más detallados se
discuten en el capítulo 7. Estos pueden predecir con mayor precisión la respuesta
de la turbina a estocásticos o transitorios cargas, pero tienden a ser bastante
complejo.
3.4.1 Las cargas en un rotor Ideal
Las cargas de rotor más importantes de una turbina de viento son las que asocian
con el empuje de las palas y el par motor para accionar el rotor. Modelar el rotor
como un rotor sencillo rígido, aerodinámico ideal es útil para hacerse una idea de
las presiones continuas sobre una turbina de viento. Las principales cargas
aerodinámicas sobre un rotor ideales satisfacer el límite de Betz se pueden
encontrar con bastante facilidad.
3.4.1.1 Momentos de flexión y tensiones
Hoja momentos de flexión son generalmente designados como ya sea de flap o de
canto. Flap momentos de flexión hacen que las hojas se doblen contra el viento o la
dirección del viento. Momentos de canto son paralelos al eje del rotor y dan lugar a
la par la producción de energía. Ellos se refieren a veces como "lead-lag".
Fuerzas y momentos axiales
El flap momento de flexión en la raíz de una cuchilla ideal de una turbina con
múltiples cuchillas está dada por el producto de la fuerza de empuje por la cuchilla
y 2/3 del radio. Esto se puede ver como sigue.
Considere el rotor como compuesto de una serie de anillos concéntricos de
anchura dr. El momento de flexión de raíz de flap en una sola hoja, MB, para una
turbina con cuchillas B es:
Ecua. 46
100
Tras la integración y la recopilación de términos, el resultado es:
Ecua. 47
.
La fuerza de cizallamiento, SB, en la raíz de la pala es simplemente el empuje
dividido por el número de palas:
En resumen, para un rotor ideales dado, fuerzas de flexión y tensiones varían con
el cuadrado de la velocidad del viento y son independientes de la posición angular
de la cuchilla (azimut). Además, cuchillas en rotores diseñados para
funcionamiento superior relación de velocidad de la punta tienen acordes más
pequeños y área de sección transversal momento de inercia, por lo que
experimentan tensiones de flap más altas.
3.4.2 Linealizado Hinge–Spring de la hoja del rotor
La dinámica de la turbina de viento reales puede ser bastante complicado. Las
cargas pueden ser variables, y la estructura en sí pueden moverse en formas que
afectan a las cargas. Para analizar todos estos efectos que interactúan, se deben
utilizar modelos matemáticos muy detallados. Sin embargo una gran comprensión
se puede obtener teniendo en cuenta un modelo simplificado del rotor y el examen
de su respuesta a las cargas simplificados. El método se describe a continuación
se basa en la de Eggleston y Stoddard (1987). Este modelo proporciona una visión
no sólo en las respuestas de la turbina a cargas constantes, sino también a las
cargas cíclicas.
El modelo simplificado que se conoce como el "modelo de rotor de palas bisagra
Hinge–Spring 'o "Modelo de articulación de la primavera", para abreviar. La
esencia del modelo es que incorpora el detalle suficiente para ser útil, pero es
suficientemente simplificada que las soluciones analíticas son posibles. Mediante
el examen de las soluciones, es posible discernir algunas de las causas y los
efectos del movimiento de la turbina eólica más significativos. El modelo de
bisagra de resorte se compone de cuatro partes básicas: (1) un modelo de cada
pala como un cuerpo rígido conectado a un concentrador rígida por medio de
bisagras y resortes, (2) un estado estacionario linealizado, modelo aerodinámico
flujo uniforme, (3 ) la consideración de flujo no uniforme como 'perturbaciones', y
(4) una forma sinusoidal asumido para las soluciones.
3.4.2.1 Tipos de Hoja de movimiento
El modelo de bisagra de resorte permite tres direcciones de movimiento de la hoja
e incorpora bisagras y resortes para todos ellos. Las tres direcciones de
101
movimiento permitido por las bisagras son: (1) de flap, (2) de plomo-lag, (3) de
torsión.
Los muelles de retorno de la cuchilla a su posición "normal" en el cubo.
Como se mencionó anteriormente, aleteo se refiere a movimiento paralelo al eje
de rotación del rotor. Para un rotor alineado con el viento, aleteo sería en la
dirección del viento, u opuesta a la misma. Fuerzas de empuje en la dirección
aleteo son de particular importancia, ya que las mayores tensiones en las cuchillas
son normalmente debido a la flexión de flap.
El movimiento en el plano de rotación. Se refiere al movimiento relativo al
movimiento de rotación de la cuchilla. En el movimiento principal de la hoja se
mueve más rápido que la velocidad de rotación en general, y en movimiento de
retraso que se mueve más lento. Movimientos y fuerzas de plomo-lag están
asociados con las fluctuaciones en el par en el eje principal y con las fluctuaciones
de la potencia del generador.
El movimiento de Torcion refiere al movimiento sobre el eje de cabeceo. Para una
turbina de viento fija el tono, movimiento de torsión en general no es de gran
importancia. En una turbina eólica de paso variable, movimiento de torsión puede
causar fluctuaciones de cargas en el mecanismo de control de paso.
3.4.2.2 Fuentes de Cargas
El modelo de la bisagra de la primavera como se desarrolló a continuación incluye
un análisis de cómo el rotor responde a seis fuentes de cargas:
La rotación del rotor;
La gravedad;
Velocidad de guiñada constante;
Viento constante;
Error de orientación;
Cizalladura del viento lineal.
Estas cargas pueden ser aplicadas de forma independiente o en combinación con
los otros. El análisis proporcionará una solución general para la respuesta del rotor
que es una función de la hoja de acimut, la posición angular de rotación de la
cuchilla. La solución se verá para contener tres términos: el primero independiente
de la posición azimutal, la segunda una función de la posición azimutal de sine, y la
tercera una función del coseno de la posición acimutal. El desarrollo se divide en
dos partes: (1) movimiento "libre", y (2) de movimiento forzado. El movimiento libre
incluye los efectos de la gravedad y la rotación. El caso de movimiento forzado
incluye un viento constante y estable de guiñada. Las desviaciones de viento
constante (error de guiñada y la cizalladura del viento) son considerados como
perturbaciones en el viento constante.
102
3.4.2.3 Cargas de Aspa y Eje (HUB)
Los momentos y fuerzas en el cubo y la torre se pueden determinar a partir de las
fuerzas de la hoja.
Para una turbina de rotor rígido (con cuchillas se tambaleaba en voladizo y no),
tanto aleteo y plomo-lag momentos se transmiten al concentrador. Batiendo es por
lo general la carga aerodinámica predominante, y en la siguiente discusión de la
atención se centrará en el efecto de las cargas de ese tipo. En un rotor
tambaleante, por otro lado, no hay momentos aleteo se transmiten al cubo (a
menos que las paradas se tambalean HIT). Sólo en el plano fuerzas (en la
dirección de la torsión) se transfieren al concentrador. Una discusión detallada de
la respuesta del rotor tambaleante, sin embargo, está más allá del alcance de este
texto.
La Figura 84 ilustra el sistema de coordenadas para las fuerzas y momentos
transmitidos al centro de un rotor típico.
Recordemos que el ángulo de la hoja aleteo se aproxima por la suma:
Ecua. 47
La raíz del momento de flexión de la pala correspondiente para cada cuchilla es:
Ecua. 48
103
Fig. 84- Sistema de coordenadas para eje momentos y fuerzas; brazo de momento; tasa de
desvío
Tabla 6 Reacciones de tambaleo para Aspas y Ejes en voladizo
De una manera similar al desarrollo de las ecuaciones de la aleta, se podría
desarrollar Momento de avance-retroceso y las ecuaciones de torsión y utilizar el
conjunto completo de respuestas para obtener cargas de cubo. Los términos
resumidos en la Sección 3.4.1.2 son suficientes para una expansión del modelo.
Y en el orden para encontrar las cargas de cubo de múltiples cuchillas, las fuerzas
y los momentos de todos ellos se determinan y los efectos se suman. Tenga en
cuenta que en cada caso se debe utilizar el acimut apropiado. Por ejemplo, en un
rotor con tres palas, acimutes debe ser de 120 grados de separación para cada uno
de ellos. Cabe señalar que, con este modelo simplificado, si las cuchillas están
espaciadas simétricamente alrededor del rotor, el efecto acumulativo sobre los
pares de rotores es que son constantes a lo largo de la rotación. Tabla 6 resume las
reacciones de enlace fundamental para ambas cuchillas se tambaleó y en voladizo.
104
3.4.2.9 Cargas de la Torre
Las cargas de torre resultan de las cargas aerodinámicas sobre la torre, el peso de la
turbina y la torre, y de todas las fuerzas que actúan sobre la propia máquina, ya
sea constante, cíclico, impulsiva, etc.
Las cargas aerodinámicas Torre
Cargas aerodinámicas torre incluyen el empuje del rotor durante el funcionamiento
normal, el momento a partir del par del rotor, y las cargas de viento extremas.
Cargas de viento extremas son los que podrían ocurrir como resultado de una
ráfaga excepcional cuando la turbina está funcionando a la potencia nominal o
debido a un viento inusualmente alta cuando la turbina no está en funcionamiento.
Vibración de la Torre
Las frecuencias naturales de la torre (por torres tipo voladiza) se puede calcular por
métodos descritos en la Sección 3.2.2, incluyendo el peso de la torre superior. Estas
torres implican métodos más allá del alcance de este texto. La consideración más
importante en el diseño de la torre es evitar las frecuencias naturales cerca de las
frecuencias de rotor (1P, 2P o 3P). Una torre 'suave' es aquel cuya frecuencia
fundamental naturales está por debajo de la frecuencia de paso de la cuchilla
mientras que una torre rígida tiene su frecuencia natural dominante por encima de
esa frecuencia.
3.5 Métodos de Modelado Aerogenerador respuesta estructural
Como ya debe ser claro, los aerogeneradores son estructuras complejas. Con
frecuencia es necesario para determinar diversos aspectos de su respuesta, como
las tensiones dentro de la estructura, las desviaciones, las frecuencias naturales,
etc. Esto se realiza típicamente usando modelos matemáticos. Estos son conjuntos
de relaciones matemáticas que se utilizan para describir el comportamiento del
sistema real. Los modelos pueden variar en gran medida en su complejidad, y así
diferentes tipos de modelos se utilizan para diferentes aplicaciones. La regla
general es que el modelo debe ser lo más complejo, ya que tiene que ser, pero no
más.
Las aplicaciones típicas para modelos mecánicos en el diseño de la turbina de
viento, son los siguientes:
Modelo simple para el control;
Modelo suficiente para ilustración;
Detalle de modelo para la investigación de la fatiga, la desviación, y la
respuesta extrema;
Modelo para determinar la frecuencia natural del sistema de componentes
o completa.
105
El modelo dinámico de la bisagra de la primavera lineal izado discute en la Sección
3.4, por ejemplo, puede ser útil para elucidar la respuesta de primer orden de un
rotor de turbina eólica a una gama de condiciones de entrada. Es menos útil, sin
embargo, en aquellas situaciones en aspectos importantes de la respuesta no se
pondrán de manifiesto utilizando un enfoque simplificado. Con el fin de superar esta
limitación, ha sido necesario desarrollar modelos más detallados y, a veces más
especializados. Por lo general, estos modelos requieren soluciones numéricas y se
implementan en código de computadora digital. Modelos no lineales especializados
pueden utilizarse para investigar la dinámica de los subsistemas de turbinas tales
como aletas de punta, cuchillas, los vínculos de paso, trenes de engranajes, etc. No
hay un modelo único ha sido hasta ahora capaz de hacer frente a todas estas
situaciones, pero la comprensión de los enfoques de modelado proporciona las
herramientas para análisis más detallados.. En esta sección se analizan algunos de
los métodos que se utilizan en esos modelos.
Los métodos más comunes utilizados en el análisis estructural de las turbinas de
viento son:
Método de los elementos finitos;
Método de parámetros concentrados;
Análisis modal;
Análisis multicuerpo.
3.5.1 Método de Elementos Finitos
El método de elementos finitos (MEF) es una técnica utilizada para analizar el
comportamiento en una variedad de situaciones, incluyendo las estructuras. La
técnica se basa en dividir la estructura en un gran número de elementos
relativamente pequeños. Cada elemento incluye un número de algunos de estos
nodos pueden ser interior al elemento 'nodos.'; otros están en el límite. Elementos
sólo interactúan a través de los nodos en el límite.
Cada elemento se caracteriza por una serie de parámetros, como el grosor, la
densidad, la rigidez, módulo de cizallamiento, etc. También asociados con cada
nodo son desplazamientos o grados de libertad. Estos pueden incluir traducciones,
la rotación, el movimiento axial, etc. El método de elementos finitos se utiliza con
mayor frecuencia para estudiar en detalle los componentes individuales dentro de
un sistema más grande. Para sistemas más complejos que constan de diversos
componentes en movimiento de manera diferente con respecto a cada uno de
otros, otros enfoques como la dinámica de sistemas multicuerpo (véase más
adelante) se utilizan. Un modelo de elementos finitos puede entonces ser utilizado
posteriormente, por ejemplo, para estudiar las variaciones en las tensiones dentro
de un componente. Véase la Figura 85 para una ilustración de las tensiones blade
calculados sobre una hoja utilizando MEF.
106
3.5.2 Método del Parámetro Lumped
Un modelo de parámetros concentrados es aquella en la que se considera un
cuerpo no uniforme que se compone de un número relativamente pequeño de los
cuerpos que pueden ser simplemente caracteriza. Esta caracterización puede
consistir de tan poco como la masa del cuerpo, o puede incluir otros parámetros,
así, como la rigidez. Por ejemplo, el tren de accionamiento de una turbina eólica,
en realidad consiste en un número de componentes giratorios, tales como el rotor
en sí, ejes, engranajes, y el rotor del generador. En el modelado de un tren de
transmisión que es común a caracterizarlo como pocas inercias y rigideces
concentrados.
3.5.3 Método de Análisis Modal
Modal análisis es un método utilizado para resolver las ecuaciones de movimiento
en múltiples grados de libertad de los sistemas de vibración. El enfoque de análisis
modal permite ecuaciones acopladas de moción para ser transformados en
ecuaciones desacopladas 'modales' que cada uno puede ser resuelto por
separado. Los resultados de cada una de las ecuaciones modales se añaden
entonces ('superposición') para dar el resultado completo. Análisis modal es más
útil para los sistemas lineales con amortiguación clásica. (Amortiguación clásica se
refiere a situaciones en las que el mismo mecanismo de amortiguación se aplica a
través de una estructura). Análisis modal requiere que la estructura de interés se
primera conceptualmente dividido en secciones analizables. Estas secciones son
entonces pre-analizados para determinar un número de las frecuencias naturales y
las formas de los modos.
107
Estas frecuencias naturales y las formas de los modos se pueden encontrar
mediante la aplicación de técnicas básicas, tales como el método de Euler o
Myklestad
3.5.4 Análisis multicuerpo
Análisis multicuerpo se refiere a la modelización del movimiento de un sistema
mecánico que comprende más de un componente o 'cuerpo'. Los cuerpos son
subdivisiones distinguibles de la estructura más amplia, que son relativamente
uniforme dentro de sí mismos. Ejemplos de turbina eólica incluyen ahusados o
vigas retorcidas (tales como las cuchillas o torre), varias otras partes cónicos,
acoplamientos, engranajes, generadores, etc. Los cuerpos pueden moverse en una
variedad de formas con respecto a la otra. Los cuerpos pueden ser rígidos o
flexibles. Los cuerpos se unen entre sí por 'links' que pueden incorporar ciertas
restricciones. Tenga en cuenta que la descripción de los cuerpos en sistemas
multicuerpo es significativamente más detallados que los de los modelos de
parámetros concentrados. El método multicuerpo implica la creación de ecuaciones
dinámicas que afectan a los diferentes órganos y sus limitaciones. Las ecuaciones
se resuelven entonces mediante técnicas numéricas adecuadas. Análisis
multicuerpo surgió de la mecánica clásica como una aplicación extendida de la
Segunda Ley de Newton, pero se ha vuelto cada vez más complejo e integrador
con el tiempo.
108
4.0 Aspectos Eléctricos De Turbinas Eólicas
4.1 Resumen
La electricidad está asociado con muchos aspectos de los aerogeneradores
modernos. La función principal de la mayoría de las turbinas de viento es la
generación de electricidad. Un gran número de temas en la ingeniería de sistemas
de potencia son, pues, una relación directa con los problemas asociados con las
turbinas de viento. Estos incluyen la generación de la turbina en sí, así como la
transferencia de poder a la tensión del generador, transformador de voltaje más
alto, la interconexión con las líneas de energía, distribución, transmisión, y eventual
uso por el consumidor. La electricidad se usa en la operación, el seguimiento y el
control de la mayoría de las turbinas de viento. También se utiliza en la evaluación
del sitio y la recopilación de datos y análisis. Para redes aisladas o débiles, o
sistemas con una gran cantidad de generación eólica, almacenamiento de
electricidad es un problema. Por último, el rayo es un fenómeno eléctrico natural
que puede ser muy importantes para el diseño, instalación y operación de las
turbinas de viento.
Potencia de Generación
Interconexión y
Distribución
Control
Generadores
Convertidores de potencia electrónicos
Cables de potencia
Interruptor
Circuitos
Transformadores
Calidad de potencia
Sensores
Controladores
Solenoides
Monitoreo
TABLA 7
4.2 Conceptos básicos de la Energía Eléctrica
4.2.1 Fundamentos de Corriente Alterna
La forma de electricidad más utilizado en los sistemas de energía se conoce como
corriente alterna
(AC).
. En AC circuitos (en estado estacionario) todos los voltajes y corrientes varían de
forma sinusoidal.
109
Hay un ciclo sinusoidal completa cada período. La frecuencia, f, de la onda
senoidal es el número de ciclos por segundo. Es el recíproco del período. La
tensión instantánea, v, en un circuito de CA puede ser descrita por la siguiente
ecuación:
Ecua. 49
u
donde Vmax es el valor máximo
de la tensión, t es el tiempo, y f es el ángulo
de fase.
El ángulo de fase indica el desplazamiento angular de la sinusoide a partir de una
referencia sinusoidal
onda con un ángulo de fase de cero. El ángulo de fase es importante porque las
corrientes y voltajes, aunque sinusoidal, no son necesariamente en fase entre sí.
En el análisis de circuitos de corriente alterna con frecuencia es útil comenzar
suponiendo que uno de los sinusoides tiene de fase cero, y luego encontrar los
ángulos de fase de los otros sinusoides con respecto a la referencia.
Una medida importante resumen de la tensión es la raíz cuadrada media (RMS)
Vrms valor:
Ecua. 50
Tenga en cuenta que el valor eficaz de la tensión es2√2/2 aproximadamente 70% de
la tensión máxima para una pura onda sinusoidal. La tensión eficaz se refiere a
menudo como la magnitud de la tensión, por lo que |V|=Vrms
4.2.2. Impedancia Complex
El equivalente de CA de la resistencia es la impedancia compleja, Ẑ, que tiene en
cuenta tanto la resistencia y la reactancia. Impedancia se puede utilizar con el
voltaje del fasor para determinar fasor de corriente y viceversa. Impedancia consta
de una parte real (resistencia) y una parte imaginaria (Reactancia inductiva o
capacitiva.) Impedancia resistiva está dada por ẐR=R, Donde R es la resistencia.
Impedancias inductivas y capacitivas son dados por, respectivamente, ẐL=j2πfL y
ẐC= -j/(2πFc) donde f es la frecuencia de la CA en Hertz. Tenga en cuenta que para
un circuito que es completamente resistiva, la impedancia es igual a la resistencia.
Para un circuito que es completamente Inductiva o capacitiva, la impedancia es igual
a la reactancia. Tenga en cuenta, también, que las impedancias inductivas y
capacitivas son una función de la frecuencia de las fluctuaciones de tensión del
110
sistema AC.
Las normas relativas voltaje, corriente, y la impedancia en circuitos de corriente
alterna son análogas a las de Circuitos de corriente continúa.
Impedancias en paralelo
Impedancias en serie
Ley de Ohm
donde
es la impedancia efectiva de impedancias
en serie y
es la
impedancia efectiva de N impedancias paralelas. Leyes de Kirchhoff también se
aplican a fasor corrientes y voltajes en circuitos con impedancias complejas.
4.2.2.5 Potencia en Circuitos AC
Mediante la medición de la tensión rms, Vrms, y corriente eficaz, Irms, en un
circuito de corriente alterna, y multiplicando juntos, como se haría en un circuito de
corriente continua, se puede obtener la potencia aparente, S. Eso es:
Ecua. 51
Potencia aparente, que se mide en unidades de voltios-amperios (VA), sin
embargo, puede ser un poco engañoso. En particular, no puede corresponder a la
potencia real consumida o bien (en el caso de una carga) o producida (en el caso
de un generador).
El poder real, P, se obtiene multiplicando la potencia aparente por el coseno del
ángulo de fase entre la tensión y la corriente. Por tanto, se da por:
Ecua. 52
Energía eléctrica real se mide en unidades de vatios.
Corriente que fluye en las reactancias inductivas o capacitivas no se traduce en
un poder real, pero da lugar a la potencia reactiva, Q. Se viene dada por:
111
Ecua. 53
La potencia reactiva, que se mide en unidades de 'voltios-amperios reactivos'
(VAR) es importante, ya que debe producirse en algún lugar del sistema. Por
ejemplo, las corrientes que crean el campo magnético en un generador
corresponden a un requisito de potencia reactiva. Corriente reactiva también puede
resultar en pérdidas de la línea superior en líneas de distribución o de transmisión,
debido a la resistencia de las líneas.
El "factor de potencia" de un circuito o dispositivo describe la fracción de la potencia
aparente que es el poder real. Por lo tanto, el factor de potencia es simplemente la
relación de bienes a la potencia aparente. Por ejemplo, un factor de potencia de 1
indica que todo el poder es el poder real. El factor de potencia se define a menudo
como el coseno del ángulo de fase entre la tensión y la corriente, cos(ø). Esta
cantidad es llamada correctamente el factor de potencia de desplazamiento. En
circuitos con corrientes sinusoidales y voltajes, los dos tipos de factor de potencia
son equivalentes. En circuitos con corrientes no sinusoidales y tensiones, el factor
de potencia de desplazamiento no es aplicable.
El ángulo de fase entre la corriente y el voltaje se llama el ángulo de factor de
potencia, ya que es la base para determinar el factor de potencia. Es importante
tener en cuenta que el ángulo de factor de potencia puede ser positivo o negativo,
correspondiente a si la onda sinusoidal de corriente está llevando el voltaje de onda
sinusoidal o viceversa, como se discutió anteriormente. En consecuencia, si el
ángulo de factor de potencia es positiva, se dice que el factor de potencia que se
conduce; si es negativo, el factor de potencia se está quedando. Un ejemplo de las
formas de onda relativas de tensión, corriente y potencia aparente se muestra en la
figura 4.2 para un circuito con una resistencia y un condensador. Para este
ejemplo, la corriente y la tensión están fuera de fase por 45 grados, por lo que el
factor de potencia es 0.707. La onda sinusoidal de corriente precede a la onda de
tensión, por lo que el factor de potencia es líder.
Un simple ejemplo de la utilización de fasores para los cálculos en un circuito de
CA es la siguiente. Considere un circuito simple con una fuente de tensión de CA,
un resistor, un inductor y un condensador, todos conectados en serie en un solo
bucle. La resistencia de la resistencia es 4Ω, las reactancias de la inductor y el
condensador son J3 Ω y j6 Ω, respectivamente. La tensión eficaz es de 100<0. El
problema es encontrar la corriente y la potencia disipada en la resistencia.
112
4.2.2.6 trifásico de alimentación de CA
La generación de energía y grandes cargas eléctricas comúnmente operan en un
sistema de energía trifásica. Un sistema de energía trifásica es uno en el que los
voltajes de suministro de las cargas todos tienen una diferencia de fase fija entre sí
de 120 grados (2π = 3 radianes). Individual trifásica
Fig. 86 voltaje de CA, v, corriente, i, y la potencia aparente, vi, en un circuito con una
resistencia y un condensador
Fig. 87 bobinas conectadas-Y; VLN y VLL, voltaje de línea a neutro y línea a línea,
respectivamente
transformadores, generadores o motores, todos tienen sus devanados dispuestos
en una de dos maneras. Estos son: (1) Y (o en estrella) y (2) Δ (delta), como se
ilustra en las figuras 87 y 88. La aparición de los devanados es responsable de los
113
nombres. Tenga en cuenta que el sistema Y tiene cuatro cables (uno de los cuales
es el neutro), mientras que el sistema Δ tiene tres cables.
Las cargas en un sistema de tres fases son, idealmente, equilibrado. Eso
significa que las impedancias son todos iguales en cada fase. Si ese es el caso, y
suponiendo que los voltajes son de igual magnitud, a continuación, las corrientes
son iguales entre sí pero están fuera de fase entre sí por 120 grados, como son las
tensiones. Tensiones en sistemas trifásicos pueden ser de línea a neutro, VLN, o
voltajes línea a línea, VLL. También pueden ser descritos como tensiones de línea
(VLL) o tensiones de fase (voltajes a través de cargas o bobinas). Las corrientes en
cada conductor, fuera de las terminales de una carga, se conocen como corrientes
de línea. Las corrientes a través de una carga se conocen como corrientes de
carga o de fase. En general, en una equilibrada carga conectada en Y, las
corrientes de línea y corrientes de fase son iguales, la corriente de neutro es cero,
y la tensión de línea a línea, VLL, es
multiplicada por la tensión de línea a neutro,
VLN. Carga conectada en delta balanceada, las tensiones de línea y tensiones de
multiplicada por la corriente
fase son iguales, mientras que la línea corriente es
de fase. La Figura 4.5 ilustra conectado en estrella trifásica cargas, supone que ser
equilibrado y todos impedancia Ẑ
Si un sistema de tres fases se sabe que está equilibrada, puede ser
caracterizado por un circuito equivalente sola fase. El método supone una carga
conectada en Y, en el que cada impedancia es igual a Z ^. (Una carga conectada
en delta podría ser utilizado por la aplicación de un Y apropiado Transformación D
al impedancias, dando ẐY = ẐΔ 3). El circuito equivalente de una línea es una fase
de un cuatro hilos,
Fig. 88 bobinas conectadas-Delta
114
Fig. 89 cargas conectadas-Y; VLN y VLL, de línea a neutro y de línea a línea de tensión,
respectivamente; Z ^, impedancia trifásica circuito Y-conectado, excepto que el voltaje
utilizado es el voltaje de línea a neutro, con un ángulo de fase inicial supuesta de cero
4.2.2.7 Niveles de tensión
Una de las principales ventajas de la energía de CA es que el nivel de tensión
puede ser cambiado fácilmente por el uso de transformadores de potencia. El poder
puede ser utilizado convenientemente y de manera segura en relativamente baja
tensión, pero se transforma en un nivel mucho más alto para la transmisión o
distribución. Para una buena aproximación, se ahorra energía durante la
transformación, de modo que cuando se eleva el voltaje, corrientes se bajan. Esto
sirve para reducir las pérdidas en líneas de transmisión o distribución, permitiendo
conductores mucho más pequeños y menos costosos.
Turbinas de viento típicamente producen energía a 480 V (en los Estados Unidos)
o 690 V (en Europa). Las turbinas de viento a menudo están conectados a las
líneas de distribución con tensiones en el rango de 10 kV a 69 kV.
4.2.3.1 Ley de Ampere
La corriente que fluye en un conductor induce un campo magnético de intensidad H
en la vecindad del conductor. Esto se describe en la Ley de Ampere:
Ecua. 54
Que relaciona la corriente en el conductor, I, a la integral de línea de la intensidad
del campo magnético a lo largo de una trayectoria, l, alrededor del conductor.
4.2.3.3 Ley de Faraday
Un campo magnético cambiante induce una fuerza electromotriz (EMF, o tensión) E
en un conductor dentro del campo. Esto se describe en la Ley de Inducción de
Faraday:
115
Ecua. 55
Nota el signo menos en la ecuación anterior. Esto refleja la observación de que los
flujos de corriente inducida en una dirección tal que se opone al cambio que lo
produjo (Ley de Lenz). Obsérvese también que, en este texto, el símbolo E se usa
para indicar voltajes inducidos, mientras que V se utiliza para tensiones en los
terminales de un dispositivo.
Como resultado de la ley de Faraday, una bobina en un campo magnético
cambiante tendrá una FEM inducida en él que es proporcional al número de
vueltas:
Ecua. 56
El término l ¼ N Fse refiere a menudo como los vínculos de flujo en el
dispositivo.
4.2.3.4 Fuerza inducida
Una corriente que fluye en un conductor en presencia de un campo magnético se
traducirá en una fuerza inducida que actúa sobre el conductor. Esta es la propiedad
fundamental de los motores. Correspondientemente, un conductor que se ve
obligado a moverse a través de un campo magnético tendrá una corriente inducida
en ella. Esta es la propiedad fundamental de los generadores. En cualquier caso, la
fuerza dF en un conductor de longitud incremental de d '(un vector), la corriente y el
campo magnético dB están relacionados por la ecuación siguiente vector:
Ecua. 57
Tenga en cuenta el producto vectorial ( ) En la ecuación (57). Esto indica que el
conductor está en ángulo recto con el campo cuando la fuerza es mayor. La fuerza
es también en una dirección perpendicular tanto al campo y el conductor.
4.3 Transformadores de Potencia
Los transformadores de potencia son componentes importantes en cualquier
sistema de alimentación de CA. La mayoría de las instalaciones de turbinas de
viento incluyen al menos un transformador para convertir la energía generada a la
tensión de la red eléctrica local a la que está conectada la turbina. Además, otros
transformadores pueden ser utilizados para obtener los voltajes de nivel apropiado
para varias piezas auxiliares de los equipos en el lugar (luces, sistemas de
116
monitoreo y control, herramientas, compresores, etc.) Los transformadores son
valoradas en función de su potencia aparente (kVA ). Los transformadores de
distribución están típicamente en el rango 5-50kVA, y bien puede ser más grande,
dependiendo de la aplicación. Transformadores de subestaciones son típicamente
entre 1.000 kVA y 60000. kVA
Un transformador es un dispositivo que tiene dos o más bobinas, acoplado
mediante un flujo magnético mutuo. Los transformadores son generalmente
compuestos por múltiples vueltas de alambre, envuelto alrededor de un núcleo de
metal laminado. En la situación más común del transformador tiene dos bobinados,
uno conocido como el primario y el otro como el secundario. El cable es
normalmente de cobre, y es de tamaño por lo que habrá una resistencia mínima. El
núcleo se compone de hojas laminadas de metal, separadas por aislamiento de
manera que habrá un mínimo de corrientes parásitas que circulan en el núcleo.
Los principios de funcionamiento de los transformadores se basan en la Ley de
Faraday de la inducción. Un transformador ideal es aquel que tiene: (1) no hay
pérdidas en las bobinas, (2) no hay pérdidas en el núcleo, y (3) sin pérdida de flujo.
Fig.90 transformador ideal; una relación de vueltas; E, tensión inducida; N, el número de
vueltas; subíndices 1 y 2 se refieren a los devanados primario y secundario,
respectivamente
Supongamos que E1 se aplica al primario de un transformador ideal con bobinas
N1 en las bobinas primarias y N2 en el secundario. La relación entre las tensiones
en todo el primario y el secundario es igual a la relación entre el número de vueltas:
Ecua. 58
El parámetro a es conocida como la 'relación de vueltas' del
transformador.
Las corrientes primaria y secundaria son inversamente proporcionales al número
de vueltas (ya que deben ser mantener la potencia o la constante de producto IV):
Ecua. 59
Real, o no ideal, los transformadores tienen pérdidas en el núcleo y bobinados, así
como la fuga de flujo. Un transformador no ideal puede ser representado por un
117
circuito equivalente como se muestra en la Figura 90.
En la Figura 90, R se refiere a las resistencias, X para reactancias, 1 y 2 de las
bobinas primaria y secundaria, respectivamente. R1 y R2 representan la resistencia
de los devanados primario y secundario. X1 y X2 representan las inductancias de
fuga de los dos devanados. El subíndice M se refiere a la inductancia de
magnetización y el subíndice c a la resistencia del núcleo. V se refiere a voltajes
terminales y E1 y E2 son los voltajes inducidos en el cuya relación es la relación de
vueltas primaria y secundaria. Parámetros a ambos lados de las bobinas pueden
ser referidos a (o verse desde) un lado. La Figura 91 ilustra el circuito equivalente
del transformador cuando se hace referencia al lado primario.
Un transformador de corriente se dibuja si hay o no una carga en él. Habrá
pérdidas asociadas con la corriente, y el factor de potencia invariablemente ser
retrasada. La magnitud de las pérdidas y el factor de potencia se pueden estimar si
las resistencias y las reactancias en la Figura 91
Fig. 91 transformador no ideal; para la notación, ver el texto
Fig. 92 transformador no ideal, a que se refiere devanado primario; para
la notación, ver el texto
118
Son conocidos. Estos parámetros se pueden calcular mediante el uso de dos
pruebas: (1) la medición de la tensión, corriente y potencia sin carga (circuito abierto
en una de las bobinas) y (2) la medición de voltaje, corriente y potencia con un solo
de las bobinas en cortocircuito. Esta última prueba será a tensión reducida para
evitar que se queme el transformador. La mayoría de los textos sobre maquinaria
eléctrica describen estas pruebas en más detalle.
4.4 Máquinas Eléctricas
Los generadores convierten la energía mecánica en energía eléctrica; motores
convierten la energía eléctrica en energía mecánica. Ambos generadores y
motores se refieren con frecuencia como las máquinas eléctricas, ya que por lo
general se pueden ejecutar como uno o el otro. Las máquinas eléctricas más
comúnmente encontrados en las turbinas de viento son las que actúan como
generadores. Los dos tipos más comunes son los generadores de inducción y
generadores síncronos. Además, algunas turbinas más pequeñas utilizan
generadores de corriente continua.
4.4.1 Máquinas Eléctricas simples
Muchas de las características importantes de la mayoría de las máquinas eléctricas
son evidentes en la operación de la máquina eléctrica más simple, tal como se
muestra en la Figura 92.
N
Φ
S
Fig. 93 máquina eléctrica simple; i, la corriente; F, flujo magnético; N, polo magnético
Norte; S, polo magnético Sur
En esta máquina eléctrica simple, los dos polos magnéticos (o par de polos)
crean un campo. El bucle de alambre es la armadura. La armadura puede girar, y
se supone que hay escobillas y anillos rozantes o un conmutador presentes para
permitir que la corriente pase desde un bastidor estacionario de referencia a la
rotación. (Un conmutador es un dispositivo que puede cambiar la dirección de una
corriente eléctrica. Conmutadores se utilizan en generadores de corriente continua
para cambiar lo que de otro modo sería AC a DC.) Si una corriente está fluyendo
119
en la armadura, una fuerza actúa sobre el alambre. La fuerza sobre el lado
izquierdo es hacia abajo, y en el lado derecho hacia arriba. Las fuerzas a
continuación, crear un par de torsión, haciendo que la máquina actúe como un
motor. En esta máquina el par será un máximo cuando el bucle de armadura es
horizontal, y un mínimo (cero) cuando el bucle es vertical.
Por el contrario, si hay inicialmente no hay corriente en el cable, pero si el bucle
de la armadura se hace girar a través del campo, una tensión se generará de
conformidad con la Ley de Faraday. Si el bucle es parte de un circuito completo,
una corriente fluirá entonces. En este caso la máquina está actuando como un
generador. En general las direcciones de corriente o voltaje, velocidad, dirección
del campo, y la fuerza son especificados por las relaciones entre productos.
Cuando se utilizan anillos de deslizamiento hay dos anillos de metal montados en
el eje de la armadura con un anillo conectado a un extremo de la bobina de la
armadura y el otro anillo conectado a la otra bobina. Cepillos en los anillos de
deslizamiento permiten que la corriente se dirige a una carga. A medida que la
armadura gira, la dirección de la tensión dependerá de la posición del alambre en
el campo magnético. De hecho, la tensión variará sinusoidalmente si la armadura
gira a velocidad fija. En este modo, esta simple máquina actúa como un generador
de corriente alterna. Del mismo modo en el modo de motor, la fuerza (y por tanto el
par) se invierte sinusoidal durante una revolución.
Un simple conmutador para esta máquina tendría dos segmentos, cada uno que
abarcan 180 grados sobre la armadura. Cepillos pondría en contacto con un
segmento a la vez, pero segmento de cepillo de emparejamiento se revertirse una
vez durante cada revolución. La tensión inducida consistiría entonces de una
secuencia de ondas sinusoidales medio, todos del mismo signo. En el modo de
motor el par sería siempre en la misma dirección. El principio conmutador es la
base de motores y generadores convencionales de corriente continua.
Máquinas eléctricas reales son similares en muchos aspectos a este sencillo,
pero también hay algunas diferencias importantes:
Excepto en las máquinas con campos suministrados por
permanentes, los campos normalmente se producen eléctricamente.
Los campos son más a
menudo en la parte giratoria dela máquina (el
rotor), mientras que la armadura está en la parte fija (estator).
También hay un campo magnético producido por la armadura que interactúa
con el campo del rotor. El campo magnético resultante es a menudo la
principal preocupación para analizar el rendimiento de una máquina eléctrica.
imanes
4.4.2 Los campos magnéticos giratorios
Por disposición adecuada de los devanados en una máquina eléctrica que es
posible establecer un campo magnético giratorio, incluso si los devanados están
estacionarios. Esta propiedad constituye una base importante del diseño de la
120
mayoría de las máquinas eléctricas de corriente alterna. En particular, es la
interacción de campo magnético giratorio del estator con el campo magnético del
rotor que determina las características de funcionamiento de la máquina.
El principio de campos de rotación puede ser desarrollado en un número de
maneras, pero los puntos clave a tener en cuenta son que: (1) las bobinas en el
estator son 120 grados (2π/3 radianes) de diferencia, (2) la magnitud de cada
campo varía sinusoidalmente, con la corriente en cada fase diferente de los otros
por 120 grados, y (3) los devanados son tales que la distribución de cada campo es
sinusoidal. El campo magnético resultante, H, expresada en forma de fasores en
términos de los tres campos magnéticos individuales H, es:
Ecua. 60
Sustituyendo en sinusoides de las corrientes, y la introducción de una constante
arbitraria C para significar que los resultados de campo de las corrientes, que tienen:
Ecua. 61
Después de realizar el álgebra, obtenemos el resultado interesante que la magnitud
de H es constante, y su posición angular es radianes 2πft. Este último resultado
implica inmediatamente que el campo está girando a una velocidad constante de
revoluciones f por segundo, que es la misma que la frecuencia del sistema eléctrico.
La discusión anterior involucrado implícitamente un par de polos magnéticos por
fase. Es bastante posible disponer devanados a fin de desarrollar un número
arbitrario de pares de polos por fase. Al aumentar el número de polos, el campo
magnético resultante giratorio girará más lentamente. Sin carga, el rotor de una
máquina eléctrica girará a la misma velocidad que el campo magnético giratorio,
llamado la velocidad síncrona. En general, la velocidad síncrona es:
donde n es la velocidad de sincronismo en rpm, f es la frecuencia de la alimentación
eléctrica de CA en Hz, y P es el número de polos.
La ecuación anterior implica, por ejemplo, que cualquier máquina de CA de dos
polos conectado a una 60 Hz de la red eléctrica se convertiría en vacío a 3600 rpm,
una máquina de cuatro polos sería llegar a 1800 rpm, una máquina de seis polos a
1200 rpm, etc. Vale la pena señalar aquí que la mayoría de los generadores de
turbinas eólicas son máquinas de cuatro polos, teniendo así una velocidad síncrona
de 1800 rpm cuando se conecta a un sistema de potencia de 60 Hz. En un sistema
121
de 50 Hz, tales generadores se volverían a 1500 rpm.
4.4.3 Las máquinas síncronas
4.4.3.1 Descripción de las máquinas síncronas
Las máquinas síncronas se utilizan como generadores de grandes plantas de
energía de la estación central. En aplicaciones de turbinas eólicas que se utilizan de
vez en cuando en las grandes turbinas conectadas a la red, o en combinación con
convertidores electrónicos de potencia en aerogeneradores de velocidad variable.
Un tipo de máquina sincrónica con imanes permanentes también se utiliza en
algunas turbinas de viento independiente. En este caso, la salida es a menudo
rectificado a CC antes de que la potencia se suministra a la carga final. Finalmente,
las máquinas síncronas pueden ser utilizados como un medio de control de la
tensión y una fuente de potencia reactiva en redes de corriente alterna autónomas.
En este caso se conocen como condensadores sincrónicos.
En su forma más común de la máquina síncrona consta de: (1) un campo
magnético en el rotor que gira con el rotor y (2) una armadura estacionaria que
contiene múltiples devanados. El campo en el rotor se crea electromagnéticamente
por una corriente DC (referido como excitación) en los devanados de campo. La
corriente de campo DC se proporciona normalmente por un pequeño generador de
CC montada en el eje del rotor de la máquina síncrona. Este pequeño generador
se conoce como el 'excitador', ya que proporciona la excitación al campo. El
excitador tiene su campo estacionario y su salida es en el rotor de la máquina
síncrona. La salida del excitador se rectifica a derecha DC en el rotor y se alimenta
directamente en devanados de campo de la máquina sincrónica. Alternativamente,
la corriente de campo puede ser transmitido a rotor de la máquina síncrona a
través de anillos colectores y escobillas. En cualquier caso la corriente de campo
del rotor de la máquina síncrona se controla externamente.
4.4.3.2 A partir Máquinas síncronas
Máquinas síncronas no son intrínsecamente auto-arranque. En algunas
aplicaciones, la máquina se pone a la velocidad de un motor primario externo y
luego sincronizado a la red eléctrica. Para otras aplicaciones, se requiere una
capacidad de auto-arranque. En este caso, el rotor está construido con barras de
amortiguación '' incrustado en él. Estas barras permiten que la máquina para iniciar
como hace una máquina de inducción. Durante el funcionamiento de las barras de
amortiguación también ayudan a amortiguar las oscilaciones en el rotor de la
máquina.
Independientemente de cómo se trajo una máquina sincrónica a la velocidad de
operación, se debe prestar especial atención a la sincronización del generador con
la red a la que se va a conectar. Se requiere un partido muy precisa entre la
posición angular del rotor y el ángulo eléctrico de la alimentación de CA en el
instante de la conexión. Las turbinas de viento con generadores síncronos
normalmente se inician por el viento (a diferencia de muchas turbinas con
generadores de inducción, que se pueden monitorear a la velocidad). Cuando la
122
turbina va a ser conectado a una red de CA que ya está energizado, el control de
velocidad activo de la turbina puede ser necesario como parte del proceso de
sincronización. En algunas redes eléctricas aisladas, el aire acondicionado energía
es suministrada por un generador síncrono en un generador diesel o una turbina de
viento, pero no ambos. Esto obvia la necesidad de un sincronizador.
4.4.4 Máquinas de Inducción
4.4.4.1 Visión general de Máquinas de Inducción
Máquinas de inducción (también conocidas como máquinas asíncronas) se utilizan
comúnmente para motores en la mayoría de aplicaciones industriales y
comerciales. Durante mucho tiempo se ha sabido que las máquinas de inducción
pueden ser utilizados como generadores, pero rara vez se emplea de esa manera
hasta el advenimiento de la generación distribuida a mediados de la década de
1970. Máquinas de inducción son ahora el tipo más común de generador de
turbinas de viento, y se utilizan para otra generación distribuida (hidroeléctrica,
accionado por el motor) también.
Máquinas de inducción son populares debido a que (1) tienen una construcción
simple, robusta, (2) que son relativamente baratos, y (3) pueden ser conectados y
desconectados de la red de forma relativamente simple.
El estator de una máquina de inducción consiste en múltiples devanados, similar
a la de una máquina síncrona. El rotor en el tipo más común de máquina de
inducción no tiene devanados. Más bien se ha barras conductoras, incrustados en
un núcleo sólido, laminado. Las barras hacen que el rotor se asemejan a una jaula
de ardilla. Por esta razón, las máquinas de este tipo se denominan comúnmente
máquinas de jaula de ardilla. A lo largo de este libro, sin embargo, los generadores
de inducción con rotor de jaula de ardilla se refieren a menudo simplemente como
"generadores de inducción. '
Algunas máquinas de inducción tienen bobinados en el rotor. Estos son
conocidos como máquinas de rotor bobinado. Estas máquinas se utilizan a veces
en las turbinas eólicas de velocidad variable Son más caros y menos resistente que
aquellos con rotores de jaula de ardilla. Dependiendo de cómo se utilizan las
máquinas de rotor bobinado, también pueden ser referidos como doblemente
alimentado. Esto es porque la energía puede ser enviada a o toma del rotor, así
como del estator.
Máquinas de inducción requieren una fuente externa de energía reactiva.
También requieren una fuente externa de frecuencia constante para controlar la
velocidad de rotación. Por estas razones, se conectan más comúnmente a una red
eléctrica más grande. En estas redes de generadores síncronos conectados a
motores primarios con reguladores de velocidad en última instancia, establecer la
frecuencia de la red y el suministro de la potencia reactiva requerida.
Cuando funciona como un generador, la máquina de inducción se puede
conectar a la red y lleva hasta la velocidad de funcionamiento como un motor, o
puede ser acelerada por el motor primario, y luego se conecta a la red. Hay
cuestiones que deben considerarse en cualquier caso. Algunos de éstos se
discuten más adelante en esta sección.
123
Máquinas de inducción a menudo operan con un factor de potencia pobres. Para
mejorar el factor de potencia, condensadores están conectados frecuentemente a
la máquina en o cerca del punto de conexión a la red eléctrica. Se debe tener
cuidado en dimensionamiento de los condensadores cuando la máquina se hace
funcionar como un generador. En particular, no debe ser posible para el generador
para ser 'auto-excitado' si la conexión a la red se pierde debido a un fallo.
Máquinas de inducción pueden ser utilizados como generadores en pequeñas
redes eléctricas o incluso en aplicaciones aisladas. En estos casos, a veces se
deben tomar medidas especiales para que funcionen correctamente. Las medidas
implican suministro de potencia reactiva, el mantenimiento de la estabilidad de
frecuencia, y trayendo una máquina estacionaria hasta la velocidad de
funcionamiento.
4.4.4.4 Máquina de Inducción dinámica
Cuando se aplica un par de torsión constante para el rotor de una máquina de
inducción que funcionará a una hoja fija. Si el par de torsión aplicado es variable,
entonces la velocidad del rotor puede variar también. La relación se puede describir
por:
donde J es el momento de inercia del rotor del generador, o es la velocidad angular
del rotor del generador (rad / s), Qe es el par eléctrico y Qr es el par aplicado al rotor
del generador.
Cuando el par aplicado varía lentamente con respecto a la frecuencia de la red
eléctrica, un enfoque cuasi estado de equilibrio puede ser tomada para el análisis.
Es decir, el par eléctrico puede suponer para ser una función de deslizamiento como
se describe en la ecuación (5.66) y las ecuaciones anteriores. El enfoque cuasi
estado de equilibrio puede ser utilizado normalmente en la evaluación de la
dinámica de turbinas de viento. Esto es porque la frecuencia de las fluctuaciones en
el par inducido por el viento y las de oscilaciones mecánicas son generalmente
mucho menor que la frecuencia de la red. La ecuación generador de inducción
utilizado de esta manera se aplicó, por ejemplo, en el modelo de tren de
accionamiento de turbina eólica dinámico, DrvTrnVB. Esto se describe en Manwell
et al. (1996).
Vale la pena señalar que las máquinas de inducción son algo "más suave" en su
respuesta dinámica a las condiciones cambiantes que son máquinas síncronas.
Esto se debe a que las máquinas de inducción se someten a una pequeña, pero
significativa, de cambio de velocidad (deslizamiento) como el par o alejar cambios.
Las máquinas síncronas, como se indicó anteriormente, funcionan a velocidad
constante, con sólo el ángulo de potencia cambiando a medida que el par varía.
Por lo tanto las máquinas síncronas tienen una respuesta muy "dura" a las
condiciones fluctuantes.
124
4.4.5 Generadores de corriente continua
Un tipo históricamente importante de la máquina eléctrica para aplicaciones de
turbinas de viento es la derivación de la herida generador de corriente continua.
Estos una vez que se utilizan comúnmente en las turbinas de viento, de carga de
baterías más pequeñas. En estos generadores es el campo en el estator y la
armadura está en el rotor. El campo eléctrico es creado por las corrientes que
pasan a través del devanado de campo que está en paralelo ("shunt ') con los
devanados de inducido. Un conmutador en el rotor, en efecto, rectifica la energía
generada a DC. La corriente generada completa se debe pasar a través del
conmutador y escobillas.
En estos generadores, la corriente de campo, y el campo magnético, por lo tanto
(hasta un punto), aumenta con la velocidad de funcionamiento. El voltaje inducido y
par eléctrico también aumentan con la velocidad. La velocidad real de la turbina se
determina por un equilibrio entre el par de torsión desde el rotor de la turbina y el
par eléctrico.
Generadores de corriente continua de este tipo rara vez se utilizan hoy en día
debido a los altos costos y las necesidades de mantenimiento. Este último se
asocian particularmente con los cepillos. Más detalles sobre generadores de este
tipo se pueden encontrar en Johnson (1985).
4.4.6 generadores de imán permanente
Un tipo de máquina eléctrica que se utiliza con mayor frecuencia en aplicaciones
de turbinas de viento es el generador de imanes permanentes. Este es ahora el
generador de elección en la mayoría de los pequeños generadores de turbinas de
viento, hasta por lo menos 10 kW, y que puede ser utilizado en turbinas eólicas
más grandes también. En estos generadores, los imanes permanentes
proporcionan el campo magnético, lo que no hay necesidad de devanados de
campo o el suministro de corriente al campo. En un ejemplo, los imanes están
integrados directamente en un rotor cilíndrico de aluminio fundido. La potencia se
toma de una armadura estacionaria, por lo que no hay necesidad de conmutador,
anillos colectores, o cepillos. Debido a la construcción de la máquina es tan simple,
el generador de imán permanente es bastante resistente.
Los principios de funcionamiento de generadores de imanes permanentes son
similares a los de las máquinas síncronas. De hecho, se refieren con frecuencia de
imán permanente como generadores síncronos, con la PMSG siglas. La principal
diferencia es que el campo es proporcionado por imanes permanentes en lugar de
electroimanes. Además, estas máquinas son generalmente se ejecuta asynchronormente. Es decir, que no están generalmente conectados directamente a la red de
corriente alterna. La energía producida por el generador es inicialmente de voltaje
variable y frecuencia de AC. Esta CA se rectifica a menudo inmediatamente a DC.
La alimentación de CC está entonces o bien dirigida a DC cargas o batería de
almacenamiento, o de lo contrario se invierte para CA con una frecuencia fija y el
voltaje.
125
4.4.7 Otras Máquinas Eléctricas
Hay por lo menos otros dos tipos de generadores que pueden ser considerados
para aplicaciones de turbinas eólicas: (1) generadores de accionamiento directo y
generadores de reluctancia (2) conmutadas.
Generadores de accionamiento directo son esencialmente máquinas síncronas
de diseño especial. La principal diferencia de las máquinas estándar es que están
construidos con un número suficiente de polos para permitir que el rotor del
generador a girar a la misma velocidad que el rotor de la turbina eólica. Esto
elimina la necesidad de una caja de cambios. Debido al gran número de polos, el
diámetro del generador es relativamente grande. Generadores de accionamiento
directo de las turbinas eólicas se utilizan con frecuencia en combinación con
convertidores electrónicos de potencia. Esto proporciona un margen de maniobra
en los requisitos de tensión y frecuencia del propio generador.
Switched generadores de reluctancia emplean un rotor con polos salientes (sin
bobinados). Como las vueltas del rotor, la reluctancia del circuito magnético que
une el estator y los cambios rotor. La renuencia cambiar varía el campo magnético
resultante e induce corrientes en la armadura. Un generador de reluctancia
conmutada por lo tanto no requiere de campo de excitación. Los generadores de
reluctancia conmutada que se están desarrollando en la actualidad están
destinados para su uso con convertidores electrónicos de potencia. Generadores
de reluctancia conmutada necesitan poco mantenimiento debido a su construcción
simple. No hay generadores de reluctancia conmutada que actualmente se utilizan
en aerogeneradores comerciales, pero las investigaciones con ese fin está en
marcha
4.4.8 Generador de Diseño Mecánico
Hay una serie de cuestiones a considerar en el diseño mecánico de un generador.
El eje del rotor y los cojinetes principales se han diseñado de acuerdo con los
principios. La carcasa del estator del generador es normalmente de acero. Carcasas
de generadores comerciales vienen en tamaños de marco estándar. Devanados de
la armadura (y el campo en su caso) son de alambre de cobre, establecido en las
ranuras. El alambre no sólo está aislado, pero el aislamiento adicional se añade
para proteger los devanados del medio ambiente y para estabilizarlos. Diferentes
tipos de aislamiento se pueden especificar dependiendo de la aplicación.
126
Fig. 94. Construcción de la máquina de inducción trifásico típico (Rockwell International
Corp.)
El exterior del generador está diseñado para proteger el interior de la
condensación, la lluvia, el polvo, la arena que sopla, etc. Dos diseños son de uso
general: (1) abierto a prueba de goteo y (2) totalmente cerrado, enfriado por
ventilador (TEFC). El diseño a prueba de goteo abierta se ha utilizado en muchas
turbinas de viento, ya que es menos caro que otras opciones, y se ha supuesto que
la góndola es suficiente para proteger el generador del medio ambiente. En
muchas situaciones, sin embargo, parece que la protección adicional
proporcionada por un diseño TEFC puede valer la pena el costo.
Un diagrama esquemático de una máquina de inducción típica (jaula de ardilla) se
ilustra en la Figura 94.
4.4.9 Especificación Generador
Los diseñadores de la turbina de viento no son, en general, diseñadores de
generador. O bien seleccionar comercialmente máquinas eléctricas disponibles, tal
vez con algunas modificaciones menores, o que especifican los requisitos
generales de la máquina a ser especialmente diseñados. Las características
básicas de los tipos de generadores importantes se han discutido previamente.
La siguiente es una lista resumida de las consideraciones clave desde el punto de
vista del diseñador de la turbina de viento:
velocidad de funcionamiento;
eficiencia a plena carga y carga parcial;
factor de potencia y fuente de potencia reactiva(máquinas de inducción);
regulación de voltaje (máquinas síncronas);
método de arranque;
corriente de arranque (máquinas de inducción);
sincronización (máquinas síncronas);
marco tamaño y generador de peso;
127
tipo de aislamiento;
protección del medio ambiente;
capacidad de soportar esfuerzos de torsiónfluctuating;
eliminación de calor;
viabilidad del uso de múltiples generadores;
operación con alto nivel de ruido eléctrico de los conductores
4.5 Transformadores de corriente
4.5.1 Descripción general de Transformadores de corriente
Convertidores de potencia son dispositivos utilizados para cambiar la potencia
eléctrica a partir de una forma a otra, como en AC a DC, DC a AC, un voltaje a otro,
o de una frecuencia a otra. Convertidores de energía tienen muchas aplicaciones en
sistemas de energía eólica. Ellos están siendo utilizados con mayor frecuencia ya
que la tecnología se desarrolla y como los costos bajan. Por ejemplo, convertidores
de potencia se utilizan en los arrancadores de generadores, turbinas eólicas de
velocidad variable, y en redes aisladas.
Convertidores modernos son dispositivos electrónicos de potencia. Básicamente,
estos consisten en un sistema electrónico sistema de control de encendido y
apagado interruptores electrónicos, a menudo llamado "válvulas". Algunos de los
elementos del circuito clave utilizados en los inversores incluyen diodos,
rectificadores controlados de silicio (SCR, también conocidos como tiristores), puerta
apagar tiristores (GTO), y transistores de potencia. Diodos se comportan como
válvulas de una vía. SCR son esencialmente diodos que pueden ser activados por un
impulso externo (en el 'Puerta'), pero se apagan sólo por el voltaje a través de ellos
de marcha atrás. GTO son SCR que pueden ser desactivados, así como en. Los
transistores requieren la señal de puerta que se aplicará de forma continua para
quedarse. La función general de transistores de potencia es similar a GTOs, pero la
circuitería de disparo es más simple. 'Transistor de potencia,' El término como se usa
aquí, incluye Darlingtons, MOSFETs de potencia, y los transistores bipolares de
puerta aislada (IGBT). La tendencia actual es hacia el aumento de uso de los IGBT.
La figura 5.22 muestra los símbolos utilizados en este capítulo para los elementos
más importantes del circuito convertidor de potencia.
4.5.2 Rectificadores
Los rectificadores son dispositivos que convierten la corriente alterna en corriente
continua. Pueden ser utilizados en: (1) sistemas de vientos de carga de baterías o
(2) como parte de un sistema de energía eólica de velocidad variable.
128
Fig. 95. elementos de circuito del convertidor; SCR, rectificador controlado de silicio; GTO,
puerta desactivar tiristor.
Figura 96 Diodo rectificador puente utilizando alimentación trifásica
El tipo más simple de rectificador utiliza un circuito de puente de diodos para
convertir la CA a la fluctuación de DC. Un ejemplo de un rectificador de este tipo se
muestra en la Figura 95 En este rectificador, la entrada es de alimentación de CA
de tres fases; la salida es DC.
Figura 96 ilustra la tensión de CC que se produce a partir de un suministro
trifásico, 480 V utilizando el tipo de rectificador mostrado en la Figura 95. Algunos
de filtrado se puede hacer (como con los inductores que se muestran en la figura)
para eliminar algunas de las fluctuaciones. El voltaje DC promedio, VDC, que
resulta de la rectificación de una tensión trifásica de RMS Vrms es:
Ecua. 64
4.5.3 Inversores
Descripción general de Inversores
Con el fin de convertir a CC a CA, a partir de una batería o de CA rectificada en
una turbina eólica de velocidad variable, se utiliza un inversor. Históricamente, los
grupos electrógenos de motor se han utilizado para convertir corriente continua en
corriente alterna. Estos son generadores de corriente alterna accionados por
129
motores de corriente continua. Este método es muy fiable, pero también es caro e
ineficiente. Debido a su fiabilidad, sin embargo, todavía se utilizan en algunas
situaciones exigentes.
Figura 97. Tensión de CC del rectificador controlado de fase-
Figura 98. conmutados por línea rectificador controlado de silicio (SCR) inversor
En la actualidad la mayoría de los inversores son de tipo electrónico. Un inversor
electrónico consiste típicamente de elementos de circuito que conmutan altas
corrientes y circuitos de control que coordina la conmutación de esos elementos.
El circuito de control determina muchos aspectos de la exitosa operación del
inversor. Hay dos tipos básicos de inversor electrónico: Línea-conmutados y
convertidores de conmutación forzada. El término conmutación se refiere a la
conmutación del flujo de corriente de una parte de un circuito a otro.
Los inversores que están conectados a una red de CA y que tome su conmutación
de la señal de la red se conocen con el nombre genérico en lugar de convertidores
conmutados. Figura 98 ilustra un circuito de puente SCR, tal como se utiliza en un
130
inversor de línea de conmutación forzada de tres fases simple. El circuito es similar
al puente rectificador trifásico se muestra más arriba, pero en este caso la
temporización de la conmutación de los elementos de circuito se controla
externamente y la corriente fluye desde la alimentación de CC a las líneas trifásicas
de corriente alterna.
Convertidores de conmutación forzada do no necesita ser conectado a una red de
CA. Por lo tanto, pueden ser utilizados para aplicaciones autónomas. Ellos tienden a
ser más caros que los inversores conmutados. El sistema de circuitos reales de
inversores puede ser de una gran variedad de diseños, pero los inversores caen en
una de dos categorías principales: (1) inversores de fuente de tensión e inversores
(2) fuente de corriente. En inversores de fuente de corriente, la corriente de la fuente
de CC se mantiene constante independientemente de la carga. Por lo general se
utilizan para suministrar cargas de alto factor de potencia, donde la impedancia es
constante o decreciente a frecuencias armónicas. Eficiencias globales son buenos
(alrededor de 96%), pero el circuito de control es relativamente compleja.
Convertidores de fuente de tensión operan de una fuente de alimentación de CC de
tensión constante. Ellos son el tipo más utilizado hasta la fecha en las aplicaciones
de energía eólica. (Tenga en cuenta que la mayoría de los dispositivos descritos
aquí pueden operar como rectificadores o inversores, por lo que el convertidor de
término es también correspondiente.)
4.6 Aspectos eléctricos de velocidad variable Aerogeneradores
Operación variable de velocidad de las turbinas eólicas a menudo es deseable por
dos razones: (1) por debajo de la velocidad nominal del viento, el rotor de la turbina
eólica puede extraer más energía si la relación de velocidad de la punta se puede
mantener constante, lo que requiere que la velocidad del rotor varía con el viento
velocidad, y (2) la operación de velocidad variable del rotor de la turbina pueden
resultar en la reducción de las tensiones fluctuantes, y por lo tanto reduce la fatiga,
de los componentes de la cadena cinemática. Mientras que la operación de
velocidad variable del rotor de turbina puede ser deseable, sin embargo, dicha
operación complica la generación de electricidad de corriente alterna a una
frecuencia constante.
Hay, al menos en principio, una variedad de maneras para permitir el
funcionamiento a velocidad variable del rotor de la turbina, mientras que se
mantiene constante la frecuencia de generación. Estos pueden ser ya sea
mecánica o eléctrica. Casi la totalidad de los enfoques para el funcionamiento a
velocidad variable de las turbinas de viento en uso hoy en día, sin embargo, son
eléctricos. Operación de velocidad variable es posible con los siguientes tipos de
generadores:
generadores síncronos;
generadores de inducción de jaula de ardilla ();
generadores de inducción de rotor bobinado;
generadores de reluctancia conmutada.
131
A continuación se discuten los tres primeros de los anteriores, que son los más
comunes.
Figura 99 aerogenerador de velocidad variable con generador síncrono
4.6.1 velocidad Variable de operación de los generadores síncronos
Como se ha explicado anteriormente, hay básicamente dos tipos de generador
síncrono: (1) aquellos cuyos campos son excitación independiente, y (2) aquellos
cuyos campos son proporcionados por imanes permanentes. En cualquier caso la
frecuencia de salida es una función directa de la velocidad del generador y el
número de polos que tiene. Esto se cuantificó en la ecuación (98). Para un
generador síncrono para ser utilizado en una turbina eólica de velocidad variable, la
salida del generador primero debe ser rectificado a CC y luego se convierte de
nuevo a AC. Un acuerdo que permitiría que esto ocurra se muestra en la Figura 99.
En esta figura el rotor de la turbina eólica se muestra en el lado izquierdo. Mover
progresivamente hacia la derecha son el eje principal, la caja de cambios (GB),
generador (SG), rectificador (AC / DC), del circuito intermedio, el inversor (DC /
AC), y la rejilla. El inversor puede ser un rectificador de diodo o un rectificador
controlado, dependiendo de la situación. El inversor puede ser un inversor SCR o
un inversor PWM. En el caso de un generador síncrono excitado por separado,
puede haber control de voltaje en el propio generador. Si se trata de un generador
síncrono de imán permanente, control de tensión debe tener lugar en algún lugar
del circuito convertidor. Algunas turbinas eólicas utilizan un generador síncrono
polo múltiple con un número suficiente de polos que el generador puede estar
conectado directamente al eje principal, sin necesidad de una caja de cambios. En
este caso, se conoce como un generador de accionamiento directo. En
consecuencia, la caja de cambios en la Figura 99 se muestra con una línea de
puntos, lo que indica que puede o no ser incluido. Cabe señalar que de
accionamiento directo, los generadores multipolares son físicamente mucho más
grande que se generadores comúnmente utilizados con cajas de cambios.
4.6.2 Operación de velocidad variable de generadores de inducción de jaula de ardilla
Jaula de ardilla, generadores de inducción convencional (SQIG) se pueden usar en
las turbinas eólicas de velocidad variable, aunque el método de hacerlo no es tan
conceptualmente sencillo como el de generadores síncronos. En particular, los
generadores de inducción requieren una fuente de potencia reactiva, que debe ser
132
suministrada por un convertidor electrónico de potencia. Estos convertidores son
caros y también introducen pérdidas adicionales en el sistema. Las pérdidas son a
menudo del mismo orden de magnitud que las ganancias en eficiencia
aerodinámica, por lo que la ganancia neta en la producción de energía puede ser
relativamente pequeño. En este caso, el principal beneficio de la operación de
velocidad variable podría ser en la reducción de daños por fatiga con el resto de la
turbina.
Una jaula de ardilla configuración típica generador de inducción de velocidad
variable se ilustra en la Figura 100. Esta figura muestra el rotor de la turbina eólica,
la caja de cambios, generador de inducción, dos convertidores de potencia PWM,
un enlace de corriente continua entre ellos, y la red eléctrica. En esta
configuración, el convertidor del lado del generador (PWM 1) proporciona potencia
reactiva al rotor del generador, así como la aceptación de potencia real de la
misma. Se controla la frecuencia al rotor del generador, y por tanto su velocidad.
PWM 1 también convierte la potencia rotor a DC. El convertidor de potencia lado
de la red (PWM 2) convierte la corriente continua en corriente alterna a la tensión y
frecuencia adecuadas. Tenga en cuenta que puede haber otros componentes en el
circuito, incluyendo condensadores, inductores, o transformadores.
Figura 100 aerogenerador de velocidad variable con generador de inducción
de jaula de ardilla
4.7 Auxiliar Equipo Eléctrico
Hay una variedad de aparatos eléctricos auxiliares asociados con una instalación
de turbina de viento. Normalmente incluye tanto alta tensión (tensión del
generador) y los elementos de baja tensión. Figura 101 ilustra los principales
componentes de alta tensión para una instalación típica. Las líneas de puntos
indican los elementos que a menudo no están incluidos. Estos artículos se discuten
brevemente a continuación.
4.7.1 Cables eléctricos
El poder debe ser transferido desde el generador hasta la torre para aparatos de
conexión eléctrica en la base. Esto se hace a través de los cables de alimentación.
Generadores trifásicos tienen cuatro conductores, incluyendo el suelo o neutral.
Los conductores se hacen normalmente de cobre, y que están dimensionadas para
133
minimizar la caída de tensión y pérdidas de potencia.
En la mayoría de las turbinas eólicas más grandes, los conductores son
continuas desde el generador hacia abajo la torre para el contactor principal. A fin
de que los cables no ser envueltos y dañadas como las turbinas de pian, una
cantidad sustancial de holgura se deja en ellos de modo que se inclinan '' cuando
cuelgan hacia abajo de la torre. Los cables de alimentación están por lo tanto a
menudo se refiere como cables de caer. La holgura es tomado como el pian de
turbinas y luego puesto en libertad, ya que guiña hacia el otro lado. Con la
suficiente holgura, los cables rara vez o nunca se envuelven a cal y canto en la
mayoría de los sitios. Cuando lo hacen terminar demasiado lejos, sin embargo,
deben ser sin envolver. Esto se puede hacer de forma manual, después de
desconectar primero de ellos, o mediante el uso de una unidad de guiñada.
Figura 101 Aerogenerador equipos de alta tensión
4.7.2 anillos colectores
Algunas turbinas, en particular los más pequeños, utilizan cables discontinuos. Un
conjunto de cables está conectado al generador. Otro grupo se cae la torre.
Los anillos colectores y escobillas se utilizan para transferir el poder de un conjunto
a otro. En una aplicación típica de los anillos de deslizamiento están montados en un
cilindro unido a la parte inferior del bastidor principal de la turbina. El eje del cilindro
se encuentra en el eje de guiñada, de modo que el cilindro gira como las pian de
turbina. Los cepillos están montados en la torre de una manera tal que entran en
contacto con los anillos de deslizamiento independientemente de la orientación de la
134
turbina.
Los anillos colectores no se utilizan comúnmente en las turbinas eólicas más grandes
para transportar la energía hacia abajo la torre, ya que se convierten en bastante
caro ya que la capacidad actual-en libros se incrementa. Además, se requiere un
mantenimiento como el desgaste de los cepillos. Como se señaló anteriormente, sin
embargo, los anillos colectores y escobillas pueden ser utilizados para transportar la
potencia de deslizamiento fuera del rotor de un generador de inducción de rotor
bobinado en el sistema eléctrico estacionario de la góndola.
4.7.3 Arranque suave
Como se indica generadores de inducción sacarán mucho más corriente durante el
arranque a través de la línea de lo que producen cuando se ejecuta. A partir de esta
forma tiene numerosas desventajas. Las altas corrientes pueden resultar en una
falla prematura de los devanados del generador, y pueden dar lugar a caídas de
tensión para cargas en las inmediaciones de la red eléctrica. Aceleración rápida de
todo el tren de transmisión de turbina eólica puede resultar en daños por fatiga. En
redes aisladas con una cantidad limitada de energía reactiva, puede que no sea
posible iniciar una máquina de inducción grande en absoluto.
Debido a las altas corrientes que acompañan a través de la línea de salida de
máquinas de inducción, la mayoría de las turbinas de viento emplean algún tipo de
dispositivo de arranque suave. Estos pueden tomar una variedad de formas. En
general, son un tipo de convertidor electrónico de potencia que, por lo menos,
proporciona una corriente reducida al generador.
4.7.4 Contactores
El contactor principal es un interruptor que conecta los cables del generador al
resto de la red eléctrica. Cuando se emplea un arranque suave, el contactor
principal puede estar integrado con el arranque suave o puede ser un elemento
separado. En este último caso, la potencia puede ser dirigida a través del contactor
principal sólo después de que el generador ha sido criado para la velocidad de
operación. En este punto el arranque suave se conecta simultáneamente fuera del
circuito.
4.7.5 Disyuntores Y Fusibles
En algún lugar en el circuito entre el generador y la red eléctrica son los
interruptores automáticos o fusibles. Estos están destinados para abrir el circuito si
la corriente es demasiado alta, presumiblemente como resultado de un fallo o
cortocircuito. Los interruptores pueden restablecerse después de que se corrija el
135
fallo. Los fusibles deben ser reemplazados.
4.7.6 desconexión principal
Un interruptor de desconexión principal se proporciona generalmente entre la red
eléctrica y todo el sistema eléctrico de la turbina de viento. Este conmutador
normalmente debe dejarse cerrado, pero se puede abrir en su caso se está
trabajando en la instalación eléctrica de la turbina. La desconexión principal tendría
que ser abierta si cualquier trabajo fue a hacerse en el contactor principal y que, en
cualquier caso, proporcionar una medida adicional de seguridad durante cualquier
servicio eléctrico.
4.7.7 Factor de Potencia Condensadores de Corrección
Condensadores de corrección del factor de potencia se emplean con frecuencia
para mejorar el factor de potencia del generador cuando se ve desde la utilidad.
Estos están conectados tan cerca del generador, como es conveniente, pero
típicamente en la base de la torre o en una casa de control cercana.
4.7.8 Turbina cargas eléctricas
Puede haber un número de cargas eléctricas asociadas con la operación de las
turbinas de viento. Estos podrían incluir actuadores, motores hidráulicos, motores de
paso, unidades de guiñada, compresores de aire, equipos de control, etc. Tales
cargas requieren típicamente 120 V o 240 V. Puesto que la tensión del generador es
normalmente mayor que eso, un suministro de baja tensión tiene que ser
proporcionados por la utilidad, o STEP- abajo transformadore
136
ANALISIS CRÍTICO DE LOS DIFERENTES ENFOQUES
A partir de la revolución industrial el sistema energético mundial paso por dos
importantes transiciones, la primera de ellas, determino la conversión de recursos
energéticos fósiles, en trabajo mecánico gracias al suministro de la maquina de
vapor. La segunda transición que inicia con el siglo XX se caracterizo por la
creciente diversificación de las tecnologías de uso final energético y las fuentes de
abastecimiento de energía, a partir principalmente, del descubrimiento de la
electricidad y del perfeccionamiento de motor de combustión interna. Sin embargo,
en esa etapa también comenzó una creciente dependencia del petróleo para cubrir
las necesidades cada vez mayores de combustibles para la generación eléctrica y
transporte.
Este patrón de producción y consumo de energía tiene consecuencias ambientales
alarmantes. La quema de combustibles fósiles es la principal fuente de emisiones
de bióxido de carbono (CO2) no biogenico. Los productos de esta combustión
aumenta la concentración global de CO2 en la proporcionando un cambio climático
planetario debido a que el CO2 es un gas de efecto invernadero.
Es por ello que optamos por hacer el desarrollo de este tema que propone de una
forma libre de emisiones de CO2 la generación eléctrica para satisfacer las
necesidades de una población en constante crecimiento que día a día proporciona
una demanda mayor y pone en evidencia la necesidad de este tipo de generación
eléctrica
137
CAPITULO III
CONCLUSIÓNES
Después de un análisis detallado sobre la energía eólica, sus aplicaciones, ventajas,
desventajas, su historia, definición, su funcionamiento detallado en fin sus conceptos
más relevantes podemos llegar a la conclusión de que es una fuente de energía
inagotable y frena el agotamiento de combustibles fósiles contribuyendo a evitar el
cambio climático. Es una tecnología de aprovechamiento totalmente madura y puesta
a punto. La energía eólica ha probado ser más confiable que la energía solar en
cerros altos y nublados que generalmente presentan buen régimen de vientos.
El viento se está mostrando como un recurso energético seguro y económico en las
instalaciones situadas principalmente en Europa, los EE.UU. y la India. Los avances
tecnológicos de los últimos cinco años han colocado a la energía eólica en posición
de competir, en un futuro próximo, con las tecnologías de generación de energía
convencionales. El coste de producción de electricidad por la acción del viento en
Europa ha disminuido en los últimos 15 años aproximadamente en un 80%
138
BIBLIOGRAFIA
CAPITULO I
Mechanical engineering), Springer-Verlag Berlin, Heidelberg, New
York, 2002
[12]
Deutsches Institut für Normung: DIN 3990, Tragfähigkeitsberechnung
von Stirnrädern
(Calculation of load capacity of spur gears), Beuth-Verlag, Berlin,
1987
[13] International Organization of Standardisation (ISO): Calculation of load
capacity of spur and helical gears, ISO 6336, Genf, 1996
CAPITULO II
Althaus, D. (1996) las aspas aerodinámicas y experimentales Los resultados de la
Laminar túnel de viento del Instituto de Aerodynamik y Gasdynamik de la
Universidad de Stuttgart. Universidad de Stuttgart.
Althaus, D. y Wortmann, FX (1981) Stuttgarter Profilkatalog. Friedr. Vieweg und
Sohn, Braunschweig /
Wiesbaden.
CAPITULO III
Cerveza, FP, Johnston, ER, Jr., DeWolf, Mecánica para Ingenieros J. y Mazurek,
D. (2008), 5a. McGraw Hill
Book Co., Nueva York.
Chopra, AK (2007) Dinámica de Estructuras: Teoría y Aplicación de Ingeniería
Sísmica, 3ª edición. Pearson Prentice Hall, Upper Saddle River, Nueva Jersey.
CAPITULO IV
Ackerman, T. (2005) Energía Eólica en Sistemas de Potencia. John
Wiley & Sons, Ltd., de Chichester.
Baroudi, J. A, Dinavahi, V. y Knight, AM (2007) Una revisión de las topologías de
convertidores de potencia para generadores eólicos.
Energía Renovable, 32 (14), 2369-2385.
139
ANEXOS
140
141