Modelado del sistema
Anuncio

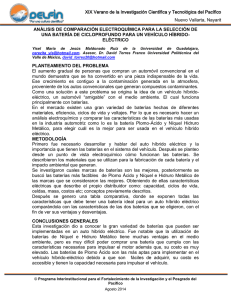
Optimización del consumo de combustible en un vehículo híbrido serie Fernando Avilés Calvete MOIGE 2011 4. Modelado del sistema Una vez seleccionado el tipo de sistema que utilizaremos será conveniente definir dicho modelo en términos matemáticos, ya que nos ayudará a comprender el mismo y simularlo. Será necesario, por tanto, realizar lo propio con cada parte del vehículo que debamos controlar, así como con el propio sistema gestor de energía del vehículo. En un primer paso describiremos las bases de cada modelo en cuestión y, finalmente, presentaremos el modelo completo. 4.1.Primera aproximación del sistema de gestión energética De manera análoga a los casos reales estudiados, nuestro modelo dispondrá de una serie de modos de funcionamiento. Los estados definidos en primera instancia para nuestro vehículo son los siguientes, que no son más que los definidos para los casos reales de Honda y Toyota, eliminando o agrupando algunos en función de la diferenciación provocada por las diferentes arquitecturas de los vehículos: • • • • • • • • Parada Arranque/Salida/Marcha Atrás Aceleración Moderada Velocidad Crucero Baja Velocidad Crucero Media Aceleración Alta Velocidad Crucero Alta Frenada Los posibles cambios de estado, vendrían marcados por la siguiente tabla, encargada de habilitar o deshabilitar la posibilidad de transición de un estado a otro: Parada Parada Arranque / Salida / Marcha Atrás Aceleración Moderada Velocidad Crucero Baja Velocidad Crucero Media Aceleración Alta Velocidad Crucero Alta Frenada Arranque / Salida / Marcha Atrás Aceleración Moderada Velocidad Crucero Baja Velocidad Crucero Media Aceleración Alta Tabla 4 - Transiciones entre estados de funcionamiento posibles en el vehículo 26 Velocidad Crucero Frenada Alta Optimización del consumo de combustible en un vehículo híbrido serie Fernando Avilés Calvete MOIGE 2011 Los cambios de estado estarán definidos en función de ciertos umbrales, los cuales quedarán completamente determinados en el momento en el que el vehículo esté completamente definido (y que su dinámica conocida nos permita relacionar una velocidad e inclinación con una demanda energética concreta) y se optimicen de manera oportuna. Esto es así debido a que dichos umbrales estarán relacionados con el vehículo concreto a tratar, en nuestro caso, de dimensiones y peso conocidos, y son dichos umbrales los que, para un vehículo dado, trataremos de obtener para conseguir minimizar el consumo energético. Las condiciones para los cambios de estado definidos serían las siguientes: Parada Sin demanda del subsistema de tracción Arranque / Salida / Marcha Atrás Demandas menores a X1 (con demanda de tracción) Velocidad Crucero Baja Demanda aproximadamente constante superiores a X1 y menores a X2 Velocidad Crucero Media Demanda aproximadamente constante superiores a X2 y menores a X3 Velocidad Crucero Alta Demanda aproximadamente constante superiores a X3 Aceleración Moderada Variación creciente en la demanda con pendiente >= P1 durante más de 5 ciclos (siempre que no supere X3) Aceleración Alta Variación creciente en la demanda con pendiente >= P2 durante más de 5 ciclos (o >= P1 si demanda > X3) Frenada Variación decreciente en la demanda durante más de 5 ciclos (o Acel. Frenada < F1) Tabla 5 - Condiciones para cambios de estado De igual forma, en primera instancia podríamos diferenciar los diferentes funcionamientos de cada proveedor en cada uno de los estados definidos. 27 Optimización ción del consumo de combustible en un vehículo híbrido serie Fernando Avilés Calvete MOIGE 2011 Obviamente, éstos deberían ser detallados una vez los proveedores se encontrasen perfectamente modelados. Parada Arranque/Salida/Marcha Atrás Aceleración Moderada Velocidad Crucero Baja Velocidad Crucero Media Aceleración Alta Velocidad Crucero Alta Frenada Motor Baterías Ultracondensadores OFF OFF ON ON ON ON ON OFF ON ON Recibiendo Recibiendo ON OFF ON OFF/Recibiendo OFF OFF ON ON/Recibiendo OFF OFF/Recibiendo OFF ON OFF Recibiendo Tabla 6- Funcionamiento de cada proveedor según el estado Debido a las características especialmente sensibles a los cambios de algunos de los elementos del vehículo, sobre todo de las baterías, sería interesante evitar la mayoría de los cambios de estado innecesarios como serían, por ejemplo, los provocados por pequeñas oscilaciones alrededor alrededor de uno de los umbrales definidos. Esto alargaría la vida de las baterías dotando al vehículo de un sistema más robusto. Para ello hemos decidido definir una curva de histéresis (cualidad de la curva de carga y descarga de ciertos elementos magnéticos), es decir, no se tiene en cuenta el mismo umbral para pasar del estado A al estado B, que para pasar desde el B hacia el A. Ilustración 8 - Representación de la curva básica de histéresis En principio se habría definido una histéresis h del 10% (es decir, si para pasar del estado A al B se necesita X, para volver del B al A se precisaría 1,10X), 1,10X), aunque dicho valor no sería definitivo hasta que la fase de pruebas nos proporcionase proporcionase los primeros resultados concluyentes. Lo realmente interesante no sería que influyera en los resultados si no que no lo hiciese, ya que esto permitiría mejorar la vida de las baterías (reduciendo los cambios de estado) sin necesidad de penalizar el sistema (obteniendo resultados similares). 28 Optimización ción del consumo de combustible en un vehículo híbrido serie Fernando Avilés Calvete MOIGE 2011 4.2.Modelado ado del motor de combustión Para el modelado del motor de combustión, nos basamos en el modelo real que se utilizaría en el vehículo, el SCANIA DC9 74A 294kW (más información en anexo), un motor diésel, con capacidad para proveer hasta 294KW de forma instantánea. instantánea. Los motores se caracterizan a través de una serie de gráficos que muestran su consumo y eficiencia en función de la velocidad (en revoluciones por minuto) y la carga (también llamada par, medida en N·m). Nuestro objetivo es modelar este sistema y es es a partir de estos gráficos cómo podríamos determinar una serie de puntos de óptimo funcionamiento en función de sus diferentes respuestas. Podemos ver algunos ejemplos de este tipo de gráficos a continuación: Ilustración 9 - Ejemplo de gráficos de eficiencia y rendimiento de un motor de combustión 29 Optimización del consumo de combustible en un vehículo híbrido serie Fernando Avilés Calvete MOIGE 2011 Éstos gráficos, lógicamente, son diferentes y característicos para cada motor, luego cada uno de ellos tendrá, como llamaremos en este trabajo, unos puntos de óptimo funcionamiento diferentes. Estos puntos de óptimo funcionamiento pueden obtenerse obteniendo la relación entre el consumo y la cantidad de energía generada en cada punto. Para ello podemos contar con un mapa completo como los vistos anteriormente y seleccionar los puntos más significativos. Estos datos para nuestro motor en cuestión se muestran en la tabla mostrada de la página siguiente. 30 Optimización del consumo de combustible en un vehículo híbrido serie 100% Carga 75% Carga 50% Carga Fernando Avilés MOIGE 2011 Calvete Velocidad (rpm) 600 700 800 900 1000 1100 1200 1300 1400 1500 1600 1700 1800 1900 2000 2100 Par (Nm) 955 1091 1194 1326 1480 1649 1830 1873 1842 1795 1731 1651 1560 1478 1404 1337 Consumo (g/kWh) 213 214 209 202 197 194 199 201 202 204 205 208 209 213 214 221 Salida (KW) 60 80 100 125 155 190 230 255 270 282 290 294 294 294 294 294 Par (Nm) 716 818 896 995 1110 1237 1373 1405 1382 1346 1298 1238 1170 1109 1053 1003 Consumo (g/kWh) 207 209 207 207 199 197 197 197 194 195 198 203 205 207 213 223 Salida (KW) 45 60 75 94 116 142 172 191 202 211 217 220 220 220 220 220 Par (Nm) 478 546 597 663 740 825 915 937 921 898 866 826 780 739 702 669 Consumo (g/kWh) 212 207 204 200 198 196 195 200 198 199 202 203 210 216 224 238 Salida (KW) 30 40 50 62 77 95 115 127 135 141 145 147 147 147 147 147 Tabla 7 - Tabla resumen con puntos de funcionamiento (par, rpm, consumo, salida) del motor de combustión 31 Optimización del consumo de combustible en un vehículo híbrido serie Fernando Avilés Calvete MOIGE 2011 En la tabla presentada, el concepto de “carga” se refiere al par máximo al que puede funcionar el motor de combustión a esa velocidad (rpm) concreta. Tenemos, por tanto, perfectamente definidos 48 puntos de funcionamiento de los que, para nuestra aplicación, seleccionaremos aquellos que posean una mejor proporción de potencia entregada en función del consumo de combustible. Es decir nuestro objetivo será obtener los puntos donde es mínimo el valor de: 1 … 48 O lo que es lo mismo, el mayor valor en: 1 … 48 Donde es cada uno de los 48 puntos conocidos descritos en la tabla anterior. Para ello, a partir de una simulación previa, clasificamos dichos puntos en rangos de potencia provista. El objetivo de esta clasificación es comparar de manera justa los factores a minimizar, puesto que es evidente que los mejores resultados se obtendrán siempre para altas potencias. Una forma de entender esto es compararlo con un vehículo convencional, cuyo consumo siempre es menor en carretera que en un recorrido urbano, pese a que la potencia a generar sea menor, debido principalmente a que la aceleración y deceleración son menos bruscas. Así pues, dividiendo los puntos en varios subgrupos obtendremos los 4 puntos entre los que nuestro modelo del motor se moverá durante nuestra simulación: Mejores resultados: Hasta 65KW i 36 18 1 Relación 3,202614 3,486526 3,551859 Par 663 818,25 955 Rpm 900 700 600 Mejores resultados: Desde 65KW hasta 120 KW KW 62,449 59,9451 59,9686 i 39 21 38 Mejores resultados: Desde 120KW hasta 200 KW i 6 24 23 Relación 1,021925 1,030753 1,142887 Relación 1,696926 1,713014 2,064921 Par 915 1110 824,5 KW 114,914 116,17 114,914 Mejores resultados: Desde 200KW en adelante Par Rpm KW i Relación Par 1649 1100 189,838 11 0,707241 1731 1404,8 1300 191,122 12 0,708106 1651 1372,5 1200 172,37 13 0,711181 1560 Tabla 8 - Mejores resultados según rangos de potencia definidos 32 Rpm 1200 1000 1100 Rpm 1600 1700 1800 KW 289,859 293,741 293,878 Optimización del consumo de combustible en un vehículo híbrido serie Fernando Avilés Calvete MOIGE 2011 4.3.Modelado de las baterías De igual modo que con el motor, para modelar las baterías nos basaremos en el elemento real que se instalará en el vehículo, es decir, el modelo Thunder Sky LiFeYPO4 Battery 40 Ah. Tras un estudio previo de las necesidades energéticas del vehículo y teniendo en cuenta las dimensiones conocidas del vehículo, se determina utilizar 564 módulos de este tipo, estando dispuestas como 3 filas en paralelo con 188 módulos en serie en cada una de ellas. Las características del conjunto pueden determinarse fácilmente (para más información ver anexo) obteniéndose: Característica Tensión nominal Potencia nominal carga/descarga Eficiencia potencia nominal Potencia nominal real Potencia máxima carga/descarga Eficiencia potencia máxima Potencia máxima real Potencia pico descarga Valor 600V 36 KW 95,24% 34,28KW 216 KW 76,92% 166,14 KW 1,44 MW Eficiencia potencia pico 33% Potencia pico real Capacidad total del conjunto 479,95 KW 72,2 KWh Capacidad útil del conjunto (70%) 57,7 KWh Resistencia equivalente del conjunto 0,5 Ω Tabla 9 - Características conjuntas del banco de baterías utilizado A partir de estos datos podemos modelar fácilmente la batería pues conocemos la capacidad total que tiene, el rango de velocidades de carga y descarga a las que puede funcionar y, consecuentemente, el rango de potencias. No obstante, hay que tener en cuenta que las baterías son elementos de rápido “envejecimiento”, tecnológicamente hablando, luego hay que evitar que su estado de carga (SoC – State of Charge o DoD – Deep of Discharge, en adelante) baje de los niveles marcados por el fabricante para alargar su vida. De igual forma, dicha vida puede ser medida en ciclos de carga y descarga (entre 3000 y 5000 ciclos para este modelo según las especificaciones del anexo), es por eso que se introdujo en el modelo la histéresis vista unas páginas atrás, con intención de evitar el exceso de alternancia entre ciclos de carga y descarga de manera precipitada. 33 Optimización del consumo de combustible en un vehículo híbrido serie Fernando Avilés Calvete MOIGE 2011 4.4.Modelado de los ultracondensadores Es muy simple modelar los ultracondensadores una vez han sido modeladas las baterías puesto que, al ser también elementos de almacenaje y provisión energética, bastará tener en cuenta sus diferentes características. En este caso, como ya se ha comentado en capítulos anteriores, las principales características es su rápida adaptabilidad/respuesta a las demandas del sistema, una vida mucho más larga (en torno a millones de ciclos de carga y descarga frente a los miles de las baterías) y la no necesidad de evitar un bajo SoC. El modelo concreto a utilizar será el BMOD0110 P048 de Maxwell Technologies (especificaciones en anexo correspondiente). En nuestro caso concreto, se dispondrán 30 módulos en 2 filas en paralelo con 15 de ellos en cada una. De este modo, el conjunto quedará caracterizado de la siguiente forma: Característica Tensión máxima Tensión mínima Corriente (constante) Potencia back up (durante 10seg) Resistencia total Valor 700V 550V 166A 100 KW 0,0713Ω Capacidad total Tiempo máximo de carga/descarga 14,7 F 10 segundos Tabla 10 - Características conjuntas del banco de ultracondensadores utilizado De forma similar a lo realizado en el apartado anterior, el modelado del conjunto es tarea sencilla una vez disponemos de los datos necesarios, en este caso capacidad total y potencia de pico generada (además del tiempo de funcionamiento máximo en caso de proveer potencia de pico). Antes de continuar, cabe destacar una vez más las diferentes velocidades de carga y descarga entre supercondensadores y baterías. En el caso de las baterías, la potencia de pico establecida no se alcanza hasta unos segundos después de solicitarla, en el caso de los ultracondensadores es casi inmediato. Por el contrario éstos últimos tienen una capacidad de almacenamiento (para el mismo volumen) mucho menor, debido a su menor densidad energética. Así pues, una vez definidos todos los elementos que intervendrán en nuestro sistema así como una primera versión configurable del mismo, procederemos a simular diferentes entornos que pongan a prueba el mismo y nos permitan obtener los resultados que nos proporcionen la versión óptima del mismo. 34 Optimización del consumo de combustible en un vehículo híbrido serie Fernando Avilés Calvete MOIGE 2011 4.5.Modelo matemático Finalmente, nuestro modelo completo de control puede resumirse en: • Índices instante temporal 0 … ! (0 será el instante inicial de cada ciclo y el final) ", $ estado / modo de operación 0 … 7! (ver apartado 4.1) punto de funcionamiento del motor 1 … 4! (ver apartado 4.2) • Datos y variables de estado Presentaremos los datos y variables de estado que presentaremos de forma conjunta agrupadas según el contexto donde se definen. De esta forma será más sencillo comprender la necesidad de cada una de ellas y lo que representan en nuestro modelo sabiendo diferenciar en cada caso que las variables de estado serán aquellas que será necesario recalcular para cada instante de tiempo y los datos serán conocidos e invariables a lo largo de toda la simulación. Estados & ' 1, 0, en caso de estar en el estado " en el instante 3 en otro caso Cambios de estado &4 ' 1, 0, si es posible pasar del estado " al estado $3 en otro caso Sería equivalente a lo visto en la Tabla 4 donde cada cruz será un 0 y el resto valdrá 1. 7&4 ' 1, 0, si se dan las condiciones para pasar de estado " a estado $ en instante 3 en otro caso Donde deberían recalcularse para cada instante excepto, lógicamente, si &4 0. Generales 8 demanda energética del sistema en el instante 9 aceleración del sistema en el instante tiempo transcurrido desde el inicio del sistema en el instante en horas 35 Optimización del consumo de combustible en un vehículo híbrido serie Fernando Avilés Calvete MOIGE 2011 Baterías :;< potencia/carga proporcionada por las baterías en el instante =;< estado de carga de las baterías en el instante :;>á@ potencia/carga máxima posible que pueden proporcionar las baterías en cada instante :;ABA potencia/carga total de las baterías Ultracondensadores :CD< potencia/carga proporcionada por los ultracondensadores en el instante =CD< estado de carga de los ultracondensadores en el instante :CD>á@ potencia/carga máxima posible que pueden proporcionar ultracondensadores en un instante :;ABA potencia/carga total de los ultracondensadores Motor :E< potencia/carga proporcionada por el motor en el instante E< consumo del motor en el instante en gramos por kWh F potencia proporcionada por el motor en el punto de funcionamiento GF consumo en gramos por kWh del motor en el punto de funcionamiento • Variables =;>íI estado de carga de las baterías mínimo aceptado =CD>íI estado de carga de los ultracondensadores mínimo aceptado JK Valor umbral entre Arranque/Salida/Marcha Atrás y Velocidad Crucero Baja JL Valor umbral entre Velocidad Crucero Baja y Velocidad Crucero Media JM Valor umbral entre Velocidad Crucero Media y Velocidad Crucero Alta NK Valor umbral para entrar en el estado Frenada K Valor umbral para entrar en el estado Aceleración Moderada L Valor umbral para entrar en el estado Aceleración Alta 36 los Optimización del consumo de combustible en un vehículo híbrido serie Fernando Avilés Calvete MOIGE 2011 • Banderas Serán las encargadas de indicar si se superan o no los diferentes umbrales, tanto para demanda energética como para aceleración o frenada, en cada instante de tiempo. 1, si 8 Q JP 3 OP ' para 1 … 3, S 0, en otro caso OT ' VP ' 1, 0, VT ' 1, 0, si 8 U 0 3 , en otro caso S 1, 0, si 9 X NK 3 , en otro caso S si 9 Q P 3 para 1 … 2, S en otro caso • Cotas de las variables Conjunto de valores que podrán tomar las variables que iremos alterando en nuestro ejercicio de optimización. 0 X JK X JL X JM NK X 0 X K X L 0% X =;>íI X 100% 0% X =CD>íI X 100% Ecuación 1 - Expresiones para las cotas de las variables definidas • Restricciones y relaciones entre variables Presentaremos primero aquellas relacionadas con los estados y los cambios entre éstos y, posteriormente, todas aquellas relacionadas con el balance energético. Estados Obligatoriamente, el sistema estará en 1 y sólo 1 estado en cada instante de tiempo. [ Z & 1, &\T S Ecuación 2 – Restricción sobre el número de estados simultáneos Cambios de estado Para estar en un estado concreto es necesario: estar en un estado anterior que disponga de la capacidad para pasar a ese otro estado y que se cumplan en ese instante las condiciones necesarias para dicho cambio. & [ Z 4 · 4& · 7&4 , 4\T S, S" Ecuación 3 – Restricción para los cambios de estado 37 Optimización del consumo de combustible en un vehículo híbrido serie Fernando Avilés Calvete MOIGE 2011 Condiciones para cambios de estado Cada uno de los posibles cambios de estado (&4 1^ está asociado a unas determinadas condiciones. Éstas se encuentran directamente relacionadas con los umbrales definidos y se determinarán en función de las banderas encargadas de representar la superación o no de los mismos. Cabe destacar que nuestro modelo no tendrá en cuenta el número de ciclos de los que hablamos en la Tabla 5, puesto que ese supuesto solo tendrá sentido en las pruebas reales, en las que el tiempo ente entrada de datos es de milisegundos. En nuestras pruebas las entradas estarán más distanciadas en el tiempo, al tratarse de simulaciones, con lo que lo óptimo será actuar de forma inmediata tras cada entrada. 7TT 1 _ OT 7LK `1 _ VT a · `1 _ VK a · `1 _ OK a 7TK OT 7LM `1 _ VT a · `1 _ VK a · OK · `1 _ OL a 7KT `1 _ OT a · `1 _ VT a · `1 _ VK a `1 _ VT a · `1 _ VK a · OL · `1 _ OM a 7Lb 7K[ VT 7L[ VT 7KL VK 7Lc `1 _ VT a · `1 _ VK a · OM 7KK OT · `1 _ VT a · `1 _ VK a 7Ld VL 7LL `1 _ VT a · `1 _ VL a · VK 7c[ VT 7M[ VT 7ML VK 7cd VL 7MM `1 _ VT a · `1 _ VK a `1 _ VT a · `1 _ VL a 7cc VL 7bd 7[T `1 _ VT a · `1 _ OT a 7b[ VT 7[[ VT 7bL VK 7[K `1 _ VT a · OT · `1 _ OK a 7d[ VT 7[b `1 _ VT a · OL · `1 _ OM a 7bb `1 _ VT a · `1 _ VK a 7[M `1 _ VT a · OK · `1 _ OL a 7dL `1 _ VT a · `1 _ VL a 7[c `1 _ VT a · OM 7dd VL Ecuación 4 – Expresiones de las diferentes condiciones para los cambios de estado 38 Optimización del consumo de combustible en un vehículo híbrido serie Fernando Avilés Calvete MOIGE 2011 Satisfacción de la demanda Obviamente, en cada instante deberá de satisfacerse la demanda entre los 3 proveedores energéticos. La combinación de la energía provista podrá ser mayor que la demanda, puesto que, como hemos visto, la energía sobrante podrá ser almacenada bien por baterías o bien por ultracondensadores. 8 X :;< e :CD< e :E< , S Ecuación 5 – Restricción de satisfacción de la demanda Baterías En cada instante de tiempo, será necesario actualizar el estado de carga de las baterías, manteniéndose éste entre el mínimo definido y el 100% y siendo la cantidad aportada/recibida por éstas la equivalente a la diferencia entre la energía requerida y la provista por motor y ultracondensadores. Evidentemente, dicha cantidad provista está limitada por el máximo conocido del modelo de baterías estudiado. :;< X :;>á@ , =;< =;<fg _ S :;< , :;ABA :;< 8 _ :E< _ :CD< , =;>íI X =;< X 100%, S S S Ecuación 6 – Expresiones y restricciones relacionadas con las baterías Ultracondensadores El caso de los ultracondensadores es análogo al de las baterías, aunque su funcionamiento final sea distinto debido a su diferente capacidad de almacenamiento (mucho menor a las baterías) y capacidad de provisión instantánea de energía (mucho mayor que en ellas), las ecuaciones serían idénticas. :CD< X :CD>á@ , =CD< =CD<fg _ S :CD< , :CDABA :CD< 8 _ :E< _ :;< , =CD>íI X =CD< X 100%, S S S Ecuación 7 – Expresiones y restricciones relacionadas con los ultracondensadores 39 Optimización del consumo de combustible en un vehículo híbrido serie Fernando Avilés Calvete MOIGE 2011 Motor En el caso del motor simplemente hay que destacar que para cada estado, tendrá definido un punto de funcionamiento de los 4 seleccionados en el modelo visto en el apartado 4.2. Así pues, bastará con seleccionar el valor de potencia/consumo de cada punto en cuestión de forma que en cada estado, quede totalmente definidos los valores de dichas magnitudes. :E< K · `L e M a e L · b e M · d e b · c , GE< GK · `L e M a e GL · b e GM · d e Gb · c , S S Ecuación 8 – Expresiones relacionadas con el motor de combustión interna • Función Objetivo Finalmente, la función objetivo de nuestro problema de optimización no será otra que la correspondiente a minimizar el consumo de combustible a lo largo de toda la simulación, para lo que habrá que multiplicar y sumar para cada instante los factores encargados de proporcionarnos el valor del consumo energético en gramos de combustible. h í Z :E< · GE< · i _ jK ^ \T Ecuación 9 - Expresión para el cálculo de la función objetivo Donde la potencia está medida en kW, el consumo en gramos por kWh y el tiempo en horas. 4.6.Observaciones sobre el modelo Una vez presentado el modelo completo, es conveniente destacar que realmente no hay restricciones propiamente dichas. Todas las expuestas están relacionadas entre sí y, a su vez, todas dependen de las cotas de las variables del problema. Es fácil observar esto una vez que se realiza la primera prueba sobre el modelo y puede comprobarse que, para cualquier valor de las variables que esté dentro de las cotas establecidas, se obtiene un resultado válido. Por otro lado puede observarse que, al ser, tanto la función objetivo como las restricciones, no lineales, el modelo aquí presentado es No Lineal y requiere de una gran carga de operaciones, en el apartado siguiente ilustraremos las mismas y explicaremos el método utilizado para poder llevar a cabo de forma eficiente su simulación. 40