Curso Control de Temperatura
Anuncio

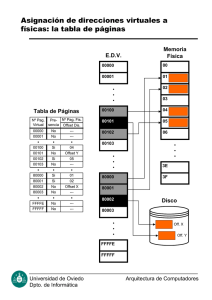
Curso Control de Temperatura OMRON ELECTRONICS S.A. índice Pág. C Curso Bá Básico i ... 3 Pág. S l Selección ió d de producto d t ...74 Método de control ... 7 por método de control ...75 Salida ...38 por sonda ...77 Sonda ...50 por salida ...82 Funciones de alarma ...59 por alarma ...83 Comunicación ...65 por interface ...84 Curso Básico de Control de Temperatura Control Feed Feed-Back Back (realimentado) y controladores OMRON ¿Qué es Control de temperatura? Control secuencial Control Feed Feed-back back (lazo cerrado) Descripción/ Es un control secuencial pasoEs un control que detecta Palabras a paso de acuerdo con las constantemente el error entre claves ordenes previamente la consigna y el valor real y lo programadas. corrige. Carácter Cualitativo Discontinuo Por ejemplo Tiempo Número de piezas Presencia etc. Cuantitativo Continuo Caudal Presión Temperatura Control Feed-back (Realimentación) Perturbación MV TC e = SP-PV Consigna SP - + Dispositivo de salida Lógica de control Carga Controlada Sonda Temperatura real PV Control ideal ¿Cuál es la definición de "control control bueno bueno" para un control realimentado Feed-back? Alcance a la consigna Rápido y/o correctamente Corrección de error ante perturbación externa. Rápido y/o correctamente Consigna "Step-response" Consigna g "Disturbance" Método de Control es el núcleo de control TC + - Control Standard Pág. ON/OFF P PI PD PID ... 8 ...12 12 ...20 ...81 ...22 Pág. 2-PID A to t ning Auto-tuning Self-tuning Fine-tuning ...25 ...29 C t l especial Control i l ...30 Pág. ...33 Calor / Frío Cascada ...34 ...37 Control ON/OFF Es un control sencillo y económico. económico TC MV=100% MV=0% : PV<SP : PV>SP Pico o sobrepasamiento: Overshoot Se genera un "Overshoot" Overshoot debido a un exceso de energía aplicada para alcanzar el SP (consigna). T (ºC) Overshoot PV SP Step-response t (seg.) Oscilación : Hunting También puede producirse una oscilación o "Hunting" Hunting después de haber alcanzado el SP T ºC SP MV % 100% (todo) 0% (nada) PV Hunting tiempo Ciclo de ON/OFF muy rápido Histéresis Medida p para alargar g el ciclo de ON/OFF. T ºC Desventaja: D t j Hunting grande PV SP Histéresis tiempo MV % 100% (todo) 0% (nada) Ciclo más largo Control P Proporciona P i lla salida lid (MV : 0 a 100%) d dentro t d de un determinado rango (Pb) en función del error (e). TC MVp = 100 Pb e +M0 Acción P T (ºC) OFF Pb e ON PV SP 0% (OFF) 50% M0 MV 100% (ON) Proporcionado de la salida (contacto) Salida contacto (Relé, (Relé Tr, Tr SSR, SSR etc.) etc ) e Pb / 2 0 Tiempo proporcional -Pb / 2 ON 0% M0 100% MV OFF Tiempo ON (Ton) ON Periodo de Control (CP) MV = Ton CP OFF 100 t Proporcionado de la salida (Analógica) Salida analógica (4-20mA, (4 20mA 0-20mA, 0 20mA 0-10V, 0 10V etc.) etc ) e Pb / 2 0 Resolución División -Pb / 2 0% M0 100% MV 20 mA Tiempo de retardo E5_X,J,F : 212 divis. / 500ms E5_K, ES100 : 2600 divis. 4 mA 0% 100% MV Salida inversa y directa Salida directa Salida inversa SP PV temp. baja temp. alta Pb ON SP Pb OFF ON MV PV OFF 100% 0% 0% 100% MV Offset El control proporcional puede generar un error de "Offset" entre PV y SP. T (ºC) Offset SP PV t (seg.) ¿Por qué ocurre Offset ? Cuando la banda P seleccionada no es adecuada a la característica térmica-estática del sistema se produce el offset. Curvas de característica térmica-estática MV C 100% 50% 0% B' B A Cada materia tiene distinta característica estática según su capacitancia térmica. Offset 20 (Ambiente) 100 SP 140 Materia A : Fácil de calentar Materia B : Adecuado. Materia C : Difícil de calentar. T (ºc). B' : cambio de la temperatura ambiente. Manual Reset Manual Reset elimina el Offset de forma manual. manual MVp = PV temp. baja SP Pb OFF 0% 50% ON OFF MV 100% 0% ON MV 100% OFF M0 e +M 0 temp. alta ON MV 100% 100 Pb 0% Control P+I I:C Corrige el error acumulado de forma f automática. á MVi T (ºC) = 100 Pb SP Offset : e Corrección automática PV t (seg.) 1 Ti e dt Control P+D D : Corrige C i ell error instantáneo i t tá debido d bid a perturbaciones externas. T (ºC) MVd Perturbación : e SP PV Corrección t (seg.) = 100 Pb de Td dt Control PID Un sistema integrado. integrado P, P IyD I P D + + PID MV = 100 Pb (e+ 1 Ti e dt + Td de ) dt Los parámetros o constantes PID Comportamiento p de los p parámetros MV= 100 ( Pb 1 e + Ti de e dt + Td dt ) Grande Adecuado Pequeño Inestabilidad (Hunting pequeño) Corrige perturbación Corrección lenta de perturbación Off t Offset C i Offset Corrige Off t Oscilación O il ió Offset Alcance a SP lento Corrige picos y oscilaciones Pico y Oscilación Compatibilidad Las características de alcance a SP y de corrección de perturbaciones no siempre son compatibles. T (ºC) T (ºC) SP Correcto Hunting Overshoot / Hunting SP Correcto Corrección lenta Offset / Alcance lento Step-response Perturbación t (seg.) Step-response Perturbación t (seg.) 2-PID de OMRON Feed-foward F df d ((realimentación li t ió anticipativa): ti i ti ) es un ffreno constante que previene sobrepasamientos (picos) La lógica es un constante. (Alfa) FF SP Sólo se efectúa sobre SP. (Sólo para Overshoot) + e - PID Mientras la lógica PID controla alcance a SP,Offset y Hunting Perturb. + MV + + Y lo resta del MV. Sirve para frenar el Overshoot. Constante Alfa Alfa es la ganancia de Feed-Foward Feed Foward 1. Ajustar la corrección de perturbación con PID convencional. 2. Ajustar Step-response eligiendo un alfa adecuado (de 0 a 1). T (ºC) alfa=0 SP alfa=1 Alfa correcto Step-response C Correcto t Perturbación t (seg.) Lógica Fuzzy Lógica g fuzzy y es un reajuste j de la corrección realizada ante perturbaciones. Unicamente funciona cuando se produce una perturbación. Cuando el PV se desvía del SP después del establecimiento. No actúa ante cambios del SP. T (ºC) 2-PID SP Fuzzy Acelera MV Retiene MV Step-response Perturbación 2-PID 2-PID + Fuzzy Resumen PID Demasiado grande Histerésis Demasiado pequeño - Vida corta de relé P - Hunting I - Corrección lenta de Offset D Corrige demasiado ________ la ________. Periodo de Control - Hunting Alfa - Alcanza demasiado _____ al SP Auto-tuning Método Ciclo de Límite Método Step-Response Step Response Pc (seg) PV SP SP L' (seg) A PV R (ºc/seg) ON MV P= 262 FS OFF Tiempo ×A I= Pc 2 Pc D= 8 L (seg) ON MV P = 82 RL' Ti Tiempo I = 2 L' D = 0.5 L' Self-tuning El controlador l d d decide id por síí mismo i cuándo á d reajustar j llos parámetros PID. SRT (Step Response Tuning) Cuando se cambia el SP DT (Disturbance Tuning) Cuando se detecta una perturbación. HT (Hunting Tuning) Cuando se detecta Hunting u oscilaciones. oscilaciones SRT SRT renueva el PID ante Pb cambios de SP. 1.27 SPnuevo 1) SPant. SPnuevo 2) Error en el momento del cambio de SP es mayor que : SPanterior Pb 1.27 + 4 L (min) 3) Cambio del SP hacia arriba en control inverso (control de calor), calor) hacia abajo con control directo (control frío). Banda 4) Al cambio PV tiene que estar estable dentro de la banda estable. PV R (%/min) Tiempo PID renovado DT y HT DT renueva el PID; 1) Cuando PV excede el rango estable tras haberse establecido con el PID antiguo. 2) Después de que el SP se ha cambiado fuera de las condiciones SRT tras haberse establecido con el PID antiguo. Pi 2 Pico Banda estable Pico 1 Cambio SP <Pb 1.27 *El número de picos que se generan hasta que se establezca debe ser inferior a 4. HT renueva el PID; Si se generan más de 4 picos fuera de SRT. Estable Pico 2 PID renovado PID renovado Pico 4 Banda estable Pico 1 Pico 3 PID antiguo ( Inestable ) PID renovado Fine-tuning Reajusta los PID de una forma manual e intuitiva. intuitiva Determinar las características que se desean reajustar seleccionando de entre: 1) Eliminar Pico (Overshoot) 2) Evitar Hunting 3) Mejorar el tiempo de establecimiento. Dos de ellos se pueden optimizar a la vez. Eliminar Pico Seleccionar el grado de optimización: Mucho,, medio,, un poco, p , etc. Mejorar tiempo Evitar Hunting Control Calor / Frío Los procesos exotérmicos (por sí mismos generan calor) necesitan de ambas acciones: enfriamiento y calentamiento. Procesos químicos exotérmicos. Máquina extrusoras de plásticos. Calor Frío Banda muerta / solapada Banda solapada Banda muerta Control preciso Ahorro de energía Calor y frío actúan a la vez MV MV 100% 0% Calor y frío no actúan a la vez Calor Frío 100% 0% T (ºc) Banda solapada (Overlap band) 100% Calor Frío 0% 100% 0% T (ºc) Banda muerta (Dead band) Coeficiente de frío Aún teniendo el mismo MV, MV el comportamiento de frío puede diferir del comportamiento de calor. MV 100% MV Calor Frío 100% 100% Calor 100% Frío 0% 0% T (ºc) 0% 50% 0% T (ºc) Control Cascada En este sistema la salida del primer controlador proporciona el SP del segundo controlador. Lazo Secundario Fluctuación Lazo Principal Calor Aíre Frío Sensor 2 Sensor 1 Aíre Caliente Salida TC + - es el interface de salida. Pág. Tipo de salida Elemento de calor Salida analógica Válvula motorizada ...40 ...42 ...45 ...46 Salida de TC y actuadores TC Señal de salida Actuadores Señal Carga Energía Relé SSR Tensión Analógico Pulsos para válvula Contactor SSR externo Controlador ciclo * Controlador fase * Electro-válvula Válvula motorizada * Energía eléctrica Caudal de líquido Caudal de aire Presión Salida de TC (1) Relés Control directo de carga eléctrica o contactor. (máx. 5A : E53-R). Para un sistema con baja frecuencia de operación. Relé de estado sólido Control directo de carga eléctrica o contactor. (máx. 1A) Para un sistema con alta frecuencia de operación. Tensión Control de relé de estado sólido externo Salida de TC (2) Corriente (Analógica) Control de fase de carga eléctrica, electro-válvula. etc. Para un sistema con probabilidad de perturbación. Tensión (Analógica) Pata variador de velocidad, electro-válvula, etc. Pulsos para válvula motorizada. Para válvula motorizada. Control de elemento de calor (1) Control de contacto Sencillo y económico Control del tiempo en que permanece cerrado el contactor. TC 50% ON Periodo de control TC Señal de salida Actuador Relé directo SSR directo Tensión SSR externo 2 seg. P.ej. MV = 50% Control de elemento de calor (2) Control de ciclo Rápido y sin ruido Control del número de ciclos en una operación. TC Controlador de ciclo 50% ON Tiempo de operación Señal de salida Actuador Salida analógica (4-20 mA) Controlador de ciclo G3PA 0.08 seg. P.ej. MV = 50% Control de elemento de calor (3) Control de fase Control de fase de ON en medio ciclo. Alta precisión TC Controlador de fase 50% ON Medio ciclo Señal de salida Actuador Salida analógica (4-20 mA) Controlador de fase G3PX P.ej. MV = 50% 0.01 seg. Productos OMRON Control de caudal Electro-válvula Se utiliza para controlar el caudal de aire o líquido. 20 mA Escalones 4-20mA Posicionador 4 mA 0% 100 % MV Entrada de caudal (Presión constante) Movimiento mecánico Salida de caudal Válvula motorizada Es un sistema Servo ON /OFF Controla la apertura (posición) de la válvula mediante pulsos de apertura / cierre. Realimentación de posición R Abrir M Cerrar 1)) Control flotante 2) Control realimentado Control flotante El TC manda d all motor t los l pulsos l Abrir o Cerrar. Cerrar El rotor t d de lla válvula ál l gira i d de acuerdo con el par del motor. M TC Abrir Total apertura Pulso Abrir Pulso Cerrar 100% t 0% t t : Tiempo total de recorrido (Travel Time) 50% t/2 25% t/4 Control realimentado El TC manda d all motor t llos pulsos Abrir o Cerrar. Cerrar TC Abrir El rotor de la válvula gira de acuerdo con el tiempo de los pulsos. M Pulso Cerrar Pulso Abrir Realimentación para el reajuste de la apertura El eje del rotor transfiere su posición al poteciómetro. Calibración de la Válvula Control flotante Medir el tiempo total de recorrido Control realimentado Medir los valores límite del potenciómetro Sonda TC + es ell interface i f de d entrada - Pág. Termopar Termorresistencias Entrada universal ...52 ...53 ...56 Sondas de temperatura Termopar Baja temperatura : J, K, E, T Alta temperatura : R, S, B, W, PL-II, N Termorresistencia Pt100 Termopar Pro Contra Amplio rango de medida Estructura sencilla Económico Cable de compensación necesario Termorresistencia Alta precisión Estable Más linear que termopar Costoso Velocidad no alta Impedancia flotante Termopar Efecto Seebeck materia A Unión caliente Unión fría Corriente T2 T1 materia B V=K(T2-T1) v temp Termorresistencia Variación de resistencia por temperatura r r temp Puente Wheatstone r R1 Cuando , V=0 ; V R2 Vref R3 r = R1×R2 / R3 Termorresistencia (Problema y su medida) Resistencia flotante Cuando se alarga el cable aparece la llamada resistencia flotante. rl TC rl Termorresistencia de tres hilos Para eliminar la resistencia flotante. r rl rl R1 rl Cuando, V=0; R3×(r+rl) = R1×(R2+rl) r= R1×R2/R3+·(R1-R3)rl/R3 Si R1=R3; R2 R3 r= R1×R2/R3 Rango de medida 2500 2000 1500 Temperatura 1000 ºC 500 0 -500 High Low K J R S E T B Sonda W L-II P N 00 1 Pt Sonda universal Para valores de p proceso g generales Presión Humedad Temperatura Nivel líquido, etc Señal de salida Corriente (4-20mA, (4 20mA 0-20mA, 0 20mA etc.) etc ) Tensión (1-5V, 0-10V, etc.) Sensor infrarrojo compatible con termopar (mV) Producto OMRON : ES1A Escala Es necesario convertir / escalar la señal analógica normaliza al valor físico de la variable correspondiente. Señal 20 mA 4 mA min. max.. Fondo escala Display Valor físico ºC Bar, ºC, Bar %, % m, m etc. etc Precisión de entrada Precisión Error entre la temperatura real y el valor de display 1: Valoración de error en relación al fondo de escala (E5C2, E5_S,etc.) 2: Valoración de error en relación al valor de indicación (E5_X, J, K, etc Periodo de muestreo Viene limitado por las prestaciones del microprocesador del TC. Rápido --> Control rápido, influencia de ruido Lento --> Medida estable, control lento Funciones de alarma para la seguridad del sistema Tipos de alarma (1/2) Límite superior Baja SP Relativo Alarma Alta Baja 0 ºC Alarma Alta 0 ºC Absoluto Alta Absoluto Límite inferior Baja Alarma SP Relativo Alta Baja Alarma Tipos de alarma (2/2) Límite te supe superior o e inferior e o Baja SP Relativo Alta SP Relativo 0 ºC Absoluto Rango Baja Baja Alta Alta Standby La alarma es activada cuando se cumple p la condición de activación por segunda vez. Es una medida para evitar falsas alarma en los arranques, puesto que al comienzo del proceso, la temperatura de la sonda suele estar a la temperatura ambiente. SP 2 3 2 3 1 Salida de alarma 1 ON Límite superior con standby Límite inferior con Standby Lí it superior Límite i e iinferior f i con Standby. Límite superior absoluto con Standby Límite inferior absoluto con Standby Heater Burnout Alarm Detecta la rotura del lazo de control midiendo la corriente del circuito de carga. Rápido, exacto. Transformador de corriente necesario. Sólo para cargas eléctricas. I1 Bien Cerrar Cerrar i1 I2 Mal i1 i2 rotura i2 La alarma HBA detecta la disminución de la corriente i. Loop Break Alarm Detecta la rotura del lazo de control observando el comportamiento de PV frente a MV. De propósito general, el transformador de corriente no es necesario. Tiempo de detección largo, menos preciso que la alarma HBA. T ºC Tiempo de detección Comienzo MV máx. Fi n SP Banda de Detección Rotura PV LBA OFF LBA ON MV Tiempo *Alarma LBA es simétrica. Comunicación Integra los controladores OMRON con equipos principales. Comunicación serie RS232C Comunicación 1 :1 con equipo principal (PC,PLC, etc.) Distancia máxima :15m RS422 Comunicación 1 : n (máx. 32 controladores + equipo principal) Distancia máxima : 500 m. RS485 Comunicación 1 : n (máx. 31 controladores + equipo principal) Distancia máxima : 500 m 2 hilos Protocolo serie Sincronización : método asíncrono. Longitud de palabra : ASCII 7 / 8 bits Bit de Stop: 2 bits. Detección de error : Paridad Par / Impar FCS (Frame Check Sequence) Equipo principal Controladores Formato X C Comando d llectura t @ 0 0 R X 0 1 fcs * ¶ Respuesta lectura @ 0 0 R X 0 0 Código FCS lazo Código de cabecera: Elegir un R_ de la lista de comandos. Nº de unidad 0 2 5 5 fcs * ¶ Dato leído (4 díg.) Código de respuesta: 00 = OK Comando escritura @ 0 0 W S 0 1 0 2 5 5 fcs Dato a escribir (4 díg.) * ¶ Respuesta escritura @ 0 0 WS 0 0 Código de cabecera. Elegir un W_ de la lista de comandos. fcs * ¶ Código de respuesta: 00 = OK Formato K Comando @ 0 0 2 0 1 0 2 5 5 fcs * ¶ Dato a escribir (4 dígitos) *En caso de lectura, rellenar con "0" Código de dato. Elegir un dato del mapa de datos. Tipo de comando: 1 = lectura, 2 = escritura, 3 = especial . Respuesta @ 0 0 2 0 1 0 0 0 2 5 5 fcs * ¶ Dato leído / escrito (4 díg.) Código de respuesta : 00 = OK Formato Compoway-F Comando STX 00 00 0 XXXX XXXX XXXX XXXX ETX BCC Texto del comando Número de nodo. Código de chequeo Código de fin Código de inicio Respuesta STX 00 00 0 XXXX XXXX XXXX XXXX ETX BCC Texto de respuesta Número de nodo. Código de inicio Código de chequeo Código de fin BCD Comunicación paralelo BCD E/S de PLC Distancia máxima : 2 a 3m PLC Código de operación (4 bits) Dato leído (4 bits) TC TC Datos a escribir (4 bits) VAL : Validez de operación BUSY : Ocupado Protocolo BCD Escritura de datos PLC VAL off : fin PLC Controlador Controlador 1. "Leer 1º díg." 1. Dato a escribir 2. "Escribir 1º díg." 3. VAL on : inicio 6. Dato a escribir 7. "Escribir 2º díg." Lectura de datos 2. VAL on : inicio 4. BUSY on 5. BUSY off T Terminado i d escritura 8. BUSY on 9. BUSY off Terminado escritura 6. "Leer 2º díg." VAL off : fin 3. BUSY on 4. Dato leído 5. BUSY off Terminado escritura 7. BUSY on 8. Dato leído 9. BUSY off Terminado escritura Retransmisión Retransmisión Analógica (4-20mA) Independiente de la salida de control Registradores Impedancia de salida : 600 Límite inferior Límite superior 20 mA 256 Escalones 4 mA Rango seleccionado PV / SP (ºC) MV (%)