01 Reactor
Anuncio

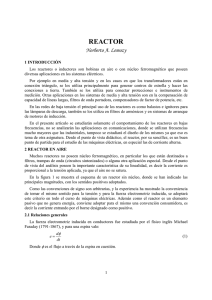
REACTOR Norberto A. Lemozy 1 INTRODUCCIÓN Los reactores o inductores son bobinas en aire o con núcleo ferromagnético que poseen diversas aplicaciones en los sistemas eléctricos. Por ejemplo en media y alta tensión y en los casos en que los transformadores están en conexión triángulo, se los utiliza principalmente para generar centros de estrella y hacer las conexiones a tierra. También se los utiliza para conectar protecciones e instrumentos de medición. Otras aplicaciones en los sistemas de media y alta tensión son en la compensación de capacidad de líneas largas, filtros de onda portadora, compensadores de factor de potencia, etc. En las redes de baja tensión el principal uso de los reactores es como balastos e ignitores para las lámparas de descarga, también se los utiliza en filtros de armónicos y en sistemas de arranque de motores de inducción. En el presente artículo se estudiarán solamente el comportamiento de los reactores en bajas frecuencias, no se analizarán las aplicaciones en comunicaciones, donde se utilizan frecuencias mucho mayores que las industriales, tampoco se estudiará el diseño de los mismos ya que eso es tema de otra asignatura. Desde el punto de vista didáctico, el reactor, por su sencillez, es un buen punto de partida para el estudio de las máquinas eléctricas, en especial las de corriente alterna. 2 REACTOR EN AIRE Muchos reactores no poseen núcleo ferromagnético, en particular los que están destinados a filtros, trampas de onda (circuitos sintonizados) o alguna otra aplicación especial. Desde el punto de vista del análisis poseen la importante característica de su linealidad, es decir la corriente es proporcional a la tensión aplicada, ya que el aire no se satura. En la figura 1 se muestra el esquema de un reactor sin núcleo, donde se han indicado las principales magnitudes, con los sentidos positivos adoptados. Como las convenciones de signo son arbitrarias, y la experiencia ha mostrado la conveniencia de tomar el mismo sentido para la tensión y para la fuerza electromotriz inducida, se adoptará este criterio en todo el curso de máquinas eléctricas. Además como el reactor es un elemento pasivo que no genera energía, conviene adoptar para el mismo una convención consumidora, es decir la corriente entrando por el borne designado como positivo. 2.1 Relaciones generales La fuerza electromotriz inducida en conductores fue estudiada por el físico inglés Michael Faraday (1791-1867), y para una espira vale: e= dφ dt (1) Donde φ es el flujo a través de la espira en cuestión. 1 φ i + + u e - - Figura 1. Reactor en aire. Donde: N: r: u: e: i: φ: Número de espiras. Resistencia óhmica del bobinado. Tensión aplicada. Tensión o fuerza electromotriz inducida. Corriente. Flujo magnético. Debido a que el flujo se dispersa y no es el mismo en todas las espiras, la fuerza electromotriz inducida en toda la bobina se expresa como la suma de las tensiones inducidas en cada una de las N espiras de la misma: N e = e1 + e2 + e3 + ⋅ ⋅ ⋅ + e N = ∑ ek (2) k =1 reemplazando cada una de las fuerzas electromotrices por expresiones del tipo de la (1) queda: e= N dφ dφ dφ1 dφ 2 dφ3 + + + ⋅⋅⋅ + N = ∑ k dt dt dt dt k =1 dt (3) permutando las operaciones derivada y suma, se puede poner: e= N d (φ1 + φ2 + φ3 + ⋅ ⋅ ⋅ + φ N ) = d ∑ φk dt dt k =1 (4) a la suma de los flujos a través de cada una de las espiras se lo denomina “flujo concatenado” λ N λ = φ1 + φ 2 + φ3 + ⋅ ⋅ ⋅ + φ N = ∑ φ k (5) k =1 Utilizando la definición anterior de flujo concatenado, se puede expresar la fuerza electromotriz inducida en toda la bobina, como: e= dλ dt (6) que es una expresión de carácter muy general para la ley de Faraday. Otra forma muy empleada para la ley de Faraday es utilizando un flujo promedio: 2 N φ= ∑φ k =1 k N = λ (7) N de donde se puede despejar λ y reemplazarlo en la (6), lo que da: e=N dφ dt (8) Partiendo de la definición de inductancia: L= λ (9) i Reemplazando el flujo concatenado en esta expresión se puede obtener la dependencia funcional de la inductancia, lo que siempre es conveniente recordar: λ Nφ N Ni N 2 S L= = = = = N 2P = µ 0 µ r N 2 i i i R l R (10) donde: R: P: Reluctancia. Permeancia. µ 0 = 4π 10 −7 [H/m] : Permeabilidad del vacío. µr: Permeabilidad relativa, que, para el aire, vale 1. S: Sección a través de la cual circula el flujo magnético. l: Longitud del circuito magnético. Si bien en un reactor en aire las líneas de fuerza del campo magnético se dispersan por el aire y tanto la sección S como la longitud l no quedan definidas, la expresión (10) es útil por que muestra de que depende la inductancia de una bobina. Si se desea emplearla para calcular la inductancia de una bobina, salvo para un toroide que prácticamente no tiene flujo disperso, habrá que utilizar factores de corrección empíricos. Como ya se verá esta situación cambia si el reactor posee un núcleo ferromagnético. De acuerdo a la definición (9), el flujo concatenado se puede poner como el producto: λ = Li (11) esta es una expresión muy utilizada, especialmente en el estudio circuital de las máquinas eléctricas, reemplazando ésta en la (6) queda: e= d ( L i) dt (12) En las máquinas estáticas, es decir aquellas que no tienen movimiento relativo de sus parte, y lineales, o sea aquellas en las que sus circuitos magnéticos no se saturan y poseen parámetros constantes, como es el caso del reactor en aire; la inductancia L no varía y se puede sacar fuera de la derivada, resultando: 3 e=L di dt (13) expresión muy utilizada en el estudio de los circuitos eléctricos y, por lo tanto, en la teoría circuital de máquinas eléctricas. Para obtener la tensión aplicada u se debe recurrir a un modelo circuital o circuito equivalente. Estos modelos son circuitos eléctricos, formados por elementos ideales, que, vistos desde sus bornes se comportan de una manera semejante al elemento real. La semejanza nunca es perfecta, todos los modelos tienen rangos de validez, que no deben ser olvidados para no cometer errores graves; en caso de duda se deberán realizar verificaciones experimentales. Afortunadamente, en el caso de las máquinas eléctricas, los modelos circuitales más empleados, han sido ampliamente verificados por la práctica. El circuito equivalente de un reactor en aire y para bajas frecuencias, como lo son las frecuencias industriales de 50 ó 60 Hz, es el siguiente: i r + + u - e - Figura 2. Circuito equivalente de un reactor en aire. En este circuito equivalente, la resistencia es la que corresponde al conductor que forma la bobina, medida con corriente continua o calculada con la expresión: r=ρ l s (14) teniendo solamente la precaución de considerar el efecto de la temperatura, que, en general, no es despreciable. Este tema será tratado más detalladamente en próximos capítulos de máquinas eléctricas, donde se estudia la determinación de parámetros. Si la frecuencia fuera superior a unos pocos kilohertz habría que considerar la variación de la resistencia por el denominado efecto Skin o efecto pelicular y también las capacidades parásitas que existen entre espiras y a masa. En general estos efectos, salvo casos muy especiales, tienen muy poca influencia en el funcionamiento de las máquinas eléctricas. A partir del circuito equivalente de la figura 2, se puede escribir la expresión de la tensión aplicada a los bornes del reactor: u = e+ ri (15) Todas las expresiones planteadas hasta ahora son de carácter general y son válidas tanto para corriente constantes como para las variables y con cualquier forma de onda. Pero sin duda las corrientes variables más importantes son las periódicas. 4 2.2 Funcionamiento en régimen periódico Se puede obtener una relación importante y de carácter muy general para la fuerza electromotriz o tensión inducida media cuando el flujo varía periódicamente y tiene simetría de media onda, es decir se cumple que: ⎛ T⎞ f (t ) = − f ⎜ t ± ⎟ ⎝ 2⎠ (16) lo que implica que los valores máximos y mínimos del flujo y de la tensión inducida, son iguales en módulo, figura 3: Figura 3. Flujo y tensión inducida. La tensión inducida vale (8): e=N dφ dt separando variables: e dt = N dφ e integrando entre 0 y T 2 , queda: T Φmáx N 1 2 2N e dt = dφ = 2Φ máx ∫ ∫ T 0 T −Φmáx T 2 2 donde el primer miembro es el valor medio en un semiperíodo, E de la tensión inducida e , y como la inversa del período T , es la frecuencia f , resulta: E = 4 f N Φmáx (17) Expresión muy general que, como ya se dijo, la única restricción es que el flujo y por consiguiente la tensión inducida, tengan simetría de media onda, situación muy común en la práctica. Si se desea obtener el valor eficaz, habrá que multiplicar al valor medio por el factor de forma kf de la onda en cuestión: 5 kf = Valor eficaz Valor medio (18) lo que restringe la expresión obtenida a una onda en particular. E = k f ⋅ E = 4 k f f N Φmáx (19) 2.3 Funcionamiento armónico Sin lugar a dudas el funcionamiento periódico más importante es el armónico, donde las magnitudes varían sinusoidalmente en el tiempo con amplitud y frecuencia constantes. Las ecuaciones que corresponde a esta condición de trabajo son un caso particular de las ya vistas. En efecto si la corriente vale: i = 2 I sin ω t (20) en este reactor en aire, que no tiene saturación, el flujo resultará proporcional a la corriente: φ = k i = Φmáx sin ω t (21) S N l (22) k = µ0 la tensión o fuerza electromotriz inducida resulta: e=N dφ = 2π f N Φmáx cos ω t dt (23) Todas estas magnitudes armónicas son representables fasorialmente y la tensión en bornes, cuyo valor instantáneo está dado por la ecuación (15), se transforma en: U& = E& + rI& (24) Esta ecuación y las anteriores (20), (21) y (23) conducen al diagrama fasorial de la figura 4. . rI . E . U ϕ ψ . I . Φ O Figura 4. Diagrama fasorial del reactor en aire. El valor eficaz de la tensión inducida se puede obtener con la expresión (19). El factor de forma de una onda senoidal vale: kf = Valor eficaz π = = 1,11 Valor medio 2 2 (25) 6 entonces: E = 4 k f f N Φmáx = donde: 2π f N Φmáx 2 (26) 2π = 4 k f = 4,44 2 (27) La expresión (26) es de suma importancia en máquinas eléctricas ya que relaciona el valor eficaz de la fuerza electromotriz inducida, que, en general es muy próxima a la tensión aplicada, con la frecuencia, generalmente constante, y parámetros constructivos como lo son el número de espiras y el valor máximo del flujo, asociado a la inducción máxima por: Φmáx = S Bmáx (28) Si bien esta relación es poco importante en una bobina en aire, ya que tanto la sección como el valor máximo de la inducción variarán según la región del espacio que se considere y no hay restricciones para las mismas, la situación cambia considerablemente cuando hay un núcleo ferromagnético. Como se verá, en este caso la sección y la longitud están bastante bien definidas, y el valor máximo de la inducción queda limitado por la saturación del material, siendo ésta la situación más frecuente en máquinas eléctricas. A partir del diagrama fasorial se pueden obtener los valores de las potencias activa y reactiva que toma el reactor de la línea. Proyectando la tensión U& sobre la corriente I& y sobre la fuerza electromotriz E& . La potencia activa absorbida vale: P = UI cosϕ pero: (29) U cosϕ = rI y reemplazando resulta: P = rI 2 = PCu (30) que es la potencia activa que se disipa en la única resistencia del circuito equivalente de la figura 2. En general a estas pérdidas por efecto Joule producidas en las resistencias de los conductores de las máquinas eléctricas se las denomina “pérdidas en el cobre” aunque algunas veces esos conductores no sean de cobre. Respecto a la potencia reactiva, resulta: Q = UI sin ϕ (31) pero: U sin ϕ = E y reemplazando: Q = EI (32) 7 que es la potencia reactiva en la única reactancia del circuito equivalente de la figura 2. Si bien estas dos deducciones son un tanto obvias, sirven para comparar los resultados que luego se obtienen cuando el reactor posee un núcleo ferromagnético. Dado que el objetivo básico de un reactor es desarrollar en el circuito donde se lo coloca una reactancia inductiva elevada, resulta claro que deberá ser: Q⟩⟩ P Esto equivale a decir que: X ⟩⟩ r por lo tanto la caída de tensión en la reactancia, es decir E& , es mucho mayor que la que se produce en la resistencia rI& . En prácticamente todos los diagramas fasoriales, las caídas de tensión en las resistencias se representan, por razones de claridad en el dibujo, mucho más grande de lo que en la realidad son. Este criterio se aplica a los fasoriales de todas las máquinas eléctricas y no debería ser olvidado por el lector. En algunos casos, lo anterior es tan notable, que hasta es posible despreciar las caídas de tensión resistivas; pero como regla general, se aconseja proceder con prudencia antes de despreciar partes de los circuitos equivalentes de las máquinas eléctricas. 3 REACTOR CON NÚCLEO FERROMAGNÉTICO Es muy común encontrar en los sistemas eléctricos, reactores con núcleo ferromagnético, las formas constructivas más empleadas son los núcleos acorazados, figura 5, de columnas, figura 6 y, para aplicaciones especiales, los toroidales, figura 7. y y c c c Bobina Ventana y y Figura 5. Núcleo acorazado normalizado. Ventana Bobinas y c c y y c Ventana Bobina Figurar 6. Núcleos de columnas. 8 c y En las figuras 5 y 6, y representa a los yugos y c a las columnas. En el dibujo de la derecha de la figura 6, la bobina del reactor está dividida en dos partes iguales, colocadas una en cada columna, esta configuración permite ahorrar material con relación a la de la izquierda, pero su construcción es un poco más laboriosa. Bobina Núcleo Figura 7. Núcleo toroidal. La presencia de un núcleo ferromagnético de alta permeabilidad dispersión del campo magnético, no obstante lo cual, la concatenación considerado será la suma del principal, que circula a través del núcleo aire. Luego, en el estudio de las otras máquinas eléctricas, resultará efectos de estos dos flujos, por ahora no es necesario. reduce notablemente la no es perfecta y el flujo y del que lo hace por el conveniente separar los Los tres fenómenos más importantes que se estudiarán, son: a) Aumento de la inductancia. b) Aparición de pérdidas en el hierro. c) Distorsión en la corriente. 3.1 Aumento de la inductancia La característica que identifica a todos los materiales ferromagnéticos es su permeabilidad relativa muy superior a la unidad, yendo desde un mínimo de alrededor de 100 hasta valores tan altos como 10.000 o más. Como la inductancia (10) depende directamente de esta permeabilidad, se comprende que la presencia del núcleo produzca un considerable aumento de la inductancia de la bobina. Pero otra característica de los materiales ferromagnéticos es que se saturan y a medida que se aproximan a esta situación bajan su permeabilidad, llegando a perder totalmente sus características y a comportarse como el mismo aire o el vacío. Llegar a un extremo de esta naturaleza sería totalmente desventajoso. Como, por definición la permeabilidad, es la relación entre la inducción B y el campo magnético H , ecuación 33 partiendo de la curva de magnetización se puede obtener su variación y la de la inductancia asociada. En la figura 8 se muestra la variación de la permeabilidad, en corriente continua, de una chapa para transformadores, laminada en caliente, calibre 26 (0,47 mm). µ = µ0 µr = B H (33) 9 DC permeability Permeabilidad o Inductancia 8.000 7.000 6.000 5.000 4.000 3.000 2.000 1.000 0 0,00 0,50 1,00 1,50 Inducción [T] Figura 8. Variación de la permeabilidad y de la inductancia. Esta característica convierte a un reactor con núcleo ferromagnético en un elemento alineal, lo que por un lado complica su estudio y por otro produce consecuencias como la ya mencionada deformación de la corriente absorbida. En aquellos casos en que se necesita un reactor lo más lineal posible y uno sin núcleo resultaría demasiado voluminoso y costoso, se utiliza el recurso, por cierto muy empleado, de colocar un entrehierro en el circuito magnético. Un pequeño entrehierro intercalado, agrega una importante reluctancia serie en el circuito magnético, la que por ser constante, atenúa considerablemente las características alineales de la porción de hierro. Esta técnica también es utilizada para ajustar la inductancia del reactor al valor deseado, la que no es fácil de obtener exactamente, por las incertidumbres que existen en la etapa de diseño y durante la construcción del mismo. En algunas aplicaciones especiales, como ser en circuitos de filtrado, los reactores están sometidos a una corriente continua superpuesta a la corriente alterna, en estos casos se vuelve imprescindible la presencia del entrehierro para evitar la saturación del núcleo y en estos casos se define una permeabilidad incremental. 3.2 Pérdidas en el hierro Si un material ferromagnético es sometido a un flujo variable, se puede observar un calentamiento del mismo, lo que significa que se está disipando potencia en forma de calor, lo que se traduce en una pérdida de energía. Hay dos fenómenos que conducen a esta pérdida de energía: la histéresis magnética y las corrientes parásitas. 3.2.1 Pérdidas por histéresis El fenómeno de la histéresis se presenta en muchas situaciones, en general se podría decir que es la oposición que presentan los materiales a cambiar de estado o de condiciones. En el caso especial de los materiales magnéticos, es la resistencia que presentan a cambiar sus condiciones de magnetización, fenómeno caracterizado por el conocido ciclo de histéresis de estos materiales. 10 La energía para realizar una evolución magnética se puede obtener suponiendo una bobina de resistencia despreciable y en el aire. Si la resistencia es despreciable, la tensión inducida será igual a la tensión aplicada y toda la energía intercambiada con la fuente pasará al o vendrá del campo magnético. t2 dλ ⋅ i dt [J] dt t1 t2 W = ∫ e ⋅ i dt = ∫ t1 (34) λ2 W = ∫ i dλ [J] (35) λ1 la que está representa por el área sombreada entre la curva y el eje ordenadas en la figura 9. λ λ2 W λ1 i 0 Figura 9. Energía en joule. La energía anterior se puede expresar por unidad de volumen, también denominada “densidad de energía” w : t2 t2 B2 dB H l W = ∫ e ⋅ i dt = ∫ N S ⋅ dt = S l ∫ H dB [J] dt N t1 t1 B1 (36) donde S l es el volumen ocupado por el campo magnético, entonces: B2 w = ∫ H dB [J/m3] (37) B1 la que está representa por el área sombreada entre la curva y el eje ordenadas en la figura 10. Β Β2 w Β1 H 0 Figura 10. Energía en joule por metro cúbico. 11 Aplicando esta idea a un ciclo de histéresis en el plano B-H se puede determinar la energía por unidad de volumen que se necesita para recorrerlo una vez. Dividiendo el ciclo en cuatro partes se tiene, figura 11: H B dB W >0 Crece >0 >0 Absorbida >0 Decrece <0 <0 Devuelta <0 Decrece <0 >0 Absorbida <0 Crece >0 <0 Devuelta B 2 + H 0 1 B - 2 3 H 0 B 3 H 0 + 4 B H 0 1 4 - Figura 11. Energía al recorrer un ciclo de histéresis. 12 En la figura 11 se puede observar que la energía absorbida para ir desde el punto 1 al 2 es mayor que la devuelta al pasar del punto 2 al 3. La diferencia es energía transformada irreversiblemente en calor, y si se recorre el otro semiciclo 3 - 4 - 1, ocurre otro tanto. O sea que para recorrer un ciclo completo se necesita una energía, por unidad de volumen, representada por el área encerrada por el propio ciclo. Lamentablemente la forma del ciclo de histéresis no facilita el cálculo de su área, pero en 1892, el ingeniero alemán Charles Proteus Steinmetz (1865-1923), radicado el los Estados Unidos, publica en la AIEE un importante trabajo sobre magnetismo, donde propone una fórmula empírica, avalada por las numerosas experiencias que había realizado, para obtener la densidad de energía necesaria para recorrer un ciclo de histéresis: n w = k h Bmáx [J/m3] (38) Donde kh en un coeficiente que depende del material y el exponente n que afecta al valor máximo de la inducción, conocido como “exponente de Steinmetz”, varía entre 1,6 y 2, dependiendo del estado de saturación del material. Si se multiplicar la expresión (38) por la frecuencia f , en hertz, se obtiene la potencia disipada en watt, que en general interesa más: n Ph = k h f Bmáx [W/m3] (39) Una interesante particularidad de esta expresión es que es independiente de la forma de onda. Otras formas de expresar estas pérdidas es reemplazando en la expresión (39) la frecuencia o la inducción máxima obtenidas de la (17), lo que da: f = E 4 N S Fe Bmáx Ph = kh n −1 Bmáx ⋅ E [W/m3] 4 N S Fe Bmax = Ph = (40) (41) E 4 N S Fe f kh (4 N S Fe )n (42) En [W/m3] n −1 f (43) Estas expresiones (41) y (43) son prácticamente independientes de la forma de onda, ya que la única restricción impuesta en la expresión (17), es que haya simetría de media onda, cosa muy común en la práctica. En ellas: N: Número de espiras de la bobina. SFe: Sección del hierro. E : Valor medio de la tensión inducida en la bobina. Dado que estas pérdidas por histéresis son función del área encerrada por el ciclo de histéresis, para disminuirlas habrá que reducir dicha área; esto se logra adicionando silicio al acero del 13 núcleo. Los valores más altos utilizados comercialmente están cerca del 5% ya que con títulos mayores, el acero se endurece, se vuelve quebradizo y resulta muy difícil de mecanizar. 3.2.2 Pérdidas por corrientes parásitas Toda vez que un material conductor se mueve dentro de un campo magnético, cortando sus líneas de fuerza, o cuando un conductor es atravesado por un campo magnético variable en el tiempo, que es el caso del núcleo de un reactor; en ese conductor se desarrollan corrientes parásitas que provocan pérdidas por efecto Joule en el mismo. Este fenómeno se produce en todas las máquinas eléctricas con núcleos ferromagnéticos y fue estudiado por el físico francés León Foucault (1819-1868) por lo que a dichas corrientes también se las denomina en su honor: “corrientes de Foucault”. Si se tiene una barra prismática atravesada por un flujo creciente, dirigido hacia arriba, como se muestra en la figura 12, en su interior se producirán corrientes parásitas que se oponen al crecimiento del flujo, dando lugar a dichas pérdidas. φ (crece) Figura 12. Corrientes de Foucault. Para reducir estas corrientes, se procede a aumentar la resistencia del camino que ellas recorren, ya sea utilizando materiales ferromagnéticos más resistivos, como ciertas cerámicas, tales como las “Ferrites”, utilizadas en altas frecuencias, pero la solución más empleada desde frecuencias industriales hasta las audiofrecuencias es proceder a laminar el núcleo y aislar las chapas entre sí, como se muestra en la figura 13. φ (crece) Figura 13. Núcleo laminado. 14 El laminado del núcleo alarga los caminos que deben recorrer las corrientes y reduce su valor y consecuentemente las pérdidas. En el Apéndice I, se hace una deducción del valor de estas pérdidas, resultando: Pp = a2 E 2 [W/m3] 2 2 12 ρ N S Fe (44) Expresión que es independiente de la forma de onda y de la frecuencia, donde: E: a: ρ: N: SFe: Valor eficaz de la tensión inducida en la bobina. Espesor de la chapa. Resistividad el material del núcleo. Número de espiras de la bobina. Sección del núcleo. Para el caso de flujo armónico la expresión (44) resulta: Pp = π 2a2 2 2 2 f Bmáx = k p f 2 Bmáx [W/m3] 6ρ (45) Tanto en la expresión (44) como en la (45) se puede observar que estas pérdidas dependen del cuadrado del espesor de la chapa magnética. Desde este punto de vista convendría hacerlas del menor espesor posible; pero lamentablemente esto tiene sus inconvenientes: encarece la fabricación de la chapa, complica el armado del núcleo y por sobre todas esas cosas, se reduce la sección efectiva de acero; en efecto si las chapas son más delgadas, habrá mayor cantidad de ellas y también mayor cantidad de capas aislantes entre las mismas, que no son ferromagnéticas y no contribuyen a la circulación del flujo. Esto conduce a la definición de un “factor de apilado” que se estudiará más adelante. Por lo expresado en el párrafo anterior se deduce que la elección del espesor de las chapas es una solución de compromiso. En los reactores y transformadores de potencia que trabajan a frecuencia industrial, se utilizan chapas de 0,25 a 0,45 mm de espesor, este último valor para pequeños transformadores no muy exigidos. En las máquinas eléctricas rotativas el espesor de las chapas varía aproximadamente entre 0,4 a 1 mm, dependiendo de la frecuencia del flujo en esa parte del núcleo. Las chapas se comercializan recubiertas de un fosfatizado para evitar la oxidación de las mismas, lo que por sí dificulta la circulación de las corrientes parásitas, pero esto no es suficiente. Para garantizar la aislación entre las chapas, las mismas vienen cubiertas con una fina capa de barniz, que les confiere un característico color amarillo verdoso. Esta capa de barniz debe ser suficientemente fina para no desaprovechar mucho el espacio y suficientemente gruesa como para garantizar su resistencia mecánica y la uniformidad de su espesor; como las diferencias de potencial entre las chapas son fracciones de volt, el aspecto dieléctrico queda garantizado por las condiciones mecánicas. 3.2.3 Pérdidas totales en el hierro Las expresiones (39), (41), (43), (44) y (45) dan las pérdidas por unidad de volumen, o sea que para obtener el valor total de pérdidas que le corresponde a un núcleo, hay que multiplicarlas por el volumen del mismo. 15 PFe = ( Ph + Pp ) ⋅ VFe [W] (46) En esta expresión VFe es el volumen real del núcleo, es decir sin contar las separaciones aislantes entre chapas, para lo cual se debe tener en cuenta el, ya mencionado, factor de apilado, que está definido por la relación: k ap = Sección efectiva de hierro Volumen efectivo de hierro = ≤1 Sección aparente de hierro Volumen aparente de hierro (47) Este factor de apilado solamente será igual a la unidad en el caso de tratarse de un núcleo macizo. Valores típicos de factores de apilado se encuentran entre 0,85 y 0,95. Cuanto más delgadas son las chapas, tanto más bajo es el factor de apilado y también si las chapas se encuentran dobladas u oxidadas, baja este factor. Un bajo factor de apilado hará que la máquina resulte más voluminosa, lo que implica mayores costos y mayores pérdidas de energía. Por eso es importante el cuidado de las laminaciones y, como ya se dijo, la elección de su espesor es una solución de compromiso que debe ser estudiada detenidamente. La sección y el volumen efectivos del núcleo se determinan de la siguiente forma: S Fe = k ap ⋅ (Sección aparente ) [m2] (48) VFe = k ap ⋅ (Volumen aparente ) [m3] (49) Donde la “sección aparente” y el “volumen aparente” son las obtenidas a partir de las dimensiones del núcleo. De lo dicho resulta que el conocimiento del valor del factor de apilado con que se trabaja es un dato importante en el diseño de una máquina. Una vez construido el núcleo, o utilizando una muestra, se puede obtener dicho factor a partir de la masa GFe del mismo y de su densidad γFe , valor éste dado por el fabricante de la chapa magnética: k ap = GFe γ Fe Volumen aparente (50) En la expresión anterior se desprecia el peso del material aislante entre chapas que, de hecho posee una densidad y un volumen mucho menores que los del acero. En realidad, las ya citadas expresiones (39), (41), (43), (44) y (45) dan las dependencias funcionales de las pérdidas en el hierro, es decir de que dependen, y sirven para saber cómo reducirlas o analizar cómo van a variar. Llegado el momento de calcular las pérdidas que le corresponden a un dado núcleo, se debe recurrir a las curvas provistas por los fabricantes de las chapas magnéticas, estas curvas son los resultados de muchas mediciones realizadas, en condiciones normalizadas, sobre muestras de chapas de distintas aleaciones, espesores y a distintas frecuencias. Entre las curvas características que suelen ofrecer los fabricantes de chapas magnéticas se encuentran: las de magnetización con corriente continua y con corriente alterna, la variación de las pérdidas con la frecuencia, lazos de histéresis, permeabilidad en corriente continua e incremental, y otras para aplicaciones particulares. Con relación al tema en estudio, interesan las que dan la potencia total de pérdidas y los volt ampere de excitación, ambas en función del valor máximo de la inducción magnética, para chapas de una composición dada (grado), un dado 16 Inducción máxima [T] espesor (calibre) y una dada frecuencia, como se muestra en las figuras 14 y 15. A fin de generalizar su aplicación, en abscisas se representan, en escala logarítmica, las pérdidas totales específicas, es decir en watt por unidad de masa del núcleo. 1,80 1,60 1,40 1,20 1,00 0,80 0,60 0,40 0,20 0,00 0,01 0,10 1,00 10,00 Pérdidas [W/Kg] Inducción máxima [T] Figura 14. Pérdidas totales, específicas en el hierro. 1,80 1,60 1,40 1,20 1,00 0,80 0,60 0,40 0,20 0,00 0,1 1,0 10,0 100,0 1000,0 Volt ampere de excitación por Kg Figura 15. Volt ampere de excitación. Las curvas de las figuras 14 y 15, corresponden a una chapa, laminada en caliente, de 7,55 g/cm3, calibre 29, 0,356 mm de espesor, ensayada con un aparato de Epstein a 50 Hz. Se trata de una chapa de bajas pérdidas, menos de 1 W por Kg, a 50 Hz y 1 tesla, recomendada para pequeños transformadores y máquinas rotativas. En algunos casos en que no se dispone de estas curvas, por ejemplo cuando se compran pequeñas cantidades de laminaciones ya cortadas, seguramente el proveedor de las mismas puede 17 suministrar la denominada “cifra de pérdidas” (CP) de la chapa, que no es otra cosa que un punto de la curva de la figura 14, a una dada inducción máxima y una dada frecuencia; por ejemplo 1 ó 1,5 T y 50 ó 60 Hz. Esta cifra de pérdidas, que es un medio muy útil para comparar las características de las chapas magnéticas, oscila entre valores de 0,2 a 10 W/Kg a 50 Hz, 1 T y con espesores menores a 0,5 mm. Si las condiciones en las que se va a utilizar la chapa magnética no coinciden con aquellas para las que se da la cifra de pérdidas, que es lo más frecuente, las ecuaciones (39) y (45) seguramente no se podrán aplicar por desconocer que parte de la cifra de pérdidas corresponde a la histéresis y que parte a las corrientes parásitas. Por ese motivo se han desarrollado expresiones aproximadas como las de Richter: 2 CPB f ⎛B⎞ ⎛ f ⎞ ≅ ⎜ ⎟ ⎜ ⎟ ⋅ CP1 50 ⎝ 1 ⎠ ⎝ 50 ⎠ (51) u otra un poco más elaborada: 2 CPB f β ⎛B⎞ ⎛ f ⎞ ≅ ⎜ ⎟ ⎜ ⎟ ⋅ CP1 50 ⎝ 1 ⎠ ⎝ 50 ⎠ (52) donde: CP1 50 Cifra de pérdidas a 1 T y 50 Hz. CPB Cifra de pérdidas a B [T] y f [Hz]. β f 1,5 para chapas de bajo contenido de silicio y de 1,2 a 1,3 para chapas de alto contenido de silicio. 3.2.4 Chapas laminadas en frío y en caliente El proceso de fabricación y el posterior mecanizado de las chapas influye en sus propiedades magnéticas, en efecto, si las etapas finales del proceso de laminación se realiza con las chapas frías, lo que requiere más energía para la deformación de las mismas, su estructura cristalina queda dispuesta en una dirección preferencial, coincidente con el sentido de la laminación. Estas chapas se denominan de grano orientado o simplemente laminadas en frío y poseen alta permeabilidad y muy bajas pérdidas, siempre y cuando se las magnetice en la dirección del laminado. No en todas las máquinas eléctricas el flujo recorre a las laminaciones en una misma dirección, por ejemplo en las máquina rotativas esto ocurre excepcionalmente, pero en los transformadores y reactores, el flujo sigue la dirección de las columnas y de los yugos, por ese motivo se prestan a la utilización de este tipo de chapas, obteniéndose una considerable mejora en sus prestaciones. Para evitar que flujo magnético al pasar de una columna al yugo o viceversa, circule transversalmente a la laminación, estas uniones se realizan cortando las chapas a 45° lo que minimiza el problema y es un signo inequívoco de que se están utilizando chapas de grano orientado. Las bondades de las chapas laminadas en frío, se pierden rápidamente si son magnetizadas en direcciones que no coinciden con la de laminación; en la figura 16 se muestra la variación de las pérdidas totales a 1,5 T y 50 Hz de una chapa de grano orientado de 0,33 mm de espesor, cuando 18 Pérdidas totales [W/Kg] es magnetizada en distintas direcciones. Algo muy semejante ocurre con los volt ampere de excitación. 4,0 3,5 3,0 2,5 2,0 1,5 1,0 0,5 0,0 0 10 20 30 40 50 60 70 80 90 Grados Figura 16. Pérdidas en función del ángulo de magnetización. Por el contrario, si todo el laminado es realizado con las chapas en caliente, lo que facilita el proceso por la mayor plasticidad de las mismas, la estructura cristalina resulta desordenada, sin ninguna dirección preferencial y las chapas son prácticamente isótropas y se las denomina simplemente: chapas laminadas en caliente. Estas chapas son empleadas fundamentalmente en las máquinas rotativas, donde la dirección de magnetización es cambiante y también en pequeños transformadores y reactores, construidos con laminaciones realizadas con muy pocas partes, donde, además, sus prestaciones no son muy severas. A modo de comparación la chapa, laminada en caliente, cuyas características se dan en las figuras 14 y 15, a 1,5 T y 50 Hz, posee 2,32 W/Kg de pérdidas y necesita 90 VA/Kg de excitación; mientras que una de grano orientado, del mismo calibre, magnetizada en la dirección del laminado y en las mismas condiciones de inducción y frecuencia, posee 1 W/Kg de pérdidas e insume 1,37 VA/Kg de excitación. También los posteriores cortes, punzonados, e incluso dobleces involuntarios de las chapas, generan tensiones internas que desmejoran sus condiciones magnéticas y en las máquinas más exigidas, luego de mecanizadas, las chapas son sometidas, durante varias horas, a un proceso de recocido a temperaturas entre 700 y 800 C, estrictamente especificado por los fabricantes, que les restituye sus características originales. 3.2.5 Ciclo de histéresis dinámico El ciclo de histéresis analizado en la figura 11 es el denominado estático, es decir obtenido con corriente continua o con una corriente alterna de una frecuencia suficientemente baja, para que las corrientes parásitas inducidas en el núcleo sean despreciables. Si se traza un ciclo de histéresis con corriente alterna de algunos pocos hertz o a frecuencias industriales, las corrientes parásitas no serán despreciables y la fuerza magnetomotriz necesaria para establecer un determinado valor de flujo será la requerida por la histéresis más la necesaria para vencer la fuerza magnetomotriz generada por las corrientes parásitas. 19 En efecto las corrientes parásitas actúan como secundarios en cortocircuito, generando fuerzas magnetomotrices que se oponen a la variación del flujo, por lo tanto se necesitarán corrientes o campos magnéticos H mayores para vencer esas fuerzas magnetomotrices generadas por las corrientes de Foucault, y el ciclo de histéresis resulta más ancho, figura 17, y se denomina ciclo de histéresis dinámico. B H 0 Figura 17. Ciclo de histéresis dinámico. El área encerrada por el ciclo de histéresis dinámico en el plano B-H representa la suma de las pérdidas por histéresis y por corrientes parásitas de todo el núcleo y por unidad de volumen del mismo. 3.3 Circuito equivalente y diagrama fasorial El circuito equivalente de un reactor con núcleo ferromagnético debe tener en cuenta la potencia de pérdidas en el hierro, para ello se deberá agregar otro elemento disipativo, es decir otra resistencia. Un criterio puede ser agregar otra resistencia serie rp al circuito de la figura 2, tal que la potencia que en ella se disipa sea igual a las pérdidas totales en el núcleo. A la suma de las resistencias propia de la bobina y la de pérdidas se la suele llamar resistencia efectiva re . PFe = rp ⋅ I 2 re = r + rp Pero como las pérdidas en el núcleo no dependen tan directamente del cuadrado de la corriente que circula por la bobina, este criterio solamente es válido para una dada condición de funcionamiento, es decir para una dada tensión y una dada frecuencia; por ejemplo, con corriente continua no hay pérdidas en el hierro, pero el circuito daría un valor no nulo. Por lo dicho este criterio NO se utiliza en máquinas eléctricas. Es mucho mejor colocar una resistencia Rp en paralelo con la reactancia magnetizante Xm , en efecto en este caso la potencia que se disipa en esa resistencia depende del cuadrado de la fuerza electromotriz E , la que a su vez es función de la inducción B , como ocurre con las pérdidas del núcleo: PFe = E2 ∝ f 2B2 Rp (53) 20 Respecto a la dependencia con la frecuencia, también da una variación cuadrática, que se corresponde con las pérdidas por corrientes parásitas pero no con las de histéresis, pero, como afortunadamente, en la mayoría de las aplicaciones de potencia la frecuencia es constante, este desajuste no es tan importante. Por todo lo expuesto, el circuito equivalente de un reactor con núcleo ferromagnético resulta, figura 18: I r + U + Ip Rp Im E Xm Figura 18. Circuito equivalente de un reactor con núcleo. Donde: r: Rp: Xm: U: I: Ip: Im: Resistencia óhmica del bobinado. Resistencia de pérdidas. Reactancia magnetizante. Tensión aplicada. Corriente total. Corriente de pérdidas. Corriente magnetizante. Algunas veces la rama paralelo se define con parámetros admitancia que simplifican algunos cálculos: Gp = 1 Rp (54) Bm = 1 Xm (55) Las que se denominan “conductancia de pérdidas” y “susceptancia magnetizante” respectivamente. A este circuito equivalente le corresponde el siguiente diagrama fasorial, figura 19: 21 . rI . E . U ϕ ψ . . A B O . I .I . Ip . Φ m Figura 19. Diagrama fasorial de un reactor con núcleo. En este fasorial se puede observar que el ángulo de fase interno ψ , entre la fuerza electromotriz y la corriente, es menor a 90°, como lo era en el reactor en aire, esto conduce a otra distribución de la potencia activa, en efecto, haciendo un razonamiento como el hecho con el reactor sin núcleo, ecuaciones (29) a (32), resulta que la potencia activa absorbida vale: P = UI cosϕ (56) pero: U cos ϕ = O A + A B = E cosψ + rI y reemplazando resulta: donde: P = EI cosψ + rI 2 (57) EI cosψ = EI p = PFe (58) rI 2 = PCu (59) que son las potencias activas que se disipan en cada una de las resistencias del circuito equivalente de la figura 18. Las pérdidas en el hierro que aparecieron en esta simple deducción son consecuencia de que el ángulo ψ , en este caso, es menor de 90°. Respecto a la potencia reactiva, resulta: Q = UI sin ϕ pero: (60) U sin ϕ = E sinψ y reemplazando: Q = EI sinψ = EI p (61) que es la potencia reactiva en la única reactancia del circuito equivalente de la figura 18. Se deja al lector las comparaciones de estos resultados con los anteriormente obtenidos en el reactor sin núcleo. 22 Otras relaciones útiles que resultan del diagrama fasorial son: I p = I cosψ (62) I m = I sinψ (63) I = I p2 + I m2 (64) 3.4 Forma de onda de la corriente En un reactor en aire el flujo es proporcional a la corriente pero, cuando el reactor posee un núcleo ferromagnético la relación entre ambos está dada por el ciclo de histéresis, que no es lineal. Suponiendo una dada forma de onda para el flujo o para la corriente se puede obtener la forma de onda que resultará para la otra variable. A continuación se analiza el caso más frecuente que es el de suponer al flujo con una variación sinusoidal. En efecto, si la tensión aplicada u es sinusoidal, también lo será la fuerza electromotriz inducida e ya que la caída de tensión en la resistencia del bobinado es prácticamente despreciable. Para que la e sea sinusoidal, también deberá serlo el flujo, ya que su derivada conduce a la fuerza electromotriz, es decir si: Debe ser: u ≅ e = 2 E cos ω t (65) φ = Φ máx sin ω t (66) Partiendo de esta suposición del flujo variando sinusoidalmente, se puede obtener gráficamente la forma de onda de la corriente a partir del ciclo de histéresis, figura 20: i φ 3 3 n φ i φ m 3 n´ n 4 4 2 1 2 i 5 t 2 0 5 1 t 8 5 4 6 6 1=8 8 6 7 7 7 Figura 20. Forma de onda de la corriente. El procedimiento es el siguiente: a un instante cualquiera t, le corresponde el punto n, en la zona creciente de la onda de flujo y en el lado derecho del ciclo de histéresis. A ese punto n del ciclo de histéresis, le corresponde la corriente n´n. Trasladando este segmento al gráfico donde está la onda de flujo, se obtiene el punto m de la onda de corriente para ese instante t. Repitiendo este procedimiento para distintos punto se obtiene gráficamente la onda de corriente. 23 En el gráfico de la figura 20 se eligieron algunos puntos particulares, (numerados del 1 al 8), que muestran que los ceros de la corriente (puntos 1 y 4) adelantan a los del flujo (2 y 5), pero que los máximos de la corriente y del flujo (puntos 3 y 7) se producen en los mismos instantes . Por la forma no sinusoidal de onda de corriente, la misma resulta ser una poliarmónica y por la simetría del ciclo de histéresis, esa corriente resulta con simetría de media onda y por lo tanto contiene solamente armónicos impares, con un fuerte contenido del tercero. Valores típicos son los siguientes: Fundamental: Tercer armónico: Quinto armónico: Séptimo amónico: Noveno armónico: 100 % 35 % 11 % 5% 1% Estos valores deben tomarse como de orientación, ya que dependen fuertemente del estado de saturación de la chapa, además de las características misma. Esta corriente no sinusoidal plantea varios problemas formales relacionados con su representación fasorial y posterior utilización. La solución que se adopta es la de utilizar una corriente sinusoidal equivalente. El criterio de equivalencia se establece en base a que esta corriente equivalente posea igual valor eficaz y de lugar a las iguales potencias que la poliarmónica. El mismo valor eficaz asegura que las pérdidas en el cobre, que dependen de este valor eficaz, producidas por la corriente poliarmónica y por la equivalente, serán iguales. También los valores eficaces de las caídas de tensión producidas por esa corriente equivalente, serán iguales a los reales. Tanto la fase de esta corriente equivalente, como el ángulo ψ o la componente de pérdidas Ip del diagrama fasorial de la figura 19, deben ser tales que den lugar a las mismas pérdidas en el hierro que en el reactor real. Como se verá más adelante esta corriente equivalente surge en forma directa a partir de las mediciones que se realizan para determinar los parámetros del modelo circuital. Si se hace un análisis armónico de la corriente del reactor se pueden definir la corriente equivalente y sus componentes de pérdidas y magnetizante. Por la forma con que resulta la corriente poliarmónica y la referencia de tiempo adoptada para la fuerza electromotriz y el flujo, esa corriente no es par ni impar y el análisis de Fourier da componentes seno y coseno: i = 2 (I1′ sin ω t + I 3′ sin 3ω t + I 5′ sin 5ω t + ⋅ ⋅ ⋅ + I1′′sin ω t + I 3′′ sin 3ω t + I 5′′ sin 5ω t + ⋅ ⋅ ⋅) (67) El valor eficaz de la corriente equivalente será el valor eficaz de esta poliarmónica, es decir: I = I1′ + I1′′ + I 3′ + I 3′′ + I 5′ + I 5′′ + ⋅ ⋅ ⋅ 2 2 2 2 2 2 (68) Como ya se vio las pérdidas en el hierro (58) valen: PFe = EI p (69) 24 y como la fuerza electromotriz e posee solamente componente fundamental y además es una función coseno, la única componente de la corriente i que dará potencia activa con ella, es la componente I1′′ que tiene la misma frecuencia fundamental y está en fase con ella. Entonces: I p = I1′′ (70) Lo que resta de la corriente poliarmónica debe ser la componente magnetizante: 2 2 2 2 2 I m = I1′ + I 3′ + I 3′′ + I 5′ + I 5′′ + ⋅ ⋅ ⋅ (71) Las corrientes definidas según (68), (70) y (71) cumplen con la relación pitagórica (64): I = I p2 + I m2 (72) Del análisis anterior resulta que las corrientes total y magnetizante son poliarmónicas, mientras que la componente de pérdidas es sinusoidal, conviene recordar estas conclusiones porque con el uso corriente de los fasores equivalentes uno tiende a olvidar la realidad. En la mayoría de los casos esta corriente poliarmónica no produce efectos nocivos, pero hay excepciones en las que se debe tener en cuenta. 4 DETERMINACIÓN DE PARÁMETROS Los parámetros de los circuitos equivalentes deben poder obtenerse con facilidad ya que en el caso contrario, el modelo perdería practicidad. En el caso del reactor, como en la mayoría de los casos, los parámetros del modelo se pueden determinar a partir de mediciones de laboratorio o a partir de los datos de diseño. 4.1 Determinación a partir de ensayos Los tres parámetros del circuito equivalente, para frecuencias industriales, de un reactor con núcleo ferromagnético se determinan experimentalmente de la siguiente forma. La resistencia óhmica del bobinado se mide con corriente continua, preferentemente con un puente; como generalmente es un valor bastante bajo lo más indicado es un puente de Thomson. Como la resistencia del cobre varía considerablemente con la temperatura, es necesario medir la temperatura ambiente y asegurarse que el reactor se encuentre a es temperatura en el momento de la medición, para lo cual conviene que no haya estado conectado durante 4 ó 5 constantes de tiempo térmicas, lo que, dependiendo del tamaño del mismo, podrán ser de 2 a 5 horas. Si por razones de ajuste a alguna norma, debe especificarse la resistencia a una temperatura t se procede de la siguiente manera: la resistencia a la temperatura ambiente vale: ramb = r0 (1 + α 0 t amb ) (73) y a la temperatura t : rt = r0 (1 + α 0 t ) (74) donde α0 para el cobre vale 1/234,5 1/°C; lo que significa que una variación de aproximadamente 23,5 °C produce una variación del 10% en la resistencia, lo que es bastante considerable. Haciendo el cociente de las expresiones (74) y (73) se elimina r0: 25 1 rt ramb +t 1+ α0 t α0 234,5 + t = = = 1 1 + α 0 t amb 234,5 + t amb + t amb α0 Entonces: rt = 234,5 + t ramb 234,5 + t amb (75) Luego se hace un ensayo con corriente alterna senoidal donde se miden la frecuencia f, el valor eficaz de la corriente I´ , la potencia activa P´ y el valor eficaz de la tensión aplicada U. El circuito normalmente utilizado es el siguiente, figura 21: I´ A f P´ W U Hz V Iw Iv Figura 21. Circuito de ensayo. Algunas normas suelen pedir que se verifique el factor de forma de la tensión aplicada para garantizar el valor de las pérdidas en el hierro que se están midiendo, para lo cual recomiendan colocar dos voltímetros: uno de respuesta cuadrática, por ejemplo de hierro móvil, que responde al valor eficaz y otro de respuesta lineal, por ejemplo de bobina móvil con rectificador, que responde al valor medio; lo que permite obtener el factor de forma de la tensión como el cociente de las indicaciones de ambos voltímetros, Uef y Umed respectivamente: k f = 1,11 U ef (76) U med ya que ambos voltímetros están calibrados en valores eficaces correspondientes a una onda sinusoidal. Para que la medición sea válida este factor de forma no deberá diferir de los límites establecidos en la norma. En la actualidad existen analizadores electrónicos que dan esta información y otros datos de interés, respecto a las formas de onda, que evitan la necesidad de utilizar el voltímetro de valor medio. La corriente se mide con un amperímetro de hierro móvil que da el valor eficaz de la poliarmónica que toma el reactor, es decir la corriente eficaz equivalente que se ha definido más arriba. En realidad el amperímetro indica la corriente I´ suma fasorial de las corrientes absorbidas por el reactor I más la del voltímetro IV y la del circuito de tensión del wattímetro IW. En general la diferencia entre los módulos de las corrientes I´ e I es suficientemente pequeña como para no tenerla en cuenta, pero si se desea hacer la corrección, puede realizarse teniendo en cuenta el diagrama fasorial de la figura 22: 26 . U O ϕ .´ . I .I ϕ´ I vw Figura 22. Diagrama fasorial para corregir los errores sistemáticos. Sea: U& = U∠0 (77) U U I&VW = I&V + I&W = + = I VW ∠0 RV RW (78) cosϕ ′ = P′ → ϕ′ UI ′ (79) I&′ = I ′∠ − ϕ ′ (80) I& = I&′ − I&VW = I∠ − ϕ (81) Lo que sí es necesario corregir es la indicación del wattímetro: ⎛U 2 U 2 ⎞ ⎟⎟ + P = P′ − ⎜⎜ ⎝ RV RW ⎠ (82) Una vez corregidos los errores sistemáticos propios del método de medición se pueden calcular los parámetros del circuito equivalente, de la siguiente manera: cosϕ = P →ϕ UI I& = I∠ − ϕ y (83) U& = U∠0 (84) E& = U& − rI& (85) PFe = P − rI 2 (86) PFe E (87) Ip = 1 E E2 = = Rp = G p I p PFe (88) I m = I 2 − I p2 (89) 27 Xm = E 1 = Bm I m (90) De esta forma se pueden determinar experimentalmente los parámetros del circuito equivalente de un reactor con núcleo ferromagnético; si el reactor fuera en aire, habrá que suprimir todo lo relacionado con las pérdidas en el hierro y el cálculo es mucho más sencillo. Si se deseara separar las pérdidas en el hierro en sus componentes de histéresis y de corrientes parásitas, se debe repetir el ensayo anterior, pero a diferentes frecuencias, lo que en general no es muy sencillo por el equipo necesario. El procedimiento está basado en la distinta dependencia que tienen las pérdidas por histéresis y las pérdidas por corrientes parásitas, con la frecuencia. Si se varía solamente la frecuencia de la tensión aplicada, también variará la inducción en el núcleo, lo que modifica las pérdidas. Para evitar que también cambie la inducción, se debe variar proporcionalmente la tensión aplicada, en efecto como: U ≅ E = 4,44 f N S Fe Bmáx (91) si se deja constante la relación U/f la inducción máxima permanecerá constante: U ≅ 4,44 N S Fe Bmáx = cte. → Bmáx = cte. f (92) Si en estas condiciones de inducción constante, a las pérdidas en el hierro, dadas por las expresiones (39) (45) y (46) se las divide por la frecuencia, resulta la ecuación de una recta: ( n 2 PFe = VFe k h f Bmáx + k p f 2 Bmáx ) (93) si Bmáx = cte: PFe 2 n = VFe k h Bmáx + VFe k p Bmáx ⋅ f = A+ B⋅ f f (94) Si en estas condiciones se representa PFe/f en función de la frecuencia resultará una recta cuya ordenada al origen multiplicada por la frecuencia serán las pérdidas por histéresis a esa frecuencia; y por diferencia se obtienen las pérdidas por corrientes parásitas. Figura 23. Para reducir los errores aleatorios propios de las mediciones y de la extrapolación al origen, esta última suele realizarse aplicando el método de los cuadrados mínimos. PFe /f Pp /f1 Ph /f1 O f1 Figura 23. Separación de pérdidas. 28 f 4.2 Determinación a partir de datos constructivos En la etapa de diseño del reactor los parámetros del circuito equivalente deben calcularse a partir de los datos constructivos: dimensiones, número de espiras, características de los materiales, inducción magnética máxima, frecuencia, etcétera. 4.2a Determinación de r y de las pérdidas en el cobre Para determinar la resistencia en corriente continua del bobinado se utiliza la expresión: r=ρ l s (95) Si se utiliza la resistividad ρ a 20°C, la resistencia calculada resultará referida a esa temperatura, si se desea expresarla a otra temperatura se utilizara la relación (75). Si la bobina es cilíndrica, como se muestra en la figura 24. s S Cu D med Figura 24. Corte de la bobina. La longitud l del conductor se puede calcular a partir de la longitud de la espira media lmed: l = N lmed = π N Dmed (96) Aprovechando estas relaciones se puede deducir una importante expresión para las pérdidas en el cobre específicas: PCu = rI 2 = ρ π N Dmed s (s J )2 [W] (97) donde J es la densidad de corriente. PCu = π ρ J 2 Dmed s N [W] (98) el producto s N es la sección total de cobre: S Cu = s N (99) y el volumen de cobre será: VCu = π Dmed S Cu (100) PCu = ρ J 2 VCu [W] (101) entonces: 29 PCu = ρ J 2 [W/m3] (102) Expresiones que muestran que también las pérdidas en el cobre dependen del volumen de cobre, como eran las del hierro, y que el valor específico de las pérdidas en el cobre es un valor sensiblemente constante ya que la densidad de corriente varía entre límites relativamente pequeños. 4.2b Determinación de Rp y de las pérdidas en el hierro Éstas se determinan utilizando las curvas que dan los fabricantes de las chapas magnéticas, en particular la de pérdidas específicas en función del valor máximo de la inducción, figura 14. Como estas curvas dan las pérdidas en W/Kg , primero hay que calcular la masa del núcleo a partir de las dimensiones del mismo, el factor de apilado y la densidad γFe de las chapas, dada por el fabricante de las mismas. S Fe = k ap S aparente (103) VFe = S Fe l Fe (104) GFe = VFe γ Fe (105) Entrando a las curvas de la figura 14 con el valor máximo de la inducción se obtienen las pérdidas específicas, y con la masa del núcleo, las pérdidas en watt: PFe [ W] = GFe [Kg] ⋅ PFe [ W/Kg] (106) Con las pérdidas en el hierro y la fuerza electromotriz inducida se calculan la corriente y la resistencia de pérdidas: E = 4,44 f N S Fe Bmáx (107) Ip = PFe E (108) Rp = 1 E E2 = = G p I p PFe (109) 3.5.2c Determinación de Xm y de la potencia reactiva En este caso se utilizan las curvas que dan los volt ampere específicos de excitación en función de la inducción máxima, figura 15. Cuando se utilizan estas curvas hay que fijarse de que forma, el fabricante de la chapa magnética, ha definido la potencia aparente de excitación, en general utilizan la fuerza electromotriz E en lugar de la tensión U ya que de esa forma no interviene la caída de tensión en la resistencia de la bobina. Entrando a la curva con la inducción máxima se obtiene dicha potencia aparente en VA/Kg , luego: S[VA] = GFe [Kg] ⋅ S[VA/Kg] I= (110) S E (111) 30 I m = I 2 − I p2 Xm = (112) E 1 = Bm I m (113) 4 BIBLIOGRAFÍA EE Staff del MIT: “Circuitos Magnéticos y Transformadores” Editorial Reverté, 1943. Gourishankar Vembu: “Conversión de Energía Electromecánica”. Representaciones y Servicios de Ingeniería S.A. 1969. 31