04-188 (Clasificador genérico de objetos).indd
Anuncio
.indd")
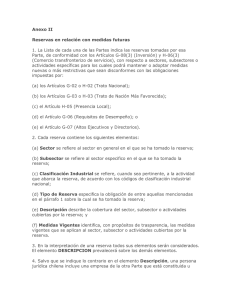
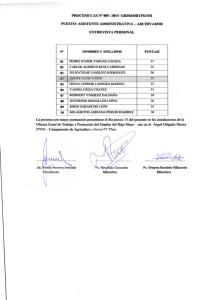
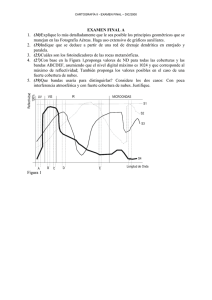
CLASIFICADOR GENÉRICO DE OBJETOS EN IMÁGENES ETM+ GENERIC OBJECT CLASIFICATOR ON ETM+ IMAGES Luis A. Palacios-Sánchez, Fernando Paz-Pellat, José L. Oropeza-Mota, Benjamín Figueroa-Sandoval, Mario Martínez-Menes, Carlos A. Ortiz-Solorio y Adolfo Exebio-García Hidrociencias. Campus Montecillo. Colegio de Postgraduados. 56230. Km. 36.5 Carretera MéxicoTexcoco, Montecillo, Estado de México. ([email protected]) RESUMEN ABSTRACT Se describe un algoritmo de clasificación genérico, basado en la forma de la firma espectral de 12 objetos presentes en las imágenes del sensor ETM+ del satélite Landsat 7. El algoritmo es un árbol de decisión que no requiere de campos de entrenamiento para llevar a cabo la clasificación, ya que se fundamenta en operaciones Booleanas que identifican los objetos por formas características de su firma espectral. El algoritmo ha sido utilizado con éxito en la estimación de superficies sembradas de cultivos e identificación de cuerpos de agua en imágenes que cubren casi la totalidad de la República Mexicana. An algorithm of generic classification is described based on the form of the spectral signature of 12 objects present on the images of the ETM+ sensor of Landsat 7 satellite. The algorithm is a decision tree that does not require training areas to carry out the classification, since it is backed up by Boolean operations, which identify the objects by the characteristic forms of their spectral signature. The algorithm has been successfully used in estimations of crop areas and in the identification of water bodies in images that cover almost all México. Key words: Decision trees, classification, remote sensors. Palabras clave: Árboles de decisión, clasificación, sensores remotos. INTRODUCTION E INTRODUCCIÓN very object on the earth’s surface constantly emits or reflects electromagnetic energy. The incident fraction of energy which reflects a surface coverage is called reflectance, which changes according to wavelength. The distribution of reflectance as function of the wavelength is called spectral signature; and varies also by the influence of other factors, such as atmospheric turbidity, temperature, biological activity, and geometry sun-sensor. The spectral signature is different for the distinct types of coverage and characterizes the objects on the earth’s surface; that is why it is possible to achieve –up to a certain degree– their discrimination. The analysis of images originating from remote sensors has the objective to obtain information about objects, areas, or phenomena on the earth’s surface. These sensors measure the intensity of the energy emitted or reflected by the objects over samples of the electromagnetic spectrum called spectral bands. There is a process of interpretation between this measurement and the characteristics whose identification is desired; this process depends on the objectives established. One of the most important applications of this type of analysis is generating thematic maps, where each pixel of the image is labeled by a classification rule, which specifies the type of object that exists in the reference zone of the labeled pixel (Cortijo et al., 1997). In natural resource studies, the identification of T odo objeto sobre la superficie terrestre emite o refleja constantemente energía electromagnética. La fracción de energía incidente que refleja una cobertura terrestre se denomina reflectividad, la cual cambia en función de la longitud de onda. La distribución de la reflectividad como función de la longitud de onda se denomina firma espectral; ésta varía también por la influencia de otros factores como la turbidez atmosférica, temperatura, actividad biológica y geometría sol-sensor. La firma espectral es diferente para los distintos tipos de cobertura y caracteriza a los objetos sobre la superficie terrestre, por lo que es posible lograr, hasta cierto punto, su discriminación. El análisis de imágenes provenientes de sensores remotos tiene como fin obtener información acerca de objetos, áreas o fenómenos sobre la superficie terrestre. Estos sensores miden la intensidad de la energía emitida o reflejada por los objetos sobre muestras del espectro electromagnético denominadas bandas espectrales. Hay un proceso de interpretación entre esta medición y las características que se desea identificar, este proceso depende de los objetivos establecidos. Recibido: Diciembre, 2004. Aprobado: Mayo, 2006. Publicado como ARTÍCULO en Agrociencia 40: 613-626. 2006. 613 AGROCIENCIA, SEPTIEMBRE-OCTUBRE 2006 Una de las aplicaciones más importantes de este tipo de análisis es la generación de mapas temáticos, en los cuales cada píxel de la imagen se etiqueta mediante una regla de clasificación, que especifica el tipo de objeto que hay en la zona que referencia el píxel etiquetado (Cortijo et al., 1997). Para estudios de recursos naturales, es importante la identificación de objetos que van desde cuerpos de agua, vegetación, suelo, nubes, hasta la identificación específica de tipos de suelos, y comunidades de vegetación. Existen dos tipos de clasificación temática: con supervisión y sin supervisión (Schowengerdt, 1997; Jensen, 2000). En la clasificación con supervisión, los píxeles se asignan a clases predefinidas que tienen puntos de control terrestre denominados campos de entrenamiento. En estos campos de entrenamiento el algoritmo estima las características espectrales de la clase que representa, para posteriormente tratar de asignar una clase a todos los píxeles de una imagen (Chulhee y Landgrebe, 1991; McCauley, 1995). En la clasificación sin supervisión no se utilizan campos de entrenamiento como base para la clasificación, y las clases se construyen a partir de las agrupaciones espectrales existentes en la imagen. La idea básica que subyace en estos métodos, llamados de agrupamiento, es que los píxeles de una clase deben tener valores espectrales similares, mientras que los de diferentes clases deberían tener valores diferentes y distinguibles. Adicionalmente existen métodos híbridos, que combinan características de ambos, como los de supervisión parcial, basados en ponderaciones de agrupaciones espectrales no supervisadas (Byeungwoo y Landgrebe, 1999). El objetivo de este trabajo fue presentar un sistema de clasificación con supervisión que identifica objetos predefinidos, con base en la forma de la respuesta espectral, de manera rápida, eficiente y sin necesidad de muestras de campo. La investigación se orientó a encontrar la forma más rápida y barata para identificar objetos genéricos, como vegetación, suelo desnudo, nubes y agua. Barata implicaba no realizar muestreos de campo, y rápida el procesamiento masivo de imágenes del satélite Landsat 7. El resultado es un algoritmo simple de identificación de patrones, pero que cumple con los objetivos. MATERIALES Y MÉTODOS Las firmas espectrales detectadas por los sensores remotos se pueden representar como vectores con n componentes, en los que cada componente es el valor resultante de aplicar una función de respuesta del sensor a una banda de muestreo del espectro electromagnético. 614 VOLUMEN 40, NÚMERO 5 objects, such as water bodies, vegetation, soil, clouds, and even the specific identification of soil or crops types vegetation communities, is important. There are two types of thematic classification: with and without supervision (Schowengerdt, 1997; Jensen, 2000). In the classification with supervision, the pixels are assigned to predefined classes having ground control points called training areas. In these training areas, the algorithm estimates the spectral characteristics of the class it represents, in order to subsequently try to assign a class to all the pixels of an image (Chulhee and Landgrebe, 1991; McCauley, 1995). In the classification without supervision, training areas are not used a base for classification, and the classes are constructed starting with the spectral clusters existing in the image. The basic idea underlying these methods, called clustering, is that the pixels of one class must have similar spectral values, whereas those of different classes should have different and distinguishable values. Additionally, there are hybrid methods, which combine the characteristics of both, like those of partial supervision, based on weighting of unsupervised spectral clustering (Byeungwoo and Landgrebe, 1999). The objective of this study was to present a classification system with supervision, which identifies predefined objects based on the form of spectral response, fast, efficiently, and without the need of field samples. The research was oriented to find the fastest and cheapest way of identifying generic objects, such as vegetation, bare soil, clouds, and water. Cheap implied not conducting field samplings, and fast, mass processing of Landsat 7 satellite images. The result is a simple algorithm of pattern identification, but which achieves the objectives. MATERIALS AND METHODS The spectral signatures detected by remote sensors can be represented as vectors with n components, where each component is the value resulting from applying a sensor response function to a sampling band of the electromagnetic spectrum. T X =⎡ ⎣ X1, X 2 ,..., X n ⎤ ⎦ , ∀ X i ∈ Θ i ; i = 1, 2,..., n (1) Xi is a random variable belonging to the set of values Θi that takes band i; these variables represent the pixels which form an image in matrix array. The typical values of this set for the Thematic Mapper (TM, n=7) and Enhanced Thematic Mapper (ETM+, n=8) sensors of the Landsat satellites are Θi={0, 1,…, 255}. The observation space might be defined by (Cortijo et al., 1997): n Φ = ⊗ Θi i=1 where ⊗ denotes the Cartesian product. (2) CLASIFICADOR GENÉRICO DE OBJETOS EN IMÁGENES ETM+ T X =⎡ ⎣ X1, X 2 ,..., X n ⎤ ⎦ , ∀ X i ∈ Θ i ; i = 1, 2,..., n (1) Xi es una variable aleatoria perteneciente al conjunto de valores Θi que toma la banda i; estas variables representan los píxeles que en arreglo matricial forman una imagen. Los valores típicos de este conjunto para los sensores Thematic Mapper (TM, n=7) y Enhanced Thematic Mapper (ETM+, n=8) de los satélites Landsat, son Θi={0, 1,…, 255}. El espacio de observaciones estaría definido por (Cortijo et al., 1997): n Φ = ⊗ Θi i=1 (2) donde ⊗ denota el producto cartesiano. Un sistema de clasificación tiene dos componentes críticas: un conjunto de clases (cultivo, suelo, agua, etc.) y un conjunto de reglas –o sistema– para la asignación de las clases. Sin un conjunto claro y definido de reglas, la asignación de las clases a los diferentes tipos de características es arbitraria e inconsistente. Adicionalmente, un sistema de clasificación debe satisfacer las restricciones de ser mutuamente excluyente y exhaustivo. Un sistema es mutuamente excluyente si cualquier punto en la imagen cae en una y sólo una categoría definida (clase), y totalmente exhaustivo si a todos los píxeles de una imagen les corresponde una clase. Para un sistema de clasificación se debe definir un conjunto de clases Ω = {ω1, ω2 ,...ωk −1, ωk }, donde en la clase ωk estarían todas las observaciones que no se puedan asignar con certeza a las otras k−1 clases. Un clasificador o sistema de clasificación se define por la función: f : Φ → Ω, ∀X , f ( X ) ∈ Ω (3) Para que cumpla con las restricciones planteadas, el clasificador debe ser una partición de Φ en k subconjuntos disjuntos R1, R2,…, R k: A classification system has two critical components: a set of classes (crop, soil, water, etc.) and a set of rules –or system– for the assignment to the classes. Without a clear and well-defined set of rules, the assignment of classes to the different types of characteristics is arbitrary and inconsistent. In addition, a classification system must satisfy the restrictions of being mutually exclusive and exhaustive. A system is mutually exclusive if any point in the image falls in one, and only one, definite category (class), and fully exhaustive, if all the image pixels receive a class label. For a classification system, a set of classes Ω = {ω1, ω2 ,...ωk −1, ωk }, must be defined, where in class ωk would be all the observations that cannot be assigned with certainty to the other k−1 classes. A classifier, or classification system, is defined by the function: f : Φ → Ω, ∀X , f ( X ) ∈ Ω (3) In order to fulfill the proposed restrictions the classifier must be a partition of Φ in k disjointed subsets R1, R2,…, Rk: Φ = {∪i Ri Ri ∩ R j = ∅∀ i ≠ j} ∀X ∈ Ri ⇒ f ( X ) = ωi (4) where i varies from 1 to k. The Ri’s are called decision regions, and the borders between them, decision borders. The decision trees are within the classification methods with supervision, whose final objective is to build a decision rule, based on learning sets (Breiman et al., 1984). In this paper, the assignment of a class to a X vector was carried out through the evaluation of a series of logical conditions on the values or transformations of the Xi variables. These conditions form a binary tree, which recursively generates partitions of the observation space, until reaching the terminal nodes, called leaves, composed by the Ri regions. Definition of classes Φ = {∪i Ri Ri ∩ R j = ∅∀ i ≠ j} ∀X ∈ Ri ⇒ f ( X ) = ωi (4) donde i varía desde 1 hasta k. A las Ri se les denomina regiones de decisión, y a las fronteras entre éstas fronteras de decisión. Los árboles de decisión se encuentran dentro de los métodos de clasificación con supervisión, cuyo objetivo final es construir una regla de decisión con base en un conjunto de aprendizaje (Breiman et al., 1984). En este trabajo la asignación de una clase a un vector X se realizó mediante la evaluación de una serie de condiciones lógicas sobre los valores o transformaciones de las variables Xi. Estas condiciones forman un árbol binario que recursivamente genera particiones del espacio de observaciones, hasta alcanzar los nodos terminales denominados hojas, los cuales están compuestas por las regiones Ri. To formulate the classification system, the classes making up the Ω set are defined. In the present study, 13 thematic classes were established, shown in Table 1. The selection of classes was made considering that they might be utilized as masks in algorithms of atmospheric correction, for algorithms of crop classification, and identification of forests, water bodies, etc. The advantage is that in the end one counts on a set of 13 classes, starting from a group whose dimension is defined in Equation (2); which makes it possible to carry out histograms and pixel counts for the assess of areas. Definition of observation space The observation space is made up of the first 7 bands of the ETM+ sensor, located on Landsat 7 satellite, but the algorithm PALACIOS-SÁNCHEZ et al. 615 AGROCIENCIA, SEPTIEMBRE-OCTUBRE 2006 Definición de clases Para formular el sistema de clasificación se definen las clases que componen el conjunto Ω. En el presente trabajo se establecieron 13 clases temáticas, que se muestran en el Cuadro 1. La selección de las clases se realizó considerando que podrían ser utilizadas como máscaras en algoritmos de corrección atmosférica, para algoritmos de clasificación de cultivos e identificación de bosques, cuerpos de agua, etc. La ventaja es que al final se cuenta con un conjunto de 13 clases a partir de un conjunto cuya dimensión está definida en la ecuación (2); con las que es posible realizar histogramas y conteos de píxeles para la estimación de superficies. Definición del espacio de observaciones El espacio de observaciones está formado por las primeras 7 bandas del sensor ETM+ ubicado en el satélite Landsat 7, pero el algoritmo es aplicable a las 7 bandas equivalentes del sensor TM del satélite Landsat 5 o a cualquier sensor que cuente con bandas de muestreo similares. Las características de las bandas del sensor ETM+ se muestran en el Cuadro 2. Es un requisito que los valores digitales se conviertan a reflectividad medidas en superficie, por lo que es necesario que se les aplique un proceso de corrección atmosférica. Algunas clases pueden is applicable to the 7 bands equivalent to the TM sensor of Landsat 5 satellite or to any sensor that counts on bands of similar samplings. The characteristics of the ETM+ sensor are shown in Table 2. It is a requirement that the digital values shall be converted into reflectance measured on the surface, for which it is necessary that a process of atmospheric correction should be applied. Some classes may be identified without the atmospheric correction process, like dark vegetation and that of high coverage, water, snow, mist, and clouds, that is why it can be utilized recursively firstly, for calculating input variables in the atmospheric correction algorithm, and subsequently, running it again with the bands transformed by the corrector. Band 6 must be transformed to the same spatial resolution as the others and convert to thermal brightness (BT), in Kelvin degrees, by means of the procedure explained in the Landsat 7 Users’ Scientific Manual (NASA, 2001). Definition of the classification function The classification function is based on the identification of characteristics of the form of the spectral signature for each class, therefore it is essential to analyze their form and variations for each class. Cuadro 1. Clases temáticas propuestas. Table 1. Proposed thematic classes. Número Nombre 0 1 2 3 4 5 6 7 8 9 10 11 12 Observaciones Sin datos Sombra Nube Bruma Hielo Agua Asfalto/arena oscura Suelo Veg. Cob. Baja Veg. Cob. Media Veg. Cob. Alta Veg. Oscura Otros Las partes de la imagen que no tienen información Sombras proyectadas por nubes y relieve topográfico Nubes densas Calina, neblina y nubes poco densas Glaciares y nieve Cuerpos de agua Poblaciones y suelos arenosos oscuros Suelo desnudo y vegetación senescente o muerta Vegetación con baja cobertura del suelo Vegetación con mediana cobertura del suelo Vegetación con alta cobertura del suelo Vegetación oscura (bosques, pantanos) Todo valor que no corresponde a las anteriores Cuadro 2. Características de las bandas del sensor ETM+. Table 2. Characteristics of ETM+ sensor bands. Rango espectral (micrómetros) Banda 1 2 3 4 5 6 7 8 (Azul, ρ1) (Verde, ρ2) (Rojo, ρ3) (IRC, ρ4) (IRM1, ρ5) (IRT, BT) (IRM2, ρ7) (Pancromática) 0.450 0.525 0.630 0.780 1.550 10.400 2.090 0.520 - 0.515 - 0.605 - 0.690 - 0.900 - 1.750 - 12.500 - 2.350 - 0.900 Centro de banda (micrómetros) 0.48 0.57 0.66 0.84 1.65 11.45 2.22 0.71 Resolución espacial (m) 30 30 30 30 30 60 30 15 IRC=Infrarrojo Cercano; IRM=Infrarrojo Medio; IRT=Infrarrojo Térmico, BT=Brillantez Térmica IRC=Near Infrared; IRM=Medium Infrared; IRT=Thermal Infrared; BT=Thermal Brightness. 616 VOLUMEN 40, NÚMERO 5 CLASIFICADOR GENÉRICO DE OBJETOS EN IMÁGENES ETM+ identificarse sin el proceso de corrección atmosférica, como la vegetación oscura y de alta cobertura, agua, nieve, bruma y nubes; por lo que se puede utilizar de manera recursiva para, primero, calcular las variables de entrada en el algoritmo de corrección atmosférico y posteriormente correrlo de nuevo con las bandas transformadas por el corrector. La banda 6 debe transformarse a la misma resolución espacial que las otras y convertirse a brillantez térmica (BT), en grados Kelvin, mediante el procedimiento explicado en el Manual Científico de Usuarios de Landsat 7 (NASA, 2001). Definición de la función de clasificación La función de clasificación tiene como base la identificación de características de la forma de la firma espectral para cada clase, por lo que es esencial analizar la forma y variaciones de las firmas espectrales para cada clase. Suelos En la Figura 1 se muestran las firmas espectrales de los cinco tipos de suelos de acuerdo con la clasificación por patrones espectrales (Stoner y Baumgartner, 1981). Estos autores clasificaron espectralmente a los suelos, en función de sus patrones típicos, en cinco clases: 1) suelos de textura moderadamente fina y dominados por materia orgánica; 2) suelos de textura moderadamente gruesa y afectados por materia orgánica; 3) suelos lateríticos, dominados por hierro; 4) suelos ricos en hierro; y, 5) suelos ricos en materia orgánica. El rasgo característico de los tres primeros tipos es un incremento en la reflectividad de las bandas visibles al infrarrojo medio 1 (IRM1) y que el infrarrojo medio 2 (IRM2) es menor al IRM1. Para suelos ricos en hierro y materia orgánica (4 y 5), los rasgos mencionados son poco marcados o inexistentes, aunque presentan el patrón típico de que las bandas visibles tienen incrementos en reflectividad (azul<verde<rojo), y las bandas del infrarrojo son muy similares entre sí. El patrón espectral más característico de un suelo es un incremento en la reflectividad de las bandas visibles. Para los tipos de suelos 1 a 3, este patrón incremental se presenta hasta el IRM1. En la Figura 2 se muestra el efecto del contenido de agua en el suelo en los patrones espectrales para los tipos de suelo 1 a 3. Algo similar sucede para los patrones de los tipos de suelo 4 y 5. En general, el incremento en el contenido de agua del suelo no cambia los patrones espectrales de éstos, sólo el valor de la reflectividad (Lobell y Asner, 2002). Soils Figure 1 shows the spectral signatures of the five soil types according to the classification by spectral patterns (Stoner and Baumgartner, 1981). These authors classified the soils spectrally, according to their typical patterns, into five classes: 1) soils of moderately fine texture, dominated by organic matter; 2) soils of moderately thick texture, affected by organic matter; 3) lateritic soils, dominated by iron; 4) soils rich in iron; 5) soils rich in organic matter. The characteristic trait of the three first types is an increment in the reflectance in the visible bands at medium infrared 1 (IRM1) and that medium infrared 2 (IRM2) is lower than IRM1. For soils rich in iron and organic matter (4 and 5), the mentioned traits are little marked or nonexistent, though they have the typical pattern of the visible bands, showing increase in reflectance (blue<green<red), and the bands of infrared are very similar among them. The most characteristic spectral pattern of a soil is an increment in the reflectance of the visible bands. For soil types 1 to 3, this incremental pattern is presented up to the IRM1. In Figure 2, the effect of water content in the soil is shown in the spectral patterns for soil types 1 to 3. Something similar occurs for the patterns of soil types 4 and 5. In general, the increment in soil water content does not change their spectral patterns, only the value of reflectance (Lobell and Asner, 2002). Vegetation Live vegetation can be subdivided in subclasses to better discern natural vegetation and crops, especially the one associated to low coverage and deciduous leaves. The reflectance simulation model of two-layer canopies, MCRM2 (Kuusk, 2001), was used to simulate the spectral behavior of different crops, utilizing type 3 soils as background (the result is similar for the other soils). Figure 3 shows the result obtained for alfalfa (Medicago sativa), rice (Oryza sativa), maize (Zea mays), and potato (Solanum tuberosum) for different Vegetación La vegetación viva puede subdividirse en subclases para discriminar mejor la vegetación natural y cultivos, especialmente la asociada a baja cobertura y hojas caducifolias. Se utilizó el modelo de simulación de reflectividad de doseles de 2 capas MCRM2 (Kuusk, 2001), para simular el comportamiento espectral de diferentes cultivos utilizando como fondo suelos del tipo 3 (el resultado es similar Figura 1. Firmas espectrales típicas de cinco clases de suelo. (Adaptado de Stoner y Baumgartner 1981). Figure 1. Typical spectral signatures of five soil classes (Adapted from Stoner and Baumgartner, 1981). PALACIOS-SÁNCHEZ et al. 617 AGROCIENCIA, SEPTIEMBRE-OCTUBRE 2006 Figura 2. Efecto de la humedad en la reflectividad del suelo. Figure 2. Moisture effect on soil reflectance. para los otros suelos). La Figura 3 muestra el resultado para alfalfa (Medicago sativa), arroz (Oryza sativa), maíz (Zea mays) y papa (Solanum tuberosum), para diferentes índices de área foliar y por consiguiente del porcentaje de cobertura del suelo. Del análisis de la Figura 3 se detectan varios patrones básicos en el desarrollo de un cultivo. El primer patrón que se puede observar, es que la reflectividad de la banda verde es mayor que las de las bandas azul y roja. El segundo patrón observado es que el valor máximo de reflectividad en los suelos desnudos y con cobertura vegetal baja corresponde a la banda IRM1, mientras que en suelos con cobertura vegetal media a alta, el máximo corresponde a la banda del infrarrojo cercano (IRC); el valor de reflectividad en esta última banda, se incrementa en función de la cobertura vegetal hasta alcanzar un valor de saturación. El tercer patrón se observa en el comportamiento de la reflectividad de las bandas infrarrojas conforme aumenta la cobertura vegetal. Para coberturas vegetales del suelo bajas a medias, las líneas que unen los valores de reflectividad IRC, IRM1 e IRM2, presentan una concavidad hacia arriba, mientras que para coberturas altas, la concavidad es hacia abajo. En el caso de la vegetación de alta cobertura oscura, típica de bosques sombreados o pantanos con suelos de alto contenido de humedad, la reflectividad en la banda azul no supera el 10%, la del IRM1 el 15% y la IRC el 30%. Agua La Figura 4 muestra dos patrones espectrales típicos de cuerpos de agua, uno con agua clara y profunda y otro con gran contenido de sólidos en suspensión. Se ha observado que el agua de mar tiene una reflectividad menor a la de los cuerpos de agua terrestres (bajo condiciones similares). Un patrón caraterístico de los cuerpos de agua clara (producto de la absorción de la radiación recibida), es la poca o nula reflectividad en el infrarrojo, especialmente en el infrarrojo medio (Jensen, 2000). Este rasgo diferencia a los cuerpos de agua de los suelos y la vegetación, de acuerdo a los patrones discutidos anteriormente. Los patrones espectrales básicos de los cuerpos de agua 618 VOLUMEN 40, NÚMERO 5 leaf area index and, consequently, for the percentage of ground coverage. From the analysis of Figure 3, several basic patterns in the development of a crop are detected. The first pattern that can be observed is that the reflectance of the green band is higher than in the blue and red bands. The second observed pattern is that the maximum value of reflectance on bare soils and with low vegetal coverage corresponds to band IRM1, whereas in soils with medium to high vegetal coverage, the maximum corresponds to the band of near infrared (IRC): the value of reflectance in this last band increases according to the vegetal coverage until reaching a saturation value. The third pattern is observed in the reflectance behavior of the infrared bands, as vegetal coverage increases. For low and medium vegetal soil covers, the lines that join the reflectance values IRC, IRM1, and IRM2, have an upward concavity, while for high coverage, the concavity is downward. In the case of vegetation of dark high coverage, typical for shady forests or marsh with soils of high moisture content, the reflectance in the blue band does not surpass 10%, in IRM1 15%, and in IRC 30%. Water Figure 4 shows two typical spectral patterns of water bodies, one with clear and deep water, and another with high content of solids in suspension. It has been observed that sea water has less reflectance than that of terrestrial water bodies (under similar conditions). A characteristic pattern of clear water bodies (product of the absorption of received radiation) is the scarce or zero reflectance in infrared, especially in medium infrared (Jensen, 2000). This trait differentiates the water bodies from soils and vegetation, according to the previously discussed patterns. The basic spectral patterns of the water bodies are the almost general situation of Blue<Green reflectance and the decreasing pattern in the reflectance of infrareds (including generally also green and red). The reflectance of a water body depends on the size of the water column (depth) and on the substrate of the bed. Shadows The spectral signature of shadows is very similar to that of water and, under certain conditions, it is impossible to differentiate them. The objects that cast shadows are mainly clouds and topographic elevations. Clouds have different density levels, that go from very light –such as cirrus– up to dense –like cumulonimbus– reasons for which a threshold must be specified, from which an object is considered to have the shadow of a cloud. Figure 5 presents the spectrum of two shadows of dense clouds on vegetation and soils. It can be appreciated that what corresponds to the shadow cast on vegetation, has a maximum in IRC, which agrees with the reflectance of the diffuse light in this band. The shadow projected on the soil has a spectral signature that does not differ from the one shown in Figure 4 for clear water without sediments. CLASIFICADOR GENÉRICO DE OBJETOS EN IMÁGENES ETM+ Figura 3. Firmas espectrales de cultivos en diferentes etapas de desarrollo. Figure 3. Spectral signature of crops at different stages of development. son la situación, casi general, de que la reflectividad Azul<Verde y el patrón decreciente en la reflectividad de los infrarrojos (incluyendo también generalmente al verde y rojo). La reflectividad de un cuerpo de agua es dependiente del espesor de la columna de agua (profundidad) y del substrato del lecho. Sombras La firma espectral de las sombras es muy similar a la del agua y, bajo ciertas condiciones, es imposible diferenciarlas. Los objetos que proyectan sombras son principalmente nubes y elevaciones topográficas. Las nubes tienen diferentes niveles de densidad, que van de muy ligeras, como los cirrus, hasta muy densas como los cumulo nimbus, por lo que se debe especificar un umbral a partir del cual se considera que un objeto tiene sombra de nube. En la Figura 5 se presenta el espectro de dos sombras de nubes densas sobre vegetación y suelos. Se puede apreciar que la Clouds, ice, and mist Clouds and ice have high reflectance in the visible bands that causes their white color, while mist has a translucent grayish aspect, which makes it possible to see the subjacent object. These three objects have the characteristic that their thermal brightness is very low, compared to the rest of the objects; therefore, the IRT band transformed to BT is utilized for their identification. The spectral signature of clouds and ice must adjust to the saturation of the bands in the ETM+ sensor (and TM), that is why it is convenient to analyze directly the signature of Landsat images. In Figure 6, the spectral signature of clouds, mist, and ice is shown as well as a spectrum that shows the theoretical sensor saturation for the date when the image was taken. On the image it is observed that in the case of snow, IRM1 and IRM2 bands have little reflectance, a situation associated to water in liquid state. The saturation values of the ETM+ sensor generate PALACIOS-SÁNCHEZ et al. 619 AGROCIENCIA, SEPTIEMBRE-OCTUBRE 2006 Figura 4. Firma espectral del agua. Figure 4. Spectral signature of water. correspondiente a la sombra proyectada sobre vegetación, tiene un máximo en el IRC, que corresponde a la reflectividad de la luz difusa en esta banda. La sombra proyectada sobre el suelo tiene una firma espectral que no difiere de la mostrada en la Figura 4 para agua clara sin sedimentos. Nubes, hielo y bruma Las nubes y el hielo tienen una alta reflectividad en las bandas visibles, a lo que se debe su color blanco, mientras que la bruma presenta un aspecto grisáceo translúcido, en el que es posible ver el objeto subyacente. Estos tres objetos tienen la característica de que su brillantez térmica es muy baja comparada con los demás objetos, por lo que se aprovecha la banda IRT transformada a BT para su identificación. La firma espectral de las nubes y el hielo deben ajustarse a la saturación de las bandas en el sensor ETM+ (y TM), por lo que en este caso es conveniente analizar directamente las firmas de imágenes Landsat. En la Figura 6 se presenta la firma espectral de las nubes, bruma y hielo, así como un espectro que muestra la saturación teórica del sensor para la fecha en que se tomó la imagen. En la imagen se observa que en el caso de la nieve las bandas IRM1 e IRM2 presentan poca reflectividad, situación que se asocia con el agua en estado líquido. Los valores de saturación del sensor ETM+ generan una firma espectral muy similar a la de la vegetación vigorosa, pero con valores muy altos de reflectividad. Figura 5. Firma espectral de las sombras proyectadas sobre vegetación y suelo. Figure 5. Spectral signature of shadows cast on vegetation and soil. a spectral signature, very similar to that of vigorous vegetation, but with very high values of reflectance. Asphalt and dark sand Asphalt and dark sand have similar reflectance values, for which it is difficult to attain an adequate and generalizable separation for any image. It is possible as well to get confused with certain types of soil, but one can also achieve their separation due to the fact that the reflectance values are similar for all the bands, that is, there is little contrast, therefore, they look gray. Figure 7 shows the spectral signature of these two objects. Classification of algorithm Based on the form of the spectral signatures of the presented objects, a classification algorithm was formulated, which is detailed subsequently. First, a series of auxiliary variables were defined, generated from the reflectance values ((ρλ, λ=1, 2, 3, 4, 5, and 7) and the thermal brightness BT, which are presented next: Asfalto y arena oscura El asfalto y la arena oscura tienen valores similares de reflectividad, por lo que es difícil lograr una separación adecuada y generalizable a cualquier imagen. También es posible confundirlas con determinados tipos de suelo, pero es posible lograr su separación debido a que los valores de reflectividad son similares para todas las bandas, esto es, existe poco contraste, por lo que se ven de color gris. En la Figura 7 se presentan las firmas espectrales de estos dos objetos. 620 VOLUMEN 40, NÚMERO 5 Figura 6. Firmas espectrales de nubes, hielo y bruma. Figure 6. Spectral signatures of clouds, ice and mist. CLASIFICADOR GENÉRICO DE OBJETOS EN IMÁGENES ETM+ Algoritmo de clasificación Con base en la forma de las firmas espectrales de los objetos mostrados se formuló un algoritmo de clasificación, el cual se detalla a continuación. Primero se definieron una serie de variables auxiliares generadas a partir de los valores de reflectividad (ρλ, λ=1, 2, 3, 4, 5 y 7) y la brillantez térmica BT, las cuales se presentan a continuación: is= ((3 * ρ1 ) − ρ4 − ρ5 − ρ7 ) ((3 * ρ1 ) + ρ4 + ρ5 + ρ7 ) ρ1 + ρ3 2 (6) ( ρ4 − ρ3 ) ( ρ4 + ρ3 ) (7) Brillo= ndvi= ig= (5) ( ρ 4 + ρ5 + ρ 7 ) ( ρ1 + ρ2 + ρ3 ) (8) La variable is permite identificar cuerpos de agua y sombras; un valor alto indica que existe un mayor contraste entre la reflectividad de la banda azul y la reflectividad de las bandas infrarrojas, tal como se observa en las Figuras 4 y 5. La variable brillo es el promedio de reflectividad de las bandas azul y roja, las cuales corresponden a las bandas de absorción por actividad fotosintética; esta variable ayuda a la discriminación de los objetos en función de su brillantez. El ndvi (normalized difference vegetation index), es el índice de vegetación de la diferencia normalizada y representa una relación entre la reflectividad de la banda roja y la banda infrarroja cercana; permite la identificación de vegetación y su grado de cobertura del suelo. La variable ig, es la relación entre la reflectividad de las bandas de la porción infrarroja y la reflectividad de la porción visible del espectro electromagnético, y auxilia en la identificación de objetos con poco contraste entre las bandas visibles e infrarrojas, como el asfalto y algunas sombras y bruma. Con base en estas variables y los valores de reflectividad, se generaron condiciones lógicas a partir de la forma de las firmas espectrales, las cuales usan alguna característica de estas firmas para formar una partición del espacio de observaciones. En la Figura 8 se presentan las condiciones lógicas, donde el símbolo ∩ corresponde al Y lógico y el símbolo ∪ al O lógico. UT es un umbral térmico (temperatura en °K) que permite identificar las nubes, hielo y bruma, en función de las condiciones climáticas de la imagen. En la Figura 9 se presenta el algoritmo de clasificación genérica de objetos, donde se utilizan las variables y condiciones previamente definidas, así como umbrales de reflectividad y brillantez térmica. Se codificó un programa en lenguaje C++ para realizar la clasificación genérica. El programa lee inicialmente el umbral térmico y las matrices de reflectividad de las siete bandas. Después Figura 7. Firma espectral del asfalto y arenas oscuras. Figure 7. Spectral signature of asphalt and dark sands. is= ((3 * ρ1 ) − ρ4 − ρ5 − ρ7 ) ((3 * ρ1 ) + ρ4 + ρ5 + ρ7 ) Brightness= ndvi= ig= ρ1 + ρ3 2 ( ρ4 − ρ3 ) ( ρ4 + ρ3 ) ( ρ 4 + ρ5 + ρ 7 ) ( ρ1 + ρ2 + ρ3 ) (5) (6) (7) (8) The variable is contributes to identify water bodies and shadows; a high value indicates that there is a higher contrast between reflectance of the blue band and the reflectance of infrared bands, as observed in Figures 4 and 5. The variable brightness is the average of reflectance of the blue and red bands, which correspond to the bands of absorption by photosynthetic activity; this variable helps to discern the objects according to their brightness. The ndvi is the normalized difference vegetation index and represents a relationship between the reflectance of the red and the near infrared band; it helps in the identification of vegetation and its degree of soil coverage. The variable ig is the relationship between the reflectance of the bands of infrared portion and the reflectance of the visible portion of the electromagnetic spectrum, and it helps to identify objects with little contrast between visible and infrared bands, like asphalt and some shadows and mist. Based on these variables and the reflectance values, logical conditions were generated from the form of spectral signatures, using a characteristic of these to form a partition of the observation space. In Figure 8 the logical conditions are shown, where the symbol ∩ corresponds to the logical Y and the symbol ∪ to the logical O. UT is a thermal threshold (temperature in °K), that allows to identify the clouds, ice, and mist, according to the climatic conditions of the image. Figure 9 shows the algorithm of generic object classification, where variables and previously defined conditions are utilized as well as thresholds of reflectance and thermal brightness. PALACIOS-SÁNCHEZ et al. 621 AGROCIENCIA, SEPTIEMBRE-OCTUBRE 2006 calcula las variables auxiliares y las condiciones lógicas para cada píxel. Finalmente, clasifica la escena con base en el algoritmo de la Figura 9 y el resultado se guarda en una matriz con los valores numéricos del Cuadro 1, que corresponden a cada objeto genérico identificado. RESULTADOS Y DISCUSIÓN Debido a que las operaciones del algoritmo son de carácter Booleano, su ejecución es bastante rápida, tarda alrededor de 4 minutos en analizar una escena completa del sensor ETM+ (PC Intel Pentium III, 750 MHz). En comparación, un algoritmo de clasificación temática como el de máxima verosimilitud o el análisis de agrupamientos, puede tardar un par de horas en procesar una escena completa. En la Figura 10 se presenta una porción de la escena 25/47 del sistema de referencia mundial versión 2 (WRS2, por sus siglas en inglés), donde es posible observar la ciudad de Puebla en la parte central izquierda y el Pico de Orizaba en la parte central derecha. También es posible ver la presa de almacenamiento de Valsequillo y el Distrito de Riego 030. La imagen está generada con las bandas 1-4-7 (Azul, IRC e IRM2), para simular los colores primarios azul, verde y rojo; de esta manera se forma una imagen en falso color infrarrojo, donde la vegetación vigorosa resalta en color verde, mientras que el hielo se ve de color azul intenso. También se muestra el resultado de la clasificación genérica, donde se puede apreciar la identificación de las clases y compararla con la imagen en falso color. La precisión de un proceso de clasificación se refiere al grado de concordancia entre las clases de la imagen y un conjunto de datos de referencia. Para estimar de manera cuantitativa esta precisión, se construyó una matriz de error a partir de estos conjuntos de datos. La matriz consiste de un arreglo cuadrado de números ordenados en columnas e hileras que especifican el número de unidades muestrales asignadas a una categoría por el proceso de clasificación, en relación con la categoría de referencia. Las columnas corresponden al conjunto de referencia, mientras que las hileras corresponden a las clases generadas en el proceso. Debido a la característica del algoritmo de clasificación y a que no es necesario tener puntos de control terrestre para realizar el proceso, fue posible utilizar el método de muestreo aleatorio estratificado para formar la matriz de error a partir del resultado de la clasificación. El tamaño de la muestra se estimó mediante la fórmula para una distribución multinomial (Congalton y Green, 1999), para un nivel de confianza de 95% y una precisión de 5%: 622 VOLUMEN 40, NÚMERO 5 cond1 = (is > 0.2 ) ∩ ( ndvi < 0.01) ∩ ( ρ1 < 0.2 ) cond 2 = (is > 0.2 ) ∩ ( ndvi ≥ 0.01) ∩ ( ρ1 < 0.2 ) cond3 = [( Brillo > 0.2 ) ∩ ( BT < UT ) ∩ ( ndvi < 0.5)] ∪ ⎡ ⎣ ( ρ1 > ρ7 ) ∩ ( ρ2 > ρ3 ) ∩ ( ndvi < 0.1)⎤ ⎦ cond4 = ( ρ4 ≥ ρ5 ) cond5 = ρ5 > (0.5 * ( ρ4 + ρ7 )) cond6 = ρ4 > (0.35 * ρ3 + 0.65 * ρ5 ) cond7 = ( ig > 1.0 ) ∩ ( ig < 1.3) cond8 = ( ρ1 > ρ2 ) ∩ ( BT < UT ) ( ρ5 + ρ 7 ) < 0.6 ( ρ2 + ρ3 ) cond10 = ( ρ4 < 0.3) ∩ ( ρ5 < 0.15) ∩ ( ρ1 < 0.1) cond9 = Figura 8. Condiciones lógicas para la clasificación. Figure 8. Logical conditions for classification. A program in C++ language was coded in order to carry out generic classification. The program initially reads the thermal threshold and the reflectance matrices of the seven bands. Then it calculates the auxiliary variables and the logical conditions for each pixel. Finally, it classifies the scene based on the algorithm of Figure 9, and the result is kept in a matrix with the numerical values of Table 1, corresponding to each identified generic object. RESULTS AND DISCUSSION Since the operations of the algorithm are of Boolean character, their execution is rather fast; analyzing a complete ETM+ sensor scene (PC Intel Pentium III, 750 MHz) lasts around 4 minutes. In comparison, an algorithm of thematic classification like that of maximum likelihood or the analysis of clustering, may last a couple of hours in processing a complete scene. Figure 10 presents a segment of scene 25/47 of the World Reference System version 2 (WRS2), where the city of Puebla can be observed at the central left part, and the Pico de Orizaba at the central right part. Also the Valsequillo reservoir and Irrigation District 030 can be seen. The image is generated with the bands 1-4-7 (Blue, IRC, and IRM2) in order to simulate the primary colors blue, green, and red; this way, an image in false infrared color was created, where the vigorous vegetation is emphasized in green, while ice is seen in intense blue. The result of the generic classification is shown as well, where the identification of the classes can be appreciated and compared with the image in false color. The accuracy of a classification process refers to the degree of agreement between the classes of the image and a set of reference data. In order to estimate this accuracy quantitatively, a matrix of error was CLASIFICADOR GENÉRICO DE OBJETOS EN IMÁGENES ETM+ Figura 9. Algoritmo de clasificación genérica de objetos. Figure 9. Algorithm of generic object classification. ⎛ B Π i (1 − Π i ) ⎞ ⎟ n = max⎜ ⎟, i =1, 2,...,12 ⎜ b2 ⎠ ⎝ (9) donde Πi es la fracción de superficie correspondiente a la clase i; B es el valor de la distribución χ2(1, 0.995833)=8.21; b=0.05. Mediante este procedimiento se estimó un tamaño de muestra de 733, pero se ajustó a 732 al seleccionar 61 muestras por clase. Las muestras de suelos y los diferentes niveles de cobertura de la vegetación se obtuvieron a partir de datos de campo del Distrito de Riego 030, Valsequillo, mientras que las demás categorías se tomaron a partir de fotointerpretación de la imagen Landsat. Los valores en la diagonal principal de la matriz de error, esto es, donde coinciden las etiquetas de referencia y clasificación, corresponden a los aciertos del proceso. La precisión global de la clasificación constructed starting from these data sets. The matrix consists of a square with numbers arranged in columns and lines, specifying the sample number of units, assigned to a category by classification process, related to the reference category. The columns correspond to the reference set, while the lines correspond to the classes generated in the process. Due to the characteristic of the classification algorithm, and since ground control points are not needed to carry out the process, it was possible to use the method of stratified random sampling to form the error matrix from the classification result. Sample size was estimated by the formula for multinomial distribution (Congalton and Green, 1999), for a 95% confidence level and 5% precision. ⎛ B Π i (1 − Π i ) ⎞ ⎟ n = max⎜ ⎟, i =1, 2,...,12 ⎜ b2 ⎠ ⎝ PALACIOS-SÁNCHEZ et al. (9) 623 AGROCIENCIA, SEPTIEMBRE-OCTUBRE 2006 Sombra Nube Bruma Hielo Agua Asfalto/arena osc. Suelo Veg. baja cob. Veg. media cob. Veg. alta.cob. Veg. oscura Otros Falso color infrarrojo (R=7, V=4, A=1) Resultado de la clasificación genérica Figura 10. Resultado de la clasificación genérica de objetos. Figure 10. Result of the generic object classification. where Πi is the fraction of the surface corresponding to class i; B is the value of distribution χ2(1, 0.995833)=8.21; b=0.05. By this procedure a sample size of 733 was estimated, but it was fitted to 732 at selecting 61 samples per class. The soil samples and the different levels of vegetation coverage were obtained from the field data of Irrigation District 030, Valsequillo, whereas the rest of the categories were taken from the photo interpretation of the Landsat image. se obtiene dividiendo la suma de los valores de la diagonal principal entre el tamaño de la muestra, que para esta clasificación fue de 92.3%. Dividiendo el número de aciertos de una clase entre el número total de muestras en la columna se obtiene la precisión del productor del mapa y es un indicador de los errores de inclusión (errores de comisión), mientras que cuando se divide por el total de muestras en la hilera correspondiente, se obtiene la precisión del usuario, que es un indicador del error de exclusión (errores de omisión). En el Cuadro 4 se presenta la precisión del productor y del usuario para las 12 clases, así como la superficie estimada para cada clase. The values on the main diagonal of the error matrix, that is, where the labels of reference and Cuadro 3. Matriz de error de la clasificación genérica de objetos. Table 3. Error matrix of the generic object classification. Referencia Clases Sombra Nube Bruma Hielo Agua Asfalto/Ar.Osc. Suelo Veg. Baja C. Veg. Media C. Veg. Alta C. Veg. Osc. Otros Total 624 Sombra Nube Bruma Hielo Agua Asfalto/ Ar.Osc. 54 0 0 0 5 2 0 0 0 0 0 0 61 0 58 0 1 0 0 0 0 0 0 0 2 61 0 0 55 0 3 2 0 0 0 0 0 1 61 0 3 2 52 4 0 0 0 0 0 0 0 61 4 0 2 0 55 0 0 0 0 0 0 0 61 2 0 0 0 0 55 4 0 0 0 0 0 61 VOLUMEN 40, NÚMERO 5 Suelo 0 0 0 0 0 1 57 3 0 0 0 0 61 Veg. Baja C. 0 0 0 0 0 0 4 57 0 0 0 0 61 Veg. Media C. 0 0 0 0 0 0 0 2 58 1 0 0 61 Veg. Alta C. 0 0 0 0 0 0 0 0 2 59 0 0 61 Veg. Osc. 2 0 0 0 0 0 0 0 0 0 59 0 61 Otros Total 0 3 1 0 0 0 0 0 0 0 0 57 61 63 64 60 53 66 60 65 62 60 60 59 60 732 CLASIFICADOR GENÉRICO DE OBJETOS EN IMÁGENES ETM+ Cuadro 4. Precisiones del productor y del usuario. Table 4. Producer’s and user’s accuracy. Precisión (%) Núm. 1 2 3 4 5 6 7 8 9 10 11 12 Productor Usuario Superficie (ha) 88.5 95.1 90.2 85.2 90.2 90.2 93.4 93.4 95.1 96.7 96.7 93.4 85.7 90.6 91.7 98.1 83.3 91.7 87.7 91.9 96.7 98.3 100.0 95.0 29 531 61 979 76 737 893 1488 25 957 60 458 254 858 578 589 517 657 111 143 138 Clase Sombra Nube Bruma Hielo Agua Asfalto/Ar.Osc. Suelo Veg. Baja C. Veg. Media C. Veg. Alta C. Veg. Osc. Otros El algoritmo no siempre separa las sombras de los cuerpos de agua, debido a que tienen firmas espectrales muy parecidas. En estos casos hay que utilizar métodos geométricos que calculen la proyección de sombras sobre la superficie terrestre, para diferenciar las dos clases. El hielo es otra clase con valores de la precisión del productor bajos, ya que existe confusión con las nubes y en los límites de la nieve con otras clases se confunde con el agua. En términos generales, la clasificación genérica de objetos tiene una precisión bastante alta comparada con los métodos tradicionales de clasificación. Combinado con estadísticas de producción agrícola y sistemas de información geográficos, el algoritmo se ha utilizado con éxito en la cuantificación de superficies de cultivos bajo riego en zonas áridas y semiáridas, así como en la identificación de cuerpos de agua en las Unidades de Riego para el Desarrollo Rural (Colegio de Postgraduados, 2000-2002)1, y en varias zonas de riego con fuentes de agua subterránea. CONCLUSIONES En este trabajo se ha presentado un algoritmo de clasificación genérica, que permite identificar 12 objetos de interés para el estudio de los recursos naturales. El algoritmo no requiere campos de entrenamiento ni análisis de agrupaciones para realizar la clasificación. Es del tipo de árboles de decisión, en el que las reglas de clasificación se basan en operaciones boleanas que identifican los objetos por formas características de su firma espectral. Por lo mismo, la clasificación la realiza de una manera rápida y precisa en relación con algoritmos de clasificación tradicionales como son el de máxima verosimilitud classification coincide, correspond to the correct decisions of the process. The global accuracy of classification is obtained dividing the sum of values of the main diagonal by the sample size, which was 92.3% for this classification. Dividing the number of correct classified samples of one class by the total number of samples in the column, the map producer’s accuracy is obtained, which is an indicator of the inclusion errors, whereas at dividing by the total of samplings in the corresponding line, user’s accuracy is obtained, indicator of the exclusion errors (omission errors). Table 4 shows producer’s and user’s accuracy for the 12 classes, as well as the estimated surface for each class. The algorithm does not always separates the shadows of the water bodies, because they have very similar spectral signatures. In these cases geometrical methods have to be used, which calculate the projection of shadows on the earth’s surface, in order to differentiate the two classes. Ice is another class with low values of producer’s accuracy, since there is confusion with clouds, and at the limits of snow with other classes it is confused with water. In general terms, generic object classification has rather high precision compared with the traditional classification methods. Combined with statistics of agricultural production and geographic information systems, the algorithm has been utilized successfully in quantifying of crop areas under irrigation in arid and semi-arid zones, as well as in the identification of water bodies in Irrigation Units for Rural Development (Colegio de Postgraduados, 2000-2002)1, and in several irrigation zones with underground water sources. CONCLUSIONS In this paper, an algorithm of generic classification has been presented, which permits to identify 12 objects of interest for the study of natural resources. The algorithm does not require training areas or clustering analysis to carry out the classification. It is the type of decision trees, on which the classification rules are based on Boolean operations, which identify the objects by the characteristic forms of their spectral signature. Likewise, the classification is carried out fast and precisely in relation with traditional classification algorithms, such as the one of maximum likelihood or of clustering analysis. The algorithm has been used successfully in the estimate of surfaces sown with crops and in the identification of water bodies. —End of the English version— 1 Colegio de Postgraduados. 2000-2002. Estimación de Superficies Regadas y Volúmenes Utilizados en Unidades de Riego Mediante Técnicas de Percepción Remota. Trabajo realizado por convenio de participación para la Comisión Nacional del Agua. PALACIOS-SÁNCHEZ et al. 625 AGROCIENCIA, SEPTIEMBRE-OCTUBRE 2006 o de análisis de agrupaciones. El algoritmo se ha utilizado con éxito en la estimación de superficies sembradas de los cultivos y en la identificación de cuerpos de agua. LITERATURA CITADA Breiman L., J. Friedman, R. Olshen, and C. Stone. 1984. Classification and Regression Trees. Wadsworth International Group. 368 p. Byeungwoo J., and D. Landgrebe. 1999. Partially supervised classification using weighted unsupervised clustering. IEEE Transactions on Geoscience and Remote Sensing. Vol. 37, No. 2. pp: 1073-1079. Congalton, R. G., and K. Green, 1999. Assessing the Accuracy of Remotely Sensed Data: Principles and Practices. Lewis Publishers, Boca Raton, FL. 160 p. Cortijo, F. J., N. Pérez de la Blanca, J. Abad, and S. Damas. 1997. A comparison of multispectral image classifiers using highdimensional simulated data sets. VII National Symposium on Pattern Recognition and Image Analysis, Barcelona (Spain). pp: 365-370. Cheng H., and C. A. Bouman. 2001. Multiscale Bayesian Segmentation Using a Trainable Context Model. IEEE Transactions on Image Processing, Vol. 10, No. 4. pp: 511-525. 626 VOLUMEN 40, NÚMERO 5 Chulhee L., and D. Landgrebe. 1991. Fast multistage likelihood classification. IEEE Transactions on Geoscience and Remote Sensing, Vol. 29, No. 4, pp: 509-517. Jensen, J. R. 2000. Remote Sensing of the Environment: An Earth Resource Perspective. Upper Saddle River, New Jersey. Prentice Hall. 544 p. Kuusk, A. 2001. A two-layer canopy reflectance model. Journal of Quantitative Spectroscopy and Radiative Transfer. Volume 71, Issue 1. pp: 1-9. Lobell D., and G. Asner. 2002. Moisture effects on soil reflectance. Soil Scientific American Journal 66: 722-727. McCauley, D. 1995. Comparison of scene segmentations and classifications. SMAP, ECHO, and maximum likelihood. IEEE Transactions on Geoscience & Remote Sensing, Vol. 33, No. 6: 1313-1316. Moore, G. K. 1978. Satellite Surveillance of Physical Water Quality Characteristics, en Proc. Twelfth International Symposium on Remote Sensing of Environment, Environmental Research Institute of Michigan, Ann Harbor, MI. pp: 445-462. NASA. 2001. Landsat 7 Science Data Users Handbook, http:// ltpwww.gsfc.nasa.gov/IAS/handbook/handbooktoc.html. Noviembre de 2004. Schowengerdt, R. A. 1997. Remote Sensing-Models and Methods for Image Processing. Academic Press. 522 p. Stoner, E. R., and M. F. Baumgardner. 1981. Characteristic variations in reflectance of surface soils. Soil Scientific American Journal 45: 1161-1165.