7_Sensor de ángulo de paso colectivo
Anuncio

INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
4 Sensor del ángulo de paso colectivo y cálculo
numérico de su derivada
En este capítulo se realiza una descripción detallada tanto de la solución adoptada
para obtener una medida del ángulo de paso colectivo de las palas del helicóptero como
de los procedimientos empleados para obtener dicha solución. También se describe el
cálculo numérico de la derivada del ángulo de paso en la sección que detalla el
desarrollo del programa informático. El cálculo numérico de la derivada se considera
un problema secundario y se abordó una vez el sistema proporcionaba medidas
correctas del paso colectivo. El proceso de obtención de la solución al problema
primario o de la medida del paso se puede separar en tres vertientes que parten de una
idea inicial en la que se concreta qué tipo de sensor se va a implementar y deben
converger en un dispositivo plenamente funcional. Estas tres vertientes son:
•
•
•
El diseño de la configuración física del sensor y su construcción (sujeciones
mecánicas, conexiones eléctricas, etc.).
El estudio del sensor y la interpretación y traducción de las medidas que
proporciona, de forma que sepamos exactamente qué tipo de dato llega al
circuito de adquisición de datos de la caja de aviónica. En apartados
posteriores nos referiremos a esta tarea como la caracterización del sensor.
El diseño de los algoritmos lógicos y de cálculo que forman parte de la
aplicación informática con la que debe interactuar el usuario, así como la
programación de la propia aplicación. Dicha aplicación debe procesar
correctamente la medida recibida del circuito de adquisición de datos y
devolver al usuario en distintos soportes un valor con las dimensiones
físicas adecuadas.
Esta estructura de procesos en paralelo responde a la complejidad intrínseca del
proyecto. Desarrollar los distintos aspectos del proyecto en paralelo ha conducido a
diversas relaciones transversales entre las vertientes, que con frecuencia se han visto
paralizadas hasta que un hito necesario de otra vertiente se completaba. Es el caso del
programa informático, que no se ha validado hasta que el sensor estaba caracterizado y
una construcción temporal que permitiera realizar las pruebas pertinentes estaba
operativa. Dichas pruebas se realizaron primero con un nivel como aparato de medida
auxiliar y modificando el paso colectivo de forma manual, y posteriormente con una
regresión lineal de la tensión en el potenciómetro en función del ángulo de paso,
operando las palas mediante el servomecanismo de paso colectivo. Sin embargo, el
programa informático fue la primera vertiente en desarrollarse, ya que una gran parte
del trabajo inicial del proyecto fue adquirir unos conocimientos sólidos de
programación en C, suficientes para elaborar un programa que cumpliera con los
requisitos establecidos.
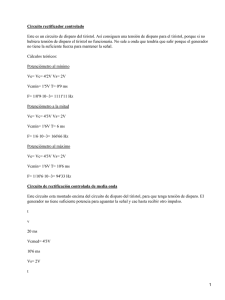
Las relaciones cronológicas entre los distintos hitos de las tres vertientes son
complejas, y se presentan a continuación en un diagrama de flujo de forma resumida.
Se han utilizado iconos con forma de semáforo para indicar que un hito de la vertiente A
estaba paralizando el desarrollo de la vertiente B.
4:1
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
Figura 4.1: Diagrama de flujo del proceso de diseño
4:2
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
4.1 Alternativas tecnológicas
Previo a la elección de un sensor específico se realizó un estudio de las posibles
tecnologías y dispositivos representativos de cada una que fueran aplicables al proyecto.
Siempre bajo el paraguas de los criterios ya mencionados en la introducción, se
consideran adicionalmente algunos condicionantes particulares de un sensor de estas
características:
•
•
•
Características de la medida: Son factores determinantes para la elección
el tipo de salida que emite el sensor y su compatibilidad con el circuito de
adquisición de la caja de aviónica.
Interferencias: Distintas tecnologías sufren interferencias de naturalezas
dispares. Considerando el contexto en el que se va a emplear el sensor,
hay tecnologías preferentes porque el tipo de interferencia (óptica,
electromagnética, mecánica...) que más le afecta es de poca importancia
en nuestra aplicación
Configuración física: Es crucial conocer la fisonomía y las dimensiones
del sensor para determinar su selección. Existe un número limitado de
posibles colocaciones (debe estar de alguna forma ligado al mecanismo de
paso colectivo) y el sensor debe adaptarse a alguna de ellas sin alterar
excesivamente la geometría y la distribución de pesos del helicóptero.
El estudio proporcionó tres tecnologías candidatas a cumplir la funcionalidad
exigida;
el potenciómetro de desplazamiento angular, el potenciómetro de
desplazamiento lineal y el codificador óptico. Cada una presenta ventajas e
inconvenientes que se reconocerán con una descripción breve de las tres.
Codificador óptico
Un codificador óptico digital es un dispositivo que convierte un desplazamiento en
un código digital detectando las zonas iluminadas y oscuras que se producen al
atravesar un haz de luz una plantilla de sectores opacos y transparentes. Según el tipo
de desplazamiento que se quiera medir, existen codificadores lineales para medir
desplazamientos lineales y rotativos para medir desplazamientos angulares. La
plantilla, de material plástico o cristal, se diseña de forma que contiene varias pistas,
representando cada pista un bit del código. Cuantas más pistas, mayor resolución se
tiene dentro del recorrido del dispositivo. En el caso que nos concierne, el recorrido es
de un sector angular que generalmente será de una vuelta completa ó 360º. A modo de
ejemplo, un codificador de 360º y ocho pistas (ocho bits) proporcionará una resolución
de 1.406 (360/256) grados. Las pistas, en el codificador rotativo, son anillos
concéntricos del disco, como se ilustra en la siguiente página. En la práctica se divide el
recorrido total del sensor en 2N sectores equidistantes, siendo N el número de pistas y
por tanto de bits de que dispone. A cada sector le corresponde un código unívoco de
bits (esta estructura corresponde a un codificador absoluto, distinta de la de un
codificador incremental). Aunque para transmitir la información del sensor a un
computador es deseable utilizar codificación binaria, en la práctica se utiliza a menudo
la codificación Gray, que garantiza transiciones suaves de las medidas entre sensores.
4:3
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
Figura 4.2: Codificador óptico
En la codificación binaria ordenamos los sectores en los que dividimos el recorrido
de forma ascendente, de forma que cuando el sensor transiciona entre dos puntos
inmediatos del recorrido que pertenezcan a sectores distintos, nos puede cambiar el
código por completo, modificando más de un bit. Tómese como ejemplo el paso, en un
código de 2 bits, del sector 1 (0 1) al sector 2 (1 0). En teoría, esto no debería presentar
problema, y el computador interpretaría el cambio de sector correctamente. En la
práctica, cada bit del código es un pulso que se transmite al circuito de adquisición del
computador. Debido a pequeñas imperfecciones, una de las dos pistas transicionará
primero y su señal llegará antes, introduciendo códigos de otros sectores en medio de la
transición, y no podemos controlar cual de ellas lo hace. El computador interpretará
saltos entre sectores que no son adyacentes y al no ver el movimiento del codificador,
no podrá discernir entre movimientos irreales y movimientos verdaderos. En un sistema
de control en tiempo real esto puede provocar comportamientos anómalos y resultar
catastrófico.
En la codificación Gray se resuelve el problema de la codificación binaria
introduciendo un ordenamiento de los códigos que garantice que en las transiciones
entre sectores adyacentes sólo cambie un bit del código. Así se elimina la posibilidad
de que aparezcan códigos en medio de una transición que proporcionen valores
disparatados del desplazamiento. En el código Gray, la incertidumbre en una transición
es de un bit, mientras que en código binario, la incertidumbre puede ser de varios.
Antes de transmitir los pulsos al computador se pasan por un circuito lógico para
traducir a código binario.
Como se mencionaba al principio, existen además dos familias de codificadores
según su forma de operar: el codificador absoluto y el codificador incremental. El
absoluto asigna un código distinto a cada sector del recorrido. El codificador
incremental sólo tiene 2 pistas cuyos pulsos están desfasados 90º. El desplazamiento se
calcula a partir del estado anterior, y gracias al desfase entre ambas pistas, se puede
distinguir en que sentido se produce. Con este método se puede calcular también la
velocidad de desplazamiento. En algunos codificadores incrementales se introduce una
tercera pista de referencia que marca con un solo pulso el 0 para poder medir
desplazamientos absolutos.
4:4
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
Potenciómetros
Un potenciómetro consiste en una resistencia eléctrica de tres terminales en la que
se puede desplazar uno de los terminales para crear un divisor de tensiones variable. Si
sólo se conectan el terminal variable y uno de los fijos se tiene un reostato o resistencia
variable. La aplicación principal de los potenciómetros es el control de dispositivos
eléctricos analógicos. Desplazando un actuador se varía de forma continua un nivel de
tensión y se puede regular una salida de un circuito eléctrico. Esta tecnología se puede
aplicar directamente para medir el desplazamiento de un mecanismo. El actuador se
debe ligar de forma solidaria al mecanismo cuyo desplazamiento se quiere medir. Si se
establecen correctamente las relaciones cinemáticas entre ambos se puede interpretar la
variación de tensión en la salida del potenciómetro como un desplazamiento conocido
entre dos posiciones del mecanismo.
Los potenciómetros son dispositivos relativamente económicos y muy utilizados en
la industria a todos los niveles de especificación. Además, al consistir en un circuito de
resistencias (e interruptores y otros añadidos de mayor complejidad), prácticamente
cualquier diseño es posible. En cuanto al tipo de desplazamiento del actuador se puede
distinguir entre deslizantes o de desplazamiento lineal y rotativos o de desplazamiento
angular. En cuanto a materiales suelen fabricarse con resistencias cerámicas, de
composite metálico-cerámico, de plástico conductor o de cable arrollado de cobre. El
cuerpo se fabrica de algún material aislante, como medida de seguridad para el usuario,
que suele ser termoplástico o termoestable. A continuación se muestran el circuito
eléctrico representativo y la ecuación que determina la tensión de salida en el terminal
variable conocidas las resistencias.
Figura 4.3: Circuito eléctrico de un potenciómetro
4:5
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
Los potenciómetros deslizantes se utilizan en equipos de sonido como “faders” o
atenuadores. Varían la resistencia mediante un desplazamiento rectilíneo del actuador.
Su utilidad en nuestra aplicación radica en que el movimiento del plato deslizante en
movimientos del mecanismo colectivo es rectilíneo a lo largo del eje del rotor. El
problema principal es que dicho plato se encuentra en una zona del helicóptero con
pocos puntos de agarre para una estructura que fije el potenciómetro de forma
satisfactoria.
Los potenciómetros de desplazamiento angular se utilizan en multitud de
reguladores de potencia, amplificadores de señal, y como transductores de posición de
elementos rotativos en diversas aplicaciones. Varían la resistencia mediante la rotación
del actuador, que suele ser una rueda, en torno a un eje fijo, que está ligado al cuerpo
del potenciómetro. Un contacto deslizante anular en la base del eje realiza la variación
efectiva de resistencia.
Su utilidad en nuestra aplicación radica en que el
servomecanismo que mueve el mecanismo de paso colectivo gira en torno a su eje, y a
través de una serie de rótulas, palancas y brazos mecánicos, transmite el movimiento al
colectivo de las palas. Un potenciómetro de desplazamiento angular se puede acoplar
con relativa facilidad al servomecanismo de forma que el giro de éste último provoque
la variación de resistencia en el primero. El principal problema es que no se conocen
las leyes cinemáticas que rigen los movimientos del complejo mecanismo de paso
colectivo. Sin embargo, las leyes cinemáticas exactas se pueden sustituir por leyes
empíricas y regresiones. A continuación se muestran ilustraciones de ambos tipos de
potenciómetros.
Figura 4.4: Potenciómetro rotatorio y potenciómetros lineales o deslizantes
Como último aspecto relevante de los potenciómetros es necesario explicar en qué
consiste la ley desplazamiento-resistencia, más conocida como ley o taper del
potenciómetro. Un potenciómetro se puede diseñar de forma que la resistencia, y por
tanto la tensión de salida, varíen según cualquier ley que no sea necesariamente
directamente proporcional al desplazamiento del actuador. En la práctica, muchos
potenciómetros llevan leyes lineales, otros logarítmicas y exponenciales, y otros llevan
leyes compuestas para aplicaciones más específicas. La ley del potenciómetro se puede
4:6
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
optimizar para la funcionalidad que se le quiere dar. Por ejemplo, el mando de volumen
de un equipo suele llevar una ley logarítmica debido a que el tímpano humano suele
presentar una respuesta logarítmica al incremento de presión de las ondas sonoras. Así,
un desplazamiento equivalente proporciona la misma sensación de aumento de volumen
en sectores de volumen dispares. En nuestra aplicación interesa un potenciómetro de
ley lineal, ya que la variación de paso de la pala en cualquier intervalo del rango de
movimiento es directamente proporcional al desplazamiento angular del
servomecanismo y al desplazamiento vertical del plato deslizante.
4.1.1 Potenciómetro de desplazamiento angular
La tecnología del potenciómetro de desplazamiento angular se eligió para su
aplicación a este proyecto por cumplir los requisitos del mismo y presentar ciertas
ventajas frente al potenciómetro de desplazamiento lineal y frente al codificador óptico.
Entre ellas es destacable la gran profusión de potenciómetros angulares en el mercado y
su reducido coste frente al codificador óptico. Además, el codificador óptico de
especificación comercial, aunque proporciona directamente un valor en formato digital
que nos ahorra el proceso de conversión A/D, no presenta mejor resolución que el
conversor de la placa Hércules. A esto hay que añadir la relación dispar de precios
entre los potenciómetros y codificadores ópticos disponibles en el mercado. Mientras
que los codificadores ópticos no bajan de los 100 euros, existen potenciómetros con
tolerancias de error suficientes para nuestra aplicación cuyo precio no supera los 20
euros.
Frente a los potenciómetros deslizantes, el potenciómetro rotativo presenta ventajas
tanto en la facilidad de su instalación como en su disponibilidad. Existe una gama más
amplia de potenciómetros rotativos y más adecuada a nuestras necesidades, mientras
que los potenciómetros deslizantes encontrados eran o de calidad insuficiente o de
calidad y coste excesivos para nuestro proyecto. En cuanto a la facilidad de instalación,
no se ha encontrado solución para un potenciómetro deslizante equiparable en
simplicidad y garantías estructurales a la que se ha implementado con potenciómetro
angular.
Aplicación
Como ya sabemos, el potenciómetro de desplazamiento angular consiste en una
resistencia variable cuyo valor es proporcional al giro que se produce en un eje que va
unido solidariamente al actuador del potenciómetro. Este mismo eje se une en su base
al cuerpo del potenciómetro pero con libertad de rotación. El contacto eléctrico que se
produce en esta unión es de resistencia variable con dicha rotación. La solución
implementada contempla unir solidariamente el eje giratorio al eje del servomecanismo
de paso colectivo y unir el cuerpo del potenciómetro al fuselaje para que no existan
movimientos relativos entre ambos. Al estar el cuerpo del servomecanismo también
solidariamente unido al fuselaje, se consigue que no existan movimientos relativos entre
el cuerpo del servomecanismo y el cuerpo del potenciómetro, y el ángulo girado por el
eje del servomecanismo será idéntico al ángulo girado por el eje del potenciómetro.
4:7
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
Una vez se consigue el movimiento solidario de ambos ejes, se obtiene una
variación de tensión en la salida del potenciómetro que tiene una relación funcional, a
priori desconocida, con la variación de ángulo de paso colectivo de las palas del rotor
principal. Descartado el estudio cinemático riguroso del mecanismo de paso colectivo
del Raptor, se optó por utilizar una regresión basada en medidas de tensión con varios
ángulos de paso conocidos para aproximar dicha relación funcional. Se demostró la
hipótesis de que la relación era cuasi-lineal, hipótesis basada en que todos los giros de
los elementos del mecanismo son de ángulos pequeños, en que el movimiento de dichos
elementos es aproximadamente plano, y en que la ley del potenciómetro es lineal.
4.1.2 El Potenciómetro Vishay 132-2-0-102 100 Ω
La elección del potenciómetro angular de la casa Vishay responde de forma muy
satisfactoria a las necesidades del proyecto por diversos motivos:
•
•
•
•
•
•
Su diseño de aplicación industrial es estanco y duradero, con eje de acero
y cuerpo de termoplástico de alta resistencia.
Ofrece un par de resistencia de 72 g.cm frente a los más de 3000 g.cm
que puede generar el servomecanismo de paso colectivo, por lo que el
movimiento libre del mecanismo no se ve afectado.
Su tamaño es lo suficientemente reducido para incorporarlo sin
problemas al fuselaje del Raptor. Su peso es inferior a 30 gramos.
Su recorrido es de más de 300º, varias veces mayor que el recorrido del
servo, de aproximadamente 80º.
Su resistencia eléctrica es suficiente para soportar sin problemas los 10 V
de alimentación de la Hércules de forma continua.
Al ser lineal, la traducción de sus valores de tensión a valores de ángulo
girado es una proporción sencilla.
Sus dimensiones son tales que cabe en un cilindro de 33.32 milímetros de diámetro
y 42.75 mm de altura, incluidas las terminales de sus líneas eléctricas. El cuerpo tiene
33.32 mm de diámetro y 15.88 mm de altura y el eje tiene 6.34 mm de diámetro y 22.22
mm de altura. Cabe destacar que el diámetro del eje, al no ser un valor normalizado de
broca de 6.25 o 6.5 mm, provocó la necesidad de utilizar un torno de cilindrado para
poder encajarlo en un hueco de 6.25 mm originales de diámetro, que se cilindraron hasta
los 6.34 del eje. Este inconveniente no se previó en la elección del potenciómetro pero
fue solucionado utilizando el torno de precisión. En la página siguiente se presenta un
plano acotado del potenciómetro, medidas en pulgadas (mm entre paréntesis):
4:8
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
Figura 4.5: Plano acotado del potenciómetro empleado
En cuanto a sus especificaciones mecánicas, cabe destacar que tiene un recorrido de
340º con topes en ambos extremos. Estos topes resisten hasta 9.21 kg.cm, que es más
del doble que el par máximo que puede generar el servomecanismo, por lo que la
integridad de los topes no corre peligro. El par de oposición dentro del recorrido es de
72 g.cm parado y de 50.4 g.cm en rotación. El peso total del potenciómetro es de 28.35
gramos.
En cuanto a sus especificaciones eléctricas, cabe destacar que soporta una tensión
máxima entre bornas de 16.6 V y tiene una resolución máxima de 0.251% de la tensión
de alimentación. Su consumo nominal es de 2.8 W desde los 0 hasta los 40º C de
temperatura ambiente, muy inferior a la potencia total que puede proporcionar la placa
con sus circuitos de alimentación, que oscila entre los 24 y los 40 W según la velocidad
de procesamiento de la misma. Su resistencia total es de 100 Ω, con una tolerancia
nominal de ±3%. Se garantiza la linealidad del potenciómetro en ±1% nominal, ±0.5%
en la configuración más favorable. Para más detalles y especificaciones adicionales
referirse al Anexo C.
4:9
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
4.2 Adquisición de las medidas
Una vez elegido un sensor y conocida la señal que proporciona, es necesario diseñar
toda la infraestructura eléctrica que transporte dicha señal al sistema de aviónica y toda
la aplicación informática que interprete las señales digitales y las convierta en variables
en memoria con valores de una magnitud física (en nuestro caso ángulos). En la sección
anterior se ha descrito la señal que proporciona el potenciómetro, que es un nivel
analógico de tensión. La placa Hércules dispone de un circuito de adquisición de datos
analógicos con un convertidor de analógico a digital que transforma un nivel de tensión
dado en un valor digital en memoria. A continuación se describe dicho circuito.
4.2.1 Subsistema de adquisición de datos analógicos
El subsistema de adquisición de datos analógicos tiene un circuito de entradas y
salidas de 40 pines. Se alimenta con una tensión de 5 Vcc ± 5% y consume una
corriente de entre 0.7 y 1.1 A. Puede operar a temperaturas mínimas de 40º C bajo cero
y máximas de 85 º C; y a humedad ambiental comprendida entre el 5% y el 95% sin
condensación. El circuito dispone de 32 líneas configurables en modo común y 16 si se
opera en modo diferencial con las siguientes características:
•
•
•
•
•
•
Tasa de muestreo máxima de 250 KHz.
Ganancias y rangos de entrada programables, con un rango máximo de ±10V
(bipolar) ó 0-10V (unipolar).
Rangos de entrada tanto bipolares como unipolares.
5 ppm / ºC de desviación de exactitud.
Disparo A/D tanto interno como externo.
1048-FIFO “buffer” de muestreo.
4:10
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
Entradas analógicas
Las especificaciones de las entradas se presentan en la siguiente tabla:
ENTRADAS ANALÓGICAS
Número de líneas
16 en modo diferencial y 32 en modo común, opción
configurable por el usuario
Resolución de la
conversión A/D
Rangos de entrada
16 bits (1/65536 de la escala total)
Bipolar: ±10 V, ±5 V, ±2.5 V, ±1.25 V
Unipolar: 0-10 V, 0-5 V, 0-2.5 V
50 nA máx
Entrada de IBIAS
Máximo voltaje de
entrada
Protección de
sobrevoltaje
±10 V para operación lineal
±35 V en cualquiera de las entradas sin daños
5 ppm º/C típica
Desviación
100000 muestras/s máx
Tasa de conversión
No-linealidad
±3 LSB, sin pérdida de código
Disparo de la
conversión
Software, reloj interno o señal externa TTL
FIFO
48 muestras. Umbral de interrupción programable
Figura 4.6: Especificaciones del circuito de entradas analógicas
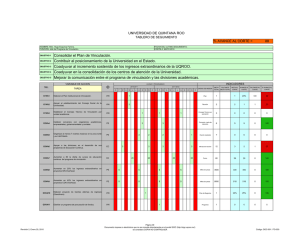
Dentro del análisis que se está realizando de las entradas y salidas analógicas de la
placa Hercules, se van a incluir algunos detalles interesantes sobre la resolución que se
pueden obtener a la hora de medir las tensiones en las entradas analógicas según el
modo y rango de entrada que se programen. Esta resolución vendrá impuesta por el
conversor Analógico/Digital que como ya se ha dicho será de 16 bits (1/65536 de la
escala total). Realizando unos sencillos cálculos se obtiene la tabla de resultados que se
expone en la siguiente página.
4:11
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
POLARIDAD
BIPOLAR
UNIPOLAR
PROYECTO DE FIN DE CARRERA
RANGO DE ENTRADA
RESOLUCIÓN
±10 V
305 µV
±5 V
153 µV
±2.5 V
76 µV
±1.25 V
38 µV
0-10 V
153 µV
0-5 V
76 µV
0-2.5 V
38 µV
0-1.25 V
19 µV
Figura 4.7: Resolución del circuito de entradas analógicas
Salidas analógicas
La Hércules proporciona 4 salidas analógicas independientes con las siguientes
características:
•
•
•
•
Resolución de 12 bits
Rangos de salida de ±10 V en bipolar y 0-10 V en unipolar
Actualización simultánea
Rango de salida ajustable (opción de configuración por encargo)
Sus especificaciones se detallan en la tabla expuesta en la siguiente página:
4:12
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
SALIDAS ANALÓGICAS
4
Número de salidas
12 bits (1/4096 de la escala total)
Resolución de la conversión D/A
Bipolar: ±10 V programable
Unipolar: 0-10 V programable
Rangos de salida
±5 mA máx. por canal
Corriente de salida
4 µs máx. para ± 1/2 LSB
Tiempo de asentamiento
±1 LSB
Exactitud relativa
±1 LSB monotónico
No-linealidad
Figura 4.8: Especificaciones del circuito de salidas analógicas
El conector del circuito al exterior tiene las siguientes características:
•
•
•
Conexión con la placa: Phyco 2120-50S
Cable de tipo cinta estándar (Ribbon)
Conexión al exterior: conector hembra de tipo cinta estándar 2x20 0.1”
Figura n:
A continuación se muestra el listado detallado de las líneas del circuito:
Figura 4.9: Conector del circuito de entradas y salidas analógicas
En la siguiente página se muestra la relación de pines del conector en ambos modos
de operación, común y diferencial.
4:13
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
MODO COMÚN
Vout 0
1
2
Vout 1
Vout 2
3
4
Vout 3
Output Ground
5
6
Output Ground
Vin 0
7
8
Vin 16
Vin 1
9
10
Vin 17
Vin 2
11
12
Vin 18
Vin 3
13
14
Vin 19
Vin 4
15
16
Vin 20
Vin 5
17
18
Vin 21
Vin 6
19
20
Vin 22
Vin 7
21
22
Vin 23
Vin 8
23
24
Vin 24
Vin 9
25
26
Vin 25
Vin 10
27
28
Vin 26
Vin 11
29
30
Vin 27
Vin 12
31
32
Vin 28
Vin 13
33
34
Vin 29
Vin 14
35
36
Vin 30
Vin 15
37
38
Vin 31
Input Ground
39
40
Input Ground
Figura 4.10: Listado de las 40 líneas del circuito de entradas y salidas. Modo común.
4:14
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
MODO DIFERENCIAL
Vout 0
1
2
Vout 1
Vout 2
3
4
Vout 3
Output Ground
5
6
Output Ground
Vin 0 +
7
8
Vin 0 -
Vin 1 +
9
10
Vin 1 -
Vin 2 +
11
12
Vin 2 -
Vin 3 +
13
14
Vin 3 -
Vin 4 +
15
16
Vin 4 -
Vin 5 +
17
18
Vin 5 -
Vin 6 +
19
20
Vin 6 -
Vin 7 +
21
22
Vin 7 -
Vin 8 +
23
24
Vin 8 -
Vin 9 +
25
26
Vin 9 -
Vin 10 +
27
28
Vin 10 -
Vin 11 +
29
30
Vin 11 -
Vin 12 +
31
32
Vin 12 -
Vin 13 +
33
34
Vin 13 -
Vin 14 +
35
36
Vin 14 -
Vin 15 +
37
38
Vin 15 -
Input Ground
39
40
Input Ground
Figura 4.11: Listado de las 40 líneas del circuito de entradas y salidas. Modo diferencial.
4:15
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
A la vista de las características de los canales de entrada y salida analógicas, se
concluye que la configuración óptima de conexión entre el potenciómetro y la placa
Hércules sería alimentar el potenciómetro mediante una salida analógica unipolar con
un rango de 0-10 V y capturar la salida de éste mediante una entrada analógica también
configurada en modo común y que mida dentro de un rango de 0-10 V. Con esta
configuración se pierde resolución en las entradas analógicas de la placa según la tabla
n, pero debído a que el potenciómetro es una resistencia eléctrica variable y su tensión
de salida es proporcional a la de entrada, cuanto mayor sea la alimentación mayor será
el recorrido en tensiones para el mismo desplazamiento angular. Por lo tanto, aunque la
resolución de la medición es menor, el incremento de tensión por grado girado es
mayor, y ambos efectos se contrarrestan.
Una vez se ha decidido la configuración que tendrán nuestras conexiones (la cual se
impondrá por programación) ya se puede realizar la conexión física entre el
potenciómetro y el subsistema de adquisición de datos. Para imponer una caída de
tensión de 10 Voltios entre los pines 1 y 3 del potenciómetro, se conecta el pin 1 del
potenciómetro a la salida analógica Vout 1 (pin 2 del conector analógico) y el pin 3 del
potenciómetro a tierra (pin 6 del conector analógico). Para obtener la señal (variación de
voltaje) se conecta el pin 2 del potenciómetro a la entrada analógica Vin 16 (pin 8) y el
pin 3 de nuevo a tierra, pero en este caso a tierra de entrada analógica (pin 40). A
continuación se muestran las conexiones en el potenciómetro, donde los números dentro
de las flechas indican las líneas del conector analógico a las que va conectada cada toma
del potenciómetro. En la siguiente página se muestran las conexiones en el conector
analógico. El código de colores empleado responde al color de cada cable en el
montaje.
Figura 4.12: Conexiones entre el potenciómetro y el circuito analógico de la placa
4:16
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
MODO COMÚN
Vout 0
1
2
Vout 1
Vout 2
3
4
Vout 3
Output Ground
5
6
Output Ground
Vin 0
7
8
Vin 16
Vin 1
9
10
Vin 17
Vin 2
11
12
Vin 18
Vin 3
13
14
Vin 19
Vin 4
15
16
Vin 20
Vin 5
17
18
Vin 21
Vin 6
19
20
Vin 22
Vin 7
21
22
Vin 23
Vin 8
23
24
Vin 24
Vin 9
25
26
Vin 25
Vin 10
27
28
Vin 26
Vin 11
29
30
Vin 27
Vin 12
31
32
Vin 28
Vin 13
33
34
Vin 29
Vin 14
35
36
Vin 30
Vin 15
37
38
Vin 31
Input Ground
39
40
Input Ground
Figura 4.13: Líneas empleadas para leer la señal del potenciómetro
4:17
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
4.3 Desarrollo de los programas informáticos
El programa informático que obtiene los valores de ángulo de paso y su derivada ha
sido desarrollado en C y se ejecuta en un sistema operativo Real Time Linux. Su
nombre, en su versión definitiva que almacena los datos recogidos en memoria
permamente, es dcolecdsk.exe, su código C es dcolecdsk.c, y el archivo de cabecera que
acompaña al código es dcolecdsk.h. En pocas líneas, el programa inicia un menú en el
que el usuario puede decidir si arranca el proceso de adquisición de medidas, borra
archivos de datos generados en medidas anteriores, o sale de la aplicación. Además,
pulsando una tecla el usuario arranca el proceso de medidas y pulsando otra lo detiene.
Una vez detenida la batería de medidas se genera de forma automática un archivo con
los datos más relevantes de las medidas (paso colectivo medido, velocidad de variación
del paso colectivo y etiqueta de tiempo de la muestra) con formato
datos_colectivo_xx.txt.
4.3.1 Algoritmo
La estructura del programa desarrollado sigue las pautas que proporciona el
fabricante de la Hércules para elaborar código que gestione el funcionamiento de la
placa y las que a su vez se implementan en programas desarrollados anteriormente para
otros sensores implementados en el helicóptero. En líneas generales, consta de una fase
de inicialización, una de definición de los parámetros de configuración y una de toma de
medidas que se ejecuta de forma recursiva, siguiendo las instrucciones del usuario
mediante un menú, hasta que se sale del programa y se liberan los recursos utilizados
mediante la pulsación de la tecla ‘P’.
En la primera etapa del programa se inicializa el driver de la Hércules, librería de
funciones que permiten gestionarla correctamente. Posteriormente se inicializa la placa,
definiendo los parámetros que la identifican para que los dispositivos físicos de la
misma puedan ser operados por los programas. En la siguiente etapa se recoge la
primera medida del potenciómetro, que debe realizarse con un ángulo de paso conocido
(por ejemplo paso nulo); también se configuran las interrupciones. Posteriormente se
genera el menú de usuario con las distintas opciones para tomar medidas y almacenar
datos. Dentro de estas opciones se encuentra la función que arranca el proceso de
medidas y ejecuta las funciones necesarias para realizar las mediciones y los cálculos.
La última etapa del programa libera los recursos y sale del menú de usuario. En la
siguiente página se muestra un diagrama de flujo con el funcionamiento del programa.
4:18
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
`M´
Main
`P´
Medidas
`B´
Ini Driver
Interrupción
Borrar
Para
Ini Placa
Ini A/D
Fin Medidas
Calibración
Potenciómetro
Interrupción
(Derivada)
Medida pot
Medidas
Lectura
Medida_
`S´
SI
NO
Conversión
A/D
Cálculo
Derivada
Para
Libera
Pantalla
/
Disco
Paso
Fin
return
`P´
NO
SI
Fin
Figura 4.14: Diagrama de flujo del funcionamiento del programa dcolecdsk
4:19
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
4.3.2 Programa informático
El programa dcolecdsk.c requiere su código de cabecera dcolecdsk.h para ser
compilado correctamente. En esta cabecera se definen todas las variables globales que
intervienen en el programa y la estructura básica de cada función que se va a desarrollar.
El código en lenguaje C se detalla en los anexos del documento y una descripción de
sus funciones y comandos se expone a continuación.
⇒ int main( )
Ésta es la función principal del programa, y como es habitual en un código en C,
alberga toda la secuencia de instrucciones y demás funciones secundarias del
programa. Se puede dividir en 5 secciones perfectamente definidas:
1. Inicialización del Driver
Se inicializan todas las funciones de gestión de la placa.
2. Inicialización de la placa
Se inicializan los dispositivos periféricos para que estén a disposición de las
instrucciones de la CPU.
3. Inicialización del sensor
Se mide la tensión del punto de calibración, que debe tener un ángulo de paso
conocido. A partir de este punto se calcula el ángulo de paso correspondiente
a cualquier medida posterior. Este diseño permite desmontar el sensor y
montarlo sin tener que realizar un proceso de calibración manual que altere el
código programado. Dada la linealidad del potenciómetro, también permite
variar la tensión de alimentación sin modificar dicho código.
4. Toma de medidas
Se presenta un menú en pantalla que permite al usuario emprender varias
acciones según la opción que elija:
‘M’ – Comienzan las interrupciones cíclicas, con las medidas del sensor, su
presentación en pantalla y su almacenado en disco hasta que el usuario las
detenga.
‘P’ – Detiene las interrupciones.
‘B’ – Borra todos los ficheros que existan en memoria con datos de
mediciones anteriores.
4:20
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
5. Finalización
Se liberan los recursos utilizados por el Driver de la placa y se finaliza el
programa. Para pasar a esta sección se debe pulsar ‘S’ en el menú de toma de
medidas.
⇒ void arranca( )
Esta función sirve de intermediaria para poder iniciar las interrupciones en el
formato recomendado en los manuales de programación de la Hércules. Este
formato incluye una comprobación de error con mensaje en pantalla si éste se
produce.
⇒ void para( )
Esta función detiene las interrupciones y libera los recursos empleados en las
mismas.
⇒ void interrupcion(void* params)
Esta función arranca el proceso de interrupciones para realizar las medidas y genera
los archivos donde posteriormente guarda los datos de dichas medidas. Se ejecuta
en su totalidad cada 20 ms. Su dinámica es por lo tanto 8 veces más rápida que la
de las interrupciones en el sensor de r.pm. Esta diferencia es coherente con la
mayor rapidez de la dinámica de paso colectivo frente a la dinámica de las r.p.m. del
rotor principal.
⇒ void derivada(DFLOAT *PTt_j, DFLOAT *PTpaso_j)
Esta función calcula la derivada del ángulo de paso a partir de las medidas que le
proporciona la función medida_pot. Para que pueda utilizar como argumentos
valores del paso colectivo que se obtienen en tiempo real la función se ha
implementado mediante punteros a una variable de paso en memoria. Esta técnica
simplifica el programa, permite operar en tiempo real y elimina la necesidad de
crear vectores de datos. El inconveniente es que modifica continuamente el espacio
asignado a la variable de paso en la memoria del ordenador, “pisando” el valor de la
medida anterior. Siempre que sea posible, es deseable utilizar variables locales en
las funciones.
⇒ DFLOAT medida_pot( )
Esta función se puede dividir en dos secciones bien definidas. En la primera se lee
un valor analógico de tensión que se transforma en un valor digital y se asigna a una
variable en memoria (voltage), según el procedimiento descrito en la sección
“Cálculo del ángulo de paso”. En la segunda se calcula el ángulo de paso también
según el procedimiento descrito en dicha sección. La función devuelve el valor del
paso para que la función derivada calcule la variación de paso entre la medida
anterior y la actual y la función interrupción lo muestre todo por pantalla y lo
escriba a un fichero.
4:21
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
4.3.3 Cálculo del ángulo de paso
Para obtener el paso de las palas del rotor en función de la tensión medida, el
programa utiliza una ecuación que aproxima a la curva característica del sensor en sus
variables tensión-ángulo de paso. Esta curva se ha calculado realizando mediciones, con
el potenciómetro alimentado a 10V (tensión elegida para la operación normal), de la
salida del potenciómetro para valores conocidos del ángulo de paso. Para determinar el
ángulo en cada punto de medición, se han utilizado en paralelo un nivel (para ángulo de
paso nulo) y los valores en grados {12 6 0 -4 -8}. Estos valores vienen identificados en
un indicador mecánico situado en la cabeza del rotor del Raptor. Otra alternativa que se
estudió es realizar fotografías del rotor en distintas posiciones y medir el ángulo entre el
perfil de la pala del rotor y el perfil del estabilizador, ya que es éste último la referencia
respecto a la cual se mide el paso colectivo, por formar las palas del estabilizador un
plano perpendicular al eje del rotor.
Para cada ángulo se ha medido la tensión de salida del potenciómetro y se han
ajustado los puntos resultantes. Según las especificaciones del potenciómetro, la
relación entre ángulo girado en el eje y aumento de la resistencia es lineal. Al ser
también la relación entre tensión y resistencia lineal, se deduce que la relación entre
tensión y ángulo girado en el eje del potenciómetro es lineal. El eje del potenciómetro
es coincidente con el eje del servomecanismo del paso colectivo, y el movimiento se
transmite finalmente hasta las palas mediante un mecanismo rígido de palancas y
articulaciones. El modelado de dicho mecanismo se sale de los objetivos de este
proyecto, pero podría ser útil para corroborar los resultados obtenidos. La regresión
lineal de los datos experimentales se ha realizado con Microsoft Excel y ha
proporcionado un valor del coeficiente r2 de Pearson de 0.9946, siendo r2=1 una
dependencia lineal perfecta entre los dos conjuntos de datos sobre los que se realiza la
regresión; en nuestro caso valores de tensión frente a valores de ángulo de paso. A
continuación se presentan: los conjuntos de datos y las ecuaciones de la recta de
regresión y del coeficiente r2.
6
0
y ≡ Paso (º )
− 4 −8 ⎤
⎥ ;
4.57 5.11 5.42 5.89⎥⎦
x ≡ Tensión (V )
⎡ 12
⎢
⎢⎣4.12
y = −11.392 ⋅ x + 58.411
r=
n(∑ xy ) − ∑ x ∑ y
2 ⎤⎡
2⎤
⎡
2
2
⎢n ∑ x − (∑ x ) ⎥ ⎢n ∑ y − (∑ y ) ⎥
⎣
∗
⎦⎣
⎦
con n siendo el número de muestras, 5 en nuestro caso.
4:22
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
A continuación se presenta la gráfica de la recta característica del potenciómetro:
Recta característica del potenciómetro
15
10
y = -11,392x + 58,411
R2 = 0,9946
5
Paso
Paso Colectivo
Lineal (Paso Colectivo)
0
0
2
4
6
8
-5
-10
Tensión
El valor que realmente caracteriza al sensor potenciómetro es la pendiente de esta
recta, ya que como se ha especificado en el apartado de descripción del programa
informático, cada vez que se realizan medidas se calibra el sensor con el valor de
tensión de paso nulo, o palas niveladas. Así se garantiza que si por cualquier motivo
nos hemos desplazado en el intervalo de tensión del potenciómetro (por ejemplo por un
reajuste o recolocación del sensor), las medidas siguen siendo correctas y los resultados
son coherentes. Se puede establecer un periodo de tiempo para revisar periódicamente
la recta característica, evitando así la degradación de las medidas por desajustes en el
potenciómetro o degradación del mismo.
Una vez se tiene la ecuación con el punto de paso nulo definido (el sensor ha sido
calibrado por el programa informático), se obtiene cada 20 ms el valor del paso
colectivo de las palas, calculado introduciendo el valor de tensión medido en la
ecuación de la recta y obteniendo el valor de paso asociado.
4:23
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
4.3.4 Cálculo de la derivada del ángulo de paso
El cálculo de la derivada del ángulo de paso se incorporó al proyecto para obtener a
partir de una misma aplicación dos variables de estado valiéndose de su relación
matemática. La función que la calcula forma parte del código del programa que mide el
ángulo de paso. Para poder utilizar valores de paso almacenados en memoria en una
interrupción (y borrados en la siguiente) sin ocupar innecesariamente grandes
extensiones de memoria con interminables arrays y además poder obtener la derivada
en tiempo real a la vez que se medía el paso se optó por utilizar un tipo de variable que
en C se denomina puntero. Esta variable es en sí una dirección de memoria en la que se
guarda la variable con la que el programador realmente quiere operar. Los argumentos
que se pasan a la función son estos punteros, y la función opera con la variable que se
encuentre en la dirección en memoria hacia la que están apuntando. Es una técnica,
denominada indirection por los creadores del lenguaje, que permite utilizar como
variable de entrada a una función una variable que cambia y desconocemos antes de
cada ejecución de la función, pero cuyo emplazamiento permanece inalterado.
Una vez aplicada esta técnica se puede aplicar un algoritmo con “variables de paso”
como el que se utilizaría en MATLAB o Mathematica, programas de cálculo numérico (y
simbólico en el segundo caso) de amplia profusión en aplicaciones científicas y
tecnológicas. En estos programas no es necesario aplicar punteros porque los
programas se encargan de hacer el “trabajo de fondo” con la memoria del ordenador y el
usuario sólo se tiene que preocupar de los aspectos matemáticos.
En el aspecto matemático, para calcular la derivada se ha empleado la medida actual
y la medida de la interrupción anterior, aproximándola con la pendiente de la recta que
une los puntos correspondientes a ambas medidas. Se ha utilizado esta fórmula por ser
la de mayor simplicidad de cálculo y porque sólo requiere almacenar dos valores de
paso colectivo en memoria, que son reemplazados en cada interrupción con una
secuencia FIFO (First In First Out). Mayor precisión en la derivada se puede obtener
utilizando fórmulas de derivación numérica con más puntos de aproximación. A
continuación se presenta el algoritmo empleado:
paso j = ∗PT paso j
⇒ t j = ∗PT t j
pasok − paso j
d
( paso ) = 1000 ⋅
dt
tk − t j
⇒
pasok = pasocolec
⇒ ∗PT t j = t k
⇒ t k = tini
⇒ ∗PT paso j = pasok
Se puede observar cómo se busca en memoria mediante los punteros (PTabc),
recurriendo a la asignación mediante la técnica de indirection (mediante el símbolo
“*”), a los valores de paso colectivo y tiempo de interrupción medidos en la
interrupción j. Con esos valores y los valores de la interrupción actual se aproxima la
derivada mediante la pendiente de la recta que los une, corrigiendo el valor para que las
unidades sean º/s. Los valores de paso y tiempo de la interrupción actual se asignan a
los espacios en memoria a los que señalan los “punteros de paso”, y el ciclo se repite de
forma idéntica en la siguiente interrupción.
4:24
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
4.3.5 Librerías de funciones utilizadas
Para obtener toda la funcionalidad deseada del programa se ha recurrido a varias
librerías estándar ANSI de programación en C, además de una librería específica
suministrada por Diamond Systems con funciones que gestionan los circuitos de la
placa. Las librerías ANSI utilizadas son:
•
•
•
•
stdlib.h
stdio.h
math.h
time.h
Estas librerías están incluidas en el compilador GCC de Linux. Las funciones de
gestión de la placa están englobadas en el “driver” DSCUD 5.7. Se suele denominar
driver a la librería que contiene funciones para gestionar un determinado dispositivo
informático. En la jerga comercial se mencionan con frecuencia los drivers de la tarjeta
de sonido, la tarjeta gráfica u otros dispositivos periféricos relevantes de un ordenador.
En nuestro driver se encuentran funciones necesarias para iniciar y configurar el circuito
de adquisición de datos, las señales PWM, el contador interno y otras utilidades que
empleamos en nuestro programa informático. Esta librería o driver se denomina
dscud.h.
El procedimiento necesario para acceder a la librería dscud.h es el siguiente:
•
Se carga la librería en el sistema operativo ejecutando el archivo:
“/usr/local/dscud5/load.sh”
•
Para compilar el programa será necesario incluir las librerías mencionadas
con los siguientes añadidos al comando gcc:
“-L/usr/local/dscud5 -L/opt/dscud5 -ldscud5 –pthread -lm
-I/usr/local/dscud5 -I/opt/dscud5”
Tanto el programa elaborado para la adquisición de medidas con el sensor óptico
como el programa elaborado para el potenciómetro deben seguir un proceso muy
parecido de ejecución de funciones del driver de la placa. Esta secuencia de funciones
con las variables utilizadas se detalla a continuación:
4:25
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
4.3.6 Funciones de la placa
Inicialización del driver:
BYTE dscInit(WORD version)
Inicialización de la placa:
BYTE dscInitBoard(BYTE boardtype, DSCCB* dsccb, DSCB* board)
donde ‘DSCB’ es un tipo ‘SWORD’ y ‘DSCCB’ una estructura con los siguientes
parámetros (a configurar a la hora de inicializar la placa):
BYTE boardtype
DSCB boardnum
WORD base_address
BYTE int_level
BOOL RMM_external_trigger
BOOL RMM_external_trigger_c3
WORD EMM_IOAddr[8]
WORD EMM_Interrupt[8]
BYTE clkfrq0
BYTE clkfrq1
BYTE clksel1
WORD address_space
Liberación de recursos:
BYTE dscFree(void)
Funciones de adquisición de datos analógicos
Cambio de parámetros A/D:
BYTE dscADSetSettings(DSCB board, DSCADSETTINGS* adsettings)
Donde ‘DSCADSETTINGS’ es una estructura con los siguientes parámetros:
BYTE current_channel
BYTE gain
BYTE range
BYTE polarity
BYTE load_cal
BYTE scan_interval
4:26
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
Conversión A/D:
BYTE dscADSample(DSCB board, DSCSAMPLE* sample)
Siendo ‘DSCSAMPLE’ un tipo ‘SWORD’.
Escaneo A/D:
BYTE
dscADScan(DSCB
board,
DSCSAMPLE* sample_values)
DSCADSCAN*
dscadscan,
donde ‘DSCADSCAN’ es una estructura con los siguientes parámetros:
BYTE current_channel
BYTE gain
BYTE range
BYTE polarity
BYTE load_cal
BYTE scan_interval
Conversión D/A:
BYTE dscDAConvert(DSCB board, BYTE channel, DSCDACODE
output_code)
donde ‘DSCDACODE’ es un tipo ‘DWORD’.
Interrupciones de usuario
Inicialización de las interrupciones:
BYTE
dscUserInt(DSCB
board,
DSCUserInterruptFunction func)
DSCUSERINT*
dscuserint,
donde ‘DSCUSERINT’ es una estructura con los siguientes parámetros:
BYTE intsource
FLOAT rate
BYTE clksource
BYTE counter
DWORD int_type
DSCUserInterruptFunction func
y ‘DSCUserInterruptFunction’ se corresponde con el nombre de la función que se
ejecutará en cada interrupción y que tendría la siguiente definición:
void (*DSCUserInterruptFunction) (void* parameter)
4:27
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
Detención de las interrupciones:
BYTE dscCancelOp(DSCB board)
Eliminación y liberación de las interrupciones:
BYTE dscClearUserInterruptFunction(DSCB board)
4.4 Montaje del sensor
Una de las tareas con mayor carga de diseño del sensor de paso colectivo ha sido el
diseño y construcción del soporte para unir solidariamente el potenciómetro con el
mecanismo de colectivo. Tras barajar varios posibles emplazamientos, algunos
asociados incluso a tecnologías sensoriales distintas, se llegó a la conclusión de que el
punto de unión más cómodo y con más posibilidades de diseñar un montaje exitoso es la
cabeza del servomecanismo. Era necesario un mecanismo de unión que garantizara el
movimiento al unísono de los ejes de servomecanismo y potenciómetro. A su vez, el
mecanismo de unión no podía impedir o entorpecer apreciablemente el movimiento del
servomecanismo, ya que esto incidiría sobre el mecanismo de movimiento de las palas
directamente. La configuración geométrica del mecanismo de unión se ilustra a
continuación.
Figura 4.15: Detalle de la estructura de fijación del potenciómetro al helicóptero
4:28
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
4.4.1 Fijación mecánica
Estando decidido el emplazamiento, el siguiente paso era elegir un mecanismo de
unión adecuado.
De nuevo se planteaban varias posibilidades, de costes y
especificaciones dispares. Entre ellas estaba la unión del eje del potenciómetro y una
prolongación (a determinar) del eje del servomecanismo mediante tubos de silicona,
fijando al fuselaje la carcasa del potenciómetro. Otra posibilidad era utilizar un soporte
cilíndrico que encapsulara al potenciómetro, impidiendo así su movimiento libre, y
estuviera fijado de alguna forma (a determinar) a la cabeza del servomecanismo. En
esta opción se utilizaría algún mecanismo para garantizar el movimiento solidario de
ambos ejes. La tercera opción, que resultó elegida, se basa en una pieza mecanizada
metálica que une solidariamente la cabeza del servomecanismo (modificada) con el eje
del potenciómetro. Esta pieza se mecanizó a partir de un mando de potenciómetro
comercial, similar a los que se utilizan, por ejemplo, en los mandos de volumen de un
equipo de sonido de alta fidelidad. El cuerpo del potenciómetro se fija al fuselaje
mediante una estructura de chapa de aluminio y un tornillo de acero de gran calibre.
La elección de una fijación mecanizada y atornillada responde a la necesidad de un
soporte duradero para el sensor, suficientemente liviano para no sobercargar el eje del
servomecanismo y con la suficiente rigidez para transmitir con un error aceptable el
movimiento entre los ejes del servo y del potenciómetro. Por este motivo se aceptó esta
solución pese a presentar un coste más elevado y la necesidad de recurrir a un taller de
mecanizado con torno de cilindrado y taladro. A continuación se describen las piezas
que lo conforman.
La cabeza del servomecanismo, en origen de plástico, se cambió por una de
aluminio para garantizar su integridad cuando fuera atornillada al mando cilíndrico de
aluminio que soporta el potenciómetro. Esta cabeza debe soportar el par de oposición
que genera el peso del sensor y las vibraciones que aparecen con el helicóptero en
funcionamiento.
El mando cilíndrico de aluminio, en origen de tapa plana y con un prisionero
roscado para impedir el movimiento libre del eje del potenciómetro, sufrió varias
modificaciones para poder integrarlo lo más posible en la configuración deseada. Se
realizó un taladro ciego en el centro de la tapa para que no entorpeciera a la cabeza del
tornillo del eje del servomecanismo, permitiendo así que el sensor sobresalga lo menos
posible de la geometría del helicóptero. Se realizaron dos taladros pasantes sobre un
diámetro de la tapa, simétricos respecto del eje y paralelos al mismo, para introducir los
tornillos de fijación a la cabeza del servo. Finalmente, se realizó un cilindrado en la
cara que da al potenciómetro para aligerar material y reducir el peso de todo el soporte.
También se ensanchó el taladro del prisionero para que pudiera entrar el eje del
potenciómetro. A continuación se ilustran la cabeza del servomecanismo (aluminio
pintado en morado) y el mando cilíndrico modificado (aluminio). Se pueden observar
los dos taladros paralelos al eje del potenciómetro, en los que se introducen los tornillos
de fijación a la cabeza del servo. Igualmente, se observa en la superficie exterior curva
del cilindro el taladro en el que se introduce el prisionero que atrapa al eje del
potenciómetro.
4:29
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
Figura 4.16: Detalle de la interfaz entre potenciómetro y servomotor
En cuanto a la estructura de fijación del cuerpo del potenciómetro al fuselaje del
helicóptero, se corto una chapa de enlace a partir de una lámina de aluminio comercial.
Se realizaron taladros en los dos extremos de la chapa para que pasaran el eje del
potenciómetro y el tornillo de fijación al fuselaje. En ambos taladros se utiliza una
tuerca de fijación ya que el eje del potenciómetro está roscado en un segmento próximo
al cuerpo del mismo precisamente para facilitar este tipo de operaciones y el tornillo del
fuselaje es de rosca métrica. Se realizó un pequeño taladro de fijación en el que encaja
un pequeño tetón situado en el perímetro del cuerpo del potenciómetro. Este tetón fija
la chapa al potenciómetro e impide que ésta gire en torno al eje del mismo aunque se
afloje la tuerca que la mantiene cogida en dicho eje. Es por tanto el mecanismo que
garantiza que el cuerpo del potenciómetro no gire respecto del fuselaje del helicóptero,
permitiendo así medir con precisión los giros del eje del potenciómetro, que son, debido
a la unión rígida entre ambos, los giros del eje del servomecanismo. A continuación se
ilustran la estructura de fijación al fuselaje y sus piezas y principales características.
4:30
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
Figura 4.17: Detalle de la estructura de fijación del potenciómetro al helicóptero
Se observa la chapa de aluminio de color blanco con la que se fija el cuerpo del
potenciómetro, en rotación y desplazamiento, a la estructura del helicóptero. Se
consigue que el cuerpo del potenciómetro no rote haciéndolo atravesar la chapa en dos
puntos de la misma. En un punto la atraviesa con su propio eje. En el otro punto la
atraviesa con un pequeño saliente cilíndrico diseñado para cumplir esta función de
fijación. En ambos puntos de enganche el ajuste requiere una ligera presión para
introducirse correctamente, garantizando la ausencia de giro relativo entre la cabeza del
potenciómetro y la estructura del helicóptero. La chapa se une al fuselaje mediante un
perno con las tuercas correspondientes. Se plantea para futuros desarrollos la
posibilidad de utilizar tuercas no-metálicas y tuercas de seguridad para reducir
vibraciones y evitar el afloje de las fijaciones, respectivamente.
4:31
INGENIERÍA DE SISTEMAS Y AUTOMÁTICA
PROYECTO DE FIN DE CARRERA
4.4.2 Cableado y conectores
Para dirigir las tres líneas eléctricas desde el potenciómetro a la placa Hércules se
han utilizado tres cables independientes de microelectrónica de 1 mm de calibre. La
longitud de estos cables es de aproximadamente 0.5 metros, ya que tienen que hacer un
recorrido de este orden desde la mitad superior del helicóptero hasta la caja de aviónica,
que va ubicada debajo de los patines. Para mayor compacidad y mejor resistencia al
ambiente se han agrupado los cables en un mazo protegido por un tubo de silicona
transparente. Desde la caja de aviónica salen otros tres cables idénticos, soldados a los
pines que corresponden, que también se han agrupado en un mazo protegido por el
mismo tubo. Ambos mazos se han conectado mediante un conector roscado de
microelectrónica de 4 pines, dejando ciego 1 de los 4. Este conector aporta durabilidad
al diseño y está diseñado para entornos no protegidos, como puede ser la nave de un
laboratorio para su almacenaje o el aire libre para uso durante un tiempo limitado del
sistema. Además, este conector permite separar el helicóptero de la caja de aviónica
con facilidad, y sin necesidad de herramientas. A continuación se muestran fotos del
cableado y el conector.
Figura 4.18: Cables y conectores empleados
4:32